卧式下肢康复机器人训练模式设计与轨迹规划
2023-02-28赵金鹏韩建海李向攀郭冰菁
赵金鹏,韩建海,2,李向攀,2,郭冰菁,2
(1 河南科技大学机电工程学院,河南 洛阳 471003;2 河南科技大学河南省机器人与智能系统重点实验室,河南 洛阳 471023)
0 引 言
由于人口老龄化和人们生活节奏的加快导致脑卒中患者日渐增多,超过70%的脑卒中引起的下肢运动功能障碍患者需要进行运动康复训练,然而国内专业康复医师不足5 万,这就导致很多患者无法及时接受有效的运动康复治疗[1-2]。 同时,传统的康复治疗效果很大程度上依赖于康复医师的个人经验,治疗的力度和效果难以保证[3]。 因此,将现代机器人技术与康复医学相结合,研制康复医疗机器人来协助康复医师对患者进行康复治疗成为了康复领域的研究热点[4-6]。
下肢康复机器人根据其结构不同,可分为外骨骼式和末端牵引式两大类[7]。 其中,外骨骼式机器人普遍体积较大、穿戴不便且价格较为昂贵,如朱志伟等学者[8]研发的下肢外骨骼机器人。 末端牵引式机器人具有结构简单、体积小、操作方便且康复效果较好等一系列优点,因此国内外研究人员做了大量的研究[9]。 在国外,Swortech SA 公司推出的Motion Maker 坐卧式下肢康复机器人可以对髋膝踝三个关节进行康复训练[10]。 在国内,王洪波团队设计的坐式下肢康复机器人,结构上采用了空间四自由度串并联的方式,可实现对髋、膝关节的协同康复[11]。 但这些康复机器人所能实现的康复动作有限,在一定程度上限制了机器人的适用范围。
为满足人体下肢髋膝踝关节的康复训练以及柔顺性需求,本文将康复医学理论与现代机器人技术相结合提出了卧式下肢康复机器人,并根据患者的个性化需求设计了多种康复训练模式;运用S 形轨迹规划原理对康复轨迹进行实时仿真,同时结合实验验证机器人结构以及康复模式设计的合理性。
1 机器人本体结构设计
卧式下肢康复机器人主要由基座、大腿部、小腿部与脚部等组成,其三维模型如图1 所示。 图1 中,(a)为正视图,(b)为俯视图。 脚部在空间中的位置由髋关节和膝关节的运动确定,脚部在空间中的姿态由踝关节的运动决定,并且各个关节都是通过交流伺服电机搭配减速器来驱动的[12],髋、膝和踝三个关节的配合运动可实现机器人脚部末端在三维空间中的运动。
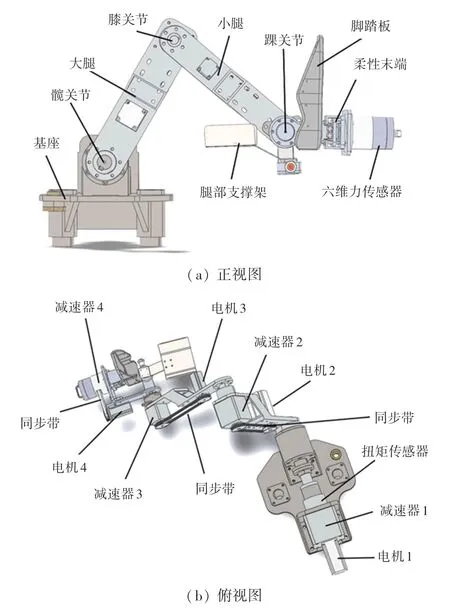
图1 机器人三维模型图Fig. 1 Three dimensional model of the robot
电机1 和减速器1 配合使用被安装在基座上,电机1 和减速器1 的旋转带动髋关节进行运动,并配备扭矩传感器实时监测轴1 的扭矩情况。 同时为了减小机器人的体积,使运行过程更加平稳安全,电机2、3、4 都采用带传动将动力传递给减速器、继而带动关节转动的方式。 电机2 安装在机器人大腿上,其旋转运动经过带传动传递给减速器2,从而带动膝关节进行摆动。 电机3 安装在小腿上,电机4通过电机安装支架安装在脚旁。 减速器3 与减速器4 相互垂直安装,电机3 的旋转运动通过带传动传递给减速器3、从而带动踝关节进行跖屈和背屈运动,并同时确定人体脚部在空间中的姿态,电机4 和减速器4 控制踝关节的内收外展和人体下肢的内旋和外旋。 同时,在脚跟部设计安装了一个柔性末端,其三维图如图2 所示,该柔性末端水平面由4 根导杆和4 根弹簧组成,垂直面由2 根导杆和2 根弹簧组成,从而在机械上保证康复过程的被动柔顺性。制作的物理样机如图3 所示。
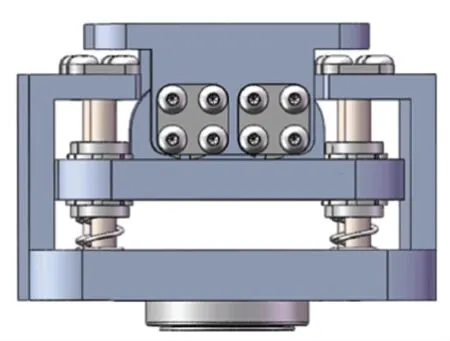
图2 柔性末端三维图Fig. 2 Three dimensional drawing of flexible end
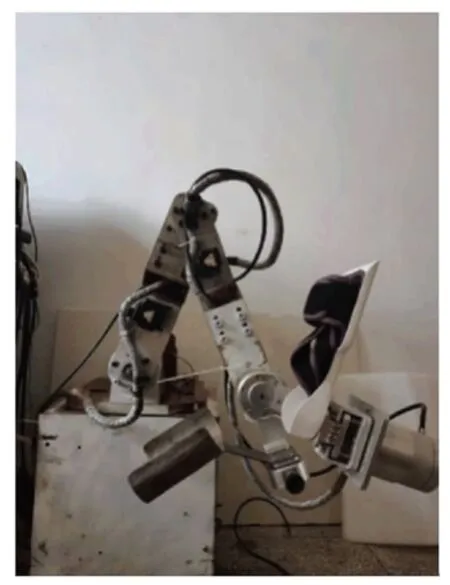
图3 机器人物理样机图Fig. 3 Physical prototype of the robot
机器人通过伺服电机驱动来使下肢功能障碍患者完成不同的康复训练模式,采用北京灵思创奇科技有限公司的半实物仿真平台作为机器人的控制系统,进行康复机器人的实时控制和数据采集。
2 运动学建模分析
采用D-H 参数法确定各个关节变量之间的关系,并建立机器人的连杆坐标系,如图4 所示。 旋转关节θ1定义为基座水平方向与大腿的夹角,旋转关节θ2定义为大腿与小腿的夹角,旋转关节θ3定义为小腿与水平面的夹角。

图4 机器人连杆坐标系Fig. 4 Robot linkage coordinate system
为确保所设计的卧式下肢康复机器人满足大多数患者的使用要求,结合正常成年人下肢各部分尺寸[13]与机构运动学原理,设计了各连杆的具体参数,取L1=360 mm,L2=360 mm,同时为保证康复训练过程中的安全性,对旋转关节变量θ1和θ2的取值范围分别限制为30°~75°和40°~100°,D - H参数见表1。

表1 机器人D-H 参数表Tab. 1 D-H parameters of the robot
对所设计的卧式下肢康复机器人进行运动学分析,探究机器人末端脚部位姿与各个旋转关节变量之间的联系[14]。 由于在本结构中踝关节只决定末端的姿态,所以要单独考虑,因此只需求出脚部的位姿矩阵0T2:
其中,式(1) cθ =cosθ,sθ =sinθ。
根据上式计算得到的齐次变换矩阵0T2,因此机器人末端位置为:
机器人的空间位姿矩阵R为:
通过对机器人运动学求逆解可得:
将在Solidworks 软件中绘制的三维模型装配实体使用Simscape Multibody 工具箱导入到Matlab 的Simulink 中搭建卧式下肢康复机器人模型,如图5所示。 通过设置各个关节的弹性以及阻尼来更好地模拟卧式下肢康复机器人的实际工作情况,尽可能地使仿真更加贴合实际。
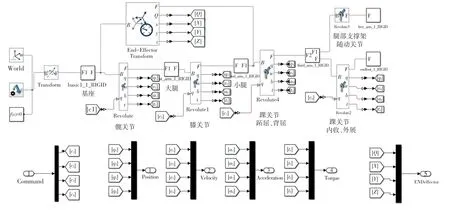
图5 下肢康复训练机器人机构模型图Fig. 5 Mechanism model of lower limb rehabilitation training robot
3 康复训练模式的设计
人体下肢的一切复杂运动都主要由髋、膝、踝三个关节的复合运动构成,由于下肢功能障碍患者的患病形式多种多样,所以需要设计出既可以满足各种下肢康复需求并且又具有一定针对性、个性化的康复训练模式。 本文根据成年人人体下肢髋、膝、踝关节的运动范围(见表2),结合相关康复护理和机器人技术特点,设计出了多种躺卧姿势下的人体下肢康复训练模式。
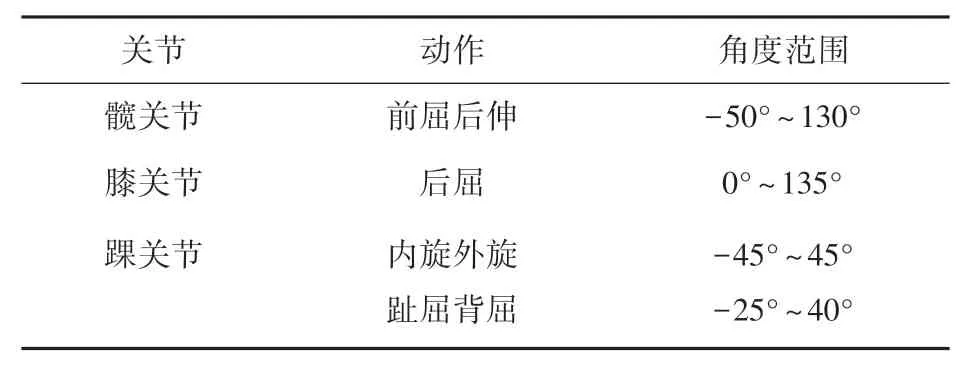
表2 人体下肢髋膝踝关节的运动范围Tab. 2 Range of motion of human lower limb hip,knee and anklejoints
一般定义髋关节的角度为人体大腿的轴线与其水平面之间的夹角,膝关节的角度为人体大腿轴线与其小腿轴线之间的夹角,踝关节的角度分布在空间中的2 个相互垂直的平面,分别为跖屈、背屈的角度和内收、外展的角度。 在实际康复训练中,要根据每位患者的个性化需求选择各个关节合适的训练角度,以达到理想的康复效果。
卧姿下空中踢球训练模式如图6 所示,主要针对髋关节的康复训练,训练开始时保持膝关节和踝关节角度不变,在可活动范围内逐渐加大髋关节的角度。 该模式有助于促进人体腿部血液循环,并训练人体髋关节的灵活度,一般训练角度为40°~85°之间。

图6 踢球训练模式Fig. 6 Kicking training mode
卧姿下踢腿训练模式如图7 所示,主要针对膝关节的康复训练,训练开始时首先将髋关节抬升至90°保持不变,并同时保持踝关节不动,然后增加膝关节的训练角度和力度来达到训练膝关节的目的。这种训练方法有助于提升患者大腿部位股四头肌的力量,并能够训练膝关节的灵活度,一般膝关节的训练角度在40°~110°。
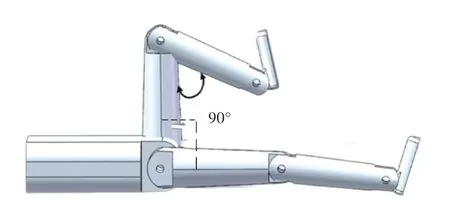
图7 踢腿训练模式Fig. 7 Kick training mode
脚踝摆动训练模式如图8 所示,主要针对踝关节的康复训练,是在髋关节和膝关节的训练角度保持不变的前提下,增加踝关节的训练角度,使其在矢状面内绕额状轴进行跖屈和背屈训练,在水平面上绕着小腿的轴线进行内收和外展训练。 这样的训练有助于促进患者踝关节处的血液循环,一般踝关节跖屈和背屈训练角度分别为0°~50°和0°~20°,内收和外展训练角度为0°~45°和0°~50°。 跖屈背屈和内收外展训练可同步进行,实现踝关节的立体式康复训练。

图8 脚踝摆动训练模式Fig. 8 Ankle swing training mode
空中蹬自行车训练模式如图9 所示,主要针对髋关节和膝关节的复合训练,训练开始时由于脚跟部设计安装有柔性末端保证被动柔顺,因此可不考虑踝关节训练角度,然后只增加膝关节和髋关节的训练角度和力度使踝关节中心绕空中某一圆心进行圆周运动,以此达到髋关节和膝关节同步训练的目的,有助于增加康复患者的髋膝配合协调能力。
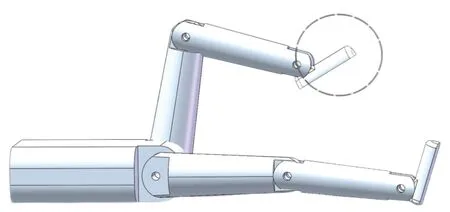
图9 空中蹬自行车训练模式Fig. 9 Training mode of cycling in the air
当然也可通过将上述各个模式相互结合实现多个模式的复合训练,提高康复训练效率,使患者的下肢得到全方位的康复治疗。
4 双关节与多关节的轨迹规划仿真
机器人的运动规划主要包括几何路径规划(Way)和轨迹规划(Time)两大部分,其中几何路径规划是指规划连接位置A和位置B间序列点或曲线的策略,在机器人中主要表现为关节点到点运动、直线点到点运动、圆弧点到点运动和样条点到点运动四种;而轨迹规划是规划机器人末端在空间中的路径以及在该路径上各个中间点的速度和加速度等。轨迹规划算法主要分为多项式规划、三角函数规划等,但由于上述轨迹规划算法存在没有最大速度和最大加速度限制的问题,会造成速度、加速度产生突变,从而产生冲击,因此本文将结合设计的康复治疗模式采用S 形轨迹规划(七段规划),以保证达到理想的康复效果[15]。
4.1 双关节轨迹规划及仿真分析
蹬自行车、抬腿等一系列人们下肢基础动作的实现都依赖于髋关节和膝关节的紧密参与,因此针对下肢功能障碍患者的髋膝关节康复所设计的康复训练动作(见图9),在下肢康复机器人的安全工作空间内,仿照蹬自行车的运动模式,规划平面画圆的末端运动轨迹。
把末端画圆轨迹代入到S 形轨迹规划算法(七段规划)中,并将算出的数据结果输入在Simscape Multibody 上搭建的机器人模型中进行仿真。 初步设置仿真时长为15 s,圆心坐标为(300,300),半径为180 mm,髋关节和膝关节的初末速度、初末加速度皆为0 rad/s、机器人运行的整个过程中最大速度为0.4 rad/s、最大加速度为0.3 rad/s2、最大加加速度为0.3 rad/s3,得到机器人髋膝关节的角位移、角速度和角加速度曲线如图10 所示。 从图10 可以看出,卧式下肢康复机器人在进行髋膝关节康复训练时角位移曲线转折处平滑、无突变现象。 角速度大致可分为7 段,转折处过渡平稳,无尖锐突起点,证明运动过程平稳,患者髋膝关节康复治疗体验效果较好。

图10 圆轨迹髋膝关节曲线图Fig. 10 Curve of hip and knee joint in circular track
4.2 多关节的轨迹规划及仿真分析
奔跑、跳跃等一系列人体下肢动作都不会仅仅只依靠2 个关节,而是由多个关节相互配合、相互协调组成的复合运动。 因此,只针对髋膝关节的康复训练并不能确保对下肢功能障碍患者的康复效果。现根据所设计的卧式下肢康复训练机器人的结构特点,结合所设计的人体下肢康复训练模式,在机器人的安全运动空间内,进行髋、膝、踝三关节相结合的康复轨迹规划。 规划髋膝关节平面画圆轨迹辅以踝关节内收外展训练,这样可以实现对髋膝踝关节的全方位一体化康复,进而提升康复治疗效果。
利用S 形轨迹规划对髋、膝、踝关节运动轨迹进行计算,同时在Simulink 中搭建的机器人模型上进行仿真。 初步设置仿真时间15 s,运动过程中髋、膝、踝关节的起始速度和终止速度皆为0 rad/s、最大速度分别为0.4 rad/s、0.4 rad/s 和0.2 rad/s、最大加速度分别为0.3 rad/s2、0.3 rad/s2和0.3 rad/s2、最大加加速度分别为0.4 rad/s3、0.3 rad/s3和0.4 rad/s3,得到机器人髋膝关节的角位移、速度和加速度曲线,如图11 所示;踝关节的角位移、速度和加速度曲线,如图12 所示。 从图11、图12 中可以看出,髋、膝、踝关节的角位移和角速度曲线转折处较为平滑,证明仿真过程中机器人运动平稳。

图11 髋膝关节曲线图Fig. 11 Curve of hip and knee joint
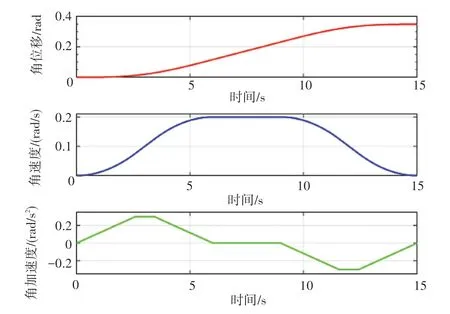
图12 踝关节曲线图Fig. 12 Curve of ankle joint
5 实验与分析
本文以卧式下肢康复机器人为研究对象,实验时对正常人的左侧腿部进行髋膝关节末端的平面画圆康复训练实验,如图13 所示。 实验对象为中国男性,身高170 cm,年龄25 岁,经实际测量,大腿长465 mm,小腿长369 mm。 实验过程中将测试者小腿固定在康复机器人的腿部支架上,脚固定在脚踏板中。 将S 形轨迹规划算法得到的数据作为期望的康复轨迹数据,2 个电机编码器采集到的数据作为实际康复轨迹数据,绘制康复机器人髋膝关节的期望位置与实际位置,如图14 所示。
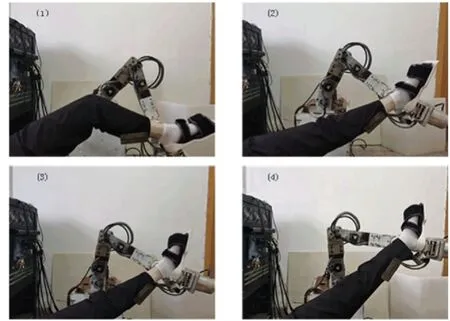
图13 髋膝踝关节康复实验Fig. 13 Hip,knee and ankle rehabilitation experiment
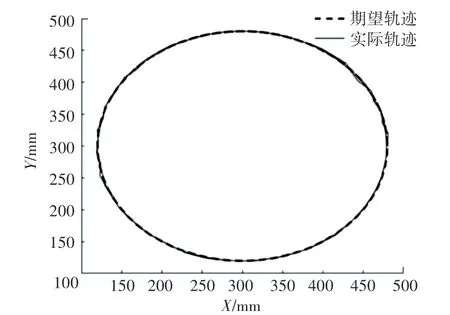
图14 末端画圆跟踪曲线Fig. 14 Tracking curve of drawing a circle at the end
从图14 可以看出,在末端画圆的康复实验中所得到的各个时刻的实际康复轨迹与利用S 形规划得到的期望轨迹基本吻合,康复训练过程机器人运动平稳,无明显扭拽现象,实验全程测试者感觉舒适,证明了卧式下肢康复机器人结构设计合理、利用S形轨迹规划切实可行。
6 结束语
将康复医学与现代机器人技术相结合所设计的卧式下肢康复训练机器人,解决了现有机器人缺乏柔顺性、结构繁杂等问题。 通过对该机器人的结构、运动学和髋膝踝关节运动范围的分析,并结合现代康复理论,设计了多种康复训练模式;将S 形轨迹规划原理与所设计的康复训练模式相结合,在Simulink 中进行双关节和多关节的仿真,并通过实验验证了康复机器人结构的合理性及康复模式的科学性,为下一步进行人机交互的主动康复策略研究奠定了基础。
