无人机技术在潮南区龟头海水闸工程中的应用
2023-03-08唐双平
唐双平
(广东珠荣工程设计有限公司勘察测绘部,广州 510610)
1 工程概述
新建龟头海闸站工程是一宗以挡洪挡潮为主、结合排涝、通航的综合水利工程。初拟闸址位于龟头海支流与练江干流汇入口上游1500m 处,控制集水面积110.88km²。闸址处龟头海支流主河道宽约235m,河道底高程为-2.0~-3.7m。
本工程为方案规划阶段,现阶段需对拟建水闸工程范围内的河流、田间地形高程及相关建筑物高程进行航拍及测量。航拍的主要任务是对河道(龟头海支流、半港河、大寮港北港、大寮港南港、伯公头港以及新坛港等河道)、片域(拟建闸址附近片区)、及其他范围(如沿井田公路、林木分布)进行测绘,并对海门湾桥闸、半港水闸、大寮水闸、伯公头水闸、新坛水闸以及陇田涝区泵站等建筑物的特征高程进行测量。
无人机航测系统组成复杂,航测系统在众多领域有非常重要的应用,如土地利用率监测、矿产监测、地质环境监测、海洋资源探测、林木草场监测等等[1-3]。本次研究基于龟头海闸站水利工程的新建,在介绍航测方案的同时为业界提供测量经验。
2 无人机航测技术在水闸新建工程中的应用分析
2.1 测量中的应用优势
一般情况下,利用无人机航摄的方法进行测量所选定的区域都是复杂区域、无人区域等地理条件比较复杂的地区,对所要求的测量区域内,高度差不能过大。在水利工程中进行测量时,满足精度的要求下,尽量避免人工测量,因为人工测绘的难度比较大,而且比较危险。在此情况下,选用无人机低空航摄就可以有效的解决测绘问题,另一方面,通过高分辨率的摄像头对地面进行拍摄,以影像预感的方式进行地形图测绘,再对摄像系统搭配以不同的测量设备,在提高测图效率的同时,通过简单地操作高效的保证了高精度的测量任务[4-6]。
2.2 无人机采集影响的内业数据处理技术
2.2.1 影像纠偏处理技术
无人机在低空航摄所拍到的照片会受到地面物体高度差及成像的角度差等影响,此时处于中间位置处的畸变就会比较小,但在成像的边缘位置处的局变就会比较大,从而使得在相片上的每一个像点的比例都不尽相同。在此情况下,影像纠偏技术随之应用而生,此技术是通过对相机检测内方位元素进行计算,处理变形值,以使得图像能从中心投影的形式变为正投影[7-9]。
2.2.2 空三加密处理技术
目前应用最广泛的各种空三加密软件的具体使用方法、步骤是基本差不多的,主要包括新建工程、导入航摄数据、航带生成、同名点提取、刺点测量及精度评估等操作。
2.2.3 DLG生产技术
数字化生产作为摄影测量的最终呈现结果,往往使用比较专业的制作软件进行DEM、DOM 等数据生成。基于数据处理软件的数据基础,对三维模型点进行捕捉,同时生产DLG。
2.3 水利工程测量的外业调查测绘技术
2.3.1 建筑物测量
水利工程中采用无人机低空航摄的方式进行测量,由于测量精度受到限制,因此需要对工程实际中一些测量不周的主要区域进行补充测量,使其满足工程测量的基本要求。往往需要对水库坝顶高程、平面桥梁高程、水位高程及临水位高程等等。
2.3.2 地形图调绘
地形图的绘制只要是结合专业的绘图软件对测量区域进行实地测绘,次部分中的工作主要是对测量区域内的建筑特性、通信协议线路、电力线路布局、交通设施等工程进行确定,在调绘的同时结合先进的技术对管线设施也展开测量工作[10-11]。
2.4 低空航摄应用优化措施
低空航摄技术在水利工程中获得了较好的应用效果,但如若想在此领域内继续提高,还应继续深入钻研测量技术。可以通过学习国外无人机技术的先进成果,以加强水利工程方面的应用能力。同时应扩充团队的专业水平,加强技术人员的技能培训、安全操作培训及意外事故应急培训等,最大程度上保证无人机的航测准确性。
3 作业方案
本文以无人机航摄技术在潮南区龟头海水闸新建工程中的应用为例,本次航测系统主要实施了7 个架次的航摄工作,航摄平面控制主要布置四级GPS 网络,一共埋设了4×6 个GPS 标设点位,相近的不同航线之间跨设8~12 条基线。
本工程中主要应用GPS-RTK 进行控点布置,信度为99.9%。在HEMS ≤0.02m,VRMS ≤0.02m时对数据进行采集,最终采用测量均值作为记录结果。航摄主要采用7 个架次的无人机同时进行,航摄仪选用Canon SD.M,其对地面的分辨为17cm,航摄内采用空三加密的Inphor Vituozo NT3.5 对地面地形要素进行采集,采集到主要数据点用CASS9.1 地形成图软件编辑。
4 实施概述
以本次新建的潮南区龟头海水闸工程为实施背景,对航摄所得到的结果及空三测量等数据展开分析。
4.1 低空摄影测量
本次航摄采用七架Camon EOS 5D Mark I 航摄仪,累计总航线为36,相片底张3383 张,航测的结果统计,如表1 所示:

表1 航测结果统计
由上表测量结果可知,航摄图片的倾角<4.5°,且旋偏角<150°,在实际航行过程中,相同航线的不同航次高程差控制在30m 之内,显示航线偏距≤1cm。根据上述结果可以观察到,航摄质量是符合国家航测标准规定的。
4.2 “空三”测量
该流程主要是基于Inpho 软件,利用JPG 格式的像控片和标记说明,并搭配XLS 格式的成果表格,再适配Virtu 的数摄技术对测量结果进行加密。由于该工程的工期较紧张,为了最大程度的赶制工期,在进行数据加密时采用独立加密的方式,对航摄的不同区域内进行独立出图,大大提升了作业的效率。采用7 个架次的航线进行分区加密。
4.2.1 加密点量测和解算
加密点尽量布置在6°航带节点上,将模型连接差降至最低,按标准进行强度检测,在缺少的点进行补点。由于航摄比例均为1:23000,所以对加密所使用的人工切准精度问题需进行第二检验人的合适检查,通过此流程来提高切准可靠性。
4.2.2 平差解算
运用Inpho 系统自带的平差软件进行计算。将区域网平差化,通过剔除粗差、迭代处理、人工编辑等步骤以提高精确程度。
4.2.3 质量控制
加密过程关键是针对性的进行质量控制,检查大概内容包括:航片畸变纠正、信息文件的设置、相机文件的设置等。
4.2.4 质量检查
表2 列出了本次航摄中的精度统计数据,由此数据表可以得到:平面位置最大差值、最小差值分别为为0.313m、0.066m,高程差最大值、最小值分别为0.162m、0.035m,通过上述数据可看出,此模型连接的精度比较高,是满足该项目的规范要求的。本项目空三加密精度统计见表3。
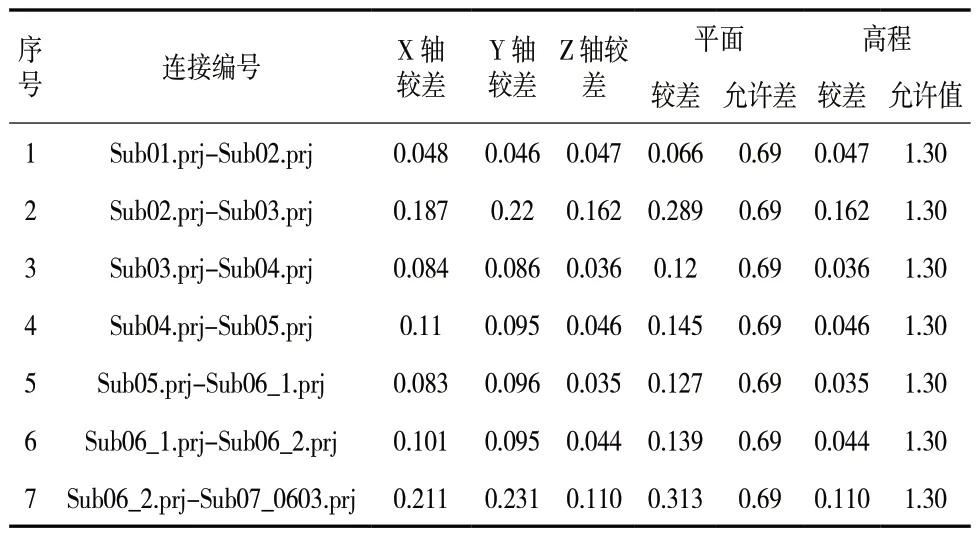
表2 连接较差统计

表3 空三加密精度统计
经过上述结果的汇总统计,加密成果是符合规范要求的,由此可见成图的精度是比较高的,这也完全满足其工程上的需要。根据统计结果可以看出,本工程无人机低空航摄的测量系统在实际应用中完全可靠。
5 DOM 成果质量检查
5.1 像控点检查
潮南区龟头海水闸新建工程中利用RTK 在整个需要测控的区域内布置了118 个厘米级的控制像点,并对DOM 进行影像纠正,此过程采用了90 个像控点进行,其余的28 个地面像控点对影像的纠正采用DOM 进行检查,像控点的误差mD=±0.037m。
标准文件中要求比例尺为1:1000 的DOM 像控点中误差应为0.1mm(实地误差0.1m)。由上表的数据统计结果可以看出,误差仅为0.037m,该值远小于中误差的一半,由此可见本次工程中像控点的精度比较高,观测到的数据准确可信。
5.2 DOM 地物点检查
在确定完像控点的精度后,本工程中也利用了RTK 对整个测区内的28 个随机地物点和DOM 图上的坐标点进行检查,检查结果的详细数据见上表,根据5.1 节中的误差计算公式可得:mD=0.157m。标准要求比例尺为1:1000 的DOM 点位误差为图上的0.6mm(实地误差0.6m),由上述可知,像控点的中误差仅为0.157m,远小于标准中误差。由此可见,本次项目中的DOM 平面位置精度比较高,DOM 的结果数据准确可靠。
5.3 飞行质量检查
对本工程主要对航摄的飞行质量进行检查分析,质检的工作人员对最后的航摄仪及航摄比例进行正确的选择,使航摄分区合理,航摄路线正确可行。尽量保证航摄的时间短,对旁向重叠度、相片倾斜角、行高持续时间、航漏补摄、飞行记录等等进行规范性质量检查。
5.4 影像质量检查
质检人员首先对航摄结果所得的所有影像进行仔细的分析,给出的评价是:整体航摄的影像比较丰富,色彩的反差始终,不存在阴影和云影,也没有大面积的反光和污点,影像见得拼接处理得当,不存在模糊错位现象,质量整体较高,符合标准文件规定。
其中,DOM 的制作关键因素在于正摄像图的制作。像控精度是DOM 制作精度的首要保证,所以对像控点位置的选择便尤为重要。DEM 是DOM的基础,DEM 的精度也是十分关键的,其与像控点的位置、采集精度和刺点精度等都有密不可分的关系,此外还与航摄姿态、重叠度、航旋角及曝光瞬间等因素密切关联。
6 结语
本研究以无人机在潮南区龟头海水闸新建工程中的应用情况为背景,首先对工程的情况做简要概述,在此背景下从影像纠偏处理技术、空三加密处理技术、DLG 生产技术等入手,分析无人机航测技术在水闸新建工程中的具体应用,根据项目的实际实施过程总结出航摄优化措施。
根据实际案例条件出具具体的作业方案,按照方案进行航摄,对空三加密精度、模型计算误差等结果进行统计分析,尤其需要注意像控点的布设形式,为最大程度减小接边误差,尽量采用Inpho 进行自动化处理,采用人机结合的方式进行结果处理,最后对DOM 成果进行质量检查,得出整个航摄结果是符合国标标准的。
