14506 综掘工作面智能化改造技术研究
2023-03-07谷瑞
谷 瑞
(晋能控股煤业集团浙能麻家梁煤业有限公司,山西 朔州 036000)
1 概况
麻家梁煤业14506 巷道设计长度1300 m,布置在4 号煤层中,煤层厚度平均6.3 m,煤层厚度变化较小,煤层中一般含3~5 层夹矸,其单层夹矸厚度0.20~0.65 m,平均0.35 m,夹矸总厚度平均小于1.40 m。煤层倾角最大11°,平均6°,赋存较稳定。
14506 综掘工作面采用三一公司生产的EBZ200掘进机组,在矿用5G 无线通信系统基础上,对掘进机智能改造[1-3],具备自主导航、精准定位、坡度追踪、自动截割、智能控制、工况监测、故障诊断、环境监测、危险区域人员识别、一键启停等功能,实现复杂地质条件下的岩巷及半煤岩巷自动化掘进,从而在少人、甚至无人操作下,完成高效、安全的井下掘进作业,最终实现煤矿井下掘进工作的全智能化、无人化目标。
2 综掘工作面智能化改造
2.1 工作模式
(1)便携式视距遥控
掘进机操作司机携带轻便的掘进机遥控器,在掘进机附近利用人眼观察截割头位置和进尺,控制掘进机的各种操作功能[4]。本模式功能主要用于掘进机司机临时需要观察现场情况和紧急情况下的工作处理。
(2)基于视频图像的无线远程遥控
在此功能模式下,掘进机司机基于掘进面和掘进机机身安装的视频摄像头画面,获得截割头在截割剖面的位置,远程操作掘进机,控制截割头位置和进尺,进行掘进作业。
(3)基于激光定位的无线远程遥控
在此功能模式下,视频监控画面只是作为辅助参考位置,掘进机司机主要利于激光定位系统以及在远程遥控控制台上模拟显示的截割头相对截割面位置(如图1),远程操作掘进机,控制截割头位置和进尺,进行掘进作业。
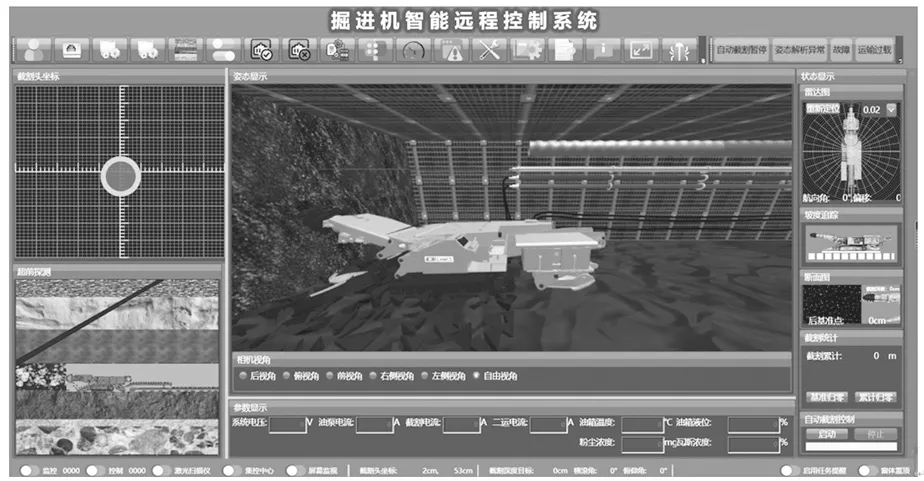
图1 基于激光定位的无线远程遥控
(4)基于激光定位的自动巷道断面成形
断面自动截割成形系统包括两个功能,即自动截割成形和自动刷帮,前者控制掘进机截割臂按照设定路径和步距自动完成断面截割,而后者可进一步提高两帮的截割控制精度以及修整断面形状。
在此功能模式下,每个截割循环开始时,掘进机自动进行位置校正,在设定起始位置点开始截割。同时,在截割过程中,根据机身位置偏移,自动对截割位置进行校正,最终自动完成截割成形和自动刷帮功能。
2.2 位姿监测系统
为了获取掘进机机身的绝对位姿参数,本系统采用激光扫描仪结合机身多传感器数据融合的悬臂式掘进机位姿检测方法。既充分利用激光扫描仪绝对位置校准,又利用了掘进机机身安装的多传感器实时数据,联合工作,解决了高清摄像头无法清晰观测截割头具体位置的缺陷。
(1)掘进机自身姿态
掘进机自身的姿态通过加装在掘进机油缸里的磁致位移传感器,通过升降、回转、铲板、后支撑油缸的位移变化值,从而读取出掘进机当前的实时机身状态,最终可以在上位机软件中通过掘进机三维动画,实时显示出掘进机的自身状态。
(2)掘进机绝对位置
掘进机机身绝对位置参数,如图2,由三个角度参数和两个距离参数构成,即“机身偏向角α”“机身俯仰角β”“机身横滚角γ”“机身偏向位移A”和“机身纵向位移B”。
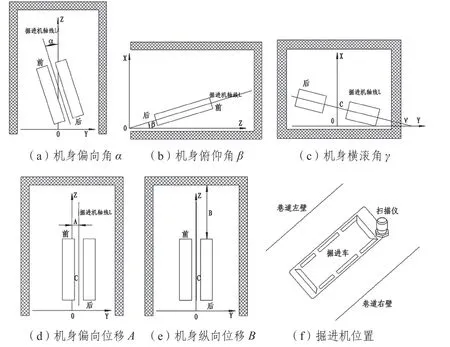
图2 绝对位置
2.3 可视化系统
视频监控[5]选用机载高清1080P 摄像仪,具有红外补光技术,保证截割工作时的成像质量。综掘机机身安装6 个摄像仪,牢固固定并安装防冲击防护罩(避免外物的拐碰及特殊条件下爆破的冲击);6 个摄像仪采取固定设计,减少摄像仪的人工挪移,方便缆线的保护。采用纳米玻璃减小摩擦系数,阻止污染物驻留,浇封设计提高抗震性能。掘进机上设减震装置,摄像仪采用电子减震技术,通过图像补充减小截割过程中摄像仪的振动。
2.4 人员防护系统
通过在掘进机的后方5 m 处(位置可调)安装红外对射传感器,在掘进机作业期间,一旦检测到有人员误入,立即触发急停,避免危险事故发生。
2.5 自动截割
通过采集多参数传感器数据以及位姿测量和位姿补偿的结果,通过数学建模,自动控制截割臂的回转和升降油缸,截割出符合煤矿掘进规程要求的规整断面。
2.6 数据采集与传输系统
掘进机安装信号转换器与巷道中间基站用无线信号连接,通过光纤连接环网将视频和重要参数信息传输至远程控制台和地面控制中心,实现重要数据的远程实时监控。
远端控制中心对设备的工作环境及自身情况进行监控展示,实时采集掘进机的电压、电流、油温等关键状态信息,当数据超过门限值时,发出声光报警。
2.7 软件系统
(1)主界面功能
与机车车载子系统器建立通信;显示综掘机工作参数;采集遥控控制状态;综掘机车位姿检测和补偿;自动截割工艺控制;自动扫帮工艺控制;车载控制器状态指示。
(2)综掘机参数配置
综掘机位姿检测需要预知车体结构参数和传感器安装位置,从而能够计算综掘机位姿参数并在截割过程中由于机身位姿变化进行自动补偿。
(3)位姿监测
主要功能:多角度显示综掘机姿态;各油缸位移实时显示;截割头动画实时显示位置;实时显示截割头路径坐标;综掘机各个动作模拟动画显示。
(4)自动截割
主要功能:根据截割断面尺寸和形状自动计算截割路径;实时显示本循环历史截割轨迹;实时显示当前截割头位置;显示截割头尺寸、截齿尺寸;自动扫帮。
(5)激光雷达图显示
主要功能:综掘机航向角、俯仰角、横滚角、左右帮距离实时显示;实时计算并拟合显示综掘机在巷道位置以及巷道中线;实时显示截割深度;实时统计截割深度;动画实时显示截割头进入煤壁深度;截割深度统计清零。
孕中期产筛指标中,AFP主要由胎儿肝脏分泌,可通过胎盘屏障和胎儿的膜屏障进入母体血清,在怀有开放性神经管缺陷患儿的孕母血清中AFP水平可比正常妊娠高出80%以上;而在怀有唐氏综合征患儿时,孕母血清中的AFP水平则比正常妊娠明显降低。free-βHCG在妊娠8~10周达高峰期,于18周左右下降至稳定水平,在怀有唐氏综合征患儿的孕母血清中其含量显著升高,在孕中期平均为正常妊娠的2倍。uE3是由胎儿肾上腺、肝脏和胎盘合成的一种雌激素,该指标水平随着孕周的增加而增加,可反映胎儿的生长发育状态。唐氏综合征妊娠时,uE3水平较正常妊娠低29%,可能与胎儿发育迟缓有关。
(6)故障报警
主要功能:实时显示当前报警参数;历史报警参数显示;报警查询;报警信息提示。
(7)维修提醒
主要功能:设置维修计划;维修计划周期提醒;维修信息提醒;剩余时间提醒。
(8)动作提示
主要功能:实时提示当前综掘机正在进行的控制动作;实时提示综掘机当前状态。
主要功能:实时显示左右星轮压力、一运压力、液压系统压力、截割电流等工作参数。
(10)智能化掘进机配备数字孪生仿真监控系统,并具备越界停机自动检测系统,当掘进机自动截割时,系统可以检测到掘进机周围区域人员情况,一旦检测到有人误入掘进机作业区域,立即停机报警。
(11)地面调度室配备一套地面集控中心,通过光缆与井下控制台连通,井下远程控制台和地面集控中心控制台要求整体化设计,要求内置系统软件,可以实现井下掘进机3D 效果仿真监控。
3 应用效果
14506 综掘工作面进行智能化改造后,综掘机能够实现自主导航、坡度追踪和自动截割,掘进设备能够实现单系统或单设备的远程自动控制,同时具备危险区域人员接近识别与报警功能,集控平台具备对巷道掘进设备进行远程操控的功能,能够实现一键启停及智能操控。
巷道掘进过程实现全机械化作业,掘进速度满足矿井采掘接替要求,掘进工作面生产班单班作业人数减为9 人。