汽车防追尾外置安全气囊预警系统设计与仿真
2023-03-02陈一凡
陈一凡,羊 玢
(南京工程学院 汽车与轨道交通学院,江苏 南京 211167)
追尾事故由于前车无法感知后方危险,一直是中国道路事故中占比最大,伤亡率较高的事故类型,尤其是在高速状态下发生追尾事故,由于车辆后部的防撞结构薄弱,车身吸能条件有限,非常容易诱发连环追尾,导致更多的人员伤亡和财产损失。伴随着汽车电子系统的发展,各个系统之间的集成为了可能[1],BOSCH将主动和被动安全系统结合,设计了在碰撞无法避免的预碰撞阶段预紧安全带,并点爆气囊实现乘员的提前约束;采埃孚研发了预碰撞外置侧面安全气囊,在碰撞发生前在两车之间人为制造了一个缓冲区[2];吉林大学岳柄剑基于多源多目标统计信息融合的智能网研究出高精度定位的网联汽车来避免交通事故[3];长安大学与利兹大学研发了基于专用短程通信(Dedicated Short Range Communication, DSRC)的追尾预警系统,通过前后两车的短距离通信在两车之间实现数据收集,进行安全距离算法的验证并在危险阶段实现预警功能[4];吉林大学研发的外置气囊式车辆侧翻安全系统,通过干预气囊对侧倾中心产生侧翻干预力矩防止侧翻的发生[5]。
国外的安全研究大都建立在汽车本有的被动安全约束系的研究,强调与主动安全传感器的数据衔接,在预碰撞阶段提前启动约束系,预警效果不够明显,国内的研究大多以预警为主,对碰撞无法避免时的汽车安全系统的研究比较稀少。因此,本文设计了一套汽车防追尾外置安全气囊预警系统,不仅可以对即将发生的追尾事故做出预警,同时可以在预碰撞阶段提前约束乘员,点爆后端外置安全气囊,吸收高速追尾时的冲击力。
1 防追尾最小行车车距算法数学模型
1.1 高速公路安全距离模型
高速公路封闭的特征使高速行驶的汽车不会受到横向车辆或者行人对其行驶的干扰,交通路况相对理想,车祸风险绝大部分来自纵向车辆的制动不及时亦或是跟车距离较小导致的追尾事故。故两车直道行驶时,前车A制动后车B立即制动工况公式为
式中,SA为车辆A的制动位移;SB为车辆B的制动位移;ΔS为制动停止时两车间的距离;S” 为制动前的跟车距离。
1.2 车辆制动数学模型
由于车辆安全跟车距离的确定与A、B两车的制动距离有关,所以需要对车辆的制动过程做分析。汽车制动过程主要分为4个时间段[6]:驾驶员反映时间t1、消除空行程时间t2、制动器起作用时间t3和持续制动时间t4。
在制动过程中A车的位移为t3与t4时间段的位移之和SA的表达式为
式中,abmax为制动产生的最大减速度;uA为A车车速。
B车在A车制动器工作刹车灯亮起时才会采取制动措施,故B车的位移为t1到t4四个时间段的位移之和,SB的表达式为
式中,uB为B车车速。
将式(2)和式(3)代入式(1)可得制动停止时两车间的距离ΔS的数学表达式为
式中,t1、t2、t3和abmax可提前设定,uA通过车速传感器获得,车载雷达测得两车之间距离S” 以及相对速度uR,再由公式uB=uA-uR得到B车车速。
2 防追尾外置安全气囊预警系统设计
防追尾外置安全气囊预警系统设计由三个子系统组成,即追尾安全距离预警系统、外置安全气囊点爆系统和安全带预紧系统。将约束系统,报警系统和主动安全系统结合起来,用声音以及安全带预紧两种方式相结合去提醒司乘人员后方的不可视的危险,同时在安全带与外置安全气囊的配合之下使乘员无论在高速或低速追尾的情况下都可以收到应有的保护,低速追尾以安全带约束乘员,车身吸能,高速追尾时安全带更强力约束乘客,外置安全气囊点爆,气囊先卸去一部分碰撞冲击力,而后的冲击力由车身承担。系统架构如图1所示。

图1 防追尾外置安全气囊预警系统架构
2.1 追尾安全距离预警系统
由于此预警系统有预警作用,因而此系统采用保守策略在有一定危险概率的情况下就开始发出微弱的预警信号,在高危情况下发出急促的高频信号,强提醒驾驶员紧急规避。该预警系统的判断参数定为两车理论刹停距离ΔS,考虑到各车的制动效率,设定2 m<ΔS<3 m为弱危险工况,即两车理论刹停距离在2~3 m时,对于后车刹车效能较低的情况下有追尾的可能性,在此情况下采取保守策略报警,在此阶段车内喇叭会给出低频警报信号,提醒驾驶者注意后方来车。设定ΔS< 2 m为高危险工况,即在这个距离区间中,即使后车有较强的制动效能仍有被追尾的风险,此时车内喇叭会发出高频信号提醒驾驶员立即采取加速或者变道的规避措施。当ΔS<0 m时即认为碰撞无法避免,此时在车内播放高频警报音的同时会预紧安全带以提醒司乘人员即将到来的碰撞。由于采用保守的报警策略,预警系统不引入其他量进行辅助判断。
2.2 外置安全气囊点爆系统
本系统的主要目的是根据传感器的信号判断当前工况是否会发生不可避免的追尾事故,并在高危情况下,在碰撞发生前提前点爆车尾的外置安全气囊从而卸去大部分碰撞冲击力,来保护车内乘客以及减轻后车的损伤。本系统包含启动复位、气囊点爆、点爆抑制三条阈值线来确保后置气囊仅在高冲击力追尾情况下才会引爆,最大程度在保证碰撞后的维修经济性的同时保证气囊点爆的可靠性。
2.2.1 点爆系统的启动
设定系统启动阈值是为了在高危情况下确保系统处于启动状态,有足够充足的时间或者距离读取车辆的环境数据,气囊点爆的可靠性和即时性,而设定复位阈值是为了在日常行驶时使点爆算法关闭,减少低速碰撞时的不必要的点爆,以及不必要的运算空间,同时也减少了气囊误爆的风险。
算法启动的条件较为苛刻,阈值基于两个变量,一个是基于数学公式算出的两车理论刹停距离ΔS,另一个是基于雷达输出的两车相对速度uR。只有当理论刹停距离小于阈值2 m,表示有极高的追尾风险,当两车相对速度大于阈值30 km/h即两车具有极高的相对速度,发生碰撞时的伤害也较高。只有同时满足这两个条件时外置安全气囊的点爆系统才会启动,进而再去接受相应的判断信号。
2.2.2 点爆系统的抑制
在系统启动的同时如果雷达模块给出的两车相对速度小于30 km/h时抑制点爆算法,即使在最后车辆发生碰撞也不会点爆外置安全气囊。相关数据表明[7],在两车在低速碰撞时前车的后保险杠与车体结构以及后车的前部保险杠与车体结构即可吸收车辆追尾所产生的能量,此时考虑到车辆的维修经济性,不点爆外置安全气囊。
2.2.3 点爆系统的判断
具体判断方式为判断两车车距S” 与气囊完全展开时的厚度T之间进行比较,当两车之间的距离等于气囊厚度T时,如果此时两车之间仍然存在相对速度,即说明此时点爆气囊可及时卸除部分追尾冲击力,但考虑到存在后车极限刹车情况即两车最终停止时的距离小于气囊厚度,此时如果点爆安全气囊有可能无法起到防护追尾的作用还很有可能造成比较大的维修成本,以及后车前部的一些不必要的部件损坏。同时以两车相对速度uR作为辅助判断量来避免误作用。上节讨论了算法的抑制阈值为30 km/h,而考虑到算法判断气囊点爆时的距离非常小,此时设定的安全阈值也应该适当降低,此处选择15 km/h作为安全阈值。当两车距离小于气囊厚度且两车相对速度大于 15 km/h时,点爆气囊以降低车身受到的冲击。当两车距离小于气囊厚度但两车相对速度没达到安全速度阈值时,气囊是不点爆的,因为在这样的时速下即便发生追尾工况,两车也不会造成太大的车体变形,人员几乎不会受伤。
2.3 安全带预紧系统
本系统与气囊点爆系统相互独立,目的有二,一是为了保证点爆气囊前乘员已经收到安全带的提前约束;二是在发生碰撞但点爆算法不启动的情况下给予车内乘员最基础的保护,使受伤的风险降到最低。由于安全带在低速情况下也需要预紧,所以输入量只需要满足可以判断两车目前状态是无法避免发生碰撞的状态,安全带预警系统就会启动,拉紧安全带提前束缚乘员,保证其在撞击时已经被安全带完全约束,从而降低乘员颈部挥鞭伤的风险。
安全带预紧系统的判断值为两车理论刹停距离ΔS,但为了防止高速路段因为超车而产生的两车理论相对刹停距离ΔS<0的情况,进而引入一个辅助判断量即两车相对距离S” 。即在两车理论刹停距离小于安全阈值0时,我们可以近似认为两车相撞无可避免并开始预紧安全带来约束乘员,在这种判断条件下将安全带预紧分为两个等级, 当两车车距小于3 m大于气囊厚度T时,启动一级预紧,即安全带轻微拉紧,与车内提示音一起对驾驶员起到一定的提示作用;当两车车距小于气囊厚度T时启动二级预紧,即安全带强力拉紧将乘员固定在座椅上。
3 CarSim与Simulink的联合仿真
防追尾外置安全气囊预警系统逻辑判断图如图3所示,在此基础上构建基于Simulink控制系统模型,通过CarSim模拟的追尾工况,并将模拟数据输出到Simulink模型中去实现两个软件的联合仿真来验证所设计系统的可行性
3.1 Simulink建模
3.1.1 追尾安全距离预警系统建模
该系统的判断参数定为两车理论刹停距离ΔS,两条阈值线为2 m和3 m,涉及逻辑判断,阶跃信号输出,以及选择输出的功能,故选用MATLAB Function的逻辑判断脚本来实现对ΔS数值范围的判断,Pulse Generator模块改变period 和Pulse Wide实现对阶跃信号频率和信号持续时间的编辑,Multiport Switch模块实现判断并输出相应信号的功能。追尾安全距离预警系统 Simulink模型如图2所示。

图2 追尾安全距离预警系统Simulink模型
3.1.2 外置安全气囊点爆系统建模
该系统的判断参数定为两车理论刹停距离ΔS、两车相对速度uR和两车车距S”,所设计的外置安全气囊点爆系统Simulink模型如图3所示。
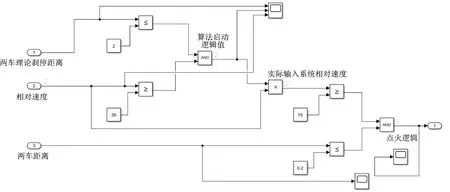
图3 外置安全气囊点爆系统Simulink模型
3.1.3 安全带预紧系统建模
该系统与外置安全气囊点爆系统逻辑判断类似,用自定义脚本来对输入的两车车距 进行区间判断,所设计的安全带预紧系统Simulink模型如 图4所示。
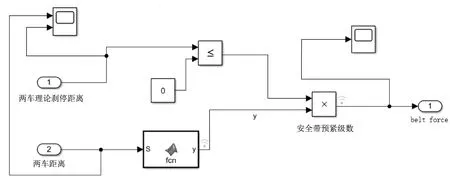
图4 安全带预紧系统Simulink模型
3.1.4 两车理论刹停距离建模
对式(4)进行参数代入,整理得到两车理论刹停距离为
通过Simulink自带的算法模块可以搭建出两车理论刹停距离计算模块如图5所示。
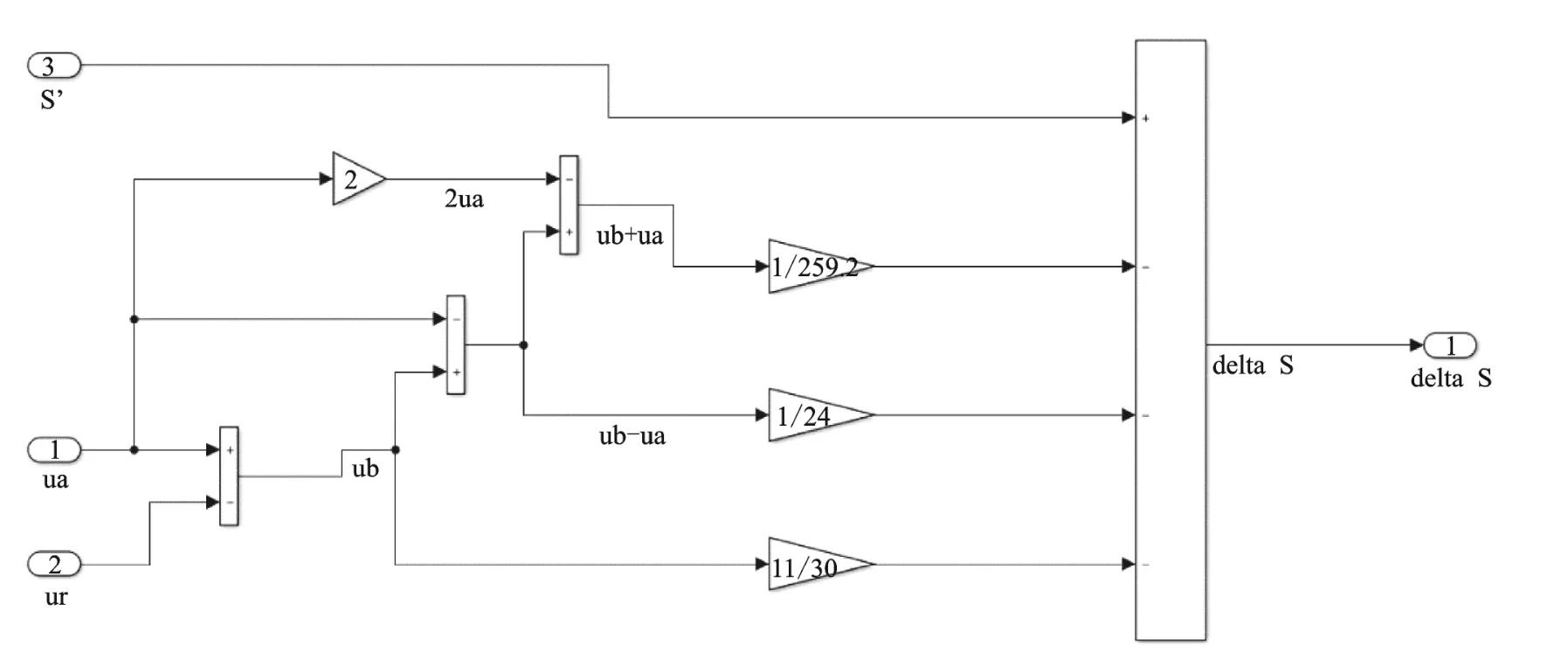
图5 两车理论刹停距离计算模块
3.2 CarSim与Simulink的联合模型
在CarSim中对车型、制动防抱死系统(Antilock Brake System, ABS)、路况进行设置,两车距离设置为20 m,设置A车以90 km/h的时速行驶5 s,此时A车将以最大减速度10 m/s2紧急制动,即在7.5 s时车辆速度降为0 km/h;B车也以90 km/h的时速在A车制动1.62 s后以最大减速度10 m/s2制动。
将设置好的CarSim导入Simulink中构建CarSim与Simulink的联合模型,其中CarSim输出到Simulink的变量为两车相对距离 、前车速度和两车车距。
3.3 仿真结果与分析
在两车相距20 m的工况下进行仿真,联合仿真结果如图6所示。

图6 仿真结果
从结果中可以看出两车在7.2 s时发生碰撞,两次理论刹停距离ΔS在整个工况下小于0,故系统一直进行高频警报,外置安全气囊也在两车距离小于气囊厚度的时候快速响应,输出相应的点爆逻辑值,而两车距离小于设定值3 m时安全带 输出了一级预紧信号,在小于安全气囊厚度时,安全带在安全气囊点爆前0.025 s触发了二级预紧,该系统输出符合系统设计的初衷。
4 结语
本文设计了一套汽车防追尾外置安全气囊预警系统并对其进行了仿真,相较于其他防追尾安全系统,其优势在于:1)采用汽车制动数学模型来对危险状况进行判定分析,其分析更明确,精度更高;2)可根据不同危险状况对驾乘人员发出不同等级的预警以及产生对安全带不同强度的约束力,实用性能更强;3)安全气囊外置且可提前点爆,防护性能更高,可对车身进行保护;4)对系统进行 CarSim与Simulink的联合仿真,验证了系统的真实可行性。
