煤航隧宝在隧道点云数据处理中的应用分析
2023-02-27张健珲杨培义宋袁龙彭桂辉
张健珲,杨培义,宋袁龙,彭桂辉
(1.中煤(西安)航测遥感研究院有限公司,陕西西安710199;2.中煤航测遥感集团有限公司技术发展研究院,陕西西安710199)
隧道项目工程监测技术是隧道工程的一个重要构成部分,三维激光扫描技术以其可连续、自动、快速地收集大量且完整的目标物表面三维点云数据、以及可进行非接触式数据获取等优点,被隧道建设工程领域广泛使用[1-5]。张豪等利用获得的隧道点云数据分析隧道超欠挖信息,认为点云数据相对常规全站仪、断面仪所得到隧道超欠挖结果更为精确[6]。李勇兵等利用隧道全断面三维点云数据分析隧道变形状况,认为分析结果更加直观、相对传统方法,可以快速检测施工质量及偏差[7]。白彦波等将激光点云应用于隧道施工开挖优化,分析发现超欠挖现象有明显改善,有助于隧道开挖整体工程的空间精确优化[8]。葛超等提出一种基于三维扫描和图像处理技术的检测方法,通过规则格网内插将展平后的点云数据转换为图像,后用连通域分析的方法标记不同的超欠挖区域,应用于施工过程中的隧道超欠挖检测,效率高且精度满足要求[9]。李瑶等研究一种基于三维激光扫描技术的隧道超欠挖算法,将此算法应用于某矿山法铁路隧道施工中,能够方便快捷的计算断面超欠挖情况,便于施工单位调整爆破方案,具有一定实用价值[10]。
中煤(西安)航测遥感研究院有限公司在前人研究的基础上,针对隧道点云数据设计研发了一款全自动化点云数据处理软件——煤航隧宝三维激光点云数据处理软件(Tunnel-DP,以下简称煤航隧宝)。该软件兼容多种格式的三维激光点云数据,通过对隧道点云数据的自动化、智能化处理,能够完成隧道检测需要的数据准备,支持进行隧道施工过程的数据管理和竣工验收的质量检测,进而指导现场施工。
1 点坐标计算原理(定位原理)
通过三维激光扫描可以获取大量点的坐标(点云),它采用相位式激光测距仪,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离[11-12]。
若调制光的角频率为ω在待测量距离D上往返一次产生的相位延迟为φ,则对应的时间t可表示为t=φ/ω。激光发射速度可以保持一定可视作常量,所以发射点和目标的距离可以利用时间来计算,与此同时,三维激光扫描仪能够记录反射信号强弱,故不同的反射信号可以表征不同物体的部分物理性质[13-14]。
在空间坐标系中,三维坐标X、Y、Z,仪器默认出发位置O,物体的高度h即坐标系中的Z,从激光发射初始点仪器会设置Y为面对物体的方向,X为相对Y的垂向。由记录的距离S、水平方向角α和垂直方向角θ,通过公式(1)即可计算出目标点的相对坐标x、y、z,坐标系如图1所示[15]。
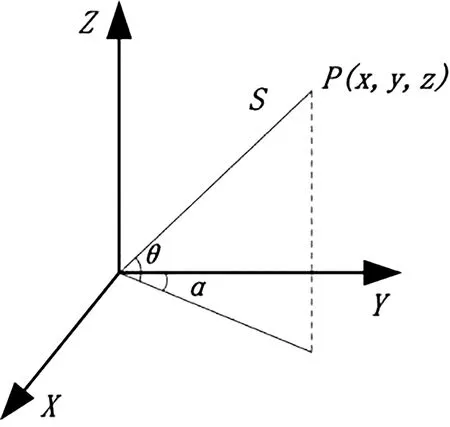
图1 坐标系Figure 1 Coordinate system
(1)
2 工程应用分析
2.1 数据处理流程
煤航隧宝功能全面,除点云基本处理功能如多模式渲染、分类、裁剪、合并、点法向量计算、平面曲面拟合等等外,针对隧道工程施工方面的特色功能有超欠挖计算和方量计算两个。本文从超欠挖计算和方量计算两个功能模块展开,结合中铁一局承建的某段隧道,详细说明由原始点云数据经过添加设计断面和线路、坐标转换、点云滤波、隧道超欠挖计算、方量计算等步骤得出最终成果的过程,数据处理流程如图2所示。

图2 数据处理流程Figure 2 Data processing flow
2.2 坐标转换
一般来说,通过三维激光扫描仪所获取的初始点云数据都处于扫描坐标系下,在这种扫描坐标系下,原点O为激光发射点,Z轴向上为正,位于仪器的竖向扫描面内;X与Z轴垂直,位于仪器的横向扫描面内;Y与X轴垂直,位于仪器的横向扫描面内,同时Y轴正方向指向物体且与X轴、Z轴一起构成右手坐标系。而设计线路坐标系与扫描坐标系非同一空间直角坐标系,这时就需要将点云通过七参数方法进行坐标转换,将点云坐标统一到设计线路坐标系下[16]。
两个坐标系之间的x2平移值x0、y2平移值y0、z2平移值z0、x旋转角度ωx、y旋转角度ωy、z旋转角度ωz,尺度比m,其数学模型为式(2)所示:
(2)
在不同空间直角坐标系的转换中式(2)原理应用非常广泛[17],七个参数的解至少需要3个公共点才可以求取,即要分别知道3个点在扫描坐标系中的坐标和在线路坐标系中的坐标,也可以使用4个及以上公共点,这种情况下能够得到多余观测值用来计算残差,使用残差对解进行改正,获取更高精度的解算参数。当公共点数多于6个时,使用曲面拟合高程模型,当公共点数少于6个时,使用平面拟合高程模型,使用曲面拟合高程模型可以获得更高的高程测量精度。使用七参数对点云数据进行坐标转换后点云与线路在同一坐标系下,此时,线路模型与点云数据能够完整套合,为接下来的计算做好了准备。
2.3 点云滤波
由于隧道施工现场较复杂、被测物体表面性质变化、操作者经验因素、数据拼接配准过程、采样分辨率不同和电磁波的衍射性等的影响,采集的点云数据都会存在离群点、噪声点等干扰计算精度的因素,滤波是比较常见的点云处理方法,有去除离群点、去除噪声点、去除空洞、点云平滑、数据压缩等多种功能,我们可以通过点云滤波尽可能除去这些干扰因素的影响,煤航隧宝除采用通用的点云滤波算法外,也结合工程实际,设计了一套更加适合隧道点云滤波的算法,主要分为以下步骤:
1)整体使用离群点检测滤波算法进行离群点剔除。
2)对某一里程段的点云数据建立mesh模型。
3)以隧道设计断面作为参考,沿着mesh模型法线方向剔除噪声点。

图3 点云滤波结果对比Figure 3 Point cloud filtering results comparison
进行点云滤波前后的结果对比如图3所示,滤波后的点云数据只保留了隧道壁上的点云,去除了隧道内部的干扰因素,滤波效果较好,满足进一步处理的要求。
2.4 隧道超欠挖计算
隧道超欠挖分析的主要算法思想:将隧道点云按里程进行切片,切片后的隧道点云(默认20cm厚度)可以看成前后一致没有弯曲的一段直线隧道。将该段隧道点云进行平移和旋转,与设计断面(平面曲线)进行套合,再通过垂距趋近法计算隧道点云到设计线元的偏距,该偏距即为隧道点云超欠挖值。
基于垂距趋近法计算当前里程隧道点云超欠挖值的主要步骤如下:
1)按照线路参数和隧中偏移量计算当前里程的隧中坐标和切线方位角,再根据切线方位角计算旋转矩阵。
2)根据隧中坐标和旋转矩阵对当前段隧道点云进行平移和旋转,使其与XOZ平面平行,且隧道中点位于原点处。
3)在XOZ平面上,将隧道点云分为左右两部分,分别计算到左右设计线元的偏距即超欠挖值。
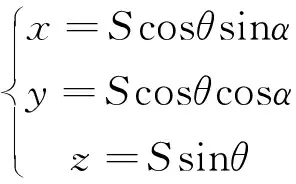
计算结果如图4所示,冷色区域代表超挖,暖色区域代表欠挖。同时可一键输出pdf或者doc格式的报告,报告示例如图5所示。

图4 隧道超欠挖结果Figure 4 Tunnel over-under-excavation results
图5 隧道超欠挖报告Figure 5 Tunnel over-under-excavation report
2.5 方量计算
对初支施工前后两次断面扫描数据进行方量计算,可得出初支混凝土灌注量以及每个里程段所对应的初支厚度。通过计算初支扫描断面数据与二衬设计断面的方量可以得到二衬每板所需的混凝土灌注量,并通过对比所需混凝土灌注量与实际混凝土灌注量来检查该板的衬砌是否密实,减少脱空率,对施工具有一定参考价值。
针对方量计算,本软件采用的断面法计算可分为如下步骤:
1)采用向量叉乘的方法计算断面面积(实测断面或设计断面)。
2)根据积分思想,求得任意里程段的隧道体积。
3)将二衬与初支隧道设计体积做减法,得到混凝土方量(实测方量或设计方量)。
图6展现的是软件界面上该隧道K34+945-K34+955里程段内的方量计算结果,包含设计方量与实测方量(超限方量),图7为方量模型示意图。

图6 方量计算结果Figure 6 Volume calculation results

图7 方量模型示意图Figure 7 Volume model diagram
3 结论
本文以中铁一局承建的某段隧道的点云数据为例,采用煤航隧宝软件对数据进行了全流程化处理,得到以下结论:
1)相对传统的全站仪法、断面仪法,三维扫描系统从数据获取到结果展示,效率更高。
2)隧道点云数据可以极其精细地表征隧道表面特征,完全满足隧道施工测量要求,具有很高的使用价值。
3)软件能够快速检测隧道施工质量,及时提供隧道施工过程中的超欠挖、平整度、混凝土方量等检测报告,辅助隧道施工过程的精细化管理,为保证隧道施工质量和控制施工成本提供了一套完整的解决方案。