无人直升机自动区域导航设计及工程应用
2023-03-07李逸群
李逸群
概述
直升机是人类历史上研究最成功的仿生机械之一,具有垂直起降、悬停、侧飞及对场地要求不高等优点,随着对现代直升机飞行品质和任务效能要求的日臻提高,无人直升机飞行控制技术也越来越得到重视。区域导航是指允许在确立的点之间的任何直接航路上进行电子的航向引导。区域导航设备通过自动确定直升机位置、建立期望的飞行航迹以及向下一航路点飞行提供航迹引导来运作的导航方式,有着传统导航没有的很多优点。
自动区域导航是无人直升机自动导航功能实现中的一环。当无人直升机受到外界干扰偏离航线情况下,结合航向引导信号实现自动区域导航飞行,重新返回航线。该功能综合惯性导航系统实时解算的侧偏距、偏航角与地速数据生成航向导引信号,通过控制律设计实现直升机对现有航线的跟踪飞行。自动区域导航具有航线编排灵活的特点,通常在高空大速度沿航向稳定飞行时使用该功能。
无人直升机若在平飞过程中受到外界扰动等因素的影响将产生相对于飞行航线的侧向偏离,触发自动区域导航,此时飞控系统一般通过横向驾驶信号对直升机的航向自动修正以减小偏差,保证直升机沿着现有航线飞行。该功能主要通过横滚轴和航向轴的控制实现。在设计自动区域导航时,充分考虑自动区域导航使用的背景,实现尽快切入航线,以最短时间完成飞行计划,因此在最近航段判断、航路点信息发送等内容与航电系统复杂交联。本文完整描述自动区域导航的设计实现方式。
自动区域导航设计
自动区域导航功能是通过导航系统和飞控系统共同实现的。设计自动区域导航时,要充分考虑自动区域导航使用的背景。要尽快切入航段,以最短时间完成飞行计划的航行,因此选取最近航段是设计的关键。自动区域导航通过协同控制,实现对横向驾驶信号实现稳定精确的跟踪。
最近航段判断逻辑
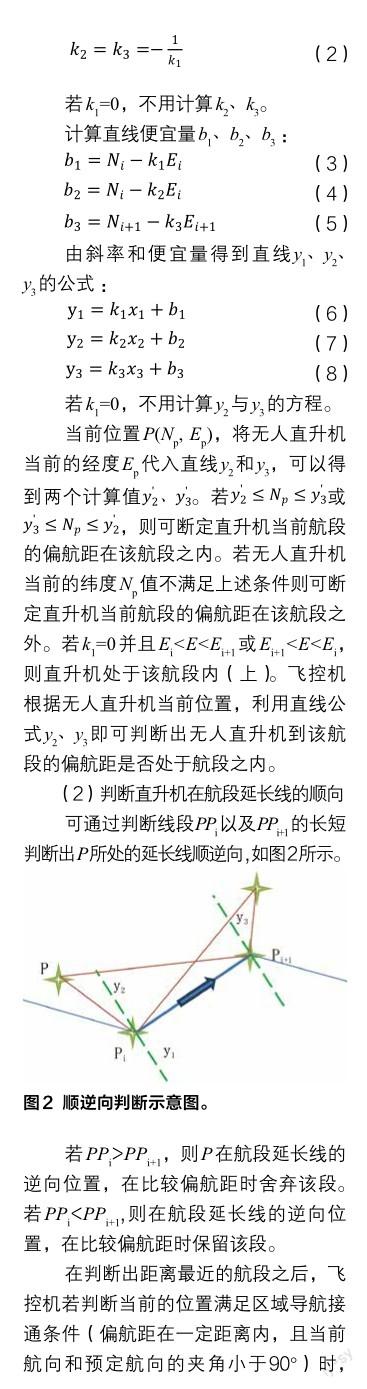
激活一条飞行航线,若航路点有25個点,则有24个航段。在无人直升机受到外界干扰偏离当前航线时,飞控机根据当前位置来判断目前直升机离当前激活飞行计划中的哪个航段最近。在具体设计中通过比较偏航距判断最近航段,同时只对偏航距在航段之内或在航段的顺向延长线位置的航段进行偏航距的比较。下面给出这两种最近航段判断方法。
(1)判断偏航距在航段之内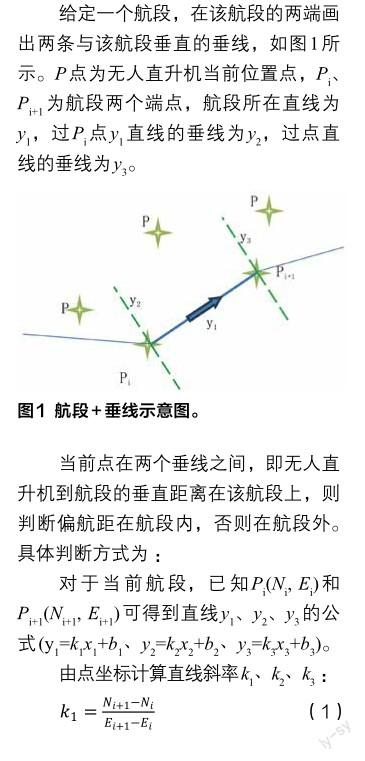
控制律设计原则
自动区域导航可引导无人直升机进行现有航线的跟踪飞行,该功能主要通过横滚轴和航向轴的控制实现[5]。俯仰通道并非该功能实现的决定性因素,因此在接通自动区域导航后,俯仰通道控制律设计为俯仰保持功能,保持接通瞬间俯仰姿态、速度等飞行状态。在倾斜通道设计中,将计算得到的横向驾驶信号作为倾斜通道的参考指令,通过控制律设计实现对横向驾驶信号的跟随。偏航通道设计依照协调转弯逻辑,保证滚转与偏航运动耦合影响最小,使得飞行侧滑加速度为零。由侧向加速度和滚转角信息计算得到偏航角给定值作为偏航通道的参考指令,再通过控制律实现对参考指令的跟踪。
自动区域导航接通流程
第一步:通过显示系统装订飞行计划(包括航路点和航段信息),并激活飞行计划;
第二步:当无人直升机偏离飞行计划航线时,飞控机根据直升机当前的即时位置来判断目前直升机距离最近的航段,发出离最近航段的从点、到点及下一点给组合导航系统,该航段将作为自动区域导航跟踪的目标航段;
第三步:组合导航系统根据接收到的从点、到点计算出偏航距和偏航角(直升机当前航向与当前航段的夹角,偏航角范围为0°~360°)和横向驾驶信号;
第四步:飞控机接受偏航距和偏航角和横向驾驶信号;
第五步:横向驾驶有效信号输出——组合导航系统根据偏航距和偏航角判断横向驾驶信号有效性,当满足偏航距在一定距离内,且当前航向和预定航向的夹角小于90°的条件时,认为横向驾驶信号有效,组合导航系统将输出至飞控机的横向驾驶信号指示有效;
第六步:在横向驾驶信号指示有效情况下,飞控自动区域导航触发,直升机进入自动区域导航状态;
第七步:若横向驾驶信号无效,飞控自动区域导航处于待触发状态,显示器页面提示接通条件不具备,自动区域导航处在预备位;
第八步:此时无人直升机朝现有航路点信息指引航段飞行,当偏航距达到一定距离内,且当前航向和预定航向的夹角小于90°时,将横向驾驶有效信号置为有效并发送给飞控机;
第九步:飞控自动区域导航触发,直升机进入自动区域导航状态;
第十步:进入自动区域导航状态后,通过控制律解算跟踪目标航段,实现自动沿航线飞行。
总结与展望
自动区域导航充分发挥直升机的横侧向的机动能力,可以减少外界干扰对飞行计划的影响,实现无需操作员干预的条件下自动驾驶无人直升机快速跟踪航线的目标,大大减小了操作员的负担。本文对自动区域导航功能的实现从航电系统设计、飞行控制律设计、实际使用中的接通流程几方面进行阐述,但在实际功能使用中仍然存在航段切入慢,航向摆动、控制精度低,航线非最优等问题。相信随着故障问题的解决和研究的深入,自动区域导航能够不断完善,成为无人直升机控制中一种安全可靠的自动飞行模态。
