多传感融合全景智能监控装置技术研究
2023-03-06吴有超秦晓敏艾庆华
韩 猛,吴有超,李 明,秦晓敏,艾庆华
(北京智芯半导体科技有限公司,北京 102299)
0 引 言
电网的安全运行除了依托各种监测设备外,更需要人工的巡检与运维。但人工巡检耗费大量人力、物力,巡检的时效性成为其安全运行的瓶颈。传统的视频监控装置可通过视频方式远程巡检,在一定程度上减轻了巡线人员的工作压力,但由于其功耗较高,采用太阳能时通常需配备大容量的电池,这又使其成本居高不下。而采用感应取电方式往往需要断电安装,操作复杂,大量视频传输也增加了传输成本,增加了视频查看人员的工作量,种种弊端又限制了其大规模推广[1]。
对于那些需监控的线路隐患点,急需采用一种新型运维管理模式,实时掌握设备情况,有效弥补传统运维管理模式的不足,提升对特殊情况下的线路监控及管理工作。通过省级输电线路智能管控平台的部署,结合先进智能监测设备、汇集状态信息进行输电线路设备运行状态评估,发现输电线路运行隐患并借助巡检系统及时进行信息交互及故障处理,是提高输电网安全稳定运行水平的切实需要,也是发展智能电网的需要。
多传感融合全景智能监控装置通过感应取电工作,采用多传感器数据融合技术,对图像、振动、角度、温度等数据进行采集,具备人工智能识别能力,并与监控主站交互,将数据上传到智能监测设备的智能运营管控平台,完成对输电线路状态的全面监控和故障预警。
多传感融合的智能监控系统一般由传感器、数据融合处理模块、数据传输与接收模块等组成[2]。智能监测终端硬件主机由摄像头主控板、传感板和电源板组成,天线置于主机内。装置的核心部件是摄像头主控板,负责图像拍摄、处理与传输、与上下级通信等,同时接收传感器板上传的多传感器数据。电源板采用感应取电+超级电容的方式为系统提供电源。传感器板采集各传感器的数据,通过串口将数据上传给摄像头主控板。硬件架构如图1所示。
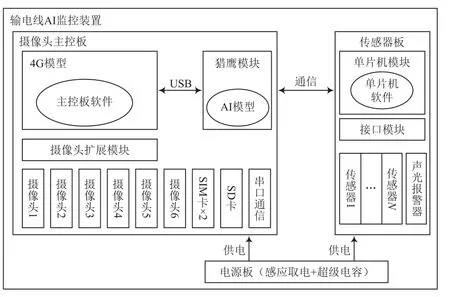
图1 装置硬件架构示意图
此项目涉及的关键技术有多传感器数据融合技术、图像识别技术、感应取电供电技术和装置的外壳设计技术等,以下逐一介绍。
1 多传感器数据融合技术
1.1 多传感器数据融合技术原理
传感器数据融合的定义可以概括为把分布在不同位置的多个同类或不同类传感器所提供的局部数据资源加以综合,采用计算机技术对其进行分析,消除多传感器信息之间可能存在的冗余和矛盾,加以互补,降低其不确实性,获得被测对象的一致性解释与描述,从而提高系统决策、规划、反应的快速性和正确性,使系统获得更充分的信息。其信息融合在不同信息层次上出现,包括数据层融合、特征层融合、决策层融合。
一般情况下,使用多传感融合的方式,即采用2种或多种技术手段共同进行检测,可达到优势互补、提升识别效率的目的[3]。
多传感器数据融合相比单一传感器信息有如下优点,即容错性、互补性、实时性、经济性更佳,所以逐步得到推广应用。应用领域除军事外,已适用于自动化技术、机器人、海洋监视、地震观测、建筑、空中交通管制、医学诊断、遥感技术等方面。
鉴于传感器技术的微型化、智能化程度提高,在信息获取基础上,多种功能进一步集成以致于融合,这是必然的趋势,多传感器数据融合技术也促进了传感器技术的发展。
1.2 多传感器数据融合技术的实现
1.2.1 此项技术的设计难点
(1)传感器种类多,本设备采集的参数有图像、导线温度、三轴加速度、环境温湿度等。由于传感器的原理和接口不尽相同,设计过程需要考虑各种传感器的差异。
(2)传感器数量多,本设备传感器的基本配置为视频传感器、导线测温传感器、温湿度传感器、加速度传感器等,由于结构空间有限,传感器布局也要配合算法等因素。因此,单位体积内传感器的密度较大,传感器各信号间易产生干扰。
(3)将众多传感器采集的数据进行整理、分析,根据物理意义和应用场景,分析判断环境状态,其多模态传感器算法需要设计和验证。
(4)电和磁可以通过电路和磁路对系统产生干扰,输电线路的工作环境比较恶劣,电场和磁场的变化在系统有关电路或导线中感应出干扰电压,从而影响系统正常工作。
这就需要从软件和硬件两个方面进行抗干扰设计。软件方面可以采用指令冗余、拦截技术、软件“看门狗”技术、系统故障处理、自恢复程序设计、数字滤波、RAM数据保护与纠错等技术;硬件方面,可以采用抑制干扰源、切断干扰传播路径、提高敏感器件的抗干扰性能等方法。细致周到地分析干扰源,将硬件与软件抗干扰相结合,完善系统监控程序,设计稳定可靠的系统。
1.2.2 主要传感器的选型和设计要点
(1)图像传感器
图像传感器(摄像头)需要采用星光级高清摄像头,从而实现白天和夜间24小时拍摄的功能。摄像头的接口需采用MIPI接口。
(2)加速度传感器
加速度传感器需要采用小型化三轴加速度传感器。由于加速度传感器在静止放置时受到重力作用,因此会有1g的重力加速度。利用该性质,通过测量重力加速度在X/Y轴上的分量,可以计算出在垂直平面上的倾斜角度。应用加速度传感器可以测量振动加速度,对加速度积分一次可得速率,对速率积分一次可得位移,因此可以测量出振动的频率和幅度。
(3)温湿度传感器
温湿度传感器选型要点:测量范围、响应时间、体积小型化。
(4)导线温度传感器
导线温度传感器选型要点:测量范围、响应时间,及结构上需要有可以紧固的装置。对结构上的设计需求是由于传感器的探头需要与被测温导线紧密接触,以便准确测温。
1.2.3 多传感器数据融合算法
信息融合过程中,初始融合算法在近似过程中继承扩展卡尔曼滤波算法的1阶和2阶截断误差,对目标的局部估计产生较大影响,这个问题可以通过Sigma点滤波器或离散差分滤波器来解决[4]。在多传感器数据融合过程中运用主元分析法分析状态监测结果。采用主元分析技术,在输电线路状态监测应用的基础上,获取各类设备的实时运行信息,选择若干个输电线路设备参数,例如高压侧温度、导线拉力、低压侧温度、铁塔杆件应力、接地电阻和绝缘子风偏等,构建数据分析模型,在本地及时判断输电线路的运行状态,有效提高输电线路状态监测系统的可靠性、实时性与稳定性,保证输电线路运行安全可靠[5]。
2 图像识别技术
2.1 图像识别技术的原理
图像识别技术是人工智能的重要领域。它指对图像进行对象识别,以识别各种不同模式的目标和对象的技术。
图像识别基本过程如图2所示。

图2 图像识别基本过程示意
信息的获取:通过传感器将光或声音等信息转化为电信息;
预处理:包括A/D转换、二值化、图象平滑、变换、增强、恢复、滤波等;
特征抽取和选择:在模式识别中,需要进行特征的抽取和选择,例如,一幅64×64的图象可以得到4 096个数据,测量空间的原始数据通过变换获得在特征空间最能反映分类本质的特征,这就是特征提取和选择的过程;
分类器设计:分类器设计的主要功能是通过训练确定判决规则;
分类决策:在特征空间中对被识别对象进行分类。
2.2 图像识别技术的实现
摄像头主控板负责图像的拍摄、处理和上传。摄像头主控板由可供二次开发的4G模块、猎鹰模块和摄像头扩展模块及外设组成。
可供二次开发的4G模块负责整个系统的运行,包括拍摄照片、与AI猎鹰模块交互、上传图片、接收指令等。
主流4G模块一般只能有两到三路摄像头接口,由于本项目需要6个摄像头,因此需要增加摄像头扩展模块以满足需要。
猎鹰模块负责处理图片,它采用了面向张量计算的达芬奇架构,通过独创的16×16×16的3D Cube设计,每个时钟周期可以进行4 096个16位半精度浮点MAC运算,以嵌入式功耗实现GPU服务器级别计算性能,为人工智能提供强大的算力支持,使前端具备边缘计算能力,可自动识别塔吊、吊车、挖掘机等线路通道隐患及销钉缺失、绝缘子爆串等杆塔本体缺陷并回传告警图片。当4G智能模组拍摄完照片并且传送之后,进行照片分析,通过智能识别,将图片标记后返回给4G模块。猎鹰模块作为协处理器NPU进行AI加速,与主处理器通过USB 3.0接口通信,双处理器的配合使得高性能与低功耗达到均衡,提升了处理速度也降低了电池的负担。因此能够更好控制整机成本。
图像识别流程如图3所示。

图3 图像识别流程
图像识别流程:定时抓拍识别过程由主拍照程序、主板图像识别程序、图像识别服务程序3个应用软件协作完成。首先由主拍照程序启动定时抓拍,判断当前计时是否大于等于(抓拍间隔-1) min,是则退出循环并给猎鹰AI芯片上电,否则继续判断到是为止。再判断当前计时是否大于等于抓拍间隔,是则退出循环并拍照后发送图片广播,否则继续判断到是为止。然后由主板图像识别程序转发图片给图像识别服务程序,调用HiAI Engine封装加载识别模型进行图片识别,由主板图像识别程序返回识别结果,在非整点拍照的情况下若识别结果有告警信息则上传该识别图片至后台,否则不上传,若在整点拍照的情况下无论有无告警信息都上传图片至后台,至此该次定时拍照流程结束。
图像识别的准确率测试是根据单位标准测试集进行判定。图像识别的测试结果见表1所列。

表1 对几种故障/隐患类型识别的准确率
3 感应取电供电技术
3.1 感应取电供电原理
CT型取电也被称为电流型取电。它利用电磁感应原理,正常情况下接地的地线上有电磁感应电流,地线相当于一个匝数为1的线圈,在架空地线上套一个可开合式缠有取能线圈的铁芯,当地线上有变化的交流电通过时,在取能线圈上就会有感应电动势产生,如取能线圈接通形成回路,则取能线圈上就会有电流流过,将此感应电动势进行处理,就可为在线监测设备提供电压[6],如图4所示。

图4 感应取电原理
3.2 感应取电供电的实现
感应电源主要由互感器和电源板两部分组成,原理框图如图5所示。

图5 感应电源原理框图
3.2.1 电源板设计
交流电压和电流通过双向可控硅调整后进入整流滤波电路,该模块主要起到整流交流电压、滤除有害波、稳定电压值的作用[7]。电源板原理如图6所示。
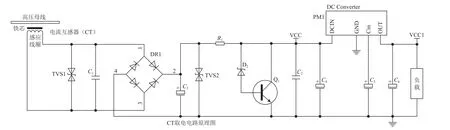
图6 CT取电电源板原理
瞬态抑制二极管TVS的选型要注意以下几点:
(1)其反向变位电压即工作电压(VRWM)要大于或等于待保护电路电压,否则TVS将吸收大量的漏电流而处于雪崩击穿状态,从而影响电路工作;
(2)TVS的最大钳位电压(VC)应低于被保护电路所允许的最大承受电压;
(3)TVS由于其反向漏电流随温度的增加而增大,功耗随TVS结温增加而下降,故在选用TVS时应考虑温度变化对其特性的影响。
由于母线电流变化范围较大,因此整流后的电压也有较大的变化范围,这就需要DC-DC(DC Converter)具有宽输入电压功能,使输出的直流电压稳定。
电源板的输出电压为12 VDC;输出功率要求当CT环通过50 A电流时,输出功率不小于5 W;符合EMC测试要求。
3.2.2 互感器设计
(1)电流互感器结构和材质
电流互感器整体采用开合钳式结构设计,磁芯采用硅钢片材质,外表采用抗腐蚀工艺处理。
(2)取电线圈匝数设计
电流感应取电模块二次侧绕组匝数确定原则如下:
(a)当二次侧输出最大功率等于节点工作所需最小功率时,可求满足节点工作要求的一次侧绕组电流幅值最小值;
(b)当一次侧绕组电流幅值为满足节点工作要求的最小值时,二次侧绕组感应电动势幅值最大值应高于系统节点设定最小值,可求二次侧绕组的最小匝数;
(c)当一次侧绕组电流幅值为满足节点工作要求最小值时,二次侧绕组电流幅值应高于设定最小值,可求二次侧绕组最大匝数[8]。
4 装置的外壳设计技术
4.1 装置外壳设计关键点
结构方面的设计难点主要有以下几个方面:
(1)本终端需要安装固定在输电线上,并通过感应取电,因此对外形结构有一定限制;
(2)由于终端安装在输电线上不能给输电线带来较大负担,因此整机重量有限制;
(3)各传感器的分布需要根据多传感器融合算法进行布局和安装;
(4)内部天线的位置要兼具功能性和抗干扰性;
(5)终端内部空间有限,因此,对终端内部电路板的布局、外形尺寸和装配方式需要较精巧的设计;
(6)整机常年工作在户外,环境恶劣,防护等级要求较高,需要IP65设计,这就需要进行防水、防尘处理。
4.2 装置外壳设计的实现
需要针对以上难点进行针对性设计,可采用以下方式:
(1)一体机,整个设备采用开合式设计,利用铰链把两部分连接到一起,当闭合时另一侧利用卡扣闭合在一起,利用螺丝固定;
(2)与电线直接接触的地方采用活动式塑胶卡槽环,可根据线径尺寸的不同更换使用;
(3)整机满足防护等级IP65的要求;
(4)避免闪络、起晕的设计,外壳表面平滑、确定防晕结构参数和选用良好的防晕材料;
(5)防盐雾设计,结构零件采用防锈防腐蚀材料;
(6)整体采用金属外壳,天线部分开窗。
依据设计需求及硬件设计架构,结构总体设计和整体外观效果如图7和图8所示。
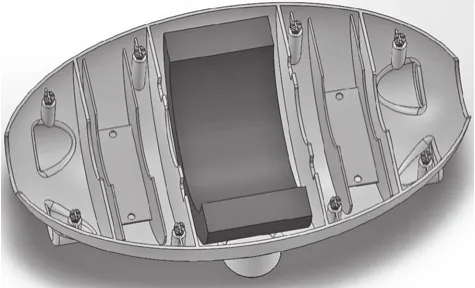
图7 内部结构
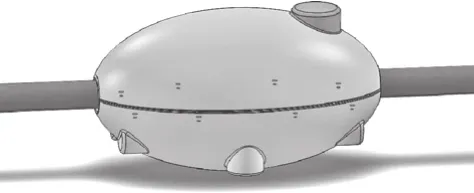
图8 外观效果
5 结 语
本文以多传感融合全景智能监控装置技术研究项目为基础,分别从多传感器数据融合技术、图像识别技术、感应取电供电技术、装置外壳设计技术等方面介绍了各自的研究成果。结论如下:
(1)应用多传感器数据融合技术,将6个摄像头的图像融合,得到近360°的图像信息,再与环境的温湿度、风速、风向、导线的振动情况等数据融合,从而对输电线路的状态进行更为全面的评估[9]。
(2)应用图像识别技术,使本装置具备了边缘计算能力,可自动识别塔吊、吊车、挖掘机等线路通道隐患及销钉缺失、绝缘子爆串等杆塔本体缺陷,并根据单位标准测试集进行测试,判断准确率可以满足实际需要[10]。
(3)采用感应取电供电技术,使装置可以24小时实时工作,解决了太阳能板+蓄电池方案中户外环境下电池寿命不稳定,需要定期更换,太阳能电池板需要定期清洁擦拭,电池体积大,重量大等问题。
(4)装置的外壳设计技术中,针对关键点进行有效设计,使装置可以适应严酷的自然环境且安装简便快捷。
