实景三维模型精细化技术研究与实践
2023-03-01杜亚明陈昊宇
杜亚明 陈昊宇 李 雁
(江苏省测绘工程院,江苏 南京 210013)
实景三维是新型基础测绘标准化产品,具有直观、精度高、可量测、信息丰富、沉浸感强等特点,是新型智慧城市建设和“新基建”推进实施的重要新型空间数据基础。无人机倾斜摄影具有测绘尺度大、飞行效率高、机动灵活等优势,可以快速准确地获得高质量航空摄影数据。借助智能化的控制系统和高性能的数据处理集群,可以进行高效数据采集与实景三维模型数据生产,现已成为主流的实景三维模型生产方式[1-2]。
由于城市环境、地形以及航摄的局限性,航摄影像直接生成的三维模型会产生缺损、破洞、纹理拉花等问题[3-4]。为构建高精细化的城市模型,弥补倾斜摄影自动建模的不足之处,文章采用空地影像联合三维建模、三维模型编辑修饰、人工构建单体化模型等三种方法提升模型精细程度。
1 无人机倾斜摄影
无人机倾斜摄影系统主要包括地面站系统、无人机飞行平台、传感器三个部分。地面站系统负责无人机航线规划、飞行检查、飞行状态监测、应急情况处理等。无人机飞行平台主要负责搭载传感器进行数据获取,常用飞行平台有多旋翼、固定翼、垂起固定翼等。倾斜摄影用的传感器多为五镜头相机,配合无人机POS系统,能够同时获取一个正射影像与前后左右四个方向的地面影像。
依托省级基础测绘项目,于2021年在镇江市中心区获取了102 km2的倾斜摄影数据。项目采用纵横CW-15无人机搭载睿铂RIY-DG4 Pros五镜头相机进行数据采集。无人机累计飞行43架次,获取照片464 835张,以倾斜摄影三维模型为基础,于镇江市市政府、镇江市体育会展中心、镇江市苏宁广场、金山风景区、西津渡风景区等区域,利用大疆御2Pro以及M300多旋翼无人机贴近摄影,获取高分辨率影像数据,并进行精细化三维重建。
2 三维模型重建技术
三维建模的关键技术包括数据预处理、空中三角测量、多视影响匹配、纹理映射等。三维建模前期数据预处理主要包括航空影像、相机检校参数、POS数据、控制点数据等内容的预处理。空中三角测量是通过少量的室外控制点采集,经过严密计算和室内加密,从而获得加密点的平面位置和高程值。多视影像匹配是通过算法获得具有一定重叠度的航空影像数据之间的同名点的过程。纹理映射是指利用计算机图形学将二维图像覆盖到三维物体表面来增强真实感的技术。项目利用Context Capture软件进行实景三维数据生产。
2.1 数据预处理
对航摄获取的原始影像、POS数据以及相机的检校参数文件进行预处理。对原始影像进行规范化命名并检查影像,保证数据无遮挡、非全黑、色彩正常以及文件中信息有效。对POS数据检选有效信息,确保记录信息与影像名称逐一对应。确保相机检校参数信息与设备对应。
2.2 空中三角测量
在Context Capture软件中依次导入预处理后的数据。设置正确的地理参考,以POS数据作为初始值,对整个区域网中影像点进行匹配与模型连接。必要时进行手工量测连接点,确保自由网空中三角测量成果满足质量要求。随后对外业实地测量的控制点进行转次,选择无遮挡、特征清晰的影像作为目标相片。利用控制点数据对区域网模型进行约束平差解算,直至空三各项指标满足质量要求。
2.3 三维模型构建
在Context Capture软件平台下,利用倾斜影像数据及空中三角解算后影像精确的内、外方位元素进行多视影像密集匹配,得到密集地表三维点云。基于已定向的密集三维点云,构建不规则三角网,得到三角网表面模型(白模),利用倾斜影像及精确的内、外方位元素确定物方与像方的几何关系,对白模进行自动纹理映射,得到倾斜摄影三维模型。
3 实景三维模型精细化
为解决倾斜摄影自动建模的模型问题,获得使用性更广的高清晰度、精细化实景三维模型。结合空地影像联合三维重建的方式优化城市三维模型建筑物的近地面位置的三维结构与纹理,利用三维模型修饰的方式修补水面漏洞、建筑物侧立面凹凸扭曲,解决悬浮物以及纹理拉花等问题,通过人工模型单体化的方式优化模型展示效果。
3.1 空地影像联合精细化实景三维建模
贴近摄影是模型精细化必不可少的手段之一。利用地面补拍以及无人机绕飞获得精细纹理以及位置信息恢复被摄物体的精确坐标以及精细结构,实现“从无到有”“从粗到细”[5-6]。
(1)影像采集策略。利用垂直起降固定翼无人机搭载五镜头倾斜相机获取测区全范围影像数据;利用多旋翼无人机搭载五镜头相机对建筑物较低的区域进行补拍,获取更高分辨率的影像数据;对于重点建筑物以及重点目标区域,利用多旋翼无人机贴近环绕的方式获取多角度,多细节的高分辨率影像数据。依据建筑物特点以及现场实际情况,采取多层次、多角度、高重叠度的贴近摄影方式,在建筑物转角以及相邻环绕层之间应增补拍摄,保证影像匹配成功率,同时保证贴近摄影与倾斜摄影地面影像之间的重叠度,保证与控制点成功连接。
(2)空地影像融合空三。
空地影像联合三维重建技术流程如图1所示。

图1 空地影像联合三维重建技术流程
由于贴近摄影时的POS误差较大,将倾斜摄影数据与地面贴近摄影数据联合时,空三常因为拍摄尺度与拍摄角度差异过大出现匹配错误,无法获得正确的满足质量要求的空三成果。将不同级别的数据独立空三,在倾斜摄影的成果上选取清晰的连接点并在地面贴近摄影的数据上进行转次,将空地影像分别空三的结果进行区块合并,利用地面控制点数据将融合后的整体纳入地面坐标系当中。
(3)空地影像融合模型构建。常规建筑物三维模型效果与空地影像联合处理后三维模型效果如图2、图3所示。

图2 常规建筑物三维模型效果
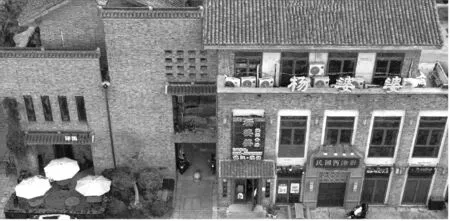
图3 空地影像联合处理后三维模型效果
将融合后的密集点云数据提交至Context Capture平台中,经过TIN三角网构建、三角网平滑优化、纹理优化与映射、标准格网分割模型等步骤后,生成空地影像融合后的实景三维模型。空地融合后的模型在分辨率、建筑物结构、建筑物表面纹理细节等方面均有提升,效果更加真实,更加接近建筑物实际中的形象。
3.2 实景三维模型修饰精细化
倾斜摄影自动构建的实景三维模型存在较多不足,为提升模型美观程度以及可应用性,对实景三维模型的后期编辑修饰十分必要[7-8]。DP-Modeler是一款可以对三维模型进行后期修饰的软件。利用软件内工具可以实现对OBJ、OSGB格式的实景三维模型编辑修饰,通过导入空三文件以及原始影像数据,能够对人工编辑后模型纹理的重新映射。
(1)水面修补。水面模型由于空三匹配不能生成密集点云会产生大量空洞或凹凸不平,导致水面四周的纹理颜色不均。通过DP-Modeler软件,删除水面四周模型碎片,将水面模型填补完整,通过Photoshop软件进行纹理编辑,生成完整、平滑、纹理过渡自然的水面模型。
(2)面平整以及纹理修改。平整的道路因为移动中的车辆产生不完整的车辆模型。大型屏幕广告牌因为画面的变动导致模型表面纹理失真。建筑物的侧立面常因为遮挡等因素出现结构扭曲、纹理拉花等现象。通过对扭曲平面的压平处理可以将异常扭曲恢复,选择合适角度的相片重新映射纹理,恢复道路、广告牌、建筑物侧立面的真实样貌。
(3)模型碎片及悬浮物删除。常规倾斜摄影实景三维模型如图4所示。
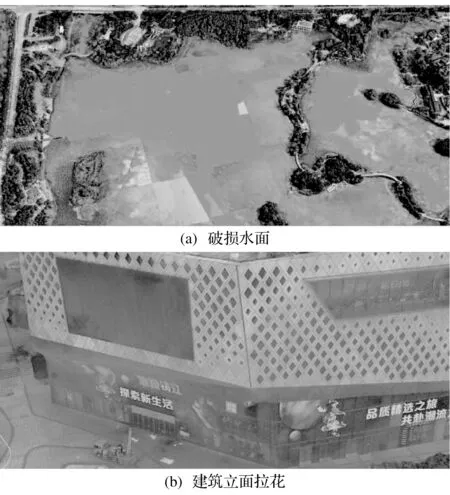
图4 常规倾斜摄影实景三维模型
较细的杆状物体或结构复杂、重复结构较多的物体在空三匹配生成密集点云时没有匹配出足够多的点,在生成模型时成为悬浮物。常见的悬浮物有单颗林木、路灯、小型高压线塔、小型镂空建筑等。空三匹配出现错误点云时也会在整体模型的下方以及空中出现模型碎片,严重影响三维模型观感。利用DP-Modeler可以删除模型中的碎片以及悬浮物。
3.3 实景三维人工模型精细化
实景三维模型基于影像特征点提取与匹配实现模型建立。当建筑物表面为大型反光面或建筑物为结构复杂的镂空结构时,利用倾斜摄影自动构建的三维模型效果不够理想。利用人工构筑单体化模型可以提升模型的精细化程度,拓宽模型的应用场景[9]。
人工构筑单体化模型是在已经生成的实景三维模型的基础上,利用软件在三维测图环境下进行建筑物特征点线量测,实现精细模型的结构化重现。包括房顶、楼体、底商、女儿墙、开放阳台、屋顶重要装饰、台阶、楼梯、天窗、水箱、发射塔、烟囱等部件。
人工修饰精细化实景三维模型如图5所示,人工单体化模型构建流程如图6所示。
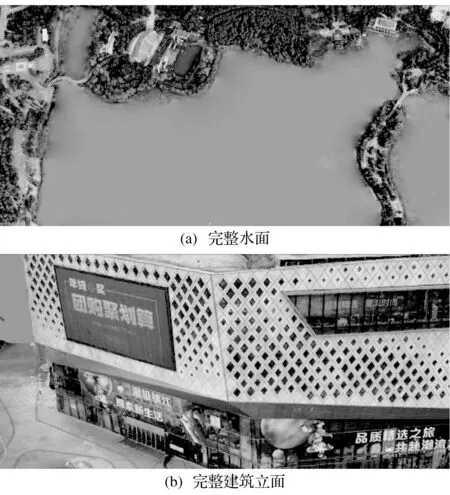
图5 人工修饰精细化实景三维模型
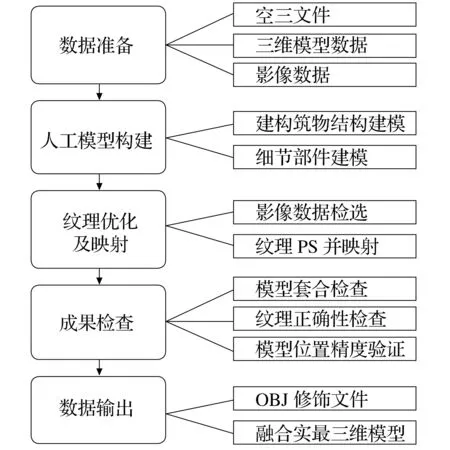
图6 人工单体化模型构建流程
针对已经构筑完成的单体化模型进行纹理映射以及纹理修编,可采用的纹理包括倾斜影像、无人机贴近摄影影像、相机地面人工补拍影像等。选择清晰度高、颜色相近、无树木公共设施遮挡的影像进行贴图。对纹理映射与修编后的模型进行套合检查与精度验证,移动单体化模型保证其完美套合,检查其位置精度,确保满足项目需求。
4 结语
地理信息数据由二维向三维快速发展,基于倾斜摄影的实景三维成果优势较为明显。自动构建的三维模型仍然存在部分问题。文章探索了贴近摄影数据和倾斜摄影数据相融合的方法,成功实现了对局部模型精细化处理的效果。因倾斜摄影与贴近摄影的时相差异导致影像数据颜色差异较大,因此对于融合前的影像匀光匀色至关重要。贴近摄影时无人机的POS精度不高,在后续对贴近摄影进行空三加密以及两套空三成果融合时,需转刺同名点,投入的人工与时间较多。三维模型的后期编辑、修饰以及人工模型的构筑工作量大,效率较低。对于较大范围区域的城市级三维模型精细化,需在精细化效果与工作量平衡。
