车路协同环境下公交车队车速优化调控方法
2023-02-27徐辉吴建平
徐辉, 吴建平
(1. 清华大学土木水利学院, 北京 100084; 2. 悉地(苏州)勘察设计顾问有限公司, 苏州 215123)
优先发展公共交通是当今世界解决城市交通堵塞、节约能源、发展环保的有效措施之一,自公共交通优先发展战略确立以来,即关于优先发展公共交通意见的通知(国办发〔2005〕46号)发布以来,城市公共汽电车交通系统(以下简称“公交”)运输服务能力得到极大提升,运输服务网络逐渐成熟完善。公交系统的主要矛盾由早期的“运能不足”转变为当前的“质量不高”[1]。公交系统具有服务频率高、客流需求大等特征,中国诸多大、中型城市公交客运走廊车辆串行问题突出,站点位置车辆排队进站现象普遍,对车辆行驶过程造成大量运行延误,还增加了站点上车乘客的步行距离;同时,公交客运走廊往往也是社会交通需求较高的城市干线道路,信号控制交叉口位置公交车辆通行延误也极为显著,严重限制了公交线路乘客输送速度。因此,如何有效改善公交运行效率与服务可靠性,提升公交服务质量,是相关政府、营运企业亟待解决的关键问题。
公交运行控制是信息化条件下提升运行效率的重要手段,是基于车辆自动定位技术的计算机辅助调度管理(computer-aided dispatch/automatic vehicle location,CAD/AVL)系统的核心功能;美国交通运输研究委员会(Transportation Research Board,TRB)一直将其列为智能公交系统(advanced public transportation system,APTS)领域的热点研究方向,并且设置AP010研究组负责推进该方面的科学研究工作。当前公交运行控制的研究分为两大领域,一方面是面向公交服务可靠性提升的运行控制,采取以站点位置公交车辆驻站控制为主要手段的调度管理措施[2-4];另一方面是面向运行效率提升的运行控制措施[2]。其中,前者以驻站控制为主要手段,其对公交运行效率存在一定负面影响[3-4]。后者主导思想是在尽可能降低对社会车辆通行效率影响基础上降低公交车辆在信号控制交叉口的延误,主要措施可分为3类:①信号控制方案响应公交车辆优先通行需求,通过公交优先信号控制方式实现,控制策略包括被动优先[5-6]、主动优先[7-9]与实时优先[10-12],其原理是以一定程度社会车辆延误增加代价来实现人均延误的最小化[12];②公交车辆主动适应信号控制方案,通过优化调控公交车辆的行驶速度方式减小车辆在信号控制交叉口的延误[13-15];③交叉口信号控制与公交车速协同优化,即基于车路协同环境下,保证公交行驶情况最优的情况下,设计交叉口信号控制方法和最佳车速调整的规则来减小车辆在信号控制交叉口的延误[16-18]。
然而,现有研究鲜有考虑控制策略诱发形成的车队对下游站点停靠过程的影响。例如,调控公交车辆的行驶速度可能导致优先通行的车队在下游站点形成排队进站的现象,进而造成新的延误。由此出发,现设计一种兼顾效率与可靠性多重目标优化的运行控制策略,通过优化调控公交车辆行驶车速,降低公交车辆在信号控制交叉口的停车延误,同时满足公交车辆的串车预防与下游站点泊位能力的需求,实现对当前车路协同环境下公交车速调控方法的优化改善。研究成果弥补当前车路协同环境下车速调控方法在车辆串车预防与下游站点泊位约束方面的不足之处,对于改善提升城市公交客运走廊乘客出行效率、提升线路服务可靠性与降低站点停靠延误具有重要的理论意义与实践价值。
1 基于车路协同的公交车队速度控制方法
1.1 问题描述
基于的车路协同系统由两部分组成:一是车载单元(onboard unit,OBU),实现车辆位置、速度的实时检测以及车辆运行速度控制;二是路侧单元(roadside unit,RSU),根据其布设位置分为交叉口RSU与站点RSU,为公交车辆提供优化决策的最佳行驶速度[4]。OBU与RSU之间可以实时数据通信,其信息交互的内容如图1所示。
为了实现公交车辆交叉口通行延误降低、站点通行延误降低以及串车预防的多重目标,交叉口RSU单元在接收上游区域公交车辆的位置信息后进行车辆最佳行驶速度优化决策时,要考虑3个方面的需求:①各个绿灯相位能够通过速度调控方式通过的协同车队规模;②协同车队中是否存在属于同一线路的车辆造成串车效应;③协同车队的规模是否超出下游站点停靠能力(泊位数)的约束。
定义Gj、Rj分别为信号控制交叉口公交车辆通行方向的第j个信号控制周期的绿灯相位启动时刻与结束时刻;以交叉口进口道停车线作为参考断面,第j个信号控制周期可供公交车辆通行的时间窗为[G1,R1]。定义tk,n为车辆k(隶属线路n)从当前位置运动至停车线的行驶时间,车辆抵达停车线的时刻为:Tk,n=T0+tk,n。定义min(Tk,n)为车辆抵达停车线的最快时刻,对应的行驶速度为Vmax;max(Tk,n)车辆为抵达停车线的最慢时刻,对应的行驶速度为Vmin,则车辆到达停车断面线的时间窗为[min(Tk,n),max(Tk,n)],如图2所示。
如果车辆到达时间窗与任意一个信号控制周期的绿灯相位时间窗之间存在交集,即
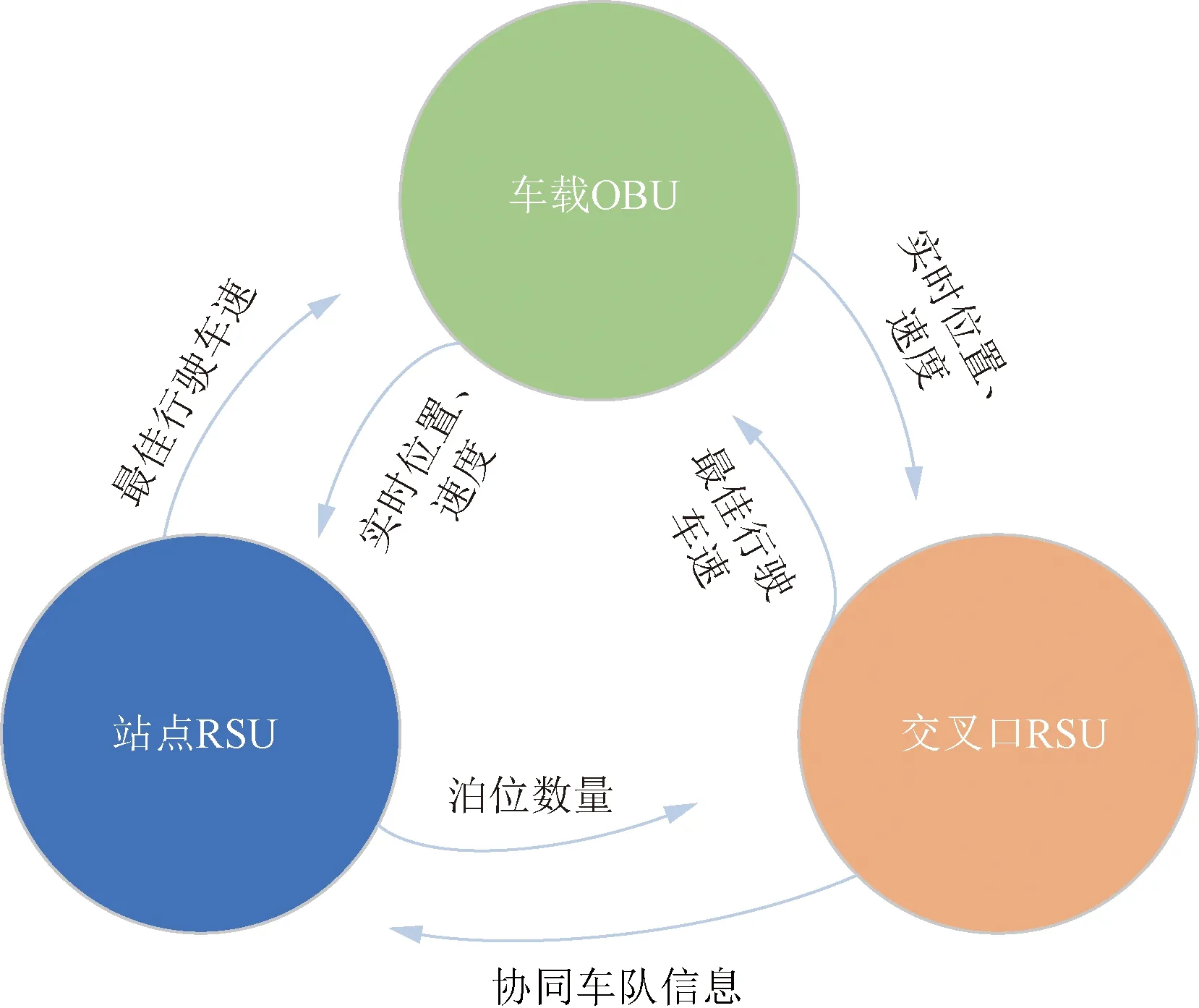
图1 公交车路协同系统信息交互内容Fig.1 Information interaction in CVIS
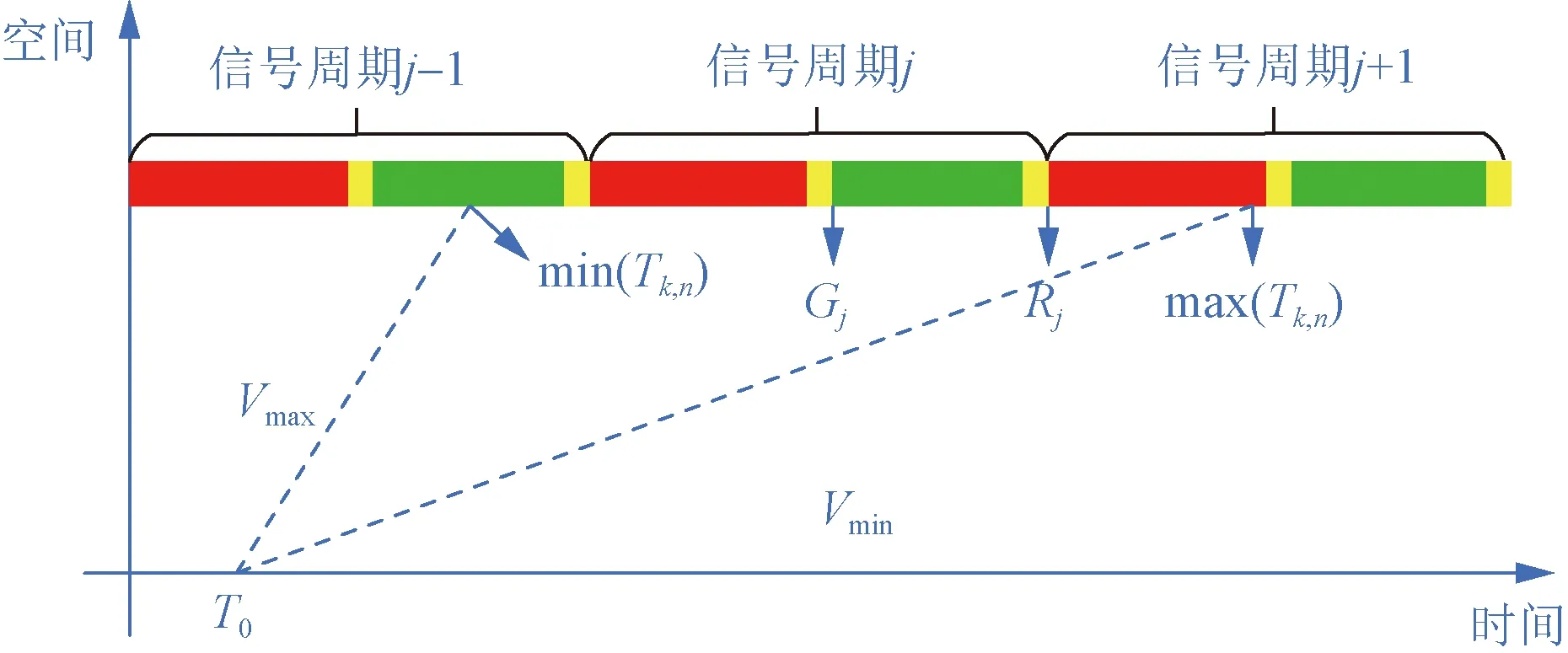
图2 信号控制方案与车辆运行轨迹示意图Fig.2 Illustration of traffic signal and bus trajectory
[min(Tk,n),max(Tk,n)]∩
{[G1,R1]∪…∪[Gj,Rj]∪…}≠φ
(1)
式(1)中:j为周期编号;k为车辆编号;n为线路编号;φ为空集。式(1)表示可以通过速度调控实现该车辆不停车通过交叉口;反之,如果交集为空集,即
[min(Tk,n),max(Tk,n)]∩
{[G1,R1]∪…∪[Gj,Rj]∪…}=φ
(2)
式(2)表示车辆无法通过速度调控模式实现不停车通过交叉口。
当存在若干车辆满足与同一绿灯相位的交集不为空集时,那么这一组车辆就会形成一个协同车队(经过速度调控后公交车辆会在交叉口区域集聚为车队)通过交叉口。
定义θj,k,n为能否通过速度调控方式实现车辆k(隶属线路n)在第j个周期的绿灯相位不停车通过交叉口,其中θj,k,n=1为可以通过,θj,k,n=0为不可以通过。
(3)
因此,可在第j个信号周期的绿灯相位不停车通过交叉口的车辆数为
(4)
式(4)中:n为途径该交叉口的公交线路编号,取值为1,2,…;k为途径该交叉口线路n的公交车辆编号,取值为1,2,…;Nj为能够在第j个相位通过交叉口的总车辆数,即能够协同的最大车队规模。
然而,初始协同车队存在两个重要缺陷,首先,协同车队当中可能存在属于同一线路的公交车辆,导致串车现象发生,对服务可靠性造成严重破坏;第二,协同车队的规模可能会超出下游站点泊位能力约束,导致车辆排队进站,进而带来大量的站点排队时间延误。因此,需要对协同车队的引入准入机制,满足串车预防与泊位能力约束的要求。
1.2 协同车队编组与速度优化
1.2.1 准入机制一:串车预防约束
1.2.2 准入机制二:下游站点泊位能力约束
如果信号控制交叉口下游区域紧邻有公交站点,协同车队的规模应该满足下游站点泊位能力约束。假定站点泊位数为C,C≥1,每次允许的停靠车辆数为C;如果车队在离开交叉口后,协同车队的规模小于等于C,所有车辆均满足停靠泊入需求;如果车队在离开交叉口后,协同车队的规模大于C,车队在离开交叉口后面临一个重新分离重组的过程来降低进站延误;即以C为基本单元,分离成若干个车队,记为重组车队1,2,…,λ,重组车队的运行规则为:协同车队队首的C辆车继续以当前速度行驶直到泊入站点,后续车队车辆逐渐减速实现分离后依次泊入站点,各重组车队泊入站点轨迹如图3所示。
协同车队队首前C辆车(即重组车队1)从交叉口出口道断面线行驶到站点过程包括两个阶段:匀速行驶阶段(DE);减速行驶阶段(EF)。重组车队1从交叉口抵达站点的时间可以表述为两阶段行驶时间之和,即
t1=t1,u+t1,d
(5)
式(5)中:t1为重组车队1从交叉口抵达站点的时间;t1,u为重组车队1匀速行驶阶段的行驶时间;t1,d为重组车队1减速行驶阶段的行驶时间。假定协同车队队首车辆离开交叉口的速度为V1,根据牛顿运动定律,重组车队1所需减速时间t1,d为
(6)
式(6)中:a为车辆的减速度。
根据牛顿运动定律,重组车队1离开交叉口后匀速行驶的路段长度l1,u为
(7)
式(7)中:S为交叉口出口道断面线到站点的距离。因此,重组车队1的匀速行驶时间t1,u为
(8)
结合式(5)、式(6)和式(8),重组车队1从交叉口抵达站点的时间t1可表示为
(9)
为使协同车队实现陆续泊入站点,进而减小进站延误的目的,当重组车队1离开交叉口之后,其余车队需进行减速,以实现逐渐分离;即除重组车队1之外的各车队从交叉口行驶到站点过程包括先减速与前面车队分离,然后匀速行驶,最后减速泊入站点3个阶段,如图3所示。
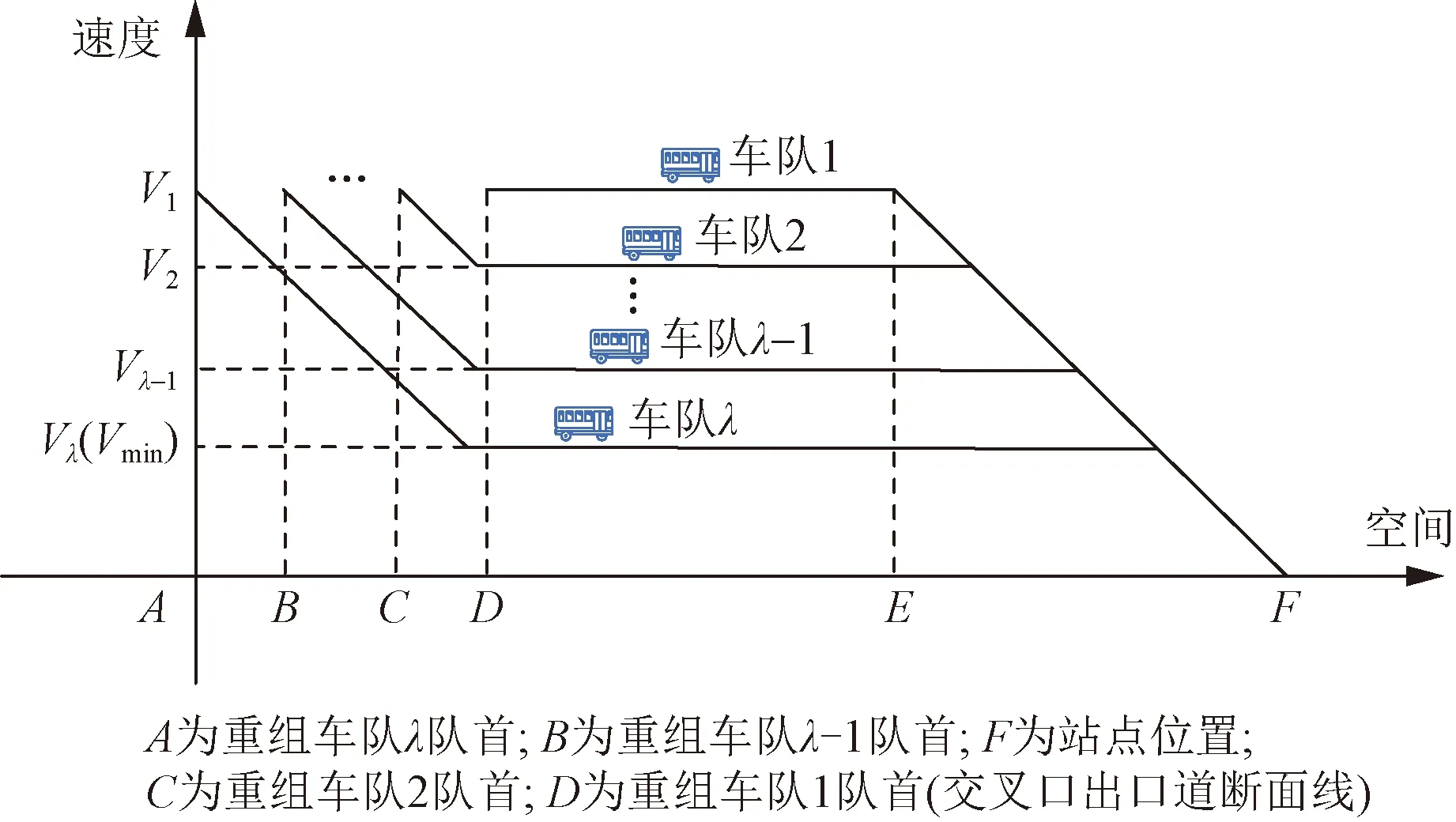
图3 重组车队泊入站点轨迹示意图Fig.3 Illustration of reorganized fleet trajectory approaching to the station
为寻找满足泊位能力要求的最大协同车队规模,假定重组车队λ为满足泊位能力要求的最大协同车队分解后的最后一个车队,其抵达站点的时间tλ同样为减速和匀速两阶段行驶时间之和,即
tλ=tλ,u+tλ,d
(10)
式(10)中:tλ,u为重组车队λ的匀速行驶时间;tλ,d为重组车队λ的减速行驶时间。假定公交车辆的减速度a为定值,各车队车辆减速时间相同,即
(11)
车队λ匀速行驶的路段长度lλ,u为
lλ,u=S+(λ-1)CL-lλ,d
(12)
式(12)中:L为单位车辆的长度,假设协同车队中所有公交车长度相同。
由于λ为满足泊位能力要求的最大协同车队分解后的最后一个车队,其匀减速后的匀速运动速度是允许的运行速度下限Vmin。因此,重组车队λ的匀速行驶时间tλ,u为
(13)
结合式(10)、式(11)和式(13),重组车队λ从交叉口抵达站点的时间tλ可表示为
(14)
假定Δt为每一个车队在站点的平均服务时间,最后一个分离车队λ与第一个分离车队抵达站点的时间差tλ-t1应该大于等于前面λ-1个车队的总服务时长,即
tλ-t1≥(λ-1)Δt
(15)
将式(9)与式(14)代入式(15)中,λ应该满足以下约束:
(16)
满足式(16)约束的λ的最大正整数[λ]决定了下游站点能够服务的通过交叉口的协同车队最大长度。因此,当交叉口下游存在站点时,通过交叉口的协同车队规模应该小于等于[λ]C;如果超过这一规模约束,需要对车队进行重新编组,即前[λ]C辆车构成绿灯相位的协同车队,后续的车辆编入下一绿灯相位的协同车队。
对于离开交叉口的协同车队,如果下游紧邻有公交站点,以站点泊位数量C为编组基数对协同车队进行分解,满足依次进站的需求,降低车辆在站点的排队进站延误。重新编组完成之后,如果车队数为1,不需要对协同车队发布速度指令;如果车队数大于1,需要满足两个车队抵达站点的时间间隔大于等于公交车辆站点平均服务时间Δt。以第2个车队为例,其抵达站点的时间t2为
(17)
令t2-t1=Δt,求得第2个车队的最佳匀速行驶速度,以此类推可得到各个重组车队的最佳匀速行驶速度。
综上所述,本文研究提出的基于车路协同的公交车队速度控制方法包括以下步骤。
步骤1根据式(16)确定下游站点能够服务的通过交叉口的协同车队的最大长度。
步骤2根据式(3)统计能够通过速度调控模式实现不停车通过交叉口的公交车辆数。
步骤3确定步骤2中满足串车预防约束的公交车辆数,核实其是否超过步骤1中确定的协同车队的最大长度,超过部分编入下一绿灯相位的协同车队,然后结合下游站点泊位能力约束对协同车队进行重新编组。
步骤4结合实际情况,确定协同车队头车通过交叉口的速度V1,交叉口下游站点的泊位数量与平均服务时长等参数取值,根据式(17)确定各个重组车队通过交叉口减速分离之后的最佳匀速行驶速度,并向各个重组车队发布速度指令。
2 实例分析
2.1 试验设计
选取苏州市竹园路公交客运走廊上的滨河路交叉口为仿真交叉口,如图4所示,选取由西向东方向紧邻滨河路交叉口下游的赛格电子市场站点为仿真公交站点,即选取由滨河路交叉口到赛格电子市场站点(由西向东方向)中间路段为仿真路段(图4中红线所示),利用VB(visual basic)对微观仿真软件VISSIM二次开发进行仿真,对本文提出的基于车路协同的公交车队速度控制方法的优化效果进行验证。
案例路段途径有7条公交线路,选择其中直行通过交叉口的4条公交线路(4路、400路、93路、快线1号)作为仿真线路,统计交叉口停车频率,车均行驶延误以及站点串车比例和站点平均排队长度等指标,评价分析本研究提出的运行控制方法的效果。

图4 仿真路段示意图Fig.4 Illustration of simulation case
通过对该公交走廊进行现场调查,滨河路与竹园路交叉口对应的相位配时如图5所示;根据历史交通数据与竹园路交通限速情况,上述4条直行线路的公交流量(Qb)与本文研究提出的控制方法中其余需标定的参数如表1所示。
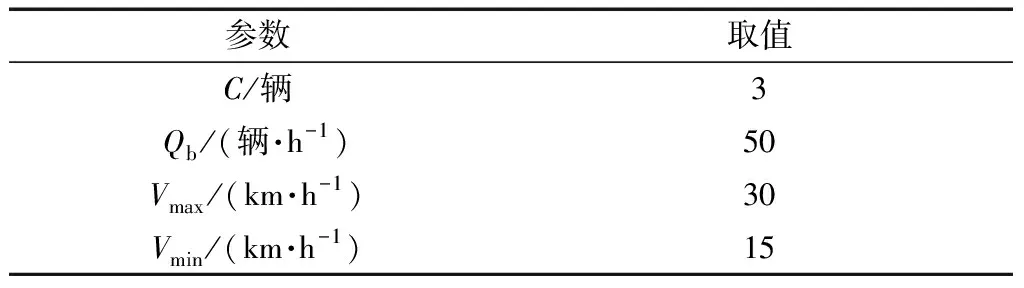
表1 参数标定值Table 1 Calibration of parameters
2.2 试验结果与分析
按照本文提出的基于车路协同的公交车队速度控制方法,搭建VISSIM仿真环境。各条线路的公交车辆仿真输入采用以平均间隔为参数的泊松分布随机生成,即λ=72 s,仿真时长设定为3 600 s。同时,为减少仿真结果的偶然性偏差,保证结果的有效性,参考文献[19],本研究同样选择采用10个不同的随机种子分别进行仿真。统计对比现状方案(方案1),不考虑串车预防与下游站点泊位数量约束的车速调控策略(简称无约束速度调控,方案2)以及本研究中控制方法(方案3)的交叉口停车频率、车均行驶延误、站点串车比例以及站点平均排队长度,比较结果如图6所示。
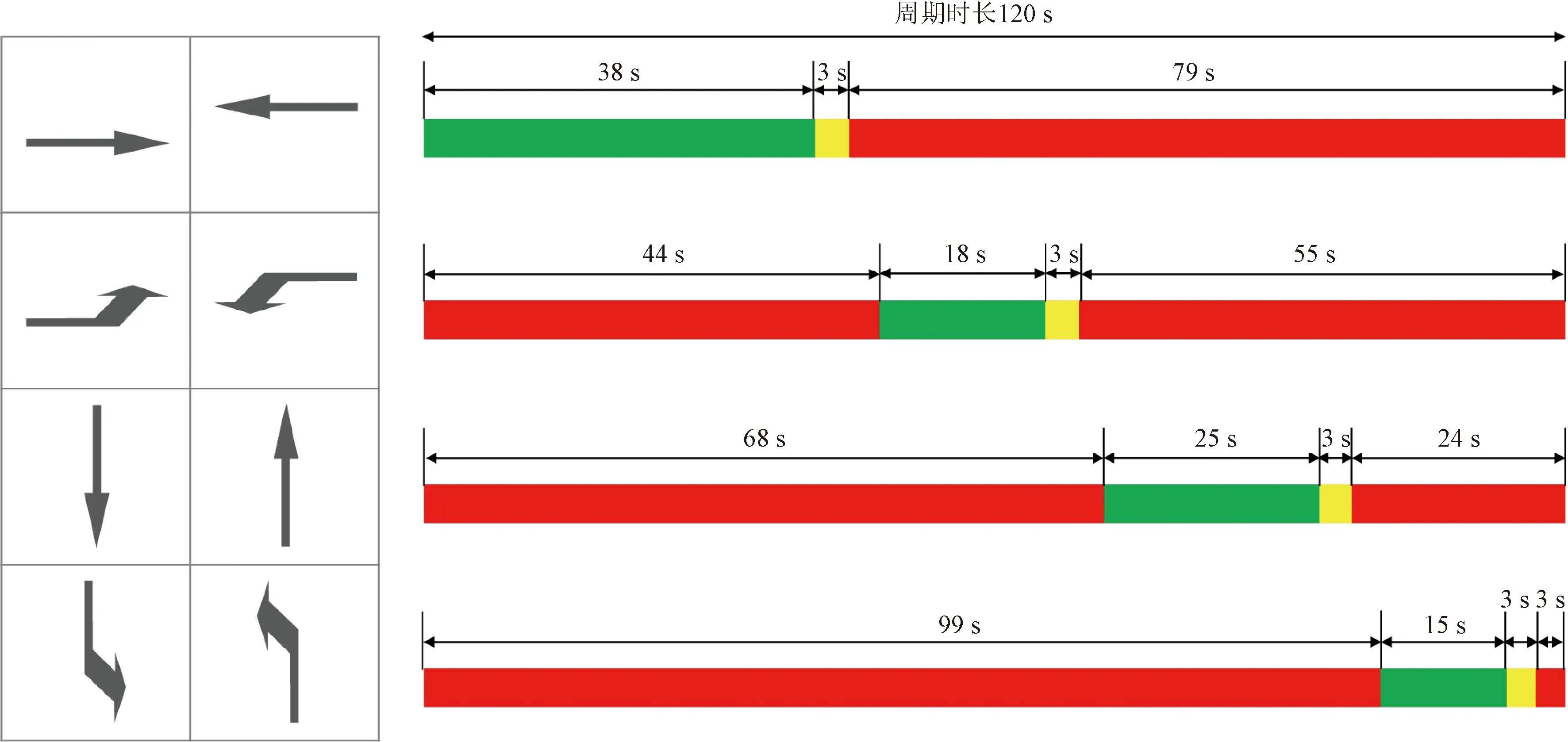
图5 仿真路口相位配时图Fig.5 Illustration of signal phase scheme
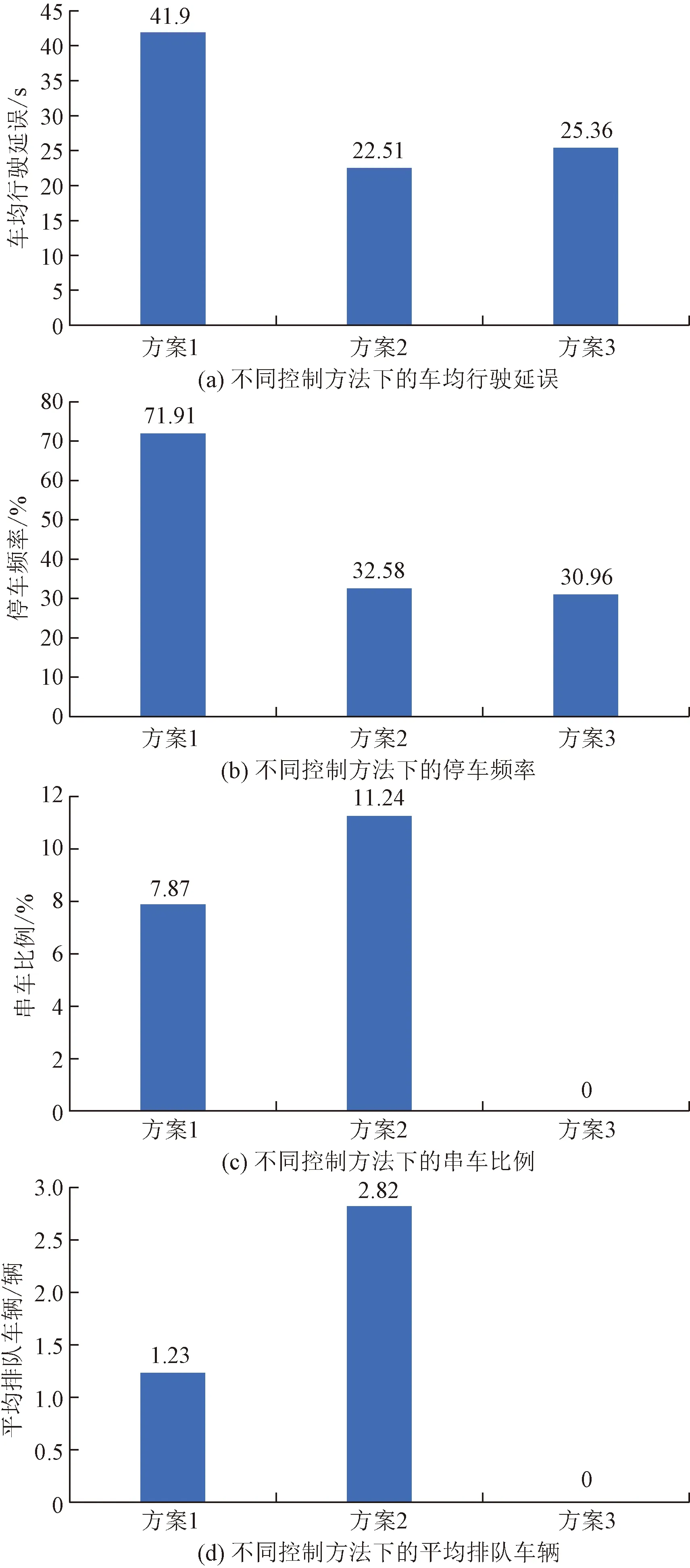
图6 仿真结果比较Fig.6 Comparison of simulation results
通过方案2与方案3的结果发现,对公交车辆实施速度调控可以有效降低其在交叉口的停车概率并降低其通行延误。然而,如果速度调控策略仅考虑交叉口通行效率而不考虑串车预防与下游站点泊位数量约束,会导致同一线路车辆之间串车比例增加约11.24%,致使同时抵达下游站点公交车辆接近站点泊位数的两倍,即平均排队长度(2.82辆)接近泊位数。相反,当速度调控策略中引入串车预防与下游站点泊位数量约束机制后,属于同一线路的车辆可以有效避免发生串车现象,也可以避免信号控制交叉口紧邻下游站点的排队进站情况,减少站点排队延误。因此,本文研究提出的考虑协同车队准入机制的速度调控方法能显著降低公交车辆的交叉口停车延误,且相比于无约束速度调控方式,能以较小的交叉口延误增加为代价消除车辆串车以及下游站点排队进站现象。
3 结论
针对公交运行过程中的交叉口延误、车辆串车以及站点排队进站等问题,基于车路协同环境,本文研究提出考虑协同车队准入机制的速度调控模式来解决上述现实问题,即通过优化调控公交车辆的行驶速度,引入串车预防与下游站点泊位能力约束的准入机制,在交叉口上游区域实现协同车队的重组,在站点上游区域实现协同车队的分解,降低公交车辆的进站延误。研究结论包括:①相比于传统的站点控制模式而言,车速调控模式让公交车队在区间范围内动态调整互相之间的相对位置,服务质量提升效果更好且乘客感受更佳;②相比于公交优先信号控制模式而言,车速调控模式让公交车辆去动态适应信号控制参数,降低公交车辆通行延误的同时也减轻了对社会车辆的影响;③相比于无约束的车速调控模式而言,本研究提出的考虑协同车队准入机制的车速调控模式能在降低信号控制交叉口停车延误的同时,兼顾串车预防与下游站点泊位能力需求。研究结果对于提升公交运行效率、改善服务可靠性有重要的实践价值。
本文研究提出的控制方法仅对协同车队车速进行调控,下一步工作可以考虑将交叉口信号控制和协同车队车速调控相结合,构建双向协同调控模型,更大程度提升公交车辆的交叉口通行效率。