泊车机器人在智能停车库中的应用研究
2023-03-06张书景马惊鸣康文茂吕红军
张书景 江 玮 马惊鸣 车 行 康文茂 吕红军
(北京德威佳业科技有限公司,北京 101300)
公开数据显示,截至2023年6月底,内地全国机动车保有量突破4.26亿辆,其中汽车3.28亿辆、新能源汽车1 620万辆[1]。因此,停车位难找、停车空间不足等一系列停车问题成为当前制约城市发展的主要因素之一。为减缓停车难带来的城市管理和交通压力,大型智能化停车场应运而生。一方面,停车场的智能化主要体现在机械智能方面,研究者们相继开发出九大类车库类型,分别是升降横移、简易升降、垂直循环、水平循环、多层循环、平面移动、巷道堆垛、垂直升降、圆形塔库。另一方面,停车场的智能化主要体现在泊车设备的智能方面。按照泊车设备行走时是否需要轨道辅助,可以分为有轨车库和无轨车库两大类[2]。无轨车库又称机器人停车库,车辆存取中的搬运动作需要由自动导引车(AGV)完成。AGV按照整个停车库中车位的实时空闲或占用情况,智能选择最优停泊的空车位,按照实时规划出的最佳路径,将车辆搬运到对应的车位中。可以看出,AGV智能停车库的智能化程度、技术复杂性和先进性相比传统有轨智能库高很多。
1 AGV泊车机器人
AGV是一种灵活性和智能性非常高的搬运车,本质上属于移动机器人范畴,现已在智能仓储物流、港口码头、生产加工车间等各类工业生产领域中得到了广泛应用。智能停车AGV雏形最早出现于2008年,日本东北大学研究团队设计出iCARTⅠ自动导引车系统[3]。该系统由两个独立的机器人组成,工作时位于汽车的左右两侧,通过4个升降杆对单侧前后轮胎进行支撑,同步协作完成对车辆的搬运。2011年,该团队在iCARTⅠ的基础上研制由4个独立的机器人协同工作的iCARTⅡ自动导引车。希腊塞萨斯德谟克里特大学研究人员于2015年研发出与iCARTⅡ类似的AVERT自动导引车。AVERT系统可以进行全方位运动,因此可以行驶到车辆下方对其进行搬运。iCART和AVERT都属于多机协作的自动导引车系统,对机器人之间的协同感知、规划和控制能力要求较高,因此工作安全系数较低。为了克服多机协作停车AGV系统的缺陷,一体式停车AGV应运而生。
我国智能停车AGV起步较晚,但近几年已经涌现出深圳怡丰和杭州海康机器人等多家优秀企业,研发水平也已走在世界同行业的前列[4]。深圳怡丰是国内最早成功研发出梳齿型和车台板型停车AGV的厂家,后续又研发出子母AGV和方舟AGV,在多个地区都有项目落地。杭州海康机器人公司依托海康威视多年来在图像处理、硬件设计、嵌入式软件、移动机器人和机器视觉等领域的技术积累,研发的泊车AGV在第三届互联网大会期间于乌镇试运行使用。
2 基于AGV的智能停车库系统
2.1 系统架构
基于AGV的智能停车库系统架构如图1所示。

图1 基于AGV的智能停车库系统架构
出入车厅:智能存取、检查车辆并校正停车位置。
停车AGV:代客泊车,实现人车分离。
车辆搬运设备:升降机用于车辆上下移动,中跑车用于车辆左右移动,搬运器使车辆出入泊位。
停车位/层:停泊车辆,判断车位是否被占用。手机停车App:预约存取车,在线支付。
2.2 工作流程
以平面移动车库和抱夹式AGV为例,用户在手机停车App中输入目的地,软件具备导航功能,能够快速规划出到达目的地附近停车场的最优路径。此外,用户还可以在App中输入车牌号码,提前预约目的停车场的车位。用户到达车库后,出入车厅门口的车牌识别系统能够识别并记录车辆的车牌号码。车辆进入出入车厅后,车厅中的各种检测设备会对车辆的外形尺寸进行检测,如果车辆的外形尺寸超出规定范围,车厅会进行报警、语音提示,车库中的显示屏会提醒车主驶离停车厅。车辆外形尺寸检测合格后,车厅配备的活体检测装置会检测车辆、车厅中是否有人员或动物滞留。上述检测合格后,车主便可使用出入车厅门口的客户端引导操作界面进行存车动作。车主确认存车后,车厅外部的快卷门就会关闭,车主便可自行离开。出入车厅还配有车辆对中装置,能够将待泊车辆校正到准确的位置,车主只需要将车辆停放到大概位置即可,能够提升泊车体验感。随后车厅内部快卷门打开,停车AGV通过抱夹车辆轮胎的方式将车辆抬起,并把车辆搬入升降机中,升降机载车上升到指定停车层,再由已经等在出入口的搬运器把车辆搬入中跑车上,中跑车载着搬运器以及待泊车辆进行水平移动并停在泊位前,搬运器把车辆送入泊位中,完成存车,取车则动作相反。客户在取车时除了可以使用车厅门口的客户端操作界面,还可以通过手机App预约取车,停车库可以在客户前往车库取车途中完成取车动作,使车辆在出入车厅中等待车主,缩短车主等待时间。
2.3 AGV关键技术
2.3.1 车辆交换技术
以车辆交换技术[5]划分,AGV包括车板式、梳齿式、夹持式。车辆交换技术对比如表1所示。
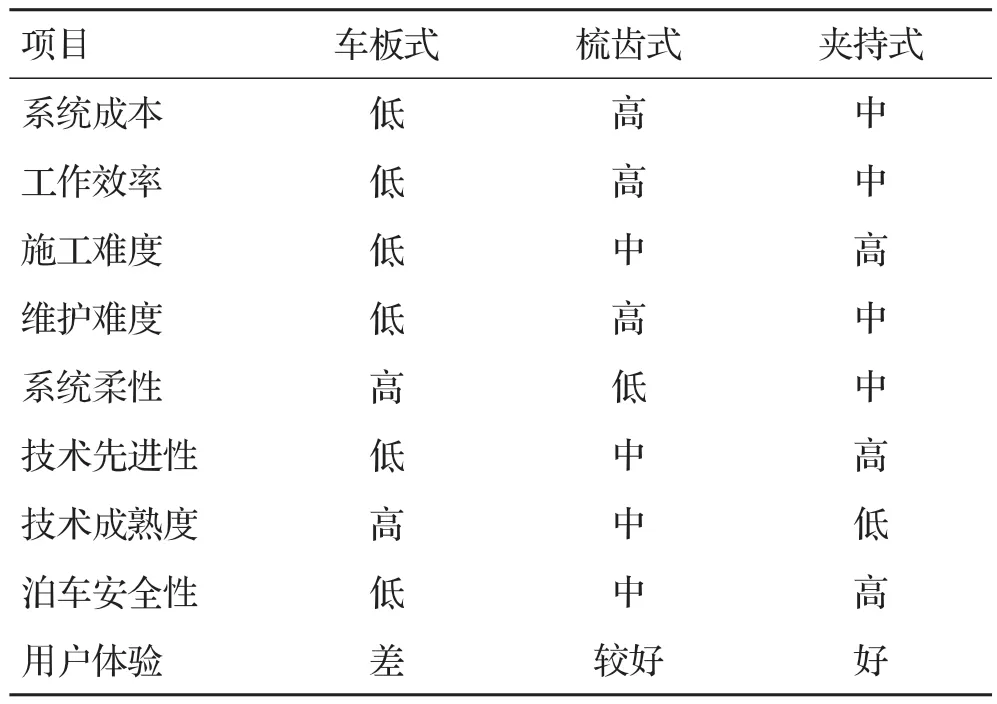
表1 车辆交换技术对比
车板式AGV可以直接行驶到载车板下面,利用自动导引车的车身顶升机构抬升停放有被搬运车辆的载车板,一起搬运到车库的停车位。
梳齿式AGV的自动导引车车身两侧分别有4组向外伸展的梳齿,被搬运车辆放置在固定位置的梳齿架上,利用梳齿的空间间隙和升降运动,就可以完成车辆的交换过程。
夹持式AGV利用自动导引车的车身夹持装置对车轮进行夹抱或支撑,完成对被搬运车辆的交换。
梳齿式和载车板式AGV都需要司机将被搬运车辆精准地开到梳齿架或载车板等外部机械平台上,因此对司机和外部机械平台依赖较高,增加了泊车的风险,影响用户体验。
2.3.2 导航定位技术
AGV导航技术大体可以分为两大类,固定路径导航和非固定路径导航[6]。固定路径导航是一种需要在AGV行走路径的地面上方或下方铺设金属线、磁带、磁钉、色带和二维码等光学标志,通过车载电磁传感器或光学识别设备会对AGV实际位置与预设路径间的偏移量进行检测,控制系统通过偏移量对AGV运动进行调整,使其能够沿着预设路径行走的导航方式。电磁感应导航、磁钉导航、磁带导航、色带导航和二维码导航就是典型的固定路径导航方式[7]。非固定路径导航是一种AGV在起始点和目的点之间可以自由行走的导航方式,需要AGV已知工作环境的地图及其地图中的位置信息。非固定路径导航的常见方式有GPS导航、UWB导航、激光导航、自然导航、视觉导航和惯性导航[8-9]。导航定位方式对比如表2所示。
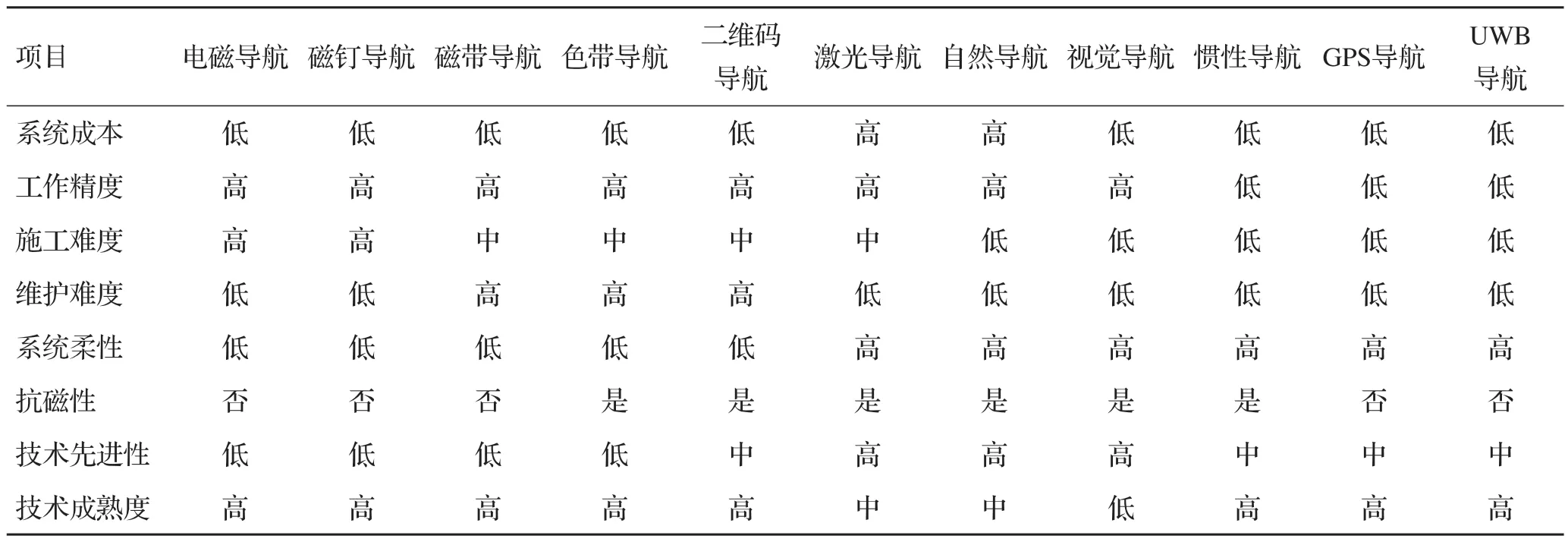
表2 导航定位技术对比
3 AGV智能停车库项目案例及应用优势
3.1 项目案例
中州宾馆智能停车楼规划总占地面积约为818.63 m2,建筑高度15.2 m,钢结构设计层数为地上6层。1~4层为SUV层,5~6层为轿车层,规划建设车位201个,有效车位195个,等候车位6个。项目设计定位为智能机器人平面移动停车库。
3.2 应用优势
降本+低耗:成本低于自走式车库,能耗低于机械车库与自走式车库。
低碳+海绵:单车位体积小,建造开挖面积小,节省钢筋混凝土等建筑材料,减少碳排放,同时开挖面积小,有利于海绵城市建设。
高效+便捷:AGV无人车实现代客泊车,连续存取车速度快(约90 s取一辆车),使用高峰期可适应潮汐效应,手机预约取车实现车等人。
5G+共享:实现停车共享、平台共享和数据共享,通过5G互联网+模式,不断丰富城市交通生态,为智慧城市、智慧交通提供数据支持。
AI+智慧:人工智能技术赋能,智能车牌识别,智能存取车,智能故障识别,手机在线支付。
4 结语
停车AGV具有高度的智能性和安全性,能够避免不确定和不准确的人类停车行为,可以高效地操作多辆车的停车过程。基于AGV的智能停车场在解决停车难问题方面优势显著,是未来智慧城市、智慧交通和智慧建筑发展的重要组成部分。
