基于虚拟样机的某摩托车操纵稳定性分析
2023-03-06李金波余大江刘兴君
李金波 余大江 刘兴君
(重庆交通大学机电与车辆工程学院,重庆 400074)
0 引言
摩托车作为高速机动车辆,一直是以操纵稳定性、行驶平顺性、振动舒适性等作为研究重点[1]。使用多体动力学软件VI-Motorcycle研究大排量摩托车的操纵稳定性,可以缩短产品的开发周期,降低研发费用,对我国摩托车的生产发展具有重要意义。
国内外学者已对摩托车行驶时的操纵稳定性进行了大量研究,并取得了不少成果。
Whipple[2]开创性地对自行车的行驶稳定性进行了研究,为两轮车辆的运动研究奠定了基础。
Renzo等人采用多体动力学软件ADAMS建立车辆机械模型,完成车辆的“8”字形行驶试验和“J”形转弯试验[3]。
新的本田CBR1000RR[4]车型采用大活塞悬架技术,这使整个减振过程更加顺畅,在紧急制动下,车手在前端感觉更稳定。
黄泽好[5]利用多体动力学软件建立了精确的摩托车刚柔耦合系统模型,并且通过优化前后悬架刚度从而提高摩托车的行驶平顺特性。
徐中明等人[6]利用BikeSim建立摩托车参数化模型,联合Isight和Matlab对前后悬架系统的刚度和阻尼进行优化,获得了Pareto最优解集。
本文通过三维数模测得某摩托车的重要结构参数,利用VI-Motorcycle建立了摩托车多体动力学模型,并对摩托车高速行驶过程中受到脉冲干扰和稳态转弯时的操纵稳定性进行仿真分析,通过仿真试验数据对其高速直线行驶时的安全性能和低速转弯时的转向性能做出合理评价,对摩托车行驶时的动态特性研究具有一定的工程意义。
1 整车模型建立
摩托车整车模型是建模最重要的部分之一,模型数据来源于某国产大排量摩托车,整车主要结构参数与三维模型分别如表1和图1所示。
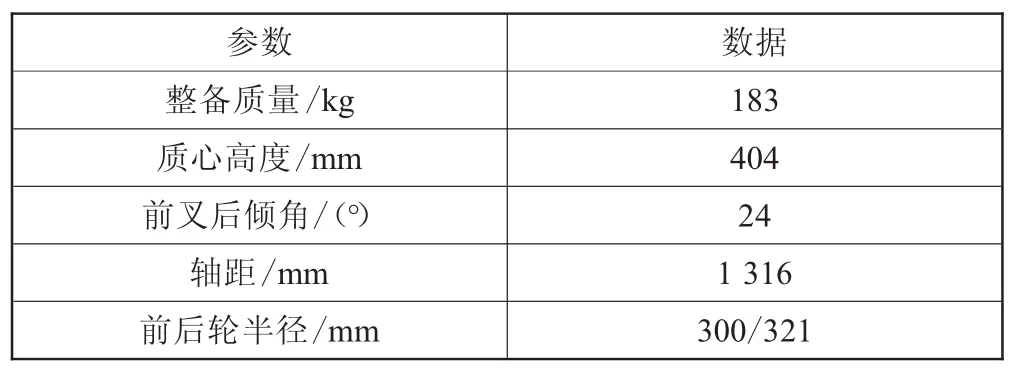
表1 整车主要结构参数
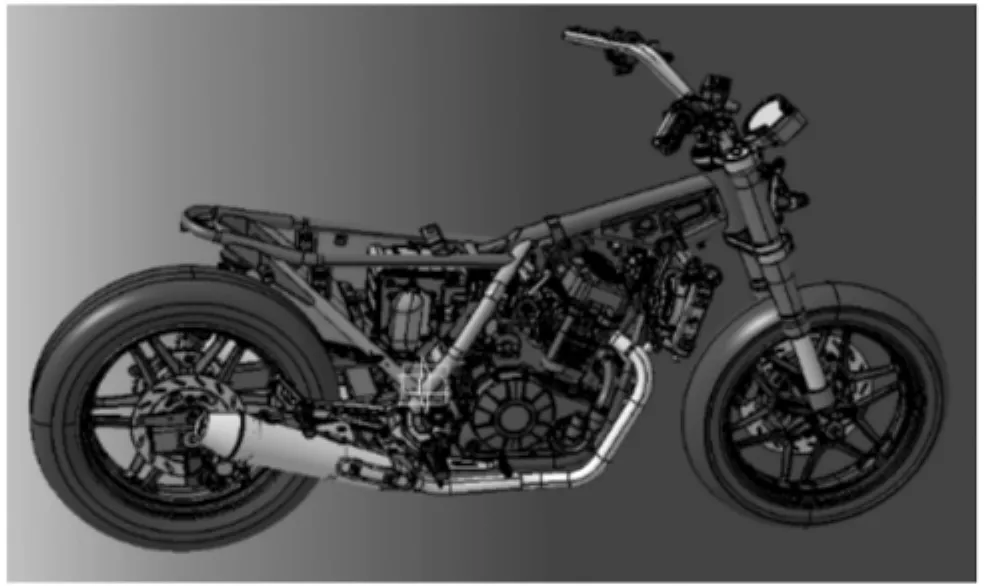
图1 摩托车三维模型
1.1 前悬架系统模型
摩托车的前悬架系统模型是整车模型最重要的系统模型之一,其结构形式的不同会导致动力学性能的不同。本文前悬架由上下前叉组成,其部分结构参数如表2所示,输入相应的模型参数,完成如图2所示的前悬架系统模型。
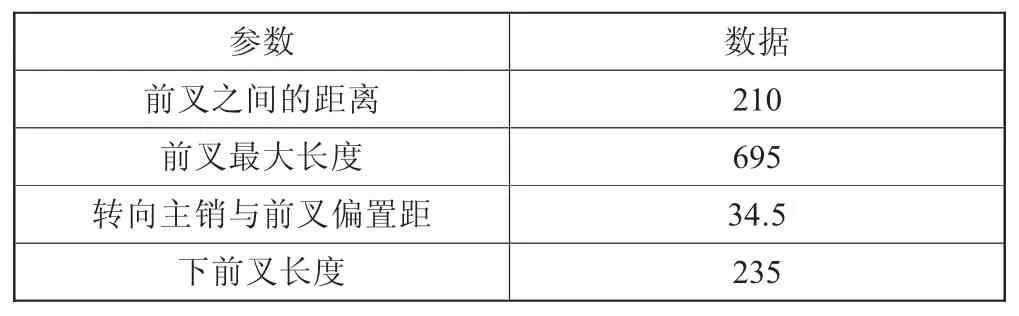
表2 前悬架部分参数 单位:mm
图2 前悬架系统模型
1.2 后悬架系统模型
摩托车的后悬架系统模型对整车模型而言也相当重要,摩托车在行驶过程中,后悬架系统直接影响车辆的乘坐舒适性。本文采用摇臂式双减震器后悬架系统,其部分结构参数如表3所示,针对现有的模型参数,建立的后悬架系统模型如图3所示。
图3 后悬架系统模型
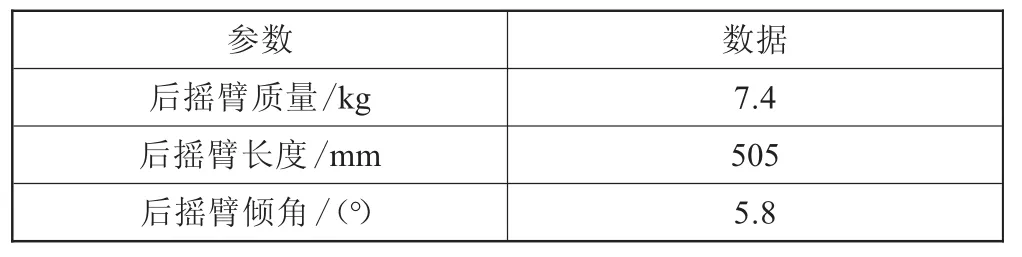
表3 后悬架部分结构参数
2 仿真试验
2.1 脉冲仿真分析
本文通过建立的模型对车辆进行脉冲仿真试验,即车辆以120 km/h的初速度在道路上直线行驶,8 s时在车辆手柄施加一个最大为10 N·m的转向力矩,其输入信号如图4所示,持续时间为0.1 s,20 s后仿真结束。
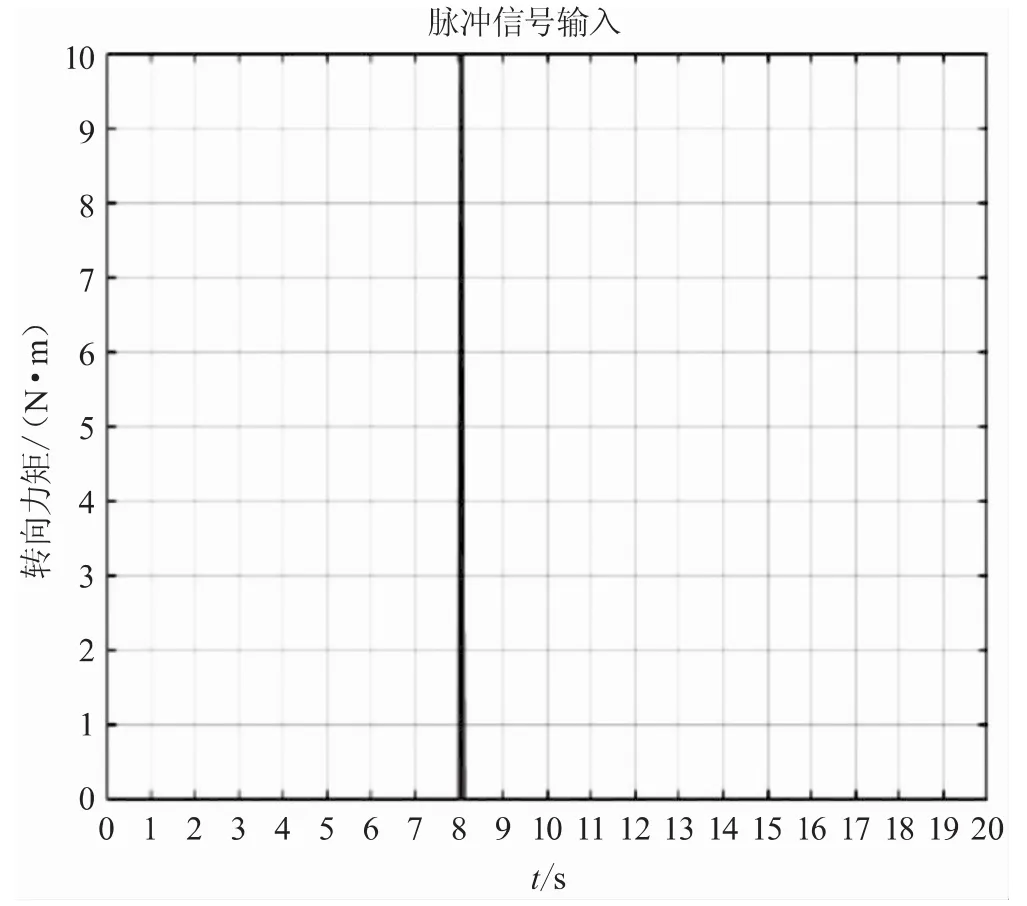
图4 脉冲输入信号
完成仿真后,可从图5仿真过程中看出该摩托车在高速直线行驶时的受力情况。
图5 仿真过程
图6为该摩托车操纵稳定性相关性能指标参数的关系曲线。图6(a)、图6(b)分别为横向加速度和横摆角速度与时间关系曲线,可看出在施加脉冲信号后,车辆横向加速度和横摆角速度上下急剧波动,4 s后车辆行驶趋于平稳状态;图6(c)、图6(d)为驾驶员所需的转向角和转向力矩与时间的关系曲线,可看出在施加脉冲信号后,为了控制车辆平稳,驾驶员所需转向角与转向力矩也呈现波动状态,4 s后车辆行驶趋于平稳行驶状态。
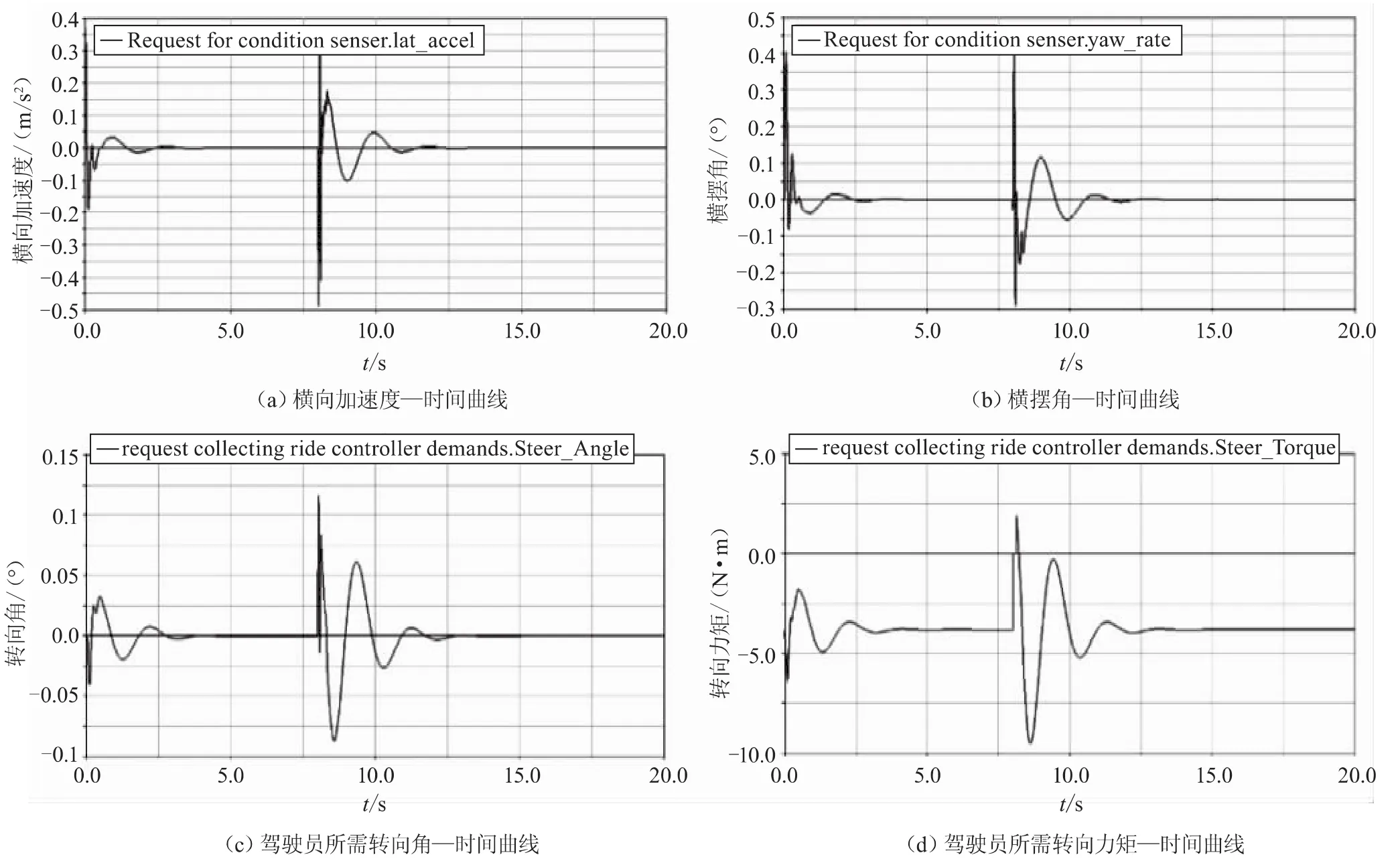
图6 高速直线仿真结果
由图6可知,虽然车辆需要经过4 s才能趋于平稳行驶状态,但由于车辆在受到10 N·m的瞬态力矩时,横向加速度、横摆角速度、驾驶员所需转向角以及驾驶员所需转向力矩幅值较小,由此判定该车型在高速直线行驶中受到脉冲干扰时稳定性较好。
2.2 稳态转向分析
稳态转向试验已被证明是评估摩托车和其他两轮车低频和非瞬态操纵性能的有效和定量方法[7]。描述驾驶员控制动作的量是转向扭矩和驾驶员侧倾角,在大多数情况下,驾驶员控制主要由转向扭矩组成,而倾斜角度和车身横向位移可被视为辅助控制输入。
本文通过建立的整车模型与半径为20 m的圆形道路进行稳态转向仿真试验,在该试验中,摩托车沿圆形道路等速行驶,如图7所示。
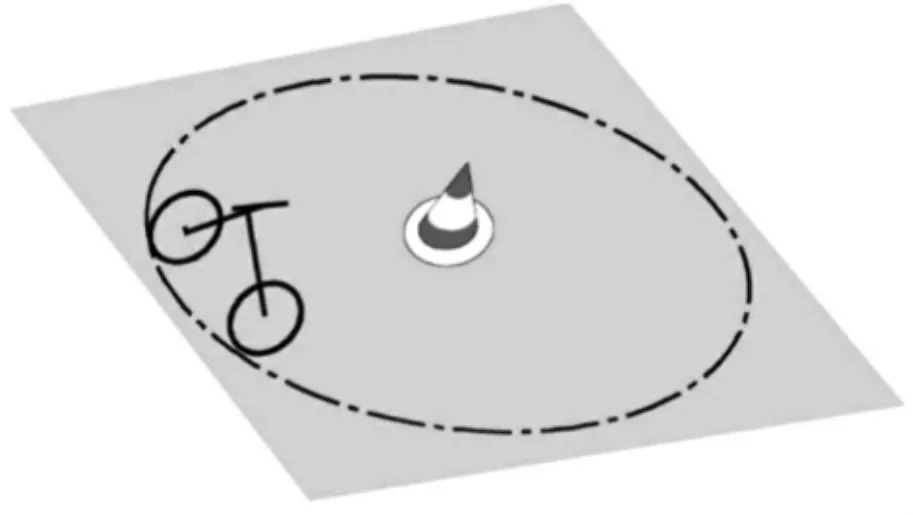
图7 稳态转向试验
扭矩传感器记录下驾驶员作用在摩托车方向把上的转向扭矩、摩托车侧倾角和横向加速度。摩托车的转向性能用侧倾指数k和加速度指数ka来衡量[7]。
侧倾指数k表示车辆转向扭矩与侧倾角之间的比率,即:
式中:τ为转向扭矩;φ为车辆侧倾角。
加速度指数ka表示车辆转向扭矩与横向加速度之比,即:
式中:v为摩托车车速;R为圆形跑道半径;g为重力加速度。
侧倾指数或侧向加速度指数越小,表明车辆完成等速圆周行驶所需转向扭矩越小,该车型转向比较灵活,转向性能优异[8-9]。
稳态转向的仿真试验结果如图8所示,车速v=30km/h,转向扭矩τ=-0.4 N·m,侧倾角φ=22°≈0.384 rad。
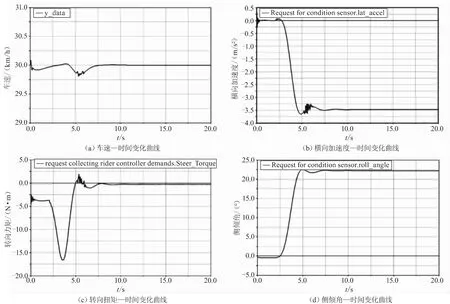
图8 稳态转向仿真试验
侧倾指数大小:
加速度指数大小:
仿真试验结果表明,该车型侧倾指数和加速度指数较小,在低速行驶时转向性能较好。
3 结论
(1)本文基于摩托车的结构参数,利用多体动力学软件VI-motorcycle建立整车模型,根据驾驶员和道路对摩托车操纵稳定性的影响,建立驾驶员与道路模型。
(2)对摩托车高速直线行驶受到脉冲激励的情况进行分析,该车辆的横向加速度、横摆角速度、驾驶员所需转向角以及驾驶员所需转向力矩幅值较小,由此判定该车型在高速直线行驶中受到脉冲干扰时的稳定性较好。
(3)对摩托车稳态转向的动力学模型进行分析,该车辆侧倾指数k=1.042N·m/rad,侧向加速度指数ka=0.11N/s2,表明在低速行驶时该车转向灵活,转向性能优异。