基于模糊综合评价法的仿真环境复杂度评估研究
2023-03-09靳同欣卢华燕
靳同欣,卢华燕
(1.河北经贸大学管理科学与工程学院,河北 石家庄 050061;2.石家庄致顶计算机科技有限公司,河北 石家庄 050046;3.河北地质职工大学,河北 石家庄 050081)
jtxcfl@qq.com;153414139@qq.com
1 引言(Introduction)
环境的复杂程度与多种不确定性相互关联、相互影响的因素相关,在进行仿真时很难预料或模拟环境的变化[1]。本文从影响因素是否复杂的角度对环境进行分析、研究,得出地形、电磁、障碍物和气象为影响环境的主要因素。
本文使用层次分析法对影响环境的因素进行分析,计算出各指标权重;使用模糊综合评价法对各影响因素建立隶属度模型,结合指标权重值进一步计算各因素的复杂度,并根据复杂度评估准则,分析同一复杂度在不同运用场景中所对应的复杂等级。
2 评价方法理论(Evaluation method theory)
2.1 层次分析法
层次分析法(AHP)是美国运筹学家匹茨堡大学教授萨蒂于20 世纪70 年代初提出的一种层次权重决策分析方法[2-4],是一种对难以完全定量的复杂系统做出决策的模型和方法。首先将目标评价系统分解为多个能够形成递进式的目标或准则,然后将这些目标或准则构建成层次评价结构,形成指标体系。在此基础上,通过构造判断矩阵,并对判断矩阵进行归一化处理、一致性检验等,对各指标进行权重计算,为多目标、多准则的复杂决策问题提供决策方法[5]。
2.2 模糊综合评价法
模糊综合评价法是一种以模糊数学原理为基础,以定性和定量相结合的分析评估方法,常用于难以用数学方法精确描述的复杂问题。运用模糊数学法,可以很好地解决难以量化、信息缺失、决策目标层模糊的问题[6-7]。
模糊综合评价法能够通过构造模糊矩阵,把所要反映的事物的模糊指标进行量化,并运用模糊变换原理,首先对各指标的权重进行计算,然后对各个指标进行全面、系统的综合评估[8]。因此,这种方法可以很好地对定性指标进行量化分析。
2.3 粒子群算法
粒子群算法(PSO)是一种进化算法,是一种求得近似最优解的算法。粒子群算法具有一定的随机性,所以每次执行结果可能并不是一样的,这就意味着有时候可能得到更优解[9]。使用基于粒子群算法对构造的判断矩阵进行修正,使判断矩阵一致性能够近似最优。
3 基于层次分析法的模糊综合评价(Fuzzy comprehensive evaluation based on analytic hierarchy process)
3.1 评价指标体系的建立
会对环境复杂度产生影响的因素有很多,在本研究中主要针对影响较大的因素进行模拟仿真。经分析,确定对环境影响较大的因素主要为地形、障碍物、电磁和气象,对这些因素进行指标划分[10]如图1所示。
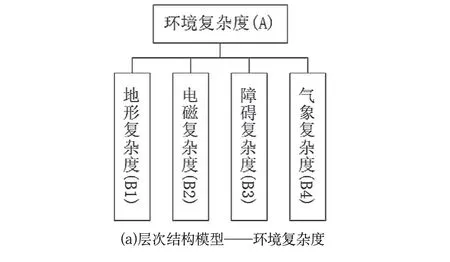

图1 评价指标体系Fig.1 Evaluation index system
3.2 判断矩阵构造与一致性调整
构造判断矩阵时,引入一种标度用于指标之间的量化比较,以“1—5”标度为例,指标i与指标j进行比较时,1、3、5分别表示指标i与指标j同等重要、重要、非常重要,2、4为上述重要性的中间值。当指标j比指标i重要时,则取上述标度的倒数[11-12]。
其中,n为矩阵的阶数。
完成对判断矩阵的一致性检验后,需要计算一致性比例CR,以判断矩阵是否满足一致性要求:
通常情况下,当CR<0.1时,判断矩阵满足一致性要求;当CR>0.1时,判断矩阵不满足一致性要求,但可以采用粒子群算法,对判断矩阵做适当修正[11-13],使判断矩阵满足一致性要求。
环境复杂度矩阵A:
电磁复杂度B2和障碍物复杂度B3无下级指标,B2和B3均为1阶矩阵,满足一致性要求。
气象复杂度矩阵B4:
3.3 底层指标隶属度建模和计算
为完成环境复杂度评估,需要从底层开始逐层向上分别计算各指标的复杂度。根据各指标在仿真中对环境影响情况的统计分析,常用隶属度模型有成本型、效益型、双边型和开关型四种[14-15]。底层指标隶属度函数如表1所示。
底层指标隶属度可通过专家对底层指标进行设置,使用表1中相应的计算公式进行计算[15]。
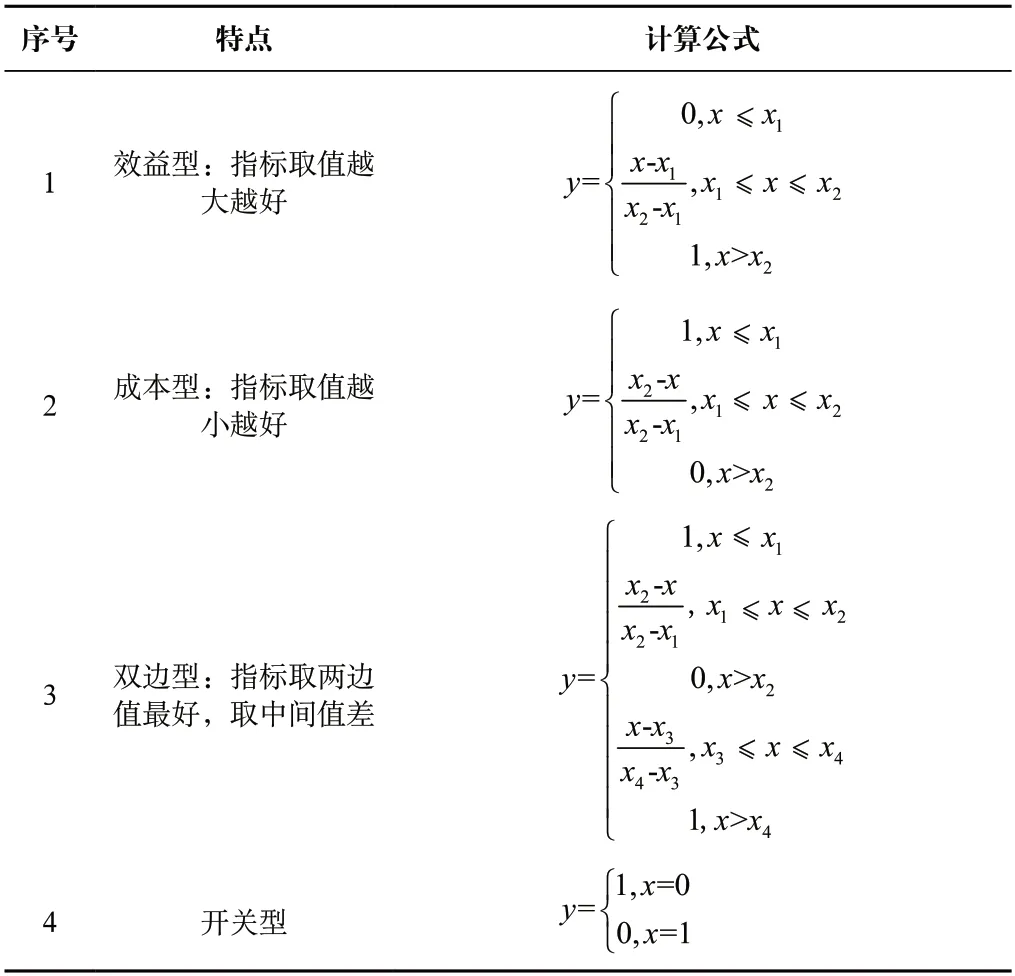
表1 底层指标隶属度函数Tab.1 Membership function of underlying indicators
效益型指标主要包括河网密度(C12)、植被覆盖率(C15)、地质条件(C16)、高程(C21)、高差(C22)、高差分布(C23)、坡度(C24)、坡度分布(C25)、割裂度(C26)、割裂度分布(C27)、空气质量(C53)、气压(C61)、雷电(C71)、风力(C81)、降水(C82)。
成本型指标主要包括涵道密度(C11)、道路密度(C13)、桥梁密度(C14)、铁路密度(C17)、中心设置条件(C31)、储备条件(C32)、有线线路(C34)、通视方位角(C41)、通视高低角(C42)、可射高低角(C43)、可射方向角(C44)、能见度(C83)。
双边型指标主要包括温度(C51)、湿度(C52)、日照(C63)。
开关型指标主要包括类机场条件(C18)、集结隐蔽区(C33)、技术保障(C35)、后勤保障(C36)、风向(C62)。其中,类机场条件(C18)当存在能够起落固定翼飞机的机场条件,取0,当只能起落运物起重机时,取0.5,当任何载人飞机均无法起落时,取1;集结隐蔽区(C33)当满足集结隐蔽区要求的取0,不能满足的取1;技术保障(C35)满足技术保障要求时隶属度取0,不能满足取1;后勤保障(C36)当具有自有水井时取0,无清洁水源时取1;风向(C62)当逆风时隶属度为1,顺风时隶属度为0。
3.4 中间层指标复杂度计算
3.4.1 地形复杂度
地形复杂度从底层指标逐级计算复杂度:
其中,Ft表示地形复杂度;n表示地形复杂度下级指标数;wi表示地形复杂度节点下第i个节点的权重值;fi表示地形复杂度节点下第i个节点的复杂度值。
3.4.2 电磁复杂度
定义电磁复杂度系数DO:
电磁复杂度为效益型指标,在计算隶属度时将评估对象得到的DO值代入效益型公式即可得到。当功率频谱达不到条件时,按其上限赋值[16-17],其计算规则如表2所示。
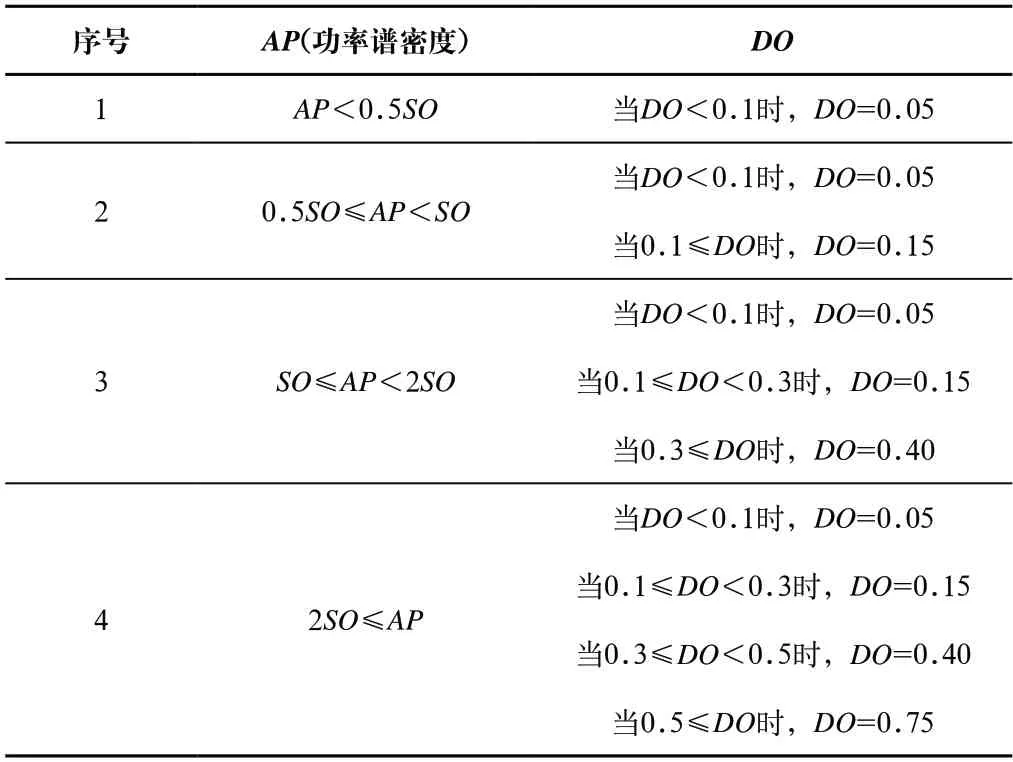
表2 电磁复杂度系数计算规则Tab.2 Calculation rules of electromagnetic complexity coefficient
3.4.3 障碍物复杂度
障碍物的障碍能力通过分析人员通过障碍区的时间获得,主要包括克服障碍物的时间和通过障碍区的时间。
式中,ti为克服第i类障碍物所需时间(min);n为障碍种类总数;x为人员克服障碍综合修正系数。
(2)通过障碍区的时间。通过障碍区的总时间(min)Tt如下:
式中,w为人员通过障碍区的综合迟滞系数;L为障碍区的纵深。
(3)障碍物的迟滞效能。障碍物的迟滞效能是指人员在一定的距离内通过有障碍区和无障碍区的时间比,其公式如下:
式中,u为障碍物的迟滞效能;Tk为克服障碍的总时间(min);Tt为通过障碍的总时间(分钟);L为障碍区的纵深。
(4)归一化处理。当迟滞效能u>2时,障碍物复杂度为1;当迟滞效能u=1时,障碍物复杂度为0;当迟滞效能1≤u<2时,障碍物复杂度为u-1[16]。
3.4.4 气象复杂度
气象复杂度的计算方法与地形复杂度相同,从底层指标逐级计算指标的复杂度:
式中,Fa为气象复杂度;n为气象复杂度下级指标数;wi为气象复杂度节点下第i个节点的权重值;fi为气象复杂度节点下第i个节点的复杂度值。
3.5 复杂度水平评价准则
地形复杂度、障碍复杂度、气象复杂度和电磁复杂度评价准则如表3—表6所示。

表3 地形复杂度评价准则Tab.3 Evaluation criteria of terrain complexity level
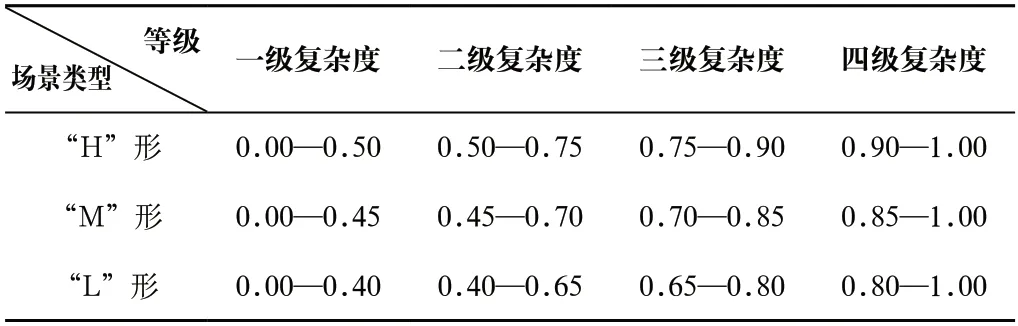
表4 障碍复杂度评价准则Tab.4 Evaluation criteria of obstacle complexity
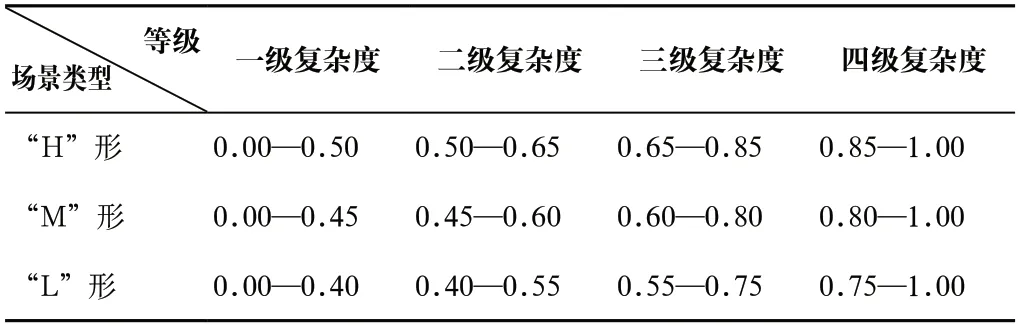
表5 气象复杂度评价准则Tab.5 Evaluation criteria of meteorological complexity

表6 电磁复杂度评价准则Tab.6 Evaluation criteria of electromagnetic complexity level
3.6 评估结果
根据专家对各指标的评分和计算各指标权重,环境复杂度评估结果如图2和图3所示。

图2 环境复杂度评估结果Fig.2 Environmental complexity assessment result
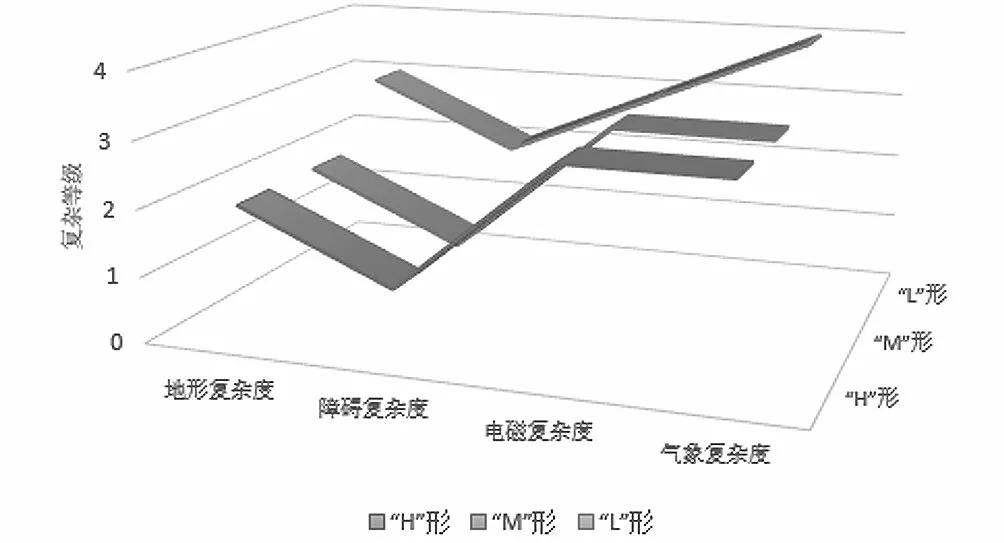
图3 环境复杂度等级分布Fig.3 Distribution of environmental complexity level
4 结论(Conclusion)
影响环境的因素很多,本文使用层次分析法和模糊综合评价法对一些主要影响因素进行定量分析,并得出相同复杂度在不同应用场景中,复杂等级不同的结论,为依据环境复杂度进行决策的应用提供数据支持。本文提取的环境复杂度指标具有一定的代表性,但因为地域、应用场景和范围不同,可能会有更多因素影响环境的复杂度,所以对特定的环境因素有待更深入的研究。
