基于水下连续波体制的捕获跟踪技术研究
2023-03-01孙大军明婉婷张居成
孙大军 明婉婷 张居成
(哈尔滨工程大学水声技术重点实验室 哈尔滨 150001)
(海洋信息获取与安全工信部重点实验室 哈尔滨 150001)
(哈尔滨工程大学水声工程学院 哈尔滨 150001)
(哈尔滨工程大学青岛船舶科技有限公司 青岛 266000)
1 引言
随着对海洋的不断探索与开发,水下潜器在民用与军事领域均有广泛应用,对水下潜器技术的研究也是水下技术的前沿与关键问题[1–4]。水下潜器进行大深度海底工作需利用声学导引完成其布放与回收工作,由于水下障碍物与近水面存在大量船只干扰时,回收过程中会存在一定的风险,因此有必要对水下潜器同时提供测量与通信信息。同时水声信道具有时变、空变特性[5],声信号经过水声信道传输会出现多普勒效应、多径效应等现象,将导致潜器回收过程中测距误差的发散速度加快,增加潜器导引的难度。针对水下测距与通信的实现方式主要有两种,时分工作方式和频分工作方式[6]。时分工作方式利用不同的时隙分别发射通信信号与测距信号进行数据处理。针对时分信号的动态多普勒,Sharif 等人[7]将发射信号封装成帧,利用帧收尾的测距信号估计接收帧的长度,从而获得接收时的多普勒系数,该方法结构简单易于实现,但多普勒估计精度依赖测距信号的精度。文献[8]在测距与通信信号中间加入单频矩形脉冲信号(Continue Wave,CW),傅里叶变换后经过Notch滤波器测量信号频率,对信号进行多普勒补偿后可获得测距与通信信息,但该方法仅适用于1帧信号时间内多普勒变化不大的情况。频分工作方式将发射端的测距与通信信号选取在不同的工作频段,在接收端经过带通滤波器后分别对测距信息与通信信息进行处理。针对频分信号的动态多普勒,Ma等人[9]采用泰勒级数展开法对频域多普勒补偿模型进行简化,提出了基于快速傅里叶变换(Fast Fourier Transform, FFT)和插值的多普勒补偿算法,但该算法计算量大,实现复杂。对于资源紧张的水下通信节点,两种信号体制不仅时效性差而且占用较多的水声带宽,无法满足水下潜器导引回收的实时需求。同时随着水下潜器技术的发展,对潜器在水下工作时间、工作效率与航行速度上均提出了更高的要求。当潜器航行速度较快时,多普勒频偏不断变化将严重影响信号的载波同步与信息恢复,上述基于时分与频分信号体制的多普勒补偿算法难以满足水下高速潜器导引回收的需求。
在无线电领域随着卫星导航理论的逐步成熟[10–16],出现了大量能够在高速背景下实现精确、快速获取定位与通信信息的算法,但遗憾的是这类算法并未在水声领域得到应用。本文借鉴卫星导航理论,构建了水下连续波体制,采用连续测距码实时调制指令信息的编码方式,实现潜器终端测距与通信信息的同步解析,压缩数据更新周期。针对水下潜器高动态需求,提出了并行结构处理的捕获技术,克服传统算法捕获时间长的缺点。采用适应水下环境的最佳环路跟踪策略,从信号跟踪输出的通信数据与参数估计精度两方面分析跟踪算法在匀速模型与变速模型下的性能。理论仿真与松花湖试验处理结果表明,基于水下连续波体制的捕获跟踪技术能够完成对高动态目标多普勒频偏变化的精确估计与动态调整,完成连续可靠的测量信息输出,提高参数估计精度。
2 实现流程
2.1 系统建模
为实现水下高效稳健地距离测量与实时准确地数据传输,系统结构框图如图1所示。构造水下连续波信号,对接收的连续信号前端进行信号并行捕获,获得信号频率和码相位的粗同步值。由于收发之间存在相对运动,相应的多普勒频偏导致载波与捕获得到的载波之间存在偏差,码相位也会随之不断变化,因此完成捕获环节后对信号进行载波跟踪和伪码跟踪。保持跟踪可实现对估计值的精确化,从而同步完成声学测量与数据传输。

图1 系统结构框图
采用的水下连续波信号是具有抗干扰与抗多径能力的直扩信号(Direct Sequence Spread System,DSSS)[17–19]。直扩信号由载波频率、数据码与测距码3部分组成,选用水下20~30 kHz频段;数据码为以二进制码流形式的定位导航信息与通信指令;测距码也称伪码,采用具有良好相关性的m序列。利用测距码调制数据信息,保障后续能够解调出通信数据的同时提供距离估计参数。信号捕获环节由于对捕获精度没有较高要求,因此如何高效快速地完成捕获是关键,本文采用了基于FFT并行结构的快速捕获技术,节约时间减小运算量。信号跟踪是对信号多普勒频率的高精度估计与补偿过程,实现稳定且准确的频率跟踪是信号跟踪的表现形式,输出通信数据码与估计参数是跟踪的最终目的。同时在理论仿真实验中,跟踪I路输出的数据码的准确性是判定跟踪是否成功的重要依据。针对信号捕获与跟踪算法将在后续详细分析。
2.2 信号捕获算法
传统的捕获算法为滑动相关算法[14],将本地伪码与接收伪码相对滑动,利用伪码良好的相关性锁定输出最大值,即为捕获到的频率与码相位值。对卫星信号而言1周期信号时间约1 ms,然而载波频率25 kHz、带宽5 kHz的水声信号1周期信号时间约25.4 ms,这远大于无线电1周期信号时间。因此水声信号采用滑动相关算法将耗时更长、计算量更大。因此提出基于FFT并行处理结构的快速捕获算法,捕获框图如图2所示,使用1次FFT和1次快速傅里叶逆变换(Inverse Fast Fourier Transform,IFFT)即可完成对某一频点的码相位的并行搜索。
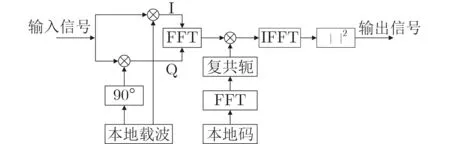
图2 信号捕获框图
通过频域相乘简化计算的相关算法,实质是利用测距码的相关性对多普勒频率与码相位的2维搜索算法,经最大值门限判决后即可输出捕获到的频率值与码相位。传统的捕获算法所需搜索次数与捕获时间[13]可表示为
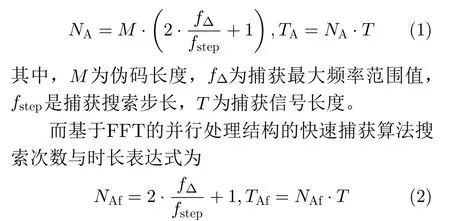
从公式来看,同一条件下基于FFT并行处理结构的快速捕获算法将捕获时间缩小了M(测距码长)倍。
2.3 信号跟踪算法
捕获算法仅能提供对频率与码相位的粗略估计,为保持对这些估计值的精确化需要对信号进行跟踪。信号跟踪基于锁相环原理,利用锁相环中的环路鉴相器输出相位误差,环路滤波器滤除环路噪声,最后通过压控振荡器对信号的频率与相位进行调整[15]。
图3所示为信号跟踪框图,信号跟踪主要分为码跟踪与载波跟踪两部分。
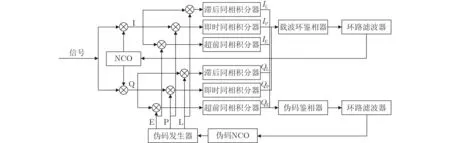
图3 信号跟踪框图
信号完成捕获后可将码相位误差控制在1个码片范围内,随着目标的运动相位误差可能超出范围导致信号丢失。伪码跟踪采用延迟锁相环(Delay Locked Loop, DLL),由本地伪码发生器产生3路输出,即滞后码、即时码以及超前码,与解调后的信号做相关,将产生6路两两正交的相关值IE,QE,IP,QP,IL,QL。将得到的相关值作为鉴相器的输入,采用归一化超前滞后鉴相器,表达式为

经过环路滤波器将相位误差反馈给伪码压控振荡器,调整本地伪码的码速率以实现码相位的跟踪。
载波跟踪环(Phase Locked Loop, PLL)采用科斯塔斯环,其鉴相器输入是本地即时码与输入信号相关积分得到的两个相互正交的积分结果IP与QP。采用二象限反正切鉴相器,表达式为
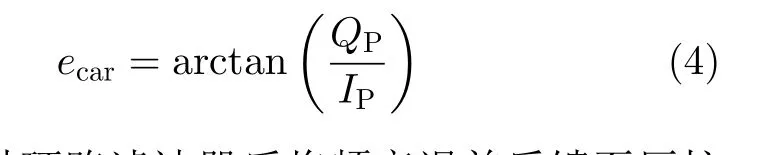
同样经过环路滤波器后将频率误差反馈至压控振荡器,调整载波频率[13]。
锁相环的阶数决定了环路动态跟踪性能,由于高阶锁相环的实现复杂性并结合水下环境与动态目标背景,本文选取2阶DLL与2阶PLL跟踪方案即可完成对动态目标的稳定跟踪,使得环路跟踪具有高效性与灵活性。2阶环路滤波器系数为
对于2阶锁相环而言,阻尼系数ζ根据经验值一般设置为0.707。环路噪声带宽Bn则是直接影响对应的环路滤波器性能的参数,它控制着进入环路的噪声量,带宽越小环路滤波效果越好,跟踪越精确。但环路带宽的选择同时需要考虑到动态背景引起的信号载波频率与相位的大幅度变化,若带宽过小将无法完成对高动态目标的跟踪。对于水下20~30 kHz频段而言,卫星的载波频率为1575.42 MHz、伪码速率高达1.023 MHz引起的多普勒动态范围下设置的环路参数经验值已不再适用。因此本文将针对水下背景,通过大量仿真实验选取最优环路带宽参数,实现对水下连续波信号的稳定跟踪。
2.4 算法误差分析
信号捕获算法是对接收信号频率和相位的粗同步过程,对捕获精度没有较高的要求。根据捕获原理相位误差在半个码片之内。频率误差主要取决于频率搜索步长,多普勒估计误差为正负半个频率搜索步长。同时步长越大,信号捕获精度越差,但步长过小,运算量变大,捕获时间变长。因此频率搜索步长的选取需要结合实际需求平衡捕获时间与捕获精度。信号跟踪算法中锁相环的测量误差源主要包括热噪声等所致的相位抖动与动态应力误差。根据文献[13]可知,载波环和码环的跟踪门限分别如式(8)、式(9)所示
测量误差均方差门限值越小,环路输出的测量值越精确,但这也降低了环路对动态和噪声的容忍度。针对信号跟踪的误差分析还需结合环路参数与实际环境进行仿真分析与验证。
3 算法仿真
3.1 信号捕获算法仿真
仿真采用连续的直扩信号,在兼顾水下传输速率与抗噪声能力的需求下测距码使用码长为127的m序列,载波频率为25 kHz,伪随机码速率为5 kHz,采样频率400 kHz,信噪比为5 dB。
信号捕获时需保证频率的搜索范围内包含高动态背景下的最大多普勒频移值。针对卫星GPS的频率捕获,搜索频偏范围一般设置为[–10 kHz,+10 kHz],频率搜索步长为500 Hz,卫星捕获所需时间约为51 ms[16]。但水下可用频段限制了水声信号传输速率的同时也影响了捕获所需时间。潜器回收对接时航行速度一般较慢为4~6 kn,潜艇最快航行速度可达到25 kn[2]。因此水声环境中多普勒频偏搜索范围为[–250 Hz , +250 Hz]。平衡捕获时间与捕获精度后,采用频率步长为20 Hz。当初始时延值为2.5ms,收发相对速度为12 m/s时,理论计算可知信号载波偏移200 Hz,码速率偏移40 Hz,对1周期25.4 ms信号进行捕获可得结果如图4所示。
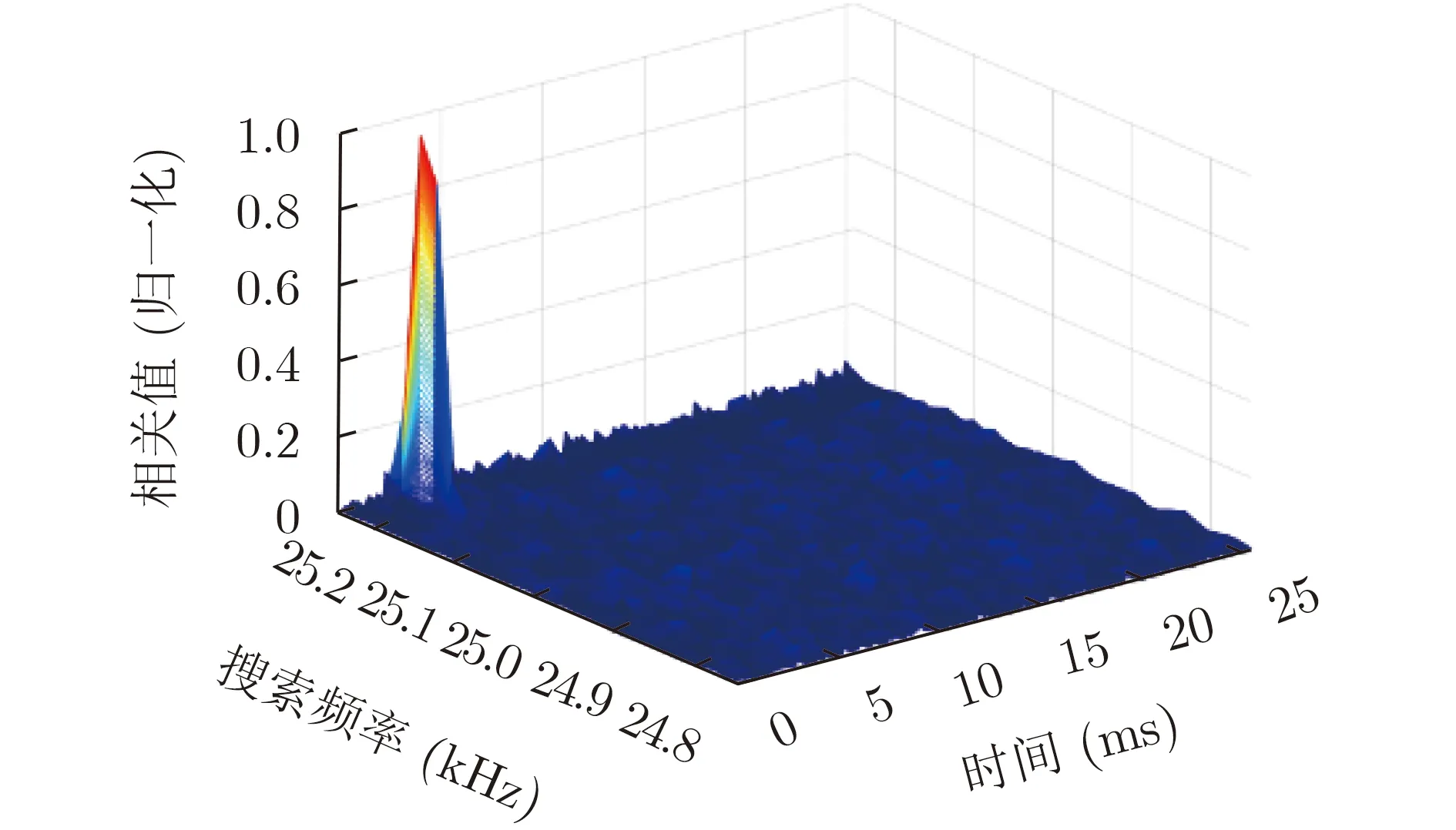
图4 信号捕获结果
仿真实验中选取最大值为捕获结果,因此信号捕获频率为25.21 kHz,真实频率为25.2 kHz,则捕获频率误差为10 Hz。捕获到的码起始位置即初始时延值为2.453 ms,理论设置时延值为2.5 ms,此时捕获时延误差为0.047 ms。捕获本身就是对信号参数的粗估计,对精度的要求不高,仿真结果表明频率捕获精度恰好为半个频率搜索步长10 Hz,码相位捕获精度在理论值误差值半个码片0.1 ms范围内。在传统算法基础上如何节约捕获时间,减小运算量是捕获技术的优化重点。采用FFT并行处理算法可压缩数据捕获时长,将仿真设置参数代入式(1)、式(2)可得捕获所需时间约为0.66 s,而传统的捕获算法则需要83.87 s。从运算量上看,时域算法运算需要1 2 7(测距码长) ×2 6(捕获频率次数)=3302 次。而并行处理结构下的捕获算法仅需要运算3(FFT变换次数)× 26(捕获频率次数)=78次,计算次数缩减为时域算法的2.36%。因此基于FFT并行处理结构的捕获算法的处理速度明显优于传统的捕获算法。
3.2 信号跟踪算法仿真
仿真采用连续的直扩信号,测距码为码长127的m序列,载波频率为25 kHz,伪随机码速率为5 kHz,采样频率400 kHz,信噪比为5 dB。基于信号捕获输出的载波频率与码相位的粗估计值,利用归一化超前滞后鉴相算法和延迟锁相环原理实现对码相位的跟踪,利用二象限反正切鉴相算法和科斯塔斯环原理实现对载波的跟踪。针对环路带宽的选择,需要同时考虑环路稳态误差与目标的动态范围。针对水下潜器回收时加速度较小,但航行速度较快的情况提出两种水下目标典型动态模型—匀速模型(多普勒频率不变)和加速度模型(多普勒频率变化),通过大量理论仿真实验确定环路带宽参数的最佳值,并从数据传输能力与参数估计精度两个方向,实现对信号跟踪性能的定量分析。
(1)匀速模型。仿真收发相对速度为12 m/s的匀速运动场景,此时多普勒频偏为固定值200 Hz。由于信号捕获环节将载波多普勒频移的误差限制在了10 Hz内,载波环路带宽可选择较小的值,使得环路拥有较小的稳态误差。然而码速率也会随之变化,但捕获环节仅捕获码相位初始值,并未对码速率偏移值进行补偿,因此高速环境下需要设置相对较大的码环路带宽以适应动态范围。仿真码环路带宽为14 Hz,载波环路带宽为5 Hz和15 Hz两种情况下的跟踪结果。
如图5、图6所示为跟踪输出结果,图5中I路输出为数据码信息,证明算法能够做到准确无误地跟踪。图6表示跟踪输出的连续测时值,当数据码中含有发射时刻信息时即可达到连续测距功能。如图7所示,当载波环路带宽变化时,不影响码环路跟踪结果与信号解码,图7(b)为不同载波环路带宽下跟踪频率对比图。对于匀速模型,载波跟踪不需要较大的载波环路带宽,载波跟踪环路带宽越大,稳态误差越大。当速度为12 m/s,载波环路带宽为5 Hz时,由式(10)可得在不计相位抖动均方差的情况下,动态应力误差为0°,小于跟踪门限45°,所以锁相环理论上可保持对信号的持续跟踪,仿真中跟踪的载波偏移值如图7(b)所示,理论偏移值为200 Hz,计算可得仿真中频率跟踪均方误差为0.012 Hz。
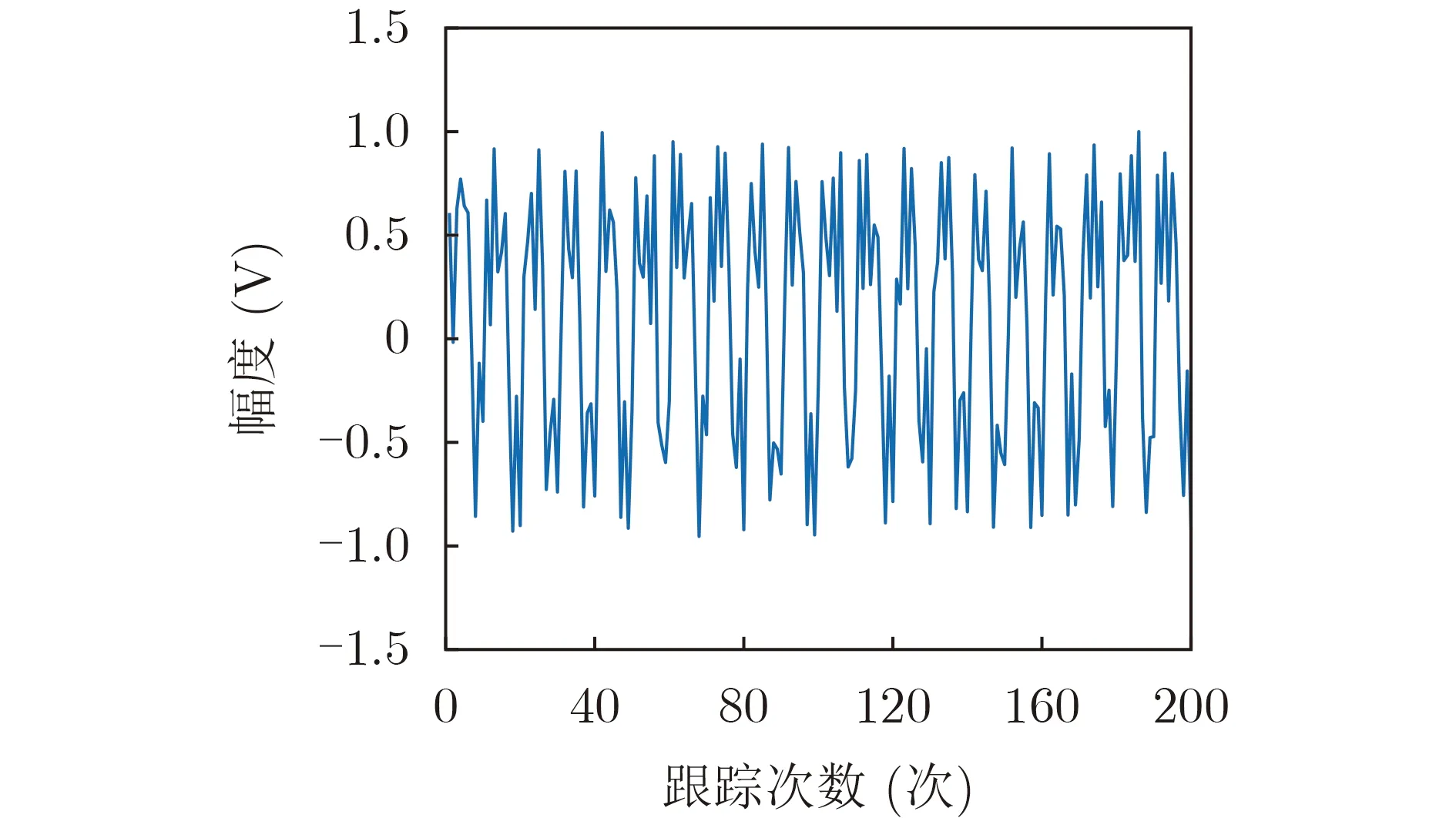
图5 跟踪I路输出
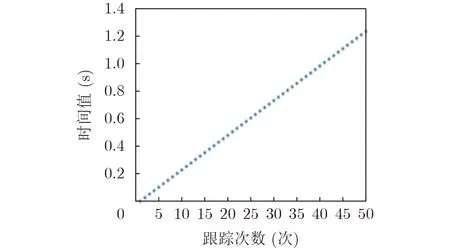
图6 连续测时
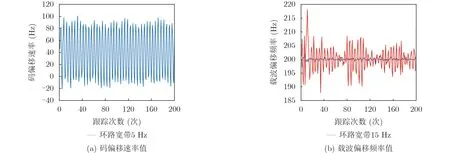
图7 跟踪的多普勒偏移值
(2)加速度模型。图8、图9仿真了收发相对速度为0~15 m/s的变化情况,即加速度为固定值0.03 m/s模型。通过大量仿真可得最佳环路参数:码环路带宽为3 Hz,载波环路带宽为9 Hz。
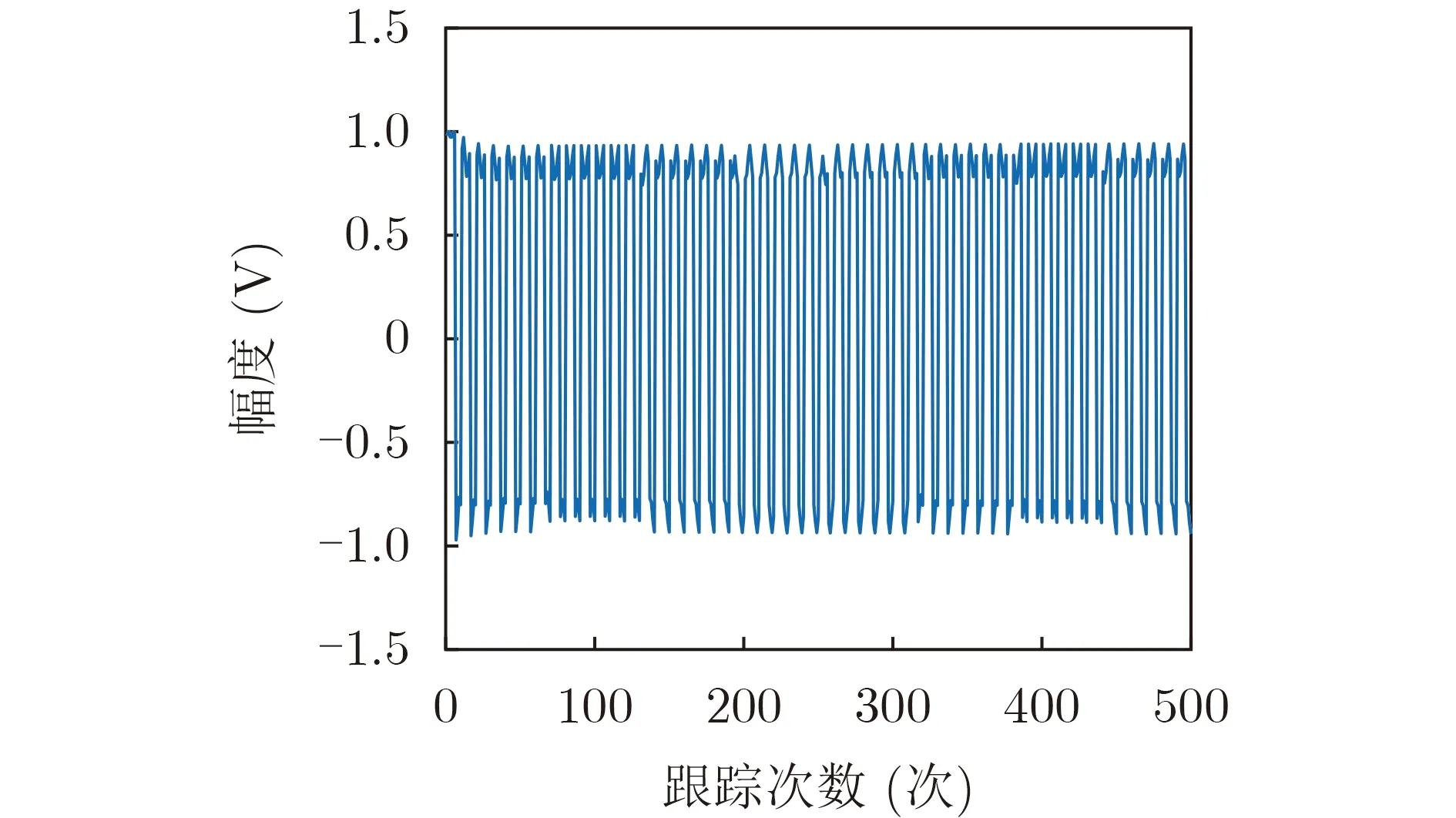
图8 跟踪I路输出
图8代表了跟踪I路输出结果,经判决后即可获得数据码信息。图9所示为信号跟踪输出的连续测时结果,图10为信号跟踪的码速率与载波频率偏移值。由算法误差分析可得加速度为0.03m/s2模型下的动态应力误差为0.07 Hz,在不计相位抖动均方差的情况下误差值小于门限值45°,因此仿真所得稳态误差值1.01 Hz在跟踪门限范围内,信号达到稳定跟踪。由此可见在最优环路策略的设计下针对加速度模型依旧能完成准确无误的解码,但误差值略大于匀速模型时的跟踪结果。图11所示为根据信号跟踪所得的速度与实际速度对比图。
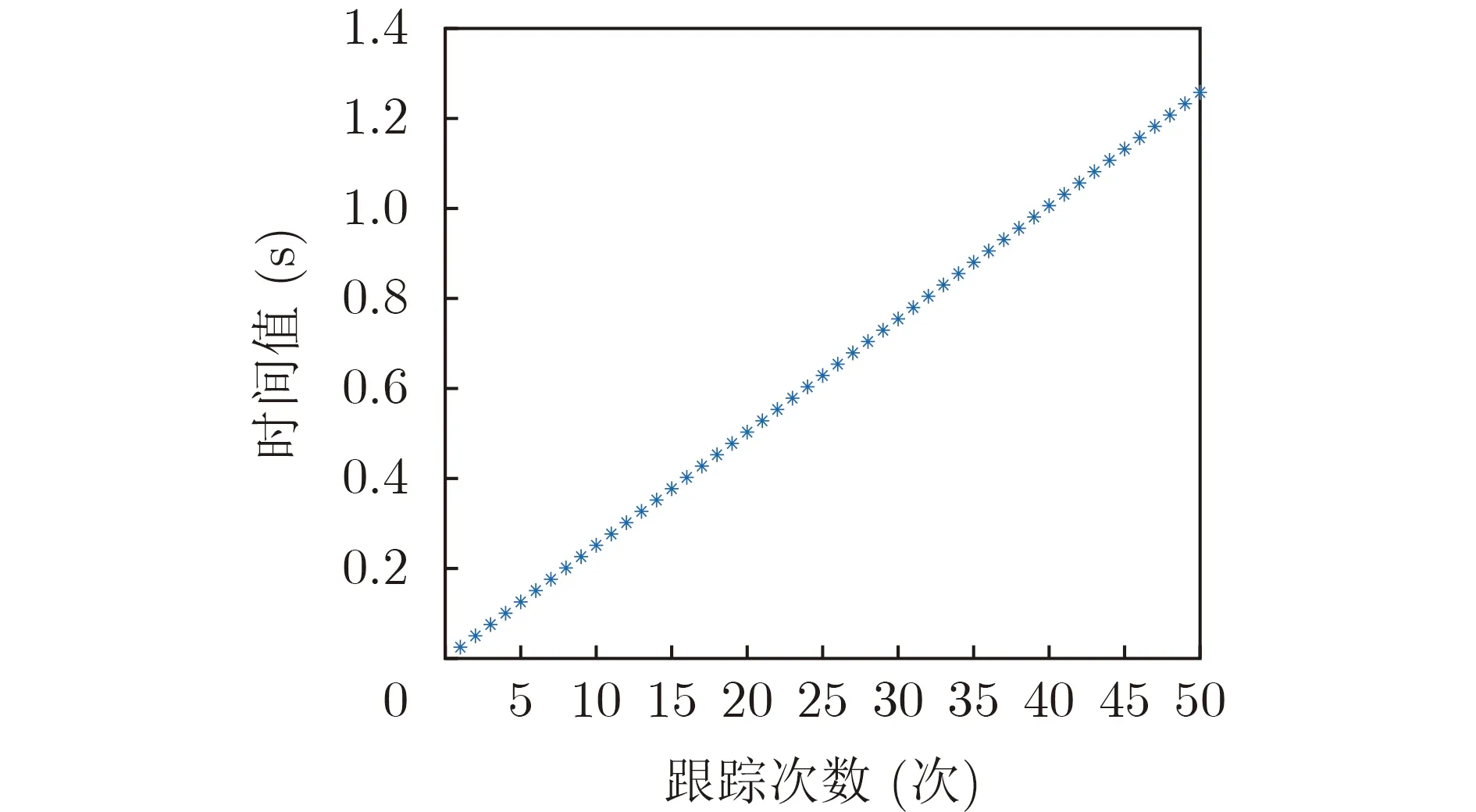
图9 连续测时
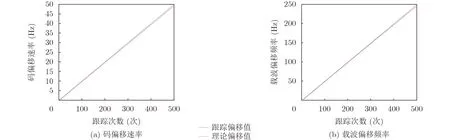
图10 跟踪的多普勒偏移值
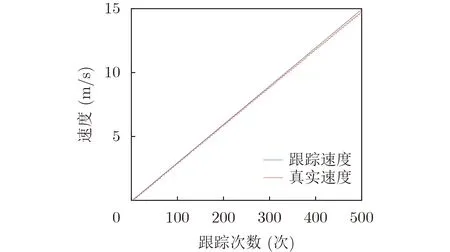
图11 跟踪速度与真实速度对比图
由图11可见信号跟踪也实现了对相对速度的测量。基于跟踪结果可对目标进行实时测距,图12所示为不同速度时信号跟踪后的时延检测与正常相关峰时延检测精度[20]对比图。仿真结果表明,随着速度的增大,正常相关峰检测时延误差呈线性增大,基于信号跟踪结果的参数估计误差随速度变化缓慢,且在高速模型下,即v=15 m/s时估计误差仅0.025 ms,远小于相关估计误差1.425 ms,精度得到极大的提高。因此该算法在高动态环境中更能发挥作用,提高测距精度。综上所述信号跟踪不仅能够完成准确的数据传输,经信号补偿后还可以完成更稳健的时延检测,为水下测距提供了高精度保障。

图12 时延检测精度对比图
4 湖上试验数据处理与结果分析
2021年6月在吉林省吉林市松花湖区域进行了试验。在岸边信号源连接发射换能器,船上放置接收换能器,连接功率放大器与采集器。收发换能器入水深度3 m,水平距离约20 m。船围绕发射端沿半圆轨迹行驶,而后船掉头重新沿半圆轨迹行驶。图13、图14所示分别为松花湖声速剖面与信道结构,由此可见湖试环境为多途环境,发射连续的直扩信号,能够达到抗多途效果。此时测距码为码长127的m序列,载波频率为25 kHz,伪随机码速率为5 kHz。接收端采集器采样率400 kHz,连续接收50 s信号。对接收的前1周期25.4 ms信号进行基于FFT并行处理结果的快速捕获,结果如图15所示,湖上试验数据捕获的频率为24.99 kHz,码起始时刻为11.1 ms。捕获所需时间仍为0.66 s,远小于传统捕获所需时间。
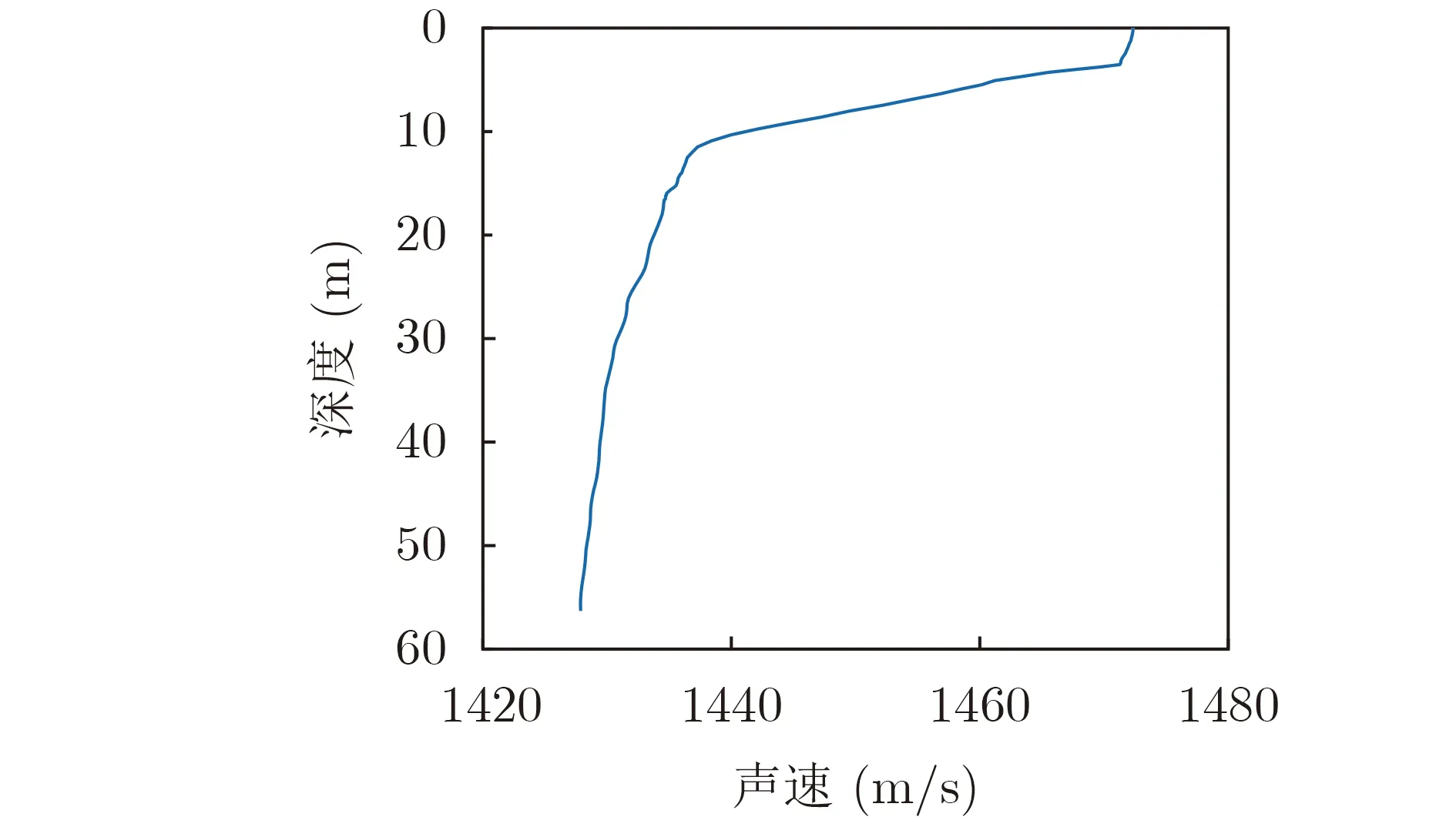
图13 松花湖声速剖面

图14 松花湖信道结构
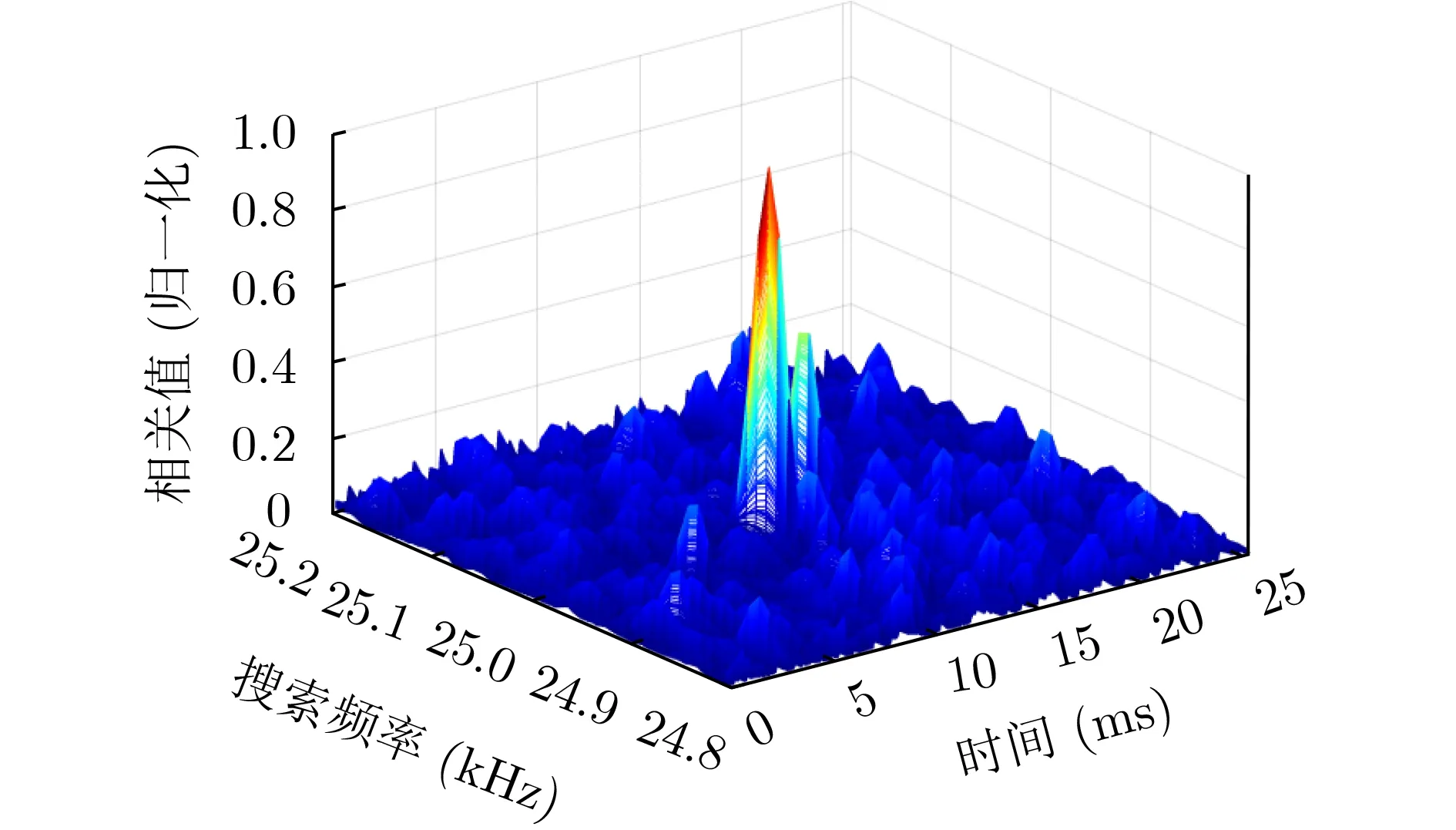
图15 松花湖数据捕获结果
基于捕获的粗估计值,采用2阶DLL与2阶PLL的环路策略,跟踪信号2000次,实际试验环境虽比理论仿真环境更为复杂,但相对运动仍属于变速运动模型,因此根据加速度模型仿真的环路参数设置,码跟踪环路带宽为3 Hz,载波环路带宽为9 Hz。经过信号跟踪算法后输出的支路信息如图16所示。
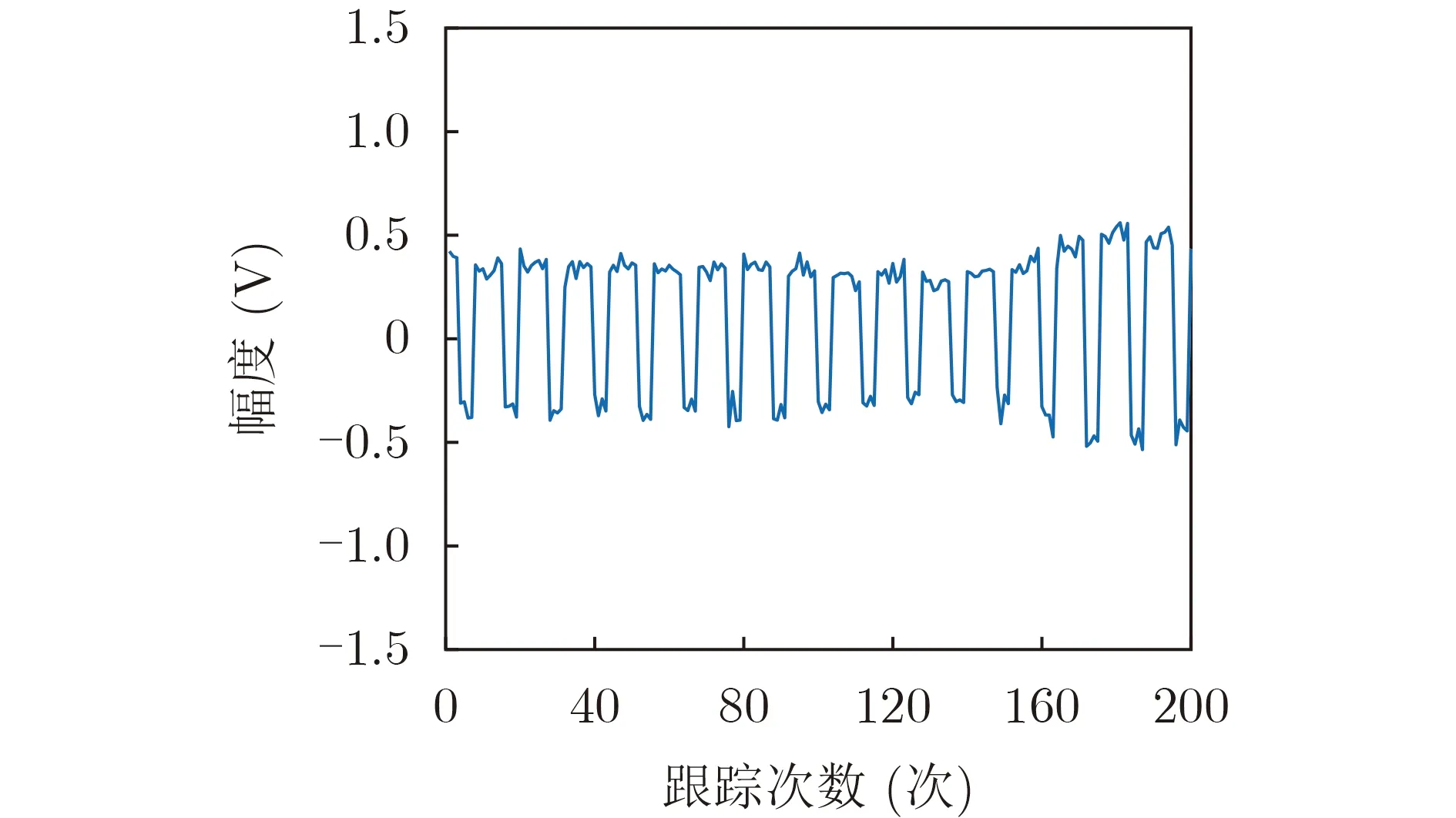
图16 松花湖跟踪I路输出
经验证输出的I路信息为准确无误的数据码信息,则认定信号跟踪成功,即完成了对载波频率与码相位的锁定。跟踪过程中可得到连续测得的时间值如图17所示,当数据码中包含发射时间信息时,则连续波在多途环境下将准确无误地完成了连续测距与通信。输出多普勒跟踪结果如图18所示。
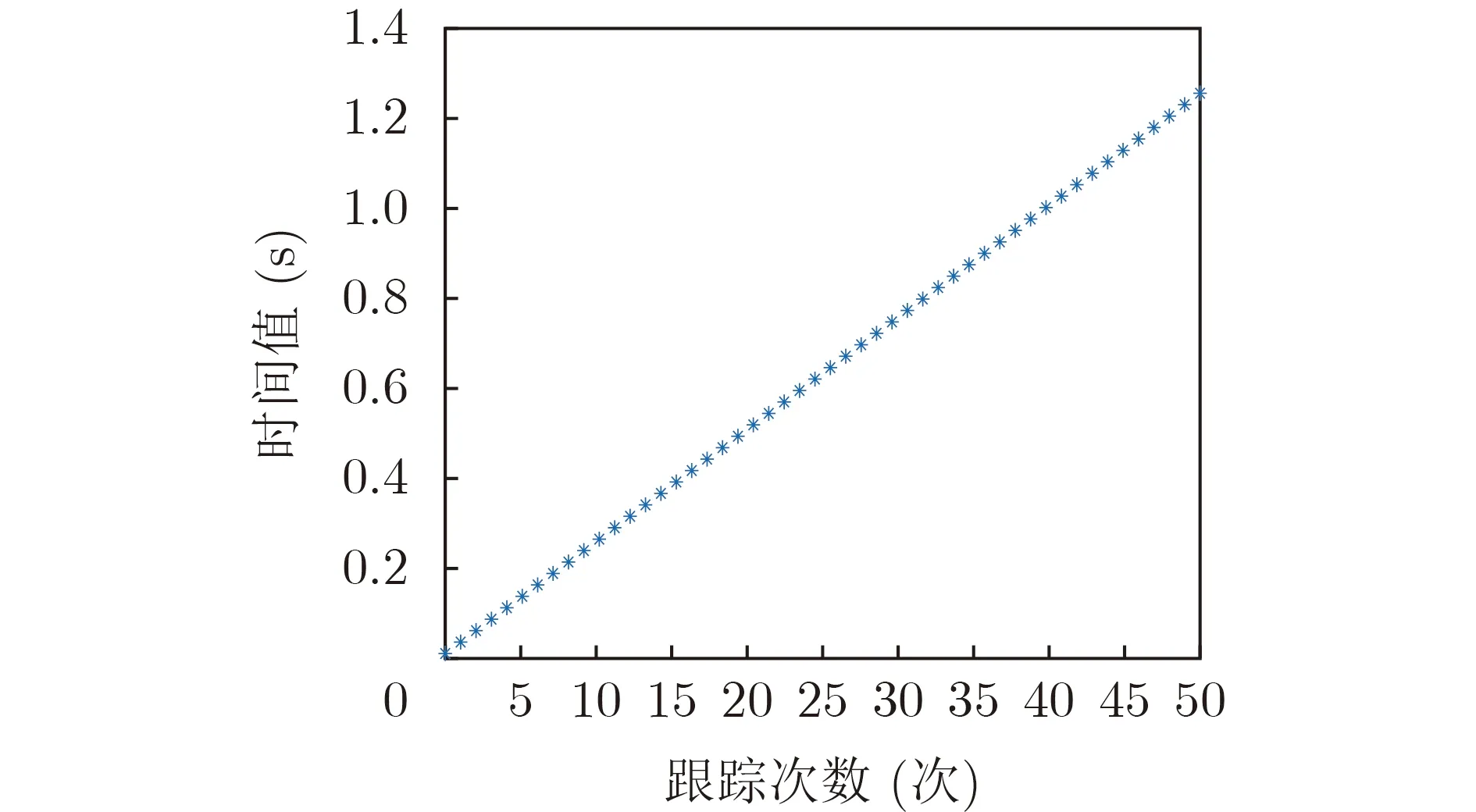
图17 连续测时
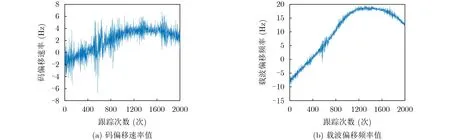
图18 松花湖数据跟踪结果
由此可见收发之间相对运动为不规则的变速运动。同时根据信号跟踪中鉴别器输出相位误差的原理,可得到码鉴别器误差值为0.77 Hz,载波鉴别器输出误差值为0.14 Hz。随着船运动接收信号的多普勒实时变化,松花湖试验数据的处理结果证明了跟踪环路在高动态信号背景下仍可以快速收敛且具有较小的跟踪误差,同时能够完成对声学通信信号的解码,高帧率的参数估计也为水下高精度测距提供了保障。
5 结束语
针对水下潜器回收的实时性测量与指控需求,本文构建了水下连续波信号体制,为满足水下高速潜器的快速解算信息的需求,提出了基于FFT并行结构处理的快速捕获算法,将捕获时间由传统方法的83.87 s缩短至0.66 s,计算量缩小为时域算法的2.36%,大大提高了捕获处理速度。信号跟踪算法利用归一化超前滞后鉴相算法和延迟锁相环原理实现对码相位跟踪,利用二象限反正切鉴相算法和科斯塔斯环原理实现对载波跟踪。经过理论仿真确定了适用于水下环境与动态目标环境的最佳环路策略,并且信号跟踪技术在匀速模型、加速度模型以及松花湖试验中,均能做到在通信方面准确无误地解码;在参数估计方面,基于跟踪结果的时延估计精度在不同速度下均优于传统的相关时延检测精度,且速度越快算法的优势越明显。但本文暂未对加加速度模型进行相应分析,未来将继续深入研究。综上所述本文提出的基于水下连续波体制的捕获与跟踪技术能够实现水下高速潜器的实时导引与回收过程,为潜器调控航行参数提供实时信息支撑。
