基于超螺旋滑模观测器的六相PMSM转速估计
2023-03-02白月建
白月建,刘 剑
(山东理工大学 电气与电子工程学院,山东 淄博 255000)
1 引言
轮毂电机独特的布置方式和结构特点,对提升军用车辆的综合性能具有显著效果,六相永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、大转矩惯量比、动态响应快等优点,是装甲车辆轮毂电机的最佳选择。作为电传动装甲车辆的直接动力来源,电机驱动性能的好坏直接影响装甲车驾驶性能,近些年,军用车辆轮毂电机驱动技术的研究得到了广泛关注[1]。
六相PMSM高性能驱动控制策略依赖于精确的转子位置信息,转子位置信息通常是通过机械式传感器测量,然而,电机系统中采用机械式传感器会产生安装精度要求高、成本高、可靠性要求高等问题,无位置传感器控制技术应运而生[2-3]。无位置传感控制技术可以在无需安装成本高昂的机械式传感器的情况下,进行电机转子位置和速度信息的获取,避免了机械式传感器带来的问题。
六相PMSM无位置传感控制系统中,位置观测算法主要包括高频注入法[4-6]、滑模观测器[7-12]、模型参考自适应观测器[13-15]和扩展卡尔曼观测器[16]等。其中,滑模观测器具有对电机参数变化不敏感、鲁棒性强、计算量少、实现简单等特点,近年来被广泛应用于六相PMSM无位置系统中。
文献[7]提出了一种用于高速六相PMSM的无位置控制策略,其利用滑模观测器(sliding mode observer,SMO)来估计六相PMSM的反电动势,采用同步频率跟踪滤波器取代传统无传感器控制方法中的低通滤波器,获得反电动势中的基波分量,并使用锁相环获得转子位置角。文献[8]提出了一种改进的SMO,其可以独立估计反电动势,以转子位置误差为扰动项,构建三阶扩展状态观测器,提高了SMO的估计精度和抗干扰能力。文献[9]通过利用连续饱和函数代替传统开关函数来改进SMO,从而有效抑制了六相PMSM的高频抖振。文献[10]在α-β子空间中设计了电流SMO,并用双曲正切函数代替符号函数作为切换函数,削弱了滑模抖振,提高了转子位置估计的准确性和系统的稳定性。文献[11]提出了一种用于内置式六相PMSM的磁链SMO,其在无位置传感控制系统中采用软锁相环磁链观测器进行转子的转速和位置估计,不仅省略了低通滤波器和相位补偿模块,而且提高了转子位置的估计精度。文献[12]在涡轮螺旋桨飞机六相PMSM驱动控制中提出一种基于自适应滑模观测器的无位置传感控制方法,采用锁相环进行转子角度估计,消除低通滤波器引起的相位延迟,提高了传统滑模观测器的性能。
上述文献中的SMO大多是在静止两相坐标系下进行速度和位置信息的估计,通过增加低通滤波器和相位补偿模块来提高估算信息的准确性,但也增加了控制系统的复杂程度。在观测器运行时,估计坐标系与实际坐标系之间存在相位滞后时,也会产生估计误差。为解决基于滑模观测器的六相PMSM无位置传感控制系统中的高频抖振和估计误差问题,本文中设计了基于旋转坐标系的超螺旋滑模观测器,同时提出了一种考虑d轴估计反电动势的转速估计算法,并对提出的超螺旋滑模观测器和转速估计算法进行仿真和实验验证。
2 六相PMSM的数学模型
本文中研究对象为相移30°且双中性点隔离的六相PMSM,其定子绕组分布示意图如图1所示。

图1 六相电机绕组示意图Fig.1 Six-phase motor winding schematic diagram
在建立本文中研究对象的数学模型时,为了达到简化分析的目的,通常作如下处理:假设转子的永磁磁场在电机气隙空间上的分布为正弦波;忽略定子铁心饱和效应,认为电机定子上的磁路为线性,电感参数不会在运行过程中发生变化;不计铁心涡流与磁滞损耗;转子上无阻尼绕组。
在以上假设的前提下,通过空间矢量解耦变换建立在同步旋转坐标系下的六相PMSM数学模型,其电压方程如式(1)所示:

(1)
式(1)中:ud,id为d轴上的电压和电流;uq,iq为q轴上的电压和电流;Ld,Lq为d-q电感,ux,ix,uy,iy为谐波子空间上的电压和电流;Lx,Ly为谐波子空间中的电感,研究对象为表贴式六相PMSM,Ld=Lq;Rs为定子电阻;ωre为电角速度;ψf为永磁体磁链。
图1中的两套三相绕组采用双中性点隔离的连接方式,经过空间矢量解耦变换后,零序子空间中的分量为0,x-y子空间包含6k±1次谐波,不参与机电能量变换,α-β子空间经过Park变换后的d-q坐标系中包含基波和12k次谐波,在d-q坐标系中设计观测器时,三相电机观测的电流如式(2)所示[17],六相PMSM进行观测的电流如式(3)所示:
(2)
(3)
其中:θ1和I1为基波的初始相位和幅值,θ6k±1、θ12k±1、I6k±1、I12k±1为谐波的初始相位和幅值。比较式(2)和式(3)可知,六相PMSM中被观测的d-q轴电流中谐波幅值更小,更有利于d-q坐标系下超螺旋滑模观测器的设计。
3 基于超螺旋滑模观测器的转速估计
3.1 传统滑模观测器的设计
六相PMSM在α-β坐标系下的电流方程如式(4)所示:
(4)
传统滑模观测器的状态方程如式(5)所示:
(5)
通过式(5)和式(4)作差,获得电流误差动态方程:
(6)
式(6)中的观测反电动势如式(7)所示:
(7)
转速和角度的估计表达式如式(8)和式(9)所示:
θ=-arctan(vα/vβ)
(8)
(9)
滑模控制中的被控制量是一个离散的高频切换信号,因此观测的反电动势中存在抖振,式(8)的反正切运算和式(9)的开方运算会将抖振代入转速估计和角度估计中。
3.2 超螺旋滑模观测器的设计
为了抑制观测过程中高频切换信号导致的抖振,并降低负载对于转速估计误差的影响,本文提出了一种d-q坐标系下的超螺旋滑模观测器。超螺旋算法[18-19]是一种二阶滑模控制算法,表达式如式(10)所示

(10)
式中,k和a为超螺旋滑模观测器的增益系数。
六相PMSM在d-q坐标系下的电流状态方程如式(11)所示:
(11)
式中,Ed=0,Eq=ωreψf是d-q坐标系下的反电动势。
d-q坐标系下超螺旋滑模观测器的状态方程如式(12)所示为:
(12)
超螺旋滑模观测器中的估计反电动势如式(13)所示:
(13)

与式(7)相比,采用式(13)对反电动势进行观测时,超螺旋滑模控制算法中积分项对饱和函数抖振进行了抑制,并通过误差绝对值的开方项提高了收敛速度。
(14)
(15)

3.3 观测器的稳定性分析
通过李雅普诺夫稳定性理论对式(15)进行稳定性分析,首先构造李雅普诺夫函数如式(16)所示:
(16)
对式(16)求导可得李雅普诺夫函数的导数如式(17)所示:
(17)
将式(15)代入式(17)可得:

(18)
考虑d轴反电动势对转速估计的影响,将式(18)拆分为3部分进行分析。为了确保电流动态误差方程全局渐近稳定,应使式(18)小于0,即应满足关系式(19)—式(21):
(19)
(20)
(21)

(22)
将式(13)代入式(22)可得:
(23)
估计角度通过估计转速的积分运算获取,表达式如式(24)所示:
(24)
4 仿真与实验分析
在d-q坐标系下建立超螺旋滑模观测器,并通过式(23)进行转速信息的估计,通过4个电流环和一个转速环对六相PMSM进行控制,并采用四矢量SVPWM调制算法,进行六相PMSM无位置控制系统的闭环控制,对所提算法的有效性进行验证。仿真和实验中使用的六相PMSM参数为:Rs=50 mΩ,Ld=Lq=1.03 mH,ψf=0.171 Wb,极对数为4。
4.1 仿真分析
在六相PMSM无位置传感控制系统的仿真中,对加载和转速突变2种工况进行分析。在加载工况仿真中,设定额定转速为1 000 r/min,在0.1 s时施加50 N·m的负载转矩。在转速变化工况仿真中,初始转速设为1 000 r/min,在0.2 s时转速变为1 500 r/min,0.3 s时转速变为1 000 r/min。图2为2种工况下2种观测器下的估计转速曲线。

图2 2种观测器下的转速仿真曲线Fig.2 Simulation curves of speed under two kinds of observers
由图2可知,稳态工况下,采用传统滑模观测器的无位置控制系统具有峰值为14 r/min的高频抖振,在加载和转速突变工况下分别存在50 r/min和70 r/min的稳态误差。与传统滑模观测器相比,采用本文提出的超螺旋观测器和转速估计算法的无位置传感器控制系统中的估计转速能够快速准确的跟随实际转速,且估计转速中不存在高频抖振和估计误差,说明本文中所提出算法具有较高的估计精度。
图3为d-q轴反电动势波形,图4为考虑Vd与不考虑Vd时估计转速和实际转速的对比曲线,图5为估计误差曲线。由图3可知,在系统运行过程中,估计的d轴反电动势与实际d轴反电动势相比,具有随工况改变的误差现象。通过图4中3种转速曲线和图5的转速估计误差曲线可知,只考虑Vq进行转速估计时,能够实现实际转速的跟随,但在1 000 r/min仍然存在8 r/min的转速误差,当转速变为 1 500 r/min时,转速误差变为10 r/min。通过Vd的修正能够减小转速估计误差,提高了转速估计的准确度。

图3 d-q轴反电动势曲线Fig.3 d-q axis back EMF curve

图4 转速仿真曲线Fig.4 Speed simulation curve

图5 转速误差仿真曲线Fig.5 Simulation curve of speed error
4.2 实验分析
为了进一步验证所提算法的有效性,搭建了实验平台如图6所示。该实验平台控制器选用英飞凌公司的TC264,开关器件选用型号为FF450R17ME4的IGBT,电流霍尔传感器选用LEM公司CASR15-NP,测功机系统由张力测控的610L,张力公司的CZ-40磁粉制动器,TSRU- 405扭矩传感器组成。采用高速串口通信进行速度指令的更改和电机反电动势、转速信息的读取,并将读取的数据存为csv类型文件进行分析。

图6 实验平台Fig.6 Experimental platform
图7为转速突变工况下的反电动势曲线,通过图7(a)和图7(b)可以看出,在转速上升的过程中,估计的反电动势Vq与实际转速的变化趋势大致相同,稳定后的幅值从73 V上升为106.9 V。Vd在转速上升过程中出现了尖峰,在稳定后幅值从-1 V降低到-2 V,同理,转速下降过程中估计的反电动势与实际反电动势也存在估计误差。由于d-q轴电压方程中存在耦合,超螺旋观测中的sd和sq具有不同的变化趋势,因此Vd和Vq的变化趋势也不同。

图7 转速突变时的估计反电动势曲线Fig.7 Estimated back EMF curve at velocity jump
图8为采用本文提出的转速估计表达式在转速突变工况下的转速曲线,通过图8(a)和图8(b)可知,估计的转速在实际转速突变的过程中能够实时跟随实际转速。但由于Vd和Vq的变化趋势如图7所示,在转速估计误差收敛过程会出现快速收敛的振荡,趋于稳定后,估计误差为±1 r/min。

图8 转速突变时的实验曲线Fig.8 Speed curve of velocity jump
图9为加载工况下的转速曲线和反电动势曲线,通过图9可知,在加载后,估计转速能够实现实际转速的跟随,但转速估计误差出现了28 r/min的尖峰并迅速收敛为稳定值,Vq和Vd出现了0.5 V左右的幅值变化。转速和估计反电动势产生幅值变化的原因在于,加载后iq增加,超螺旋滑模观测器中的sq会增大,超螺旋滑模增益系数包含sq绝对值的开方项从而导致Vq出现了幅值变化,同时因为d-q轴电压方程中电流的耦合,Vd也会产生变化,根据式(22)可知,Vq和Vd出现变化时估计转速也会发生变化。

图9 加载工况下的实验曲线Fig.9 Experimental curves under loading conditions
图10为加载和转速突变工况下的估计角度曲线,对于转子初始位置角的获取采用预定位的方式,估计角度为估计转速的积分值。通过图10可以看出,采用本文中提出的观测器进行估计的角度能够跟随实际的角度,但由于采样时延和观测时延的存在造成一定的相位滞后,与图7和图8中Vd因角度滞后出现的误差进行了相互验证。
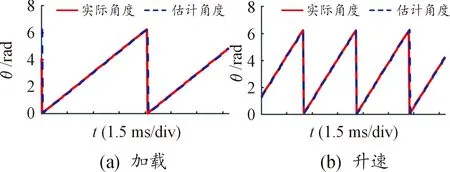
图10 2种工况下的角度曲线Fig.10 Angle curves under two working conditions
5 结论
本文设计了一种基于旋转坐标系下的超螺旋滑模观测器,并提出一种新型转速估计算法,应用于军用轮毂六相PMSM的无位置控制系统中。通过仿真和实验验证了该算法的可行性和有效性,证明了本文中所提算法具有以下优势:
1) 采用d-q轴电流作为状态变量进行超螺旋滑模观测器设计,省略了低通滤波器和相位补偿模块,在不增加系统复杂程度的前提下,抑制了传统滑模观测器中的高频抖振,提高了滑模观测器转速估计的准确性。
2) 考虑了估计坐标系的相位滞后对转速估计误差的影响,在转速估计算法中引入d轴估计反电动势降低了加载和转速突变工况下的转速估计误差。
综上所述,相比于传统的滑模观测器,本文所提出的算法能够避免系统抖振产生的能量损耗,提高转速估计精度,进而改善军用轮毂六相PMSM无位置控制系统的动态性能。