基于PID控制器的半主动悬架联合仿真分析
2023-03-02杨慧勇
杨慧勇
(长安大学 汽车学院,陕西 西安 710064)
汽车在行驶过程中,路面作用于车轮的力和力矩都要通过悬架系统传递到车身,悬架系统特性的好坏决定整车的平顺性[1]。传统的被动悬架其阻尼和刚度参数经折衷设计完毕后便无法改变,使车辆无法适应变化的行驶工况及随机道路激励。半主动悬架根据车辆运行工况改变减振器阻尼力,从而改善车辆行驶时的振动特性,提高舒适性与安全性,其控制策略中比例-积分-微分(Proportional Integral Derivative, PID)控制器由于结构简单、参数易整定和实用性强等优点被广泛应用于主动悬架等工业控制中[2]。
辽宁工业大学的张丽萍副教授采用AMESim与Simulink软件进行联合仿真,用AMESim软件搭建车辆1/4主动悬架模型,Simulink提供PID控制算法,分别用联合仿真和只用Simulink仿真的方法分析了车辆 1/4 主动悬架模型的平顺性,证明了两种方式最终结果完全一致,而联合仿真简化了建模过程[3]。同样采用ADAMS软件也可以更加迅速准确地提供车辆动力学模型,只需在Simulink中搭建相应控制算法,使用ADAMS与Simulink联合仿真往往可以极大提高研究者的工作效率。
ADAMS和Simulink之间的共同控制过程是在ADAMS中构建多体控制系统,接着由ADAMS提供表示系统方程的相关参数,其作用是S-Func- tion,再在Simulink中读入由ADAMS中Control模块输出的信息并建立起控制方案,再由Simulink计算控制系统方程式,最终共同完成对整体控制系统过程的计算[4]。
本文采用PID控制器对二自由度半主动悬架模型进行ADAMS-Simulink联合仿真研究,分析对比了主被动悬架车身加速度、轮胎动行程及轮胎动载荷的时域响应特性。
1 悬架模型
1.1 二自由度半主动悬架模型
二自由度悬架模型由非簧载质量、簧载质量、弹簧和阻尼器组成,虽然结构简单,但可以获得代表平顺性的簧载质量(车身)垂向加速度、代表操稳性的悬架动行程以及代表安全性的轮胎动载荷,能较好地反映车辆的垂向振动特性。但是要构建二自由度悬架模型就必须做出以下假定:1)两侧车轮所受路面激励一致,车辆对其纵轴线左右对称,即车辆不存在侧倾振动,没有侧向位移,没有横摆振动,只有垂直振动;2)车轴和与其相连的车轮视为非簧载质量,车轮在中心线上与路面为点接触;3)车辆悬架的质量分配系数为1;4)忽略轮胎阻尼,只考虑其刚度[5]。
半主动悬架其阻尼力可根据车辆相应的运行工况在一定范围内有级或无级调节,可视为在上述二自由度悬架模型的基础上在簧载质量和非簧载质量之间添加一个主动的可变阻尼力,故简化后的二自由度半主动悬架模型如图1所示。

图1 二自由度半主动悬架模型
半主动悬架动力学方程如下:
式中,ms为簧载质量;mu为非簧载质量;ks为弹簧刚度;kt为轮胎刚度;c为阻尼系数;Fd为主动控制力;xr、xu、xs分别为路面、车轮与车身位移。文中悬架参数如表1所示。
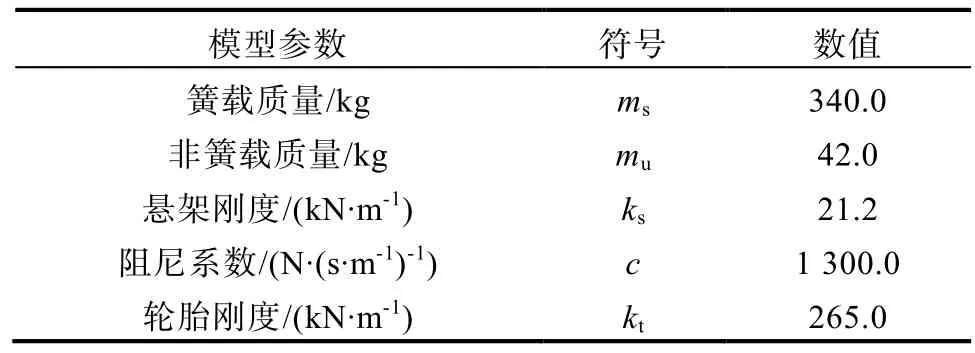
表1 二自由度悬架参数
1.2 Adams建立半主动悬架模型
选取零件库中的质量块、力库中的弹簧/阻尼器和单向力、约束库中的平移约束,根据表1所示的悬架参数和图1的简化悬架模型,在ADAMS中搭建如图2所示的二自由度半主动悬架模型。
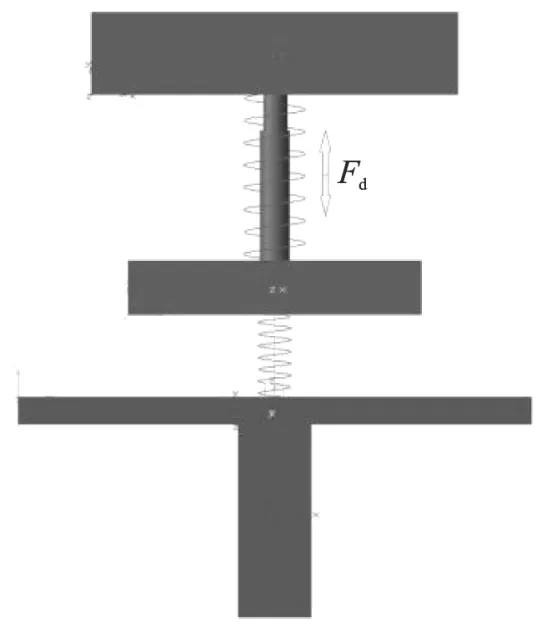
图2 Adams半主动悬架模型
悬架模型由模拟簧载质量、非簧载质量的质量块、模拟路面的振动台组成,并分别添加竖直平移约束,保证各部件只能在垂向运动。在簧载质量与非簧载质量的中间加入了弹簧和阻尼器,并设置单向力模拟半主动悬架的主控控制力。在非簧载质量块与振动台间增加了弹簧力,用来模拟轮胎刚度。
建立车身垂直加速度、垂直速度、悬架动行程及轮胎动载荷状态输出函数如下:
ACCY(.adams_pid_sus.body.cm);
VY(.adams_pid_sus.body.cm);
0.2139 -DY(body.cm,wheel.cm);
.MODEL_adams_pid_sus.SPRING_1.force;
以上函数将作为Adams输出数据通过Control模块输出到Simulink模型中。
建立路面输入、悬架主动力函数如下:
VARVAL(.adams_pid_sus.road_shuru);
VARVAL(.adams_pid_sus.zhudongli_shuru);
以上函数分别作用于主动控制力Fd和用来模拟路面激励的振动台的驱动上,并作为输入数据由Simulink模型中输入到Adams模型中。
2 路面模型与PID控制器设计
2.1 路面模型
按照标准公路级别可划分A至H共八级,由于实际开展道路谱采集费时且难度大,目前国内外广泛应用滤波白噪声法、时间序列模型法、积分白噪声法等方法建立道路试验模型[6-7]。本文采用滤波白噪声法,用式(3)描述路面的时域模型;以MATLAB/Simulink为仿真平台,根据公式建立不同车速下B级路面的仿真模型,如图3所示。
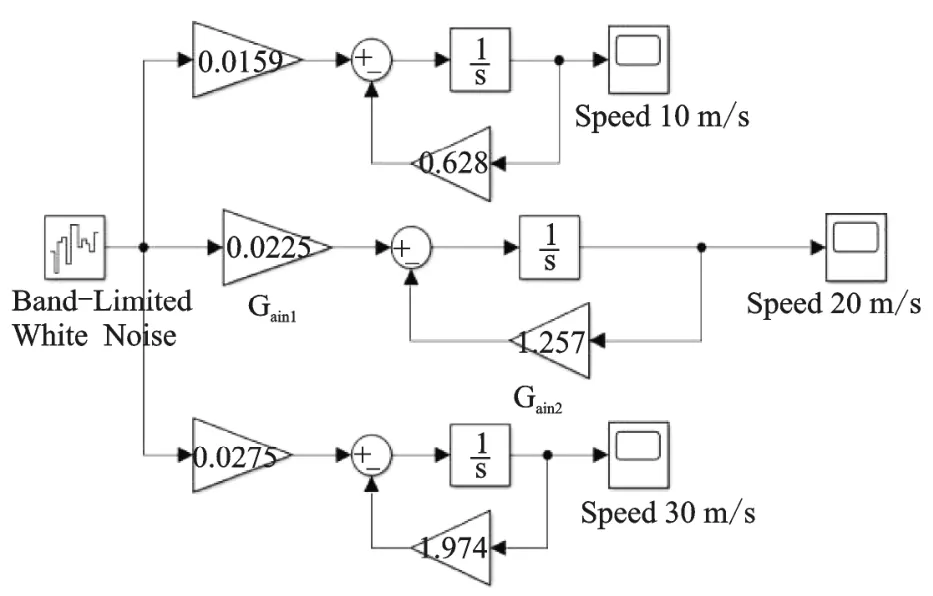
图3 不同车速下B级路面时域仿真模型
式中,q(t)为路面随机高度;Gq为路面不平度系数;μ为车速;n0为参考空间频率,n0=0.1m-1;n1为下截至空间频率,为使最大路面波长A=100 m,n1的取值为0.01m-1。
模型中的滤波白噪声发生模块参数设置如下:噪声功率为0.5;采样时间为1/10μ;种子值设定保持默认;增益模块Gain2=2πn1μ。不同车速下B级路面的随机高度如图4所示。
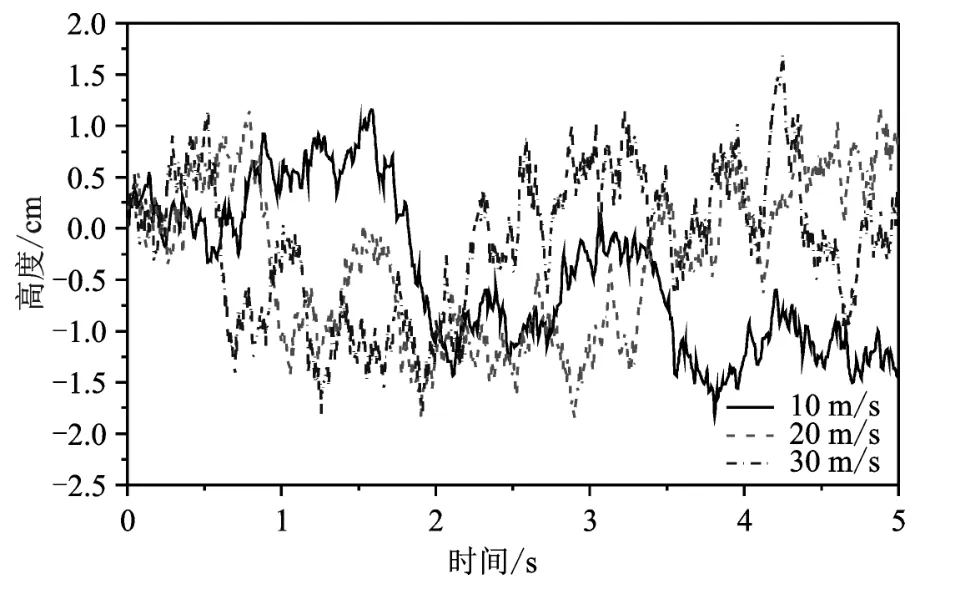
图4 不同车速下B级路面随机高度
2.2 PID控制器设计
PID控制虽然早在上世纪30年代就出现,但直到今天仍是各种工业控制领域应用最为普遍的闭环控制器,其调节原理简单,实用性强,控制规律如式(4)所示:
式中,u(t)为PID控制器的输入信号;Kp为比例系数;KI为积分环节系数;Kd为微分环节系数;e(t)为实际信号与期望信号的误差。此次对半主动悬架PID控制中,将主动控制力(即可变阻尼力)作为控制量,车身垂直加速度作为控制目标期望尽可能小,故参考值设为零。在Simulink中搭建半主动悬架的PID控制仿真模型,如图5所示。
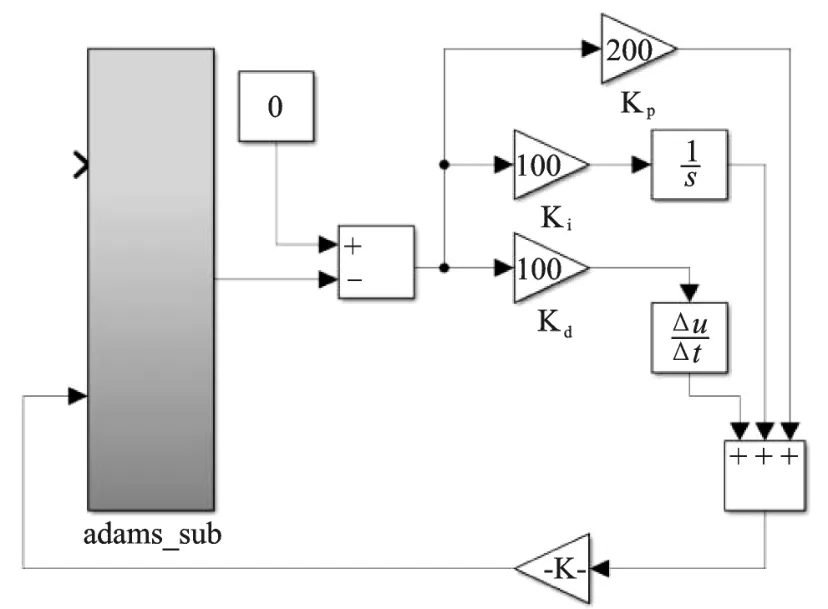
图5 半主动悬架PID控制仿真模型
在经过反复的调参仿真试验之后,最终确认了PID控制器的三项具体参数分别是Kp=200,KI=100,Kd=100。
3 联合仿真接口设置
3.1 ADAMS中Control模块的设置
点击系统建模工具条Plugins中的ADAMS Controls,选中【Plant Export】,会弹出如图6所示的控制系统对话框。自定义Control文件前缀为Control_Plant_3,初始静态分析勾选“是”,在输入信号栏中加入输入变量,即路面随机高度和主动控制力,在输出信号栏中加入输出变量,即车身垂直加速度、垂直速度、悬架动行程以及轮胎动载荷,目标软件选择MATLAB,分析类型为非 线性。由于要求进行初始静态分析,所以求解器ADAMS Solver必须选择FORTRAN,否则会仿真失败。ADAMS主机名称为本机域名,与本机Simulink仿真时选择默认即可,若与其他电脑进行联合仿真则输入该电脑域名。
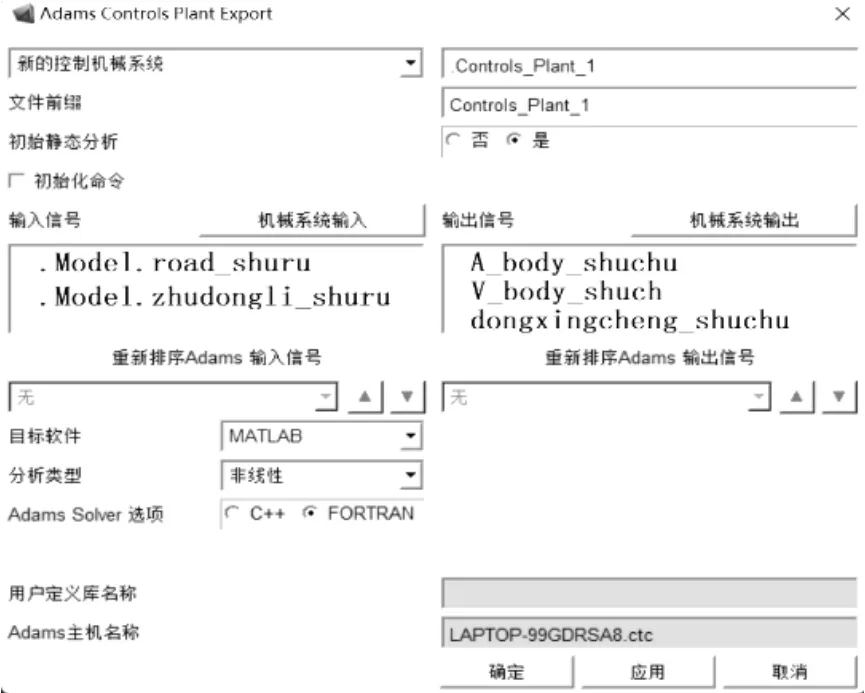
图6 Control模块设置
3.2 Matlab导入Adams模型
在Matlab的命令行窗口中输入上文Control文件前缀,即Control_Plant_3,单击回车,此时命令窗口显示出输入输出集信息。再在命令行窗口输入adams_sys,单击回车就可在Simulink窗口中调出adams中建立的半主动悬架模型。
4 仿真分析
导通Adams与Simulink之间的通信,在Simulink中对路面模型及PID控制器进行封装,建立半主动悬架联合仿真模型,如图7所示。仿真时间设定为10 s,车辆分别以10 m/s、20 m/s、30 m/s的速度在B级路面上行驶,仿真得到半主动悬架的车身加速度、悬架动行程和轮胎动载荷的时域结果,然后将PID控制器模块去掉,模拟被动悬架再次进行相同的仿真,并与半主动悬架进行比较。其中20 m/s时的主被动悬架仿真结果如图8—图10所示。
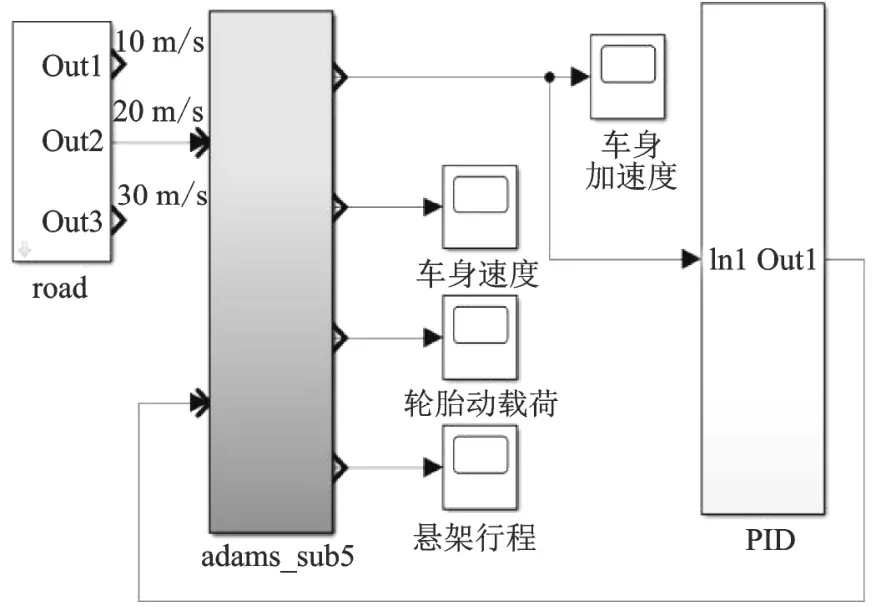
图7 联合仿真模型
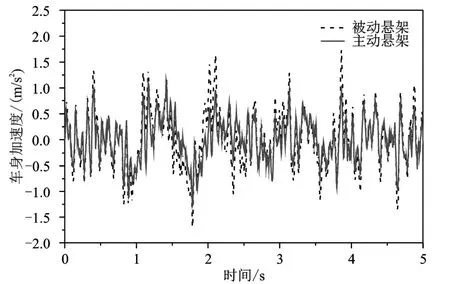
图8 车身垂直加速度
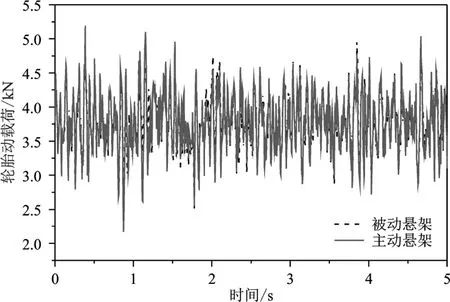
图10 轮胎动载荷
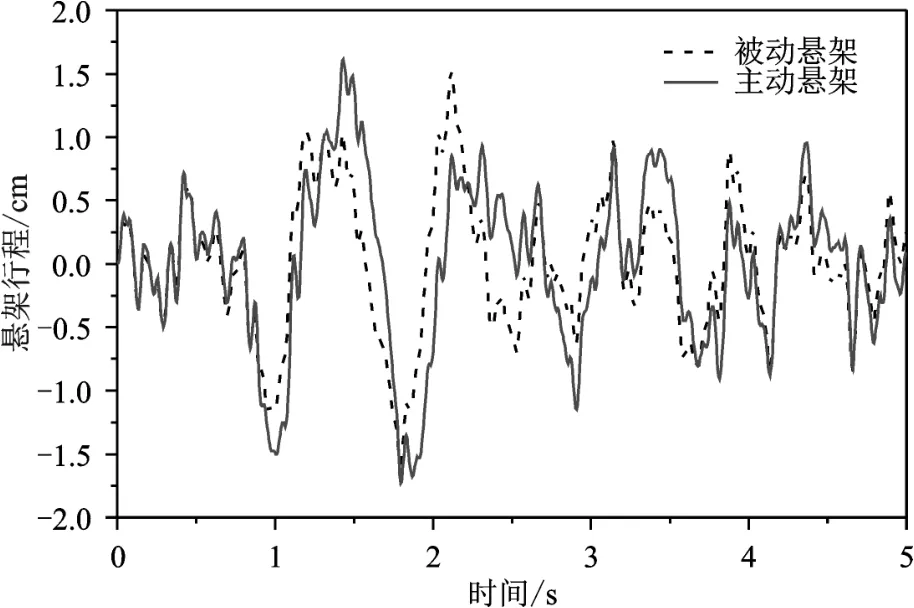
图9 悬架动行程
从仿真结果可以看出,相较于被动悬架基于PID控制器的半主动悬架车身垂直加速度大幅度降低,在全速范围内极大地增加了乘坐舒适性。悬架动载荷和轮胎动载荷相较于被动悬架虽然改善并不明显,但也在一定程度上克服了被动悬架提高平顺性就会恶化操稳性、安全性的矛盾。
5 结论
本文采用一种基于ADAMS和Simulink的联 合仿真的方法,在ADAMS中建立车辆1/4半主动悬架模型,在Simulink中建立了B级路面模型,并采用PID控制器以簧载质量加速度为控制器输入量对主动控制力进行控制,比较了半主动悬架和被动悬架车辆行驶时车身加速度、悬架动行程和轮胎动载荷的时域特性,可得如下结论:
1)半主动悬架采用PID控制器后,在保证操稳性、安全性不恶化的情况下整车平顺性相对于被动悬架显著提高;
2)采用联合仿真的研究方法可极大简化复杂的数学建模过程,仿真过程简明直观,提高了研究效率。
