基于SVPWM的电机控制研究与实现
2023-03-03王臻成瀚桂林
王 臻 成 瀚 桂 林
(公牛集团股份有限公司 慈溪 315314)
引言
电机作为吹风机、电风扇、洗衣机的核心部件,与我们的日常生活息息相关,在已经适应了它们的今天,若是离开了这些将对我们的生活带来诸多不便。正如蒸汽机逐渐过渡到了内燃机,新的技术是促进产品更替的最强推动力。我们也随着观念的转变、技术的发展,渐渐地认识到电机要做到的不仅仅是转动,还应注重它的能效和性能。
而与我们生活联系最紧密,最容易使大家构成联系的是直流电机,因此这里我们将以直流电机作着重讲解。
那么就让我们来先认识下电机,以及什么才是好的电机,我们又该如何去做出好的电机。
1 电机控制理论
电机是以电流通过线圈产生磁场,从而与电机上的磁体作用达到转动目的的电动装置。但是若电流时钟保持一个方向,那么当线圈磁场与磁体产生的磁场达到平衡时转动就会停止。若要转动维持就需要使电流换相,因此就产生了两种做法,使用碳刷进行机械换相的有刷电机或使用功率开关器件进行软件换相的无刷电机。需要注意的是电流产生的磁场与磁体产生的磁场不能存在稳态,否则从静止开始时将不能打破这个平衡,后面的讨论都将会基于该条件。
1.1 SVPWM的优势
有刷电机结构简单、成本低廉、运行稳定,但因为有碳刷的存在,噪声大、寿命短、运行欠平稳,不过因为其成本的优势市场占有率最高;
无刷电机结构复杂、成本高、软件实现复杂,不过好处也非常明显,因为没有了机械换相,噪声小、使用寿命非常长、运行非常稳定,是逐渐主流的电机类型。
无刷电机因为是软件设计的方案,相对有刷电机种类就有很多。有实现相对简单、电压利用率较低、运行稳定性一般的方波控制电机;实现稍复杂、电压利用率较低、运行相对稳定的斩波控制电机;实现复杂、电压利用率高、运行稳定的SPWM控制电机;实现非常复杂、电压利用率很高、运行稳定的SVPWM控制电机。
方波及斩波的方式因为控制方式较简单在成本限制严格的散热风机中应用较广泛,不过因为存在电压利用率较低的问题这里不作展开。
SPWM的方式采用正弦波与高频三角载波比较的方式获得所需的占空比控制,从而获得接近正弦的控制波形,以提供稳定的电机控制,现在空调内机安静的一大原因就是得益于它的广泛应用。
SVPWM的方式采用电压矢量控制,通过调制三相交流电,从而产生一个沿特定方向等力矩的磁场控制方式。该方式可以非常切合正弦波形,电压利用率也会较SPWM高出15 %,在筋膜枪、新型吹风机、无人机、变频洗衣机、电动车上均有较好的应用,也因为是矢量控制可以做到对固有磁场的弱化,从而可以对电机的转速性能进行优化。
很显然SVPWM方式具有更高的电压利用率,也有更好的应用场景,因此掌握它就有了现实的意义,那么就让我们一起来揭开它的神秘面纱吧。
1.2 SVPWM的实现模型
SVPWM是对六个功率开关器件进行组合控制从而产生三相电,并使其开关特性呈现特定的调制波,最终让输出电流波形尽可能地接近于理想的正弦波形。其本质是直流电向交流电的逆变过程,是电压矢量平均值等效方法,控制逻辑如图1所示。
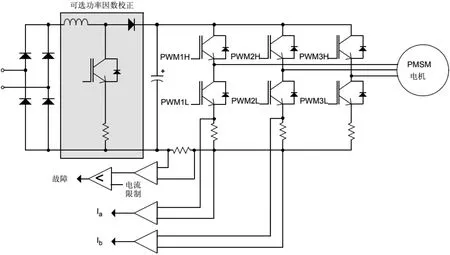
图1 SVPWM控制电路
图1中接入的是交流电,经整流后转为馒头波,然后通过功率管用于功率因数校正(PFC,Power Factor Correction),获得电压值为Udc且可以稳定提供电流的CCM模式直流电,接入到我们需要重点讲述的PMSM电机驱动电路。
1.3 SVPWM的矢量特性
这里设三相输出的电压分别是UA、UB、UC,PWM1产生的是UA接入电机的U相,PWM2产生的是UB接入电机的V相,PWM3产生的是UC接入电机的W相。需要注意的是每对PWM的上下臂是不能同时打开,并且因为电机的特性三相的电角度分别相差120 °。
根据上述桥臂的开关特性及电角度的关系,我们将每对PWM的状态进行定义。假定上桥臂导通的状态为1,下桥臂导通的状态为0,那么UVW三相对应的状态就有23种,对应为 000、001、010、011、100、101、110、111,其中000和111是没有回路的,因此对应的电压矢量特性就有6种,将其对应到电压空间中可以展现为如图2所示的图形。
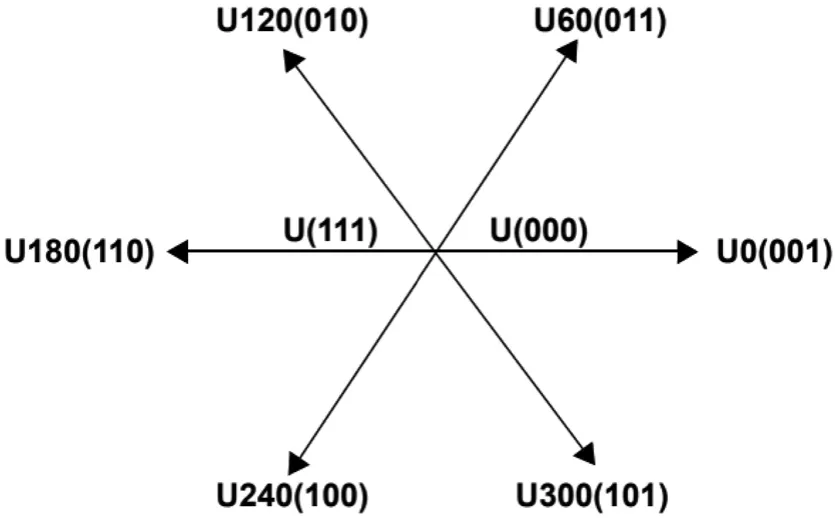
图2 三相空间矢量调制转化
如图2,U0(001)表示U相打开的是上臂、V相打开的是下臂、W相打开的是下臂,此时我们定义该相电压的矢量角度为0 °,而此时也正是0 °下的相电压的最优输出,电压值为Udc;U120(010)表示U相打开的是下臂、V相打开的是上臂、W相打开的是下臂,根据刚才0 °矢量的定义,此时为矢量120 °下的最优电压输出,电压值为Udc;U240(001)表示U相打开的是下臂、V相打开的是下臂、W相打开的是上臂,此时为矢量240 °下的最优电压输出,电压值为Udc;同时它们相对侧的反向最优矢量关系也就定义了出来,为U60(011)表示U相打开的是上臂、V相打开的是上臂、W相打开的是下臂,此时为矢量60 °下的最优电压输出,电压值为Udc;U180(110)表示U相打开的是下臂、V相打开的是上臂、W相打开的是上臂,此时为矢量180 °下的最优电压输出,电压值为Udc;U300(101)表示U相打开的是上臂、V相打开的是下臂、W相打开的是上臂,此时为矢量300 °下的最优电压输出,电压值为Udc。更直观的内容详见表1。

表1 桥臂开关状态与线电压及电角度的关系
由以上可知,六种情况均代表该矢量方向的最大值,而它们之间的状态都是需要组合产生的。例如此时需要一个矢量30 °方向的最大相电压,为了达到该效果,就需要有0 °与120 °相作用来产生,不过0 °与120 °矢量间存在反向的作用,因此30 °方向无法产生最大值为Udc的电压,能够达到的仅是六个顶点相互连接的六边形部分。同时为了使转动力矩平衡、避免抖动,就需要将输出电压维持在一个定制,即控制电压Uout的最大值需为该六边形的内切圆半径,具体如图3所示。

图3 电压空间矢量分析图
1.4 SVPWM的控制理论
控制最终的目的是实现电压空间矢量内任意角度的控制,根据图3绘制的电压空间矢量图我们可以知道,除刚才的六项电压矢量,其他的任意电压矢量可以分解为其相邻的两项电压矢量的组合。因此我们可以根据伏秒平衡原则来合成任意角度的电压矢量,即:
式中:
Uref—目标电压矢量;
Ux—角度小于目标电压矢量的相邻电压矢量;
Uy—角度大于目标电压矢量的相邻电压矢量;
Uz—零电压矢量;
T—采样周期;
Tx—Ux电压矢量在周期T内作用的时间;
Ty—Uy电压矢量在周期T内作用的时间;
Tz—零电压矢量在周期T内作用的时间。
若将时间进行具体化,则公式(1)等效为:
电机在工作时是一直做转动运动的,我们这里假设当前的转动是匀速的,频率为f,则当前的角速度ω=2πf,旋转电角度一周所需的时间Tc=1/f,那么与采样周期T相比,就可获得转动一周期所需进行Uref计算的次数为 =Tc/T,同时可以得到每次电角度增加的度数为:
式中:
θ—采样周期T,电机转子转过的电角度;
π—圆周率;
Tc—电机转子转过电角度360 °所需的时间;
n—电机转子转过电角度360 °会经历多少个采样周期T。
现在假设需要给出的电压矢量如图4所示,U0与上面保持统一设为电角度0 °,则图中所示需计算的Uout电角度为U0与Uout的夹角θ,处于扇区Ⅰ,此处它相邻的两个电压矢量即为U0(001)和U60(011),此处Uout我们使用统一要计算的值Uref表示,则此时的Uref需要通过U0(001)、U60(011)和零电压矢量组合得到。这里我们使用Tx和Ty作相邻象限的统一标识替代图中扇区Ⅰ的T1和T2,即假定U0(001)持续的时间为Tx,U0(011)持续的时间为Ty,可获得Uref的获取公式为:
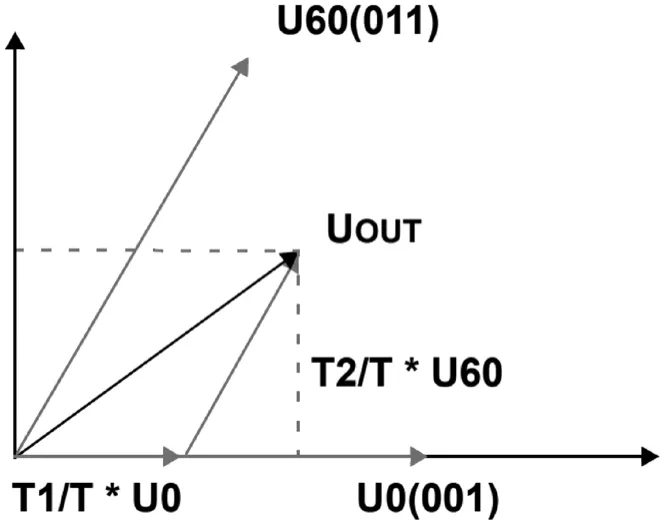
图4 目标电压矢量的拆解分析
式中:
Uref—目标电压矢量;
T—采样周期;
Tx—Ux电压矢量在周期T内作用的时间;
Ty—Uy电压矢量在周期T内作用的时间;
U0—图4中U0(001)方向上的电压矢量;
U60—图4中U60(011)方向上的电压矢量。
对公式(4)进行转化,等效为:
公式(5)与公式(2)中零矢量持续时间为0的情况是相同的,其中U0为公式(2)中的Ux,U60为公式(2)中的Uy。
此时我们需要对Uref进行坐标系转化,以获得Uref的组合方式,定义电压空间矢量图的横轴为α、纵轴为β,并根据正弦定理,可以对横轴和纵轴的值进行求解:
式中:
Uα—目标电压矢量在α轴上的电压分量;
|Uref|—目标目标电压矢量的绝对值;
|U0|—图4中U0(001)方向上的电压矢量绝对值;
|U60|—图4中U60(011)方向上的电压矢量绝对值。
式中:
Uβ—目标电压矢量在β轴上的电压分量。
SVPWM的调制系数m为:
式中:
m—SVPWM调制系数;
Udc—加载在电机驱动母线端的电压。
又因六项电压矢量的幅值相同,其中一相与另外两相的和为Udc,因此其到中点的幅值即为2Udc/3,对于横纵轴的计算公式可以将|U0|=|U60|=2Udc/3代入以计算出各矢量的持续时间。
式中:
Tx—获取目标Uref电压矢量需Ux电压矢量在周期T内持续的时间;
θ—目标Uref与Ux电压矢量的夹角。
式中:
Ty—获取目标Uref电压矢量需Uy电压矢量在周期T内持续的时间。
上面已经求解了Tx和Ty,而我们知道T是由Tx、T与零电压向量组成的,因此零电压向量的时间就可以求解出来。不过需要注意的是,SVPWM的控制方式分为五段式和七段式两种,因此零电压向量的时间又会因为选择的控制方式而不同。对于五段式Tz=(T-Tx-Ty),对于七段式Tz=(T-Tx-Ty)/2。
1.5 SVPWM的实现方法
这里我们可能会有点困惑,为什么控制方式到这里会有区别,五段式、七段式究竟是什么?
SVPWM的调制中基于功率器件的开关限制,零矢量的选择可以很灵活。当功率器件的开关特性较难满足开关需求或者开关损耗过大的情况下,我们就需要尽可能的减少功率器件的开关,这时就会使用到五段式SVPWM,然而相对于七段式它因为缺少了中间的过渡阶段,谐波就会比较大,平稳性也会较差。
所谓的五段式也就是将PWM的控制部分按作用的时间分为五段的方式,七段式则是将作用时间分为七段,两者比较七段式衔接部分会有一个全关的动作,整体运行更稳定,也因此谐波特性会比较好。
在SVPWM的控制中我们需要制定一个准则,就是每次切换要保证功率器件的开关次数尽量少,最好每次仅改变其中一项。为此我们将六项电压矢量划分的区域分为六个扇区,定义U0与U60之间为扇区Ⅰ,U60与U120之间为扇区Ⅱ,依次类推。因每个扇区有相同的矢量组合特性,因此开关切换内容也就相同,区别在于时间Tx、Ty、Tz之间的差异,针对该特性我们将这种组合结果进行汇总,汇总的内容有如表2所示的五段式控制方式和如表3所示的七段式控制方式。
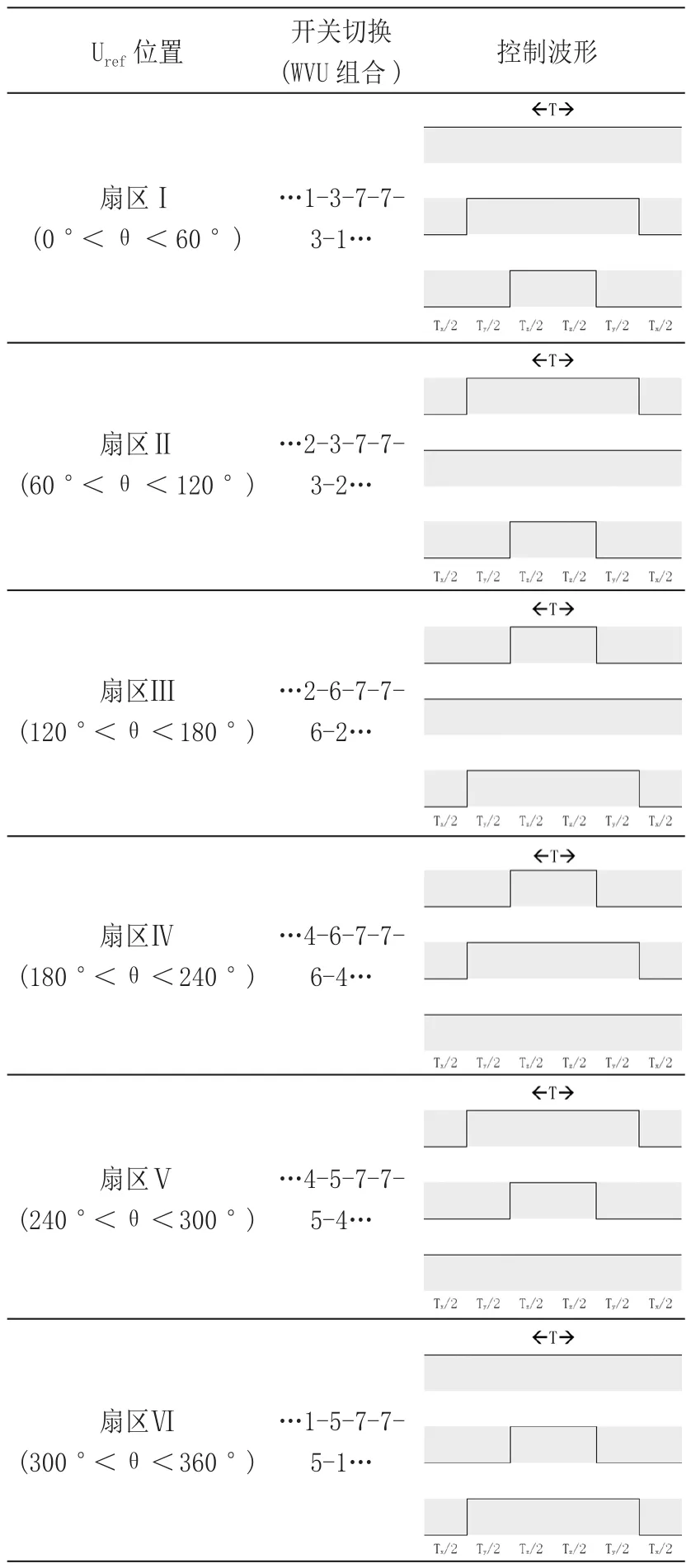
表2 Uref五段式开关顺序对照图
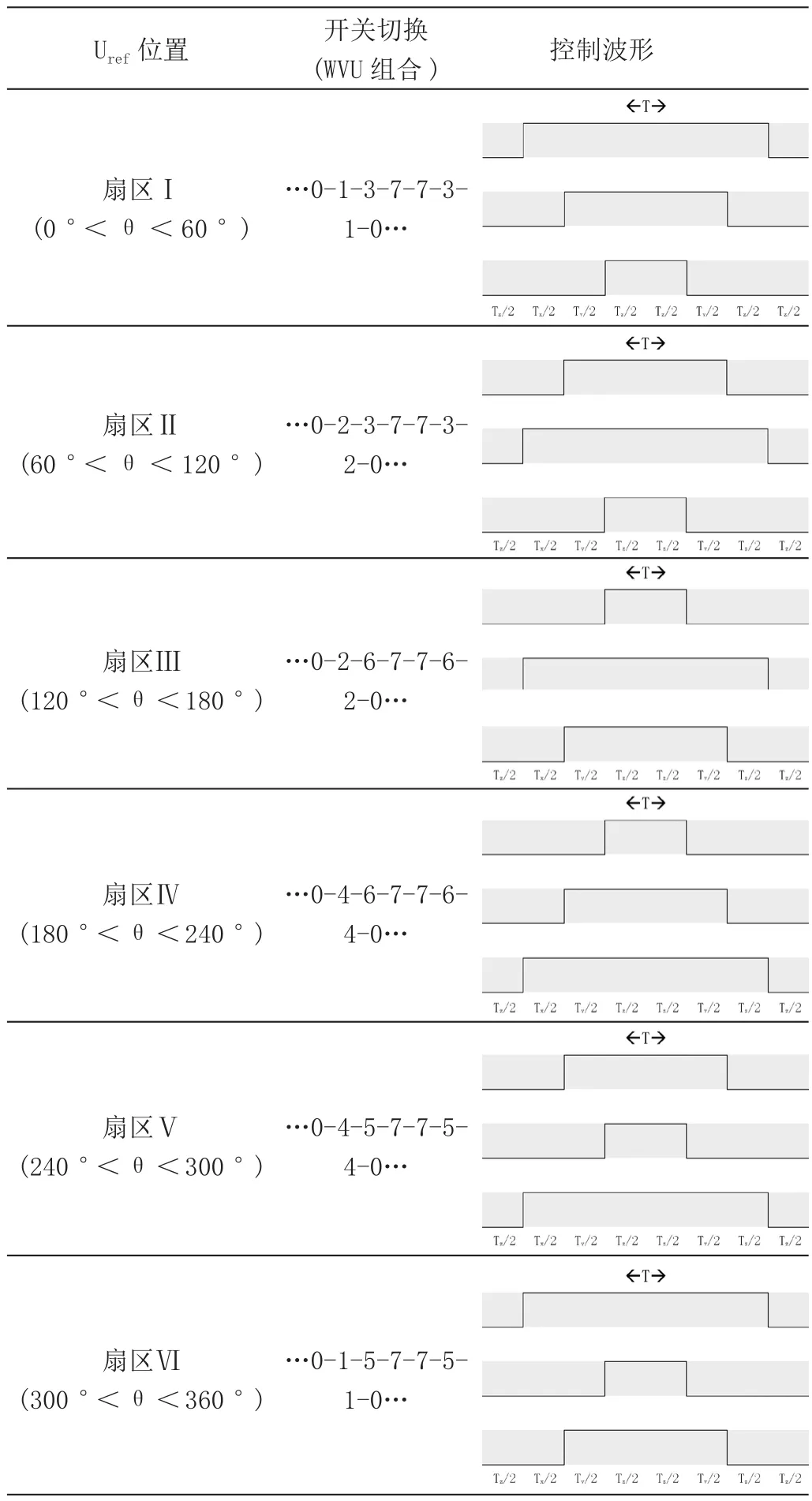
表3 Uref七段式开关顺序对照表
1.6 SVPWM的应用思路
到此我们要对电机进行SVPWM控制仅需构建Tx、Ty、Tz与T的关系即可。
不过控制基于的前提是已经获取了电机的电角度θ,电角度θ的获取方式有编码器、霍尔传感器、反向电动势等等,这里不做展开。通过电角度θ我们可以再利用Park变换取得我们需要控制的矢量角度,并据此计算出对应的SVPWM控制波形以产生目标矢量电压推动转子向预定方向转动。
同时需要对每一时刻的电角度θ进行分析计算,获取当前的角速度,以实施电压矢量大小的调节达到控速的目的。
另外由SVPWM的推导过程,我们可以看出设计的内容会相关到实际值,但将具体的数值代入程序中处理将会影响到程序的适配性。在实际应用过程中,我们需要对实际的数值进行标幺化操作,即将数值与一个标定值进行除的操作,从而获得一个固定范围的数,并将计算的过程都转化为与标幺化数值相关的操作。
通常标定值会设置为一个最大容许值。例如将Udc转化为一个标幺值(Udc/Ubase),Ubase设置为一个1.5 倍左右的Udc值,然后转化Uref为与该标幺系数相关的标幺值(Uref/Ubase),则Udc与Uref的关系就转变为(Udc/Ubase)与(Uref/Ubase)的关系。它们的结果是一致的,但是程序的适配性却能得到优化,在使用中可以满足不同电压环境的设计需求,而不用更改应用的底层程序。
2 技术特点/优势
基于SVPWM的无刷直流电机因为静音、寿命长、能效高的特点,在日常生活中承担着越来越重要的角色,并且能达到一些早期电机所不能达到的功能。
例如我们的变频式滚筒洗衣机,在洗衣的过程中,衣物因为所处位置的不同给电机带来的负载也会发生变化,在滚筒顶点与在滚筒底部需要电机克服负载作功的大小是截然不同的。对于传统的电机将会因为力矩无法调整导致震动加剧而无法满足使用需求。
又比如电动汽车上,若采用其他方式控制,电机在达到最大负荷后转速将不能再做提升,而作为矢量控制的SVPWM电机则可以通过反向磁场的控制对电机进行弱磁处理,从而达到更高的转速。
更甚至于在机器人控制的关节上,凭借SVPWM的精确控制、力矩可调的特点,使机器人的转动更精准、力度掌握更稳定。并可在工程机甲上做动作的力反馈终端,具有非常广泛的应用场景。
3 结语
本文所述的SVPWM控制办法,是永磁同步电机里输出控制的核心算法。方法可通过三相桥臂的组合控制实现力矩在任意角度的平稳输出,并使电流输出波形接近于理想的正弦波,以达到较高的能效利用率。
SVPWM的方法虽然是固定的,但是使用起来却可以很灵活,可以使用性能卓越的七段式,也可以使用略有差距的五段式。因此设计中我们不仅要考虑实现的模型及算法,也要考虑芯片的处理能力及功率器件的特性,针对特定的应用场景选择合适的方法、合理的设计来满足开发的需求。
