串联式混合动力搅拌车控制策略仿真研究
2023-02-27王鲁闽武涛缪雪龙
王鲁闽,武涛,缪雪龙
(201620 上海市 松江区 上海工程技术大学)
0 引言
串联式混合动力汽车是一种结构相对简单的混合动力汽车,其发动机动力输出给发电机,而不是用以驱动车辆行驶,同时车辆的动力电池可以外接充电设备,通过电网获取电能,可以拥有一定距离的纯电行驶能力。
串联式混合动力汽车既能保持传统燃油车续航久的特点,又能降低油耗和排放[1-2];相较于燃油车,其发动机工作平稳,能有效避免低效区域[3-5]。对于串联式混合动力汽车而言,选择合适的控制策略尤为重要[6-8]。牛继高等[9]经仿真研究发现最优曲线能量控制策略有助于发动机的最小化。
现有搅拌车多采用传统的柴油动力,而搅拌车工作时车辆的运行速度不高,有较多停车及怠速情况,发动机多处于低速低负荷区域,效率较低。在节能减排的大背景下,动力系统出现了多元化和电动化的趋势[10],为提高车辆的燃油利用效率和降低排放,对搅拌车进行新能源开发和控制策略的合理设计尤为重要。
本文对一型串联式混合动力搅拌车发电机组的发动机定点控制策略和基于最优工作曲线的功率跟随控制策略进行了研究并建立了控制模型,与仿真软件中建立的整车模型进行联合仿真验证与比较分析。
1 串联式混合动力搅拌车结构与基本参数
1.1 车辆动力系统结构
串联式混合动力搅拌车基本结构如图1 所示。在本车中发动机不与传动系统相连,而是通过发电机将燃料燃烧产生的能量转化为电能。驱动车辆行驶的动力不再由发动机提供,而是由一台驱动电机提供。与传统柴油搅拌车相比,从发动机驱动到液压马达来带动搅拌筒转动的动力,改变为单独的搅拌电机来提供。发电机产生的电能通过动力电池传递给驱动电机与搅拌电机。
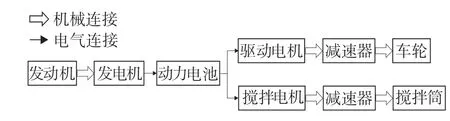
图1 串联式混合动力搅拌车动力系统结构Fig.1 Power system structure of series hybrid mixer
串联式混合动力汽车相较于其他混合动力车辆,发动机与传动系统完全解耦,行驶状况的变化并不直接作用于发动机的工况,故在动力性上与纯电动汽车更为相似,整车结构与动力传递路径也相对简单。相比传统柴油动力搅拌车,由于车辆工作时有较多对于传统发动机工作不利的低车速、低负荷状态,串联混动搅拌车可以使发动机不受影响地工作于更为高效的区域,以降低油耗。
1.2 车辆基本参数
本文研究的串联式混合动力搅拌车是由一型柴油动力搅拌车基础上开发而来,该车满载质量25 t,搅拌筒工作容量4.5 m3,其车辆的动力系统主要参数如表1 所示。本文在此车基础上针对发动机的能量控制策略对串联式混合动力搅拌车经济性的影响进行仿真研究。
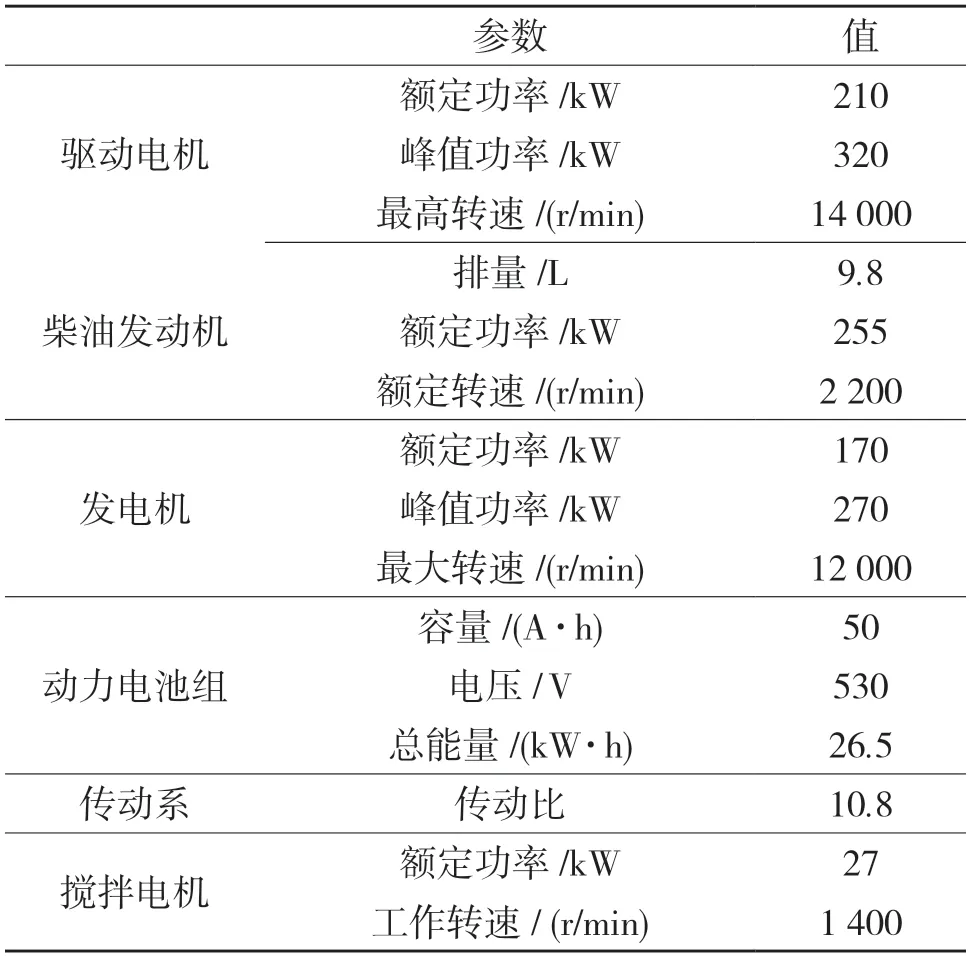
表1 动力系统参数Tab.1 Power system parameters
2 发动机控制策略的建立
2.1 定点控制策略
发动机的定点控制策略是基于串联式混动中发动机与传动系解耦这一特性,使发动机始终工作在指定工作点上,是最为简单高效的控制策略[11]。定点控制策略工作点的选择通常包括2 种:一种为选择发动机最高效的工作点,以使发动机尽可能降低油耗;另一种为选择发动机较大功率点,以减小发动机的排量,可控制发动机的体积与质量,但这种工作点效率较低,难以取得较好的节油效果。
本文中搅拌车使用的发动机功率较大,选择发动机工作于效率较高的1 300 r/min、转矩1 200 N·m处,如图2 所示。此时发动机输出功率为163 kW,对应永磁同步发电机也处于效率95%以上的高效工作区间。
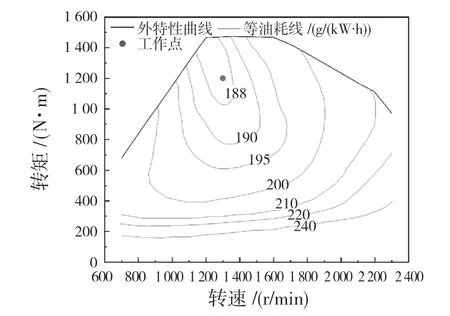
图2 定点控制策略工作点Fig.2 Working point of fixed-point control strategy
设定定点控制策略下发动机开启的逻辑为SOC值变化触发启停。车辆首先以纯电动状态行驶,当SOC 下降到 30%时,发动机启动,带动发电机发电以为车辆提供电能,当SOC 上升至60%后,发动机与发电机关闭。将SOC 控制在30%~60%之间,以避免过度充放电,减少对电池寿命的损耗。使用MATLAB/Simulink 软件建立了该定点控制策略的控制模型,如图3 所示。
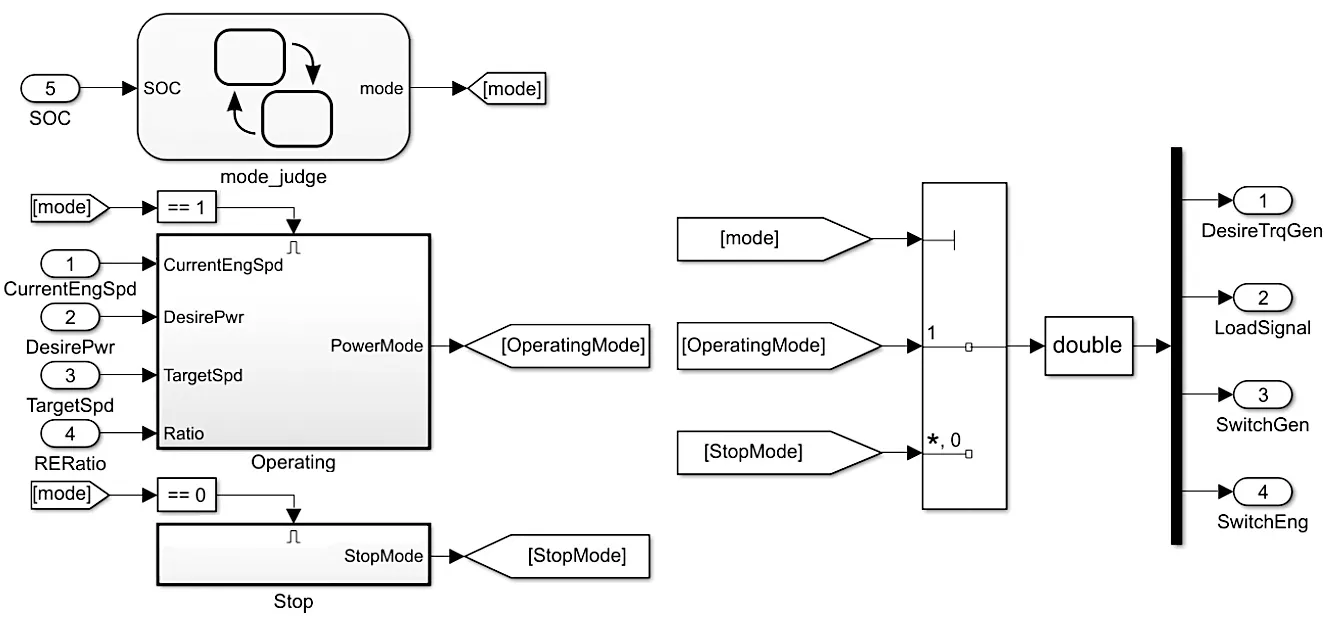
图3 定点控制策略模型Fig.3 Model of fixed-point control strategy
模型中,电池当前SOC 信号输入进Stateflow 判断模块。判定若SOC 低于SOC_min,则令mode=1;若SOC 高于SOC_max,则令mode=0。mode=0 状态下,发动机进入停止状态;mode=1 状态下,发动机和发电机启动。定点控制策略工作模块如图4 所示。通过转速的PID 控制输出发动机负荷信号使发动机工作在需求转速,并向发电机输出负的发电转矩。当发动机进入工作状态而转速过低时,先给予发电机正的转矩以带动发动机快速达到工作转速。
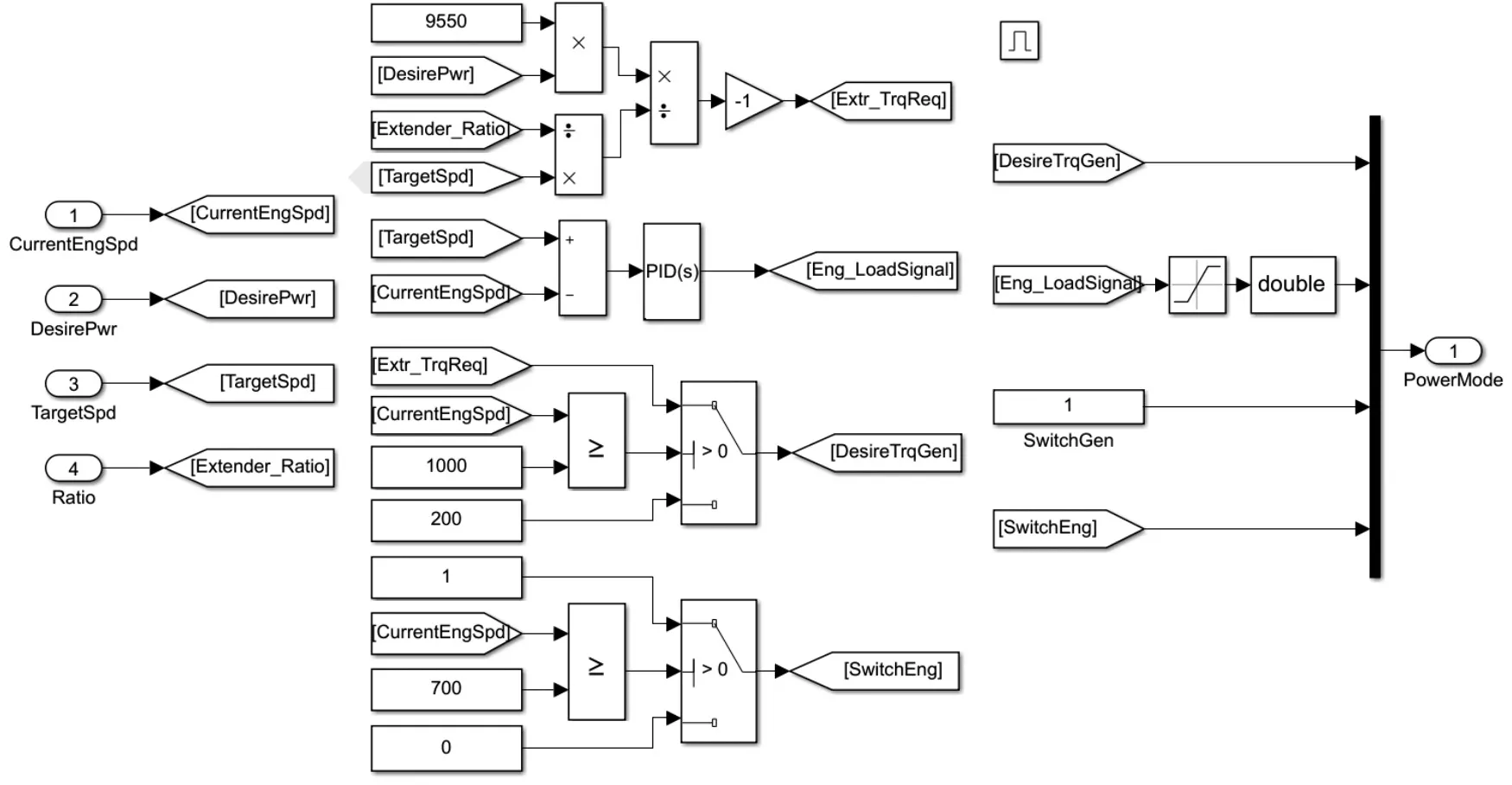
图4 定点控制策略工作模块Fig.4 Working Module of fixed-point control strategy
2.2 基于最优曲线的功率跟随控制策略
在最优曲线功率跟随控制策略中,发动机的工作状态沿万有特性图上的固定曲线变化,选取的曲线通常为多个功率下的最佳油耗点构成的曲线。随车辆行驶状态的变化,发动机不断改变工作点以跟随车辆需求功率的变化。在该模式下,发动机产生的功率几乎全部用于车辆行驶的功率需求和车载耗电器件的功率,有利于改善电池寿命。
在本策略下,以驱动电机、搅拌电机和车载用电器的总功率为需求功率,发电功率跟随需求功率而变化。发动机启动同样以SOC 值变化为基准,在30%~60%之间波动。
策略中采用的发动机工作曲线如图5 所示。在尽可能使工作点位于同功率下较低油耗的位置的前提下进行工作点的选择。较低功率下,使相近的工作点工作于同一转速下,使工作点尽可能位于高效区域且使发动机工作转速稳定;高功率下,维持恒转矩以尽量降低转速、高效工作。为使发动机不至于工作于效率较低的区域,设定了工作功率的范围,上限Pemax取240 kW,下 限Pemin取75 kW。
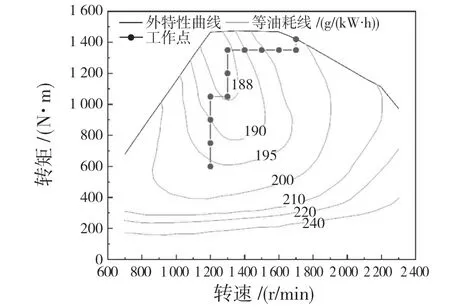
图5 发动机最优工作曲线Fig.5 Optimal operating curve of the engine
根据上述逻辑,使用MATLAB/Simulink 软件对基于最优曲线的功率跟随策略建立控制模型,模型形式与图3 所示的定点控制策略相近。但在工作模块中(如图6 所示),以车辆实时总需求功率为输入,由查询表模块得到当前需求功率对应工作曲线下的转速,并通过PID控制发动机工作。
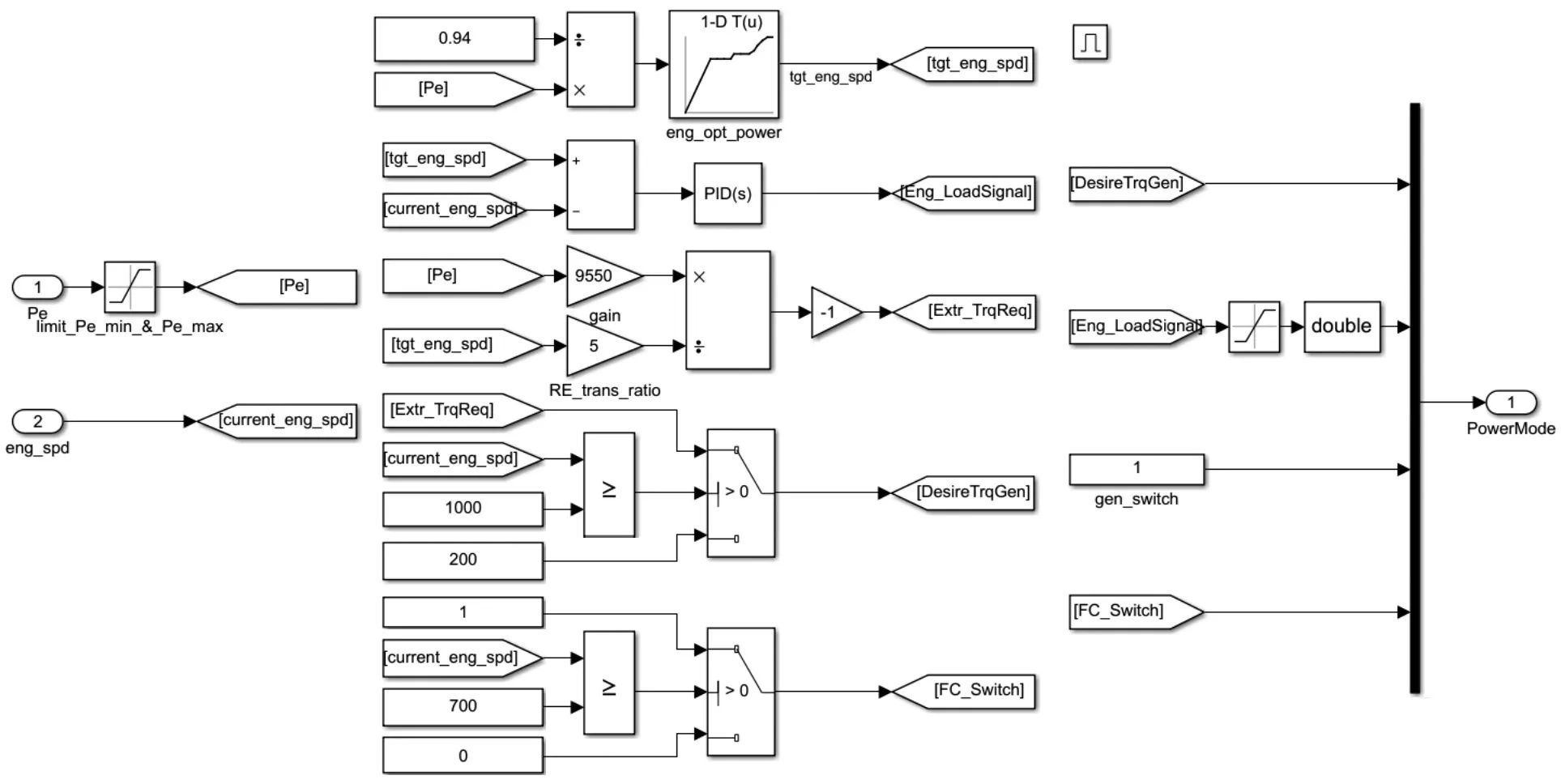
图6 功率跟随策略工作模块Fig.6 Working module of power following strategy
3 基于Cruise 软件的经济性仿真与分析
3.1 循环工况与初始设置
本文用于经济性仿真的工况为C-WTVC 循环工况,如图7 所示。C-WTVC 工况是中国检验重型商用车燃油经济性的循环工况,包括900 s的市区循环、468 s的公路循环和432 s的高速循环[12]。

图7 C-WTVC 循环工况Fig.7 C-WTVC drive cycle
使用Cruise 软件建立车辆动力学仿真模型。在经济性仿真过程中,为使负荷更接近工作负荷,设定搅拌车一直处于工作状态,即搅拌车装载工作容积的混凝土,质量为满载质量,且搅拌电机始终开启以使搅拌筒保持旋转。本仿真主要为检验发动机控制策略的影响,将SOC 初始值设定为30%,以使发动机从循环开始便进入工作状态。
3.2 仿真结果
图8 为5 个C-WTVC 工况下基于发动机定点控制策略的串联式混合动力搅拌车的电池参数与发动机工作变化。图中可以看到,在工作循环中出现了多次充放电的情况,电池SOC 值有10 次明显的波动,而发动机工作时始终工作于设定的工作点。
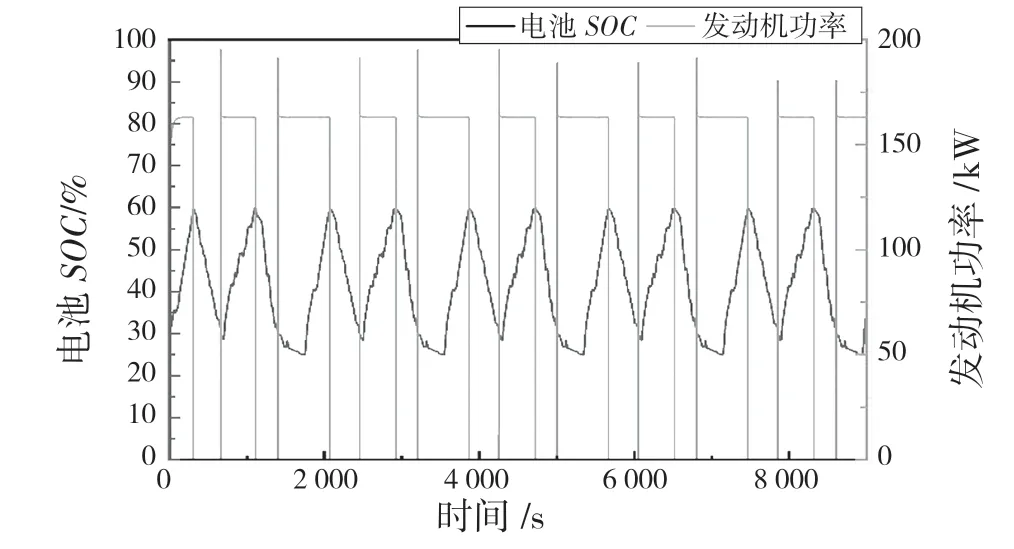
图8 定点控制策略仿真情况Fig.8 Simulation of fixed-point control strategy
图9为5个C-WTVC工况下基于发动机最优曲线功率跟随控制策略的串联式混合动力搅拌车的电池参数与发动机工作变化。工作过程出现了5 次充放电,但波动幅度和波动次数明显少于定点控制策略,反映了制定的功率跟随策略的发电功率更接近车辆行驶需求的真实功率,且能够降低电池充放电带来的损失。
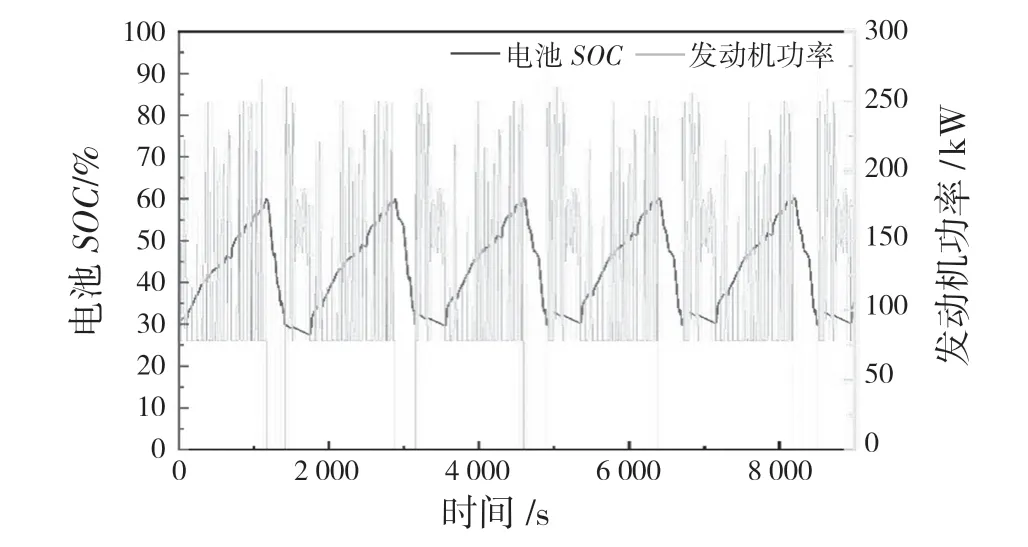
图9 功率跟随控制策略仿真情况Fig.9 Simulation of power following control strategy
功率跟随策略下,电池SOC 仍然有较大波动的原因如图10 所示。一个循环周期内发动机功率与电池电功率变化情况显示,在发动机工作的大部分时间,电池电功率均大于0,即发电机提供的功率大于车辆需求功率,这是由于发动机工作曲线下限为提高工作效率而选取了较大的75 kW 导致的。
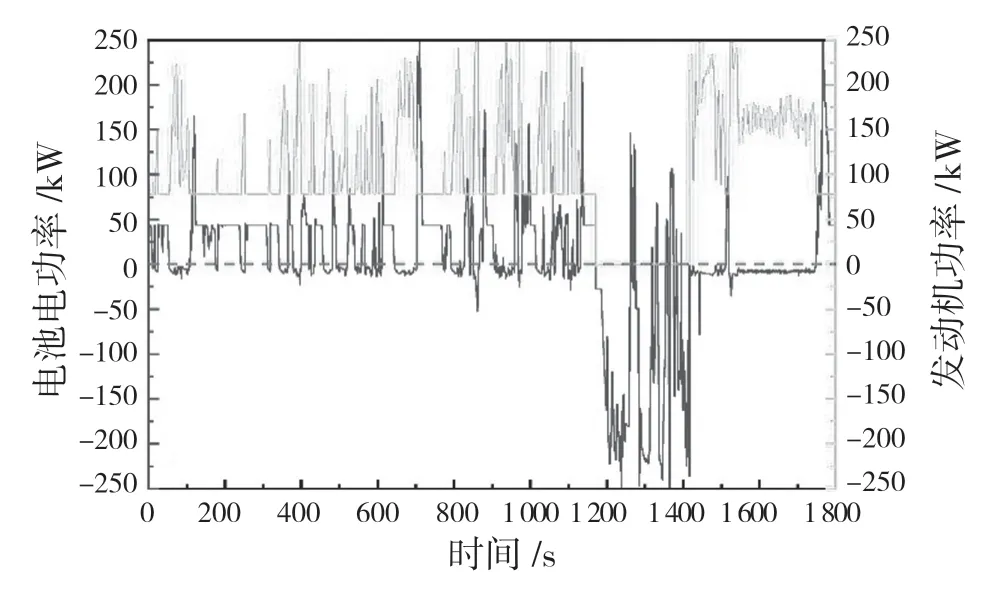
图10 发动机功率与电池电功率Fig.10 Engine power and battery electrical power
在5 个C-WTVC 循环工况下,发动机定点控制策略的燃油消耗情况为57.31 L/100km,而功率跟随策略则为58.40 L/100km,该车采用功率跟随策略的油耗情况与定点控制策略油耗基本相当。
4 结论
本文根据某串联式混合动力搅拌车的工作特点,分析了发动机控制策略,建立了MATLAB/Simulink 控制策略模型,进行了整车动力学仿真,分析结果显示:(1)该搅拌车采用功率跟随策略的燃油经济性与定点控制策略相当;(2)功率跟随策略相比定点控制策略能明显降低电池充放电次数,对电池寿命更友好;(3)该功率跟随策略为追求高效率而选取了较高的最低功率点,这将发电功率长期高于需求功率,从而导致电池SOC 值的波动。
