硬质路面条件下履带车辆转向模型分析及验证
2023-02-27张瑞增龚建伟陈慧岩刘海鸥卢佳兴
张瑞增,龚建伟,陈慧岩,刘海鸥,卢佳兴
(北京理工大学 机械与车辆学院,北京 100081)
0 引言
相比于其他类型车辆,履带车辆最为显著的特点是其负重轮不直接与地面接触,而是通过履带与地面接触。履带的引入能够平滑路面粗糙,分散负重轮压力,有助于提高附着力,因此履带车辆的平均地面压力小,牵引力大,能够在泥泞、软质沙地、陡峭坡地以及碎石滩等极端野外环境下行驶[1],相比于轮式车辆具有适应范围广、通过性强的优点,广泛应用于军事、救援、工程机械和农业领域。
履带在提升车辆适用性的同时也带来车辆动力学建模与控制难题。履带接地形状为窄长的带状,履带的受力分析必然会用到积分或者求和,这意味着履带车辆动力学模型复杂度较高;履带分散了负重轮压力,在一般路面条件下,实际接地压力既非集中载荷也非均布载荷,而是一种呈现多峰的分布形式,即在履带-地面剪切位移积累的过程中垂向负载持续变化,这意味着剪切位移的积累并不是简单的速度对时间的积分,还需要考虑垂向载荷的变化。
现有的履带车辆转向动力学模型按照履带地面接触模型分类主要有三种。第一种是经验模型,以俄罗斯[2-3]学者尼基金提出的经验公式μ=为最大转向阻力系数,a为与土壤特性有关的系数,R 为转向半径,B 为履带中心距) 为代表。该经验公式简洁,且在工程上应用广泛。但是,该公式为纯粹的拟合公式,参数a 本身没有明确的物理意义。将其应用于履带车辆动力学控制的问题是其不能描述滑转滑移和转向过程的转向中心的偏移量,也无法描述履带车辆侧向动力学。第二种是基于摩擦理论的模型,实际上能够符合这种理论的地面非常少,文献[4]也证明了这种模型的不可行性,此处不再赘述。最后一种是基于剪切应力-剪切位移理论的模型,以美国学者Bekker等[5]和Bekker[6]的研究最具代表性,其研究以微元为基础,将微元特性积分即得到车辆整体地面特性。由于积分的引入导致其模型复杂度很高,无法应用于履带车辆实时控制中,多作为分析模型分析车辆性能。
加拿大学者Wong 等[4]在Bekker 研究的基础上对地面力学理论进行了完善和发展。国内王红岩等[7]、魏宸官[8]和余群等[9]都曾对履带或农用轮式车辆的地面作用关系进行过相关的研究,他们是国内相关研究的先驱。文献[7,10]对硬质路面高速履带车辆的转向过程进行了分析,将履带接地压力看作连续线性分布,并将履带转向极横向偏移量引入转向模型,取得了较好的验证效果。文献[11]将履带接地压力看作矩形分布,且分布于负重轮下方。文献[12]对履带车辆转向性能参数的测试及获取方法进行了研究。文献[13 -15]用卡尔曼滤波等方法对履带车辆转向过程的滑动参数进行预测,文献[16]采用GMM-GMR 模型对道路阻力系数与转向阻力系数进行估计。文献[17]探究了履带张力作用对稳态转向性能的影响。有些学者也对深海
[18]和农用履带式车辆[19]进了相关的研究。国外近年也针对履带车辆转向过程进行了一些研究,文献[4]采用对地面剪切力积分的方法对硬质路面的稳态转向进行了研究。文献[20]认为履带接地压力集中于负重轮下的单块履带板上,并且用离散微元求和的方法对非稳态转向进行了分析,而文献[21]则提出了将履带看作特殊布置的轮子进行多体模型分析的方法。上述研究大都更加关注履带与地面之间的剪切关系,将履带接地压力看作连续线性载荷或者集中载荷。实际上,履带车辆在常见土壤条件下,接地压力均呈现多峰分布形态[22]。
本文主要有以下贡献:1)在前人研究的基础上,考虑履带接地压力的实际情况,进一步完善了基于剪切应力-剪切位移理论的履带车辆动力学分析模型;2)在上述模型的基础上,借鉴了轮式车辆轮胎侧偏角的概念,在保证模型精度的基础上大幅度简化模型,使其在复杂度上可以应用于无人驾驶履带车辆轨迹控制方法;3)通过实车试验对上述模型进行了验证。
1 履带车辆接地压力分布分析
1.1 系统描述与模型简化
履带接地压力的分布体现了履带与地面在垂直方向的交互关系,垂向压力分布的大小与形态会直接影响履带在水平方向的受力情况,水平方向的受力情况则会直接影响到履带车辆的驱/制动和转向性能。因此,为了对履带车辆转向过程进行分析,必须首先对履带接地压力分布进行分析。
履带车辆负重轮的载荷施加在履带上后变为履带与地面间的分布载荷,且地面越松软、履带张紧力越大,履带和地面间的载荷分布越均匀。为了研究方便通常假设履带接地压力为连续线性分布[7]或者呈矩形分布[17],但是这两种假设形式都不能很好的对履带接地压力进行拟合。Bekker等[5]将车轮和履带间的作用力看作集中载荷,忽略了车轮的形状,对负重轮之间的接地压力分布进行了分析,分析认为负重轮间的履带方程为悬链线。Garber等[22]在Bekker 研究的基础上,考虑车轮形状,接地过程中履带张力的变化,形成了包括车辆质量、履带形状、负重轮形状与数目、悬挂与履带张紧装置刚度、预紧力等在内的15 个车辆设计参数和包括地面刚度系数在内的2 个地面参数的履带车辆接地压力方程。本节对上述研究成果进行归纳总结,在保证模型精度的基础上,将上述模型简化为求解三个未知参数的方程。
为了简化系统,明确研究对象,做出以下假设:
1) 履带车辆在硬质可形变的平坦路面上行驶,各负重轮负重相同;
2) 将履带看作不可伸长的柔性带,且忽略土壤剪切力对履带形态分布的影响;
3) 忽略由于履带接地段变形导致的履带张紧力的变化;
4)土壤压力-沉降关系符合Bekker 等[5]提出的土壤压力-沉降公式p=kzm(p为接地压强,z为地面沉陷量,k 和m 为接地压力系数),且m=1。
履带局部与地面接触后的变形如图1 所示。图1 中:坐标系Oxz 以水平面上两负重轮中间位置为原点,l 为轮心到原点O 的纵向距离,s 为履带最大下沉量,rw为负重轮半径,ωw为负重轮角速度,点M(0,zM) 为履带接地段的最高点,点C(xC,zC) 和点F(xF,zF) 分别为履带环绕负重轮的部分与负重轮之间部分和履带倾斜段的交点;履带与地面的接触有三种形式,第一种形式为两个负重轮之间的部分,如图1 中曲线MC 段S1所示;第二、三种形式为履带环绕负重轮的部分,以负重轮的最低点为界,与点C相连的为S2,与点F 相连的为S3;φ 为履带与水平面的夹角,φC与φS分别为履带S2和S3对应的轮心角,φF为履带前段与地面夹角;T 为履带张紧力,H和V 分别为履带张紧力在水平和垂直方向的分力,H 为常量。
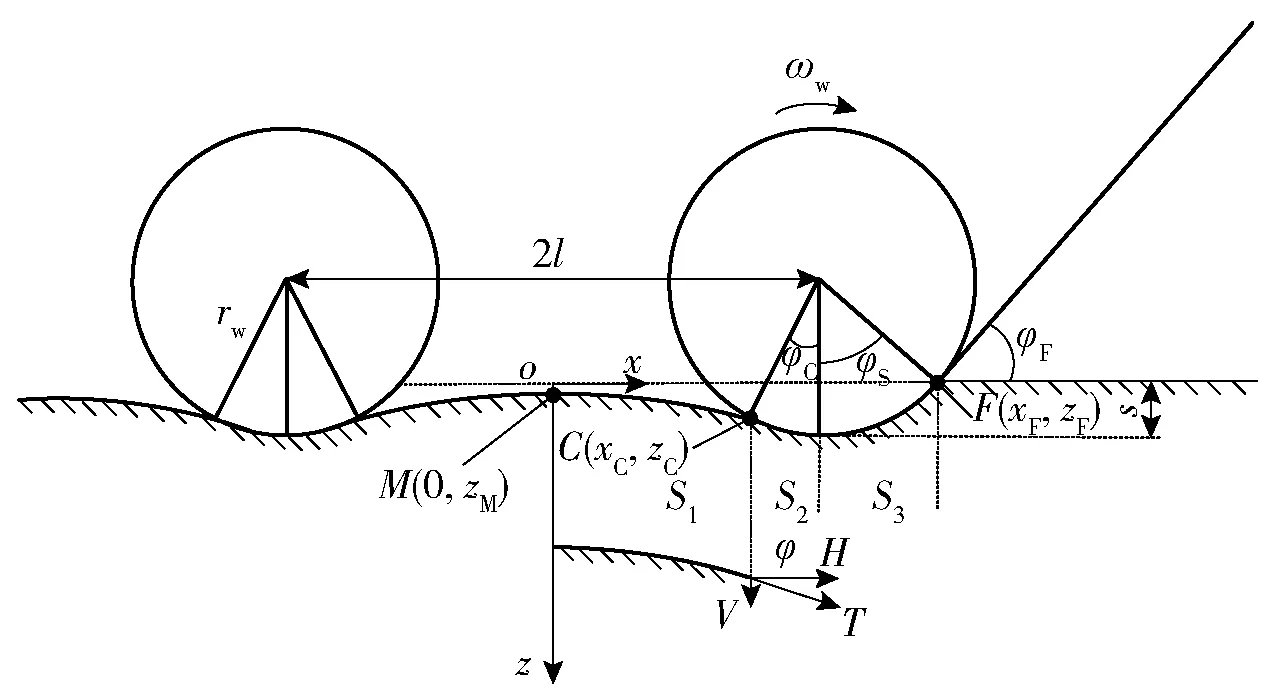
图1 履带土壤接触变形简图Fig.1 Track-ground contact deformation
对于履带段S1有:
由Bekker 等[5]土壤压力-沉降关系公式p=kzm可以得到:
令t(z)=dz/dx 有
由于m=1,对式(6) 积分可得地面沉陷量关于x 的函数z(x),且履带S1段为悬链线曲线,
履带S1段受到的地面支持力为
对于履带段S2,地面沉陷量关于角φ 的函数为z(φ),
由于履带段S2与履带段S1连接处斜率相同,且履带不可延伸,有
对于履带段S3有
根据车辆垂向受力平衡,可得
式中:W 为车体质量;b 为履带宽度;n 为单侧负重轮数量。由式(7)~式(14) 和Bekker 土壤压力-沉降关系公式即可求得理想状态下履带接地压力分布形式。但是上述求解过程复杂,接地压力分布为多段式,不利于履带车辆转向过程的分析。为简化后续转向动力学模型求解过程,本文结合履带车辆接地压力分布形态,提出了可以调整压力峰在履带方向上作用范围的履带接地压力假设对前述复杂模型进行拟合,如式(15) 所示,
式中:Fi为第i 个负重轮的垂向压力;S 为Fi作用长度;xi为第i 个负重轮中心的横坐标。采用余弦函数拟合履带接地压力的原因主要有二,一是其形态与实际履带接地压力分布形态接近,二是其积分简单且积分结果为常数。
图2 和图3 分别为不同类型、不同履带张紧力的车辆在硬质路面接地压力分布形态以及采用式(15) 的拟合结果对比,计算轮距为0.5 m,图中实线部分为计算曲线,虚线部分为拟合曲线。图2 为对中间负重轮接地压力拟合的效果,图3 为对外侧负重轮接地压力拟合的效果。在中等履带预紧力(10%车重) 情况下,从中等硬度路面(土壤刚度5 000 kN/m3)到硬质路面(土壤刚度10 000 kN/m3),余弦曲线对中间负重轮(图4 中负重轮2 至(n-1)) 下的履带接地压力都有着很好的拟合效果,对两侧负重轮下的履带接地压力在形态上的拟合效果稍差,但是整体上还是有较好的拟合效果,处于可以接受的程度。
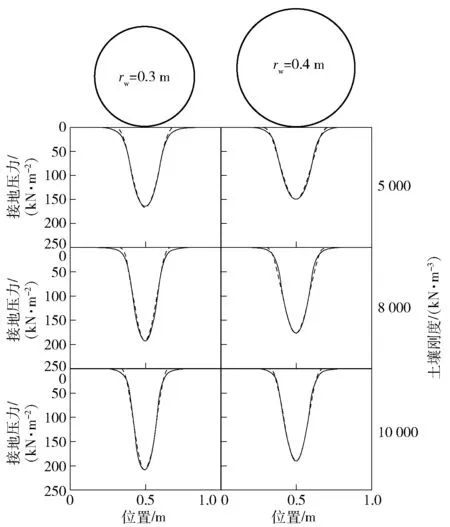
图2 余弦曲线拟合内侧负重轮接地压力效果Fig.2 Curve fitting of track-ground pressure on the middle road wheel
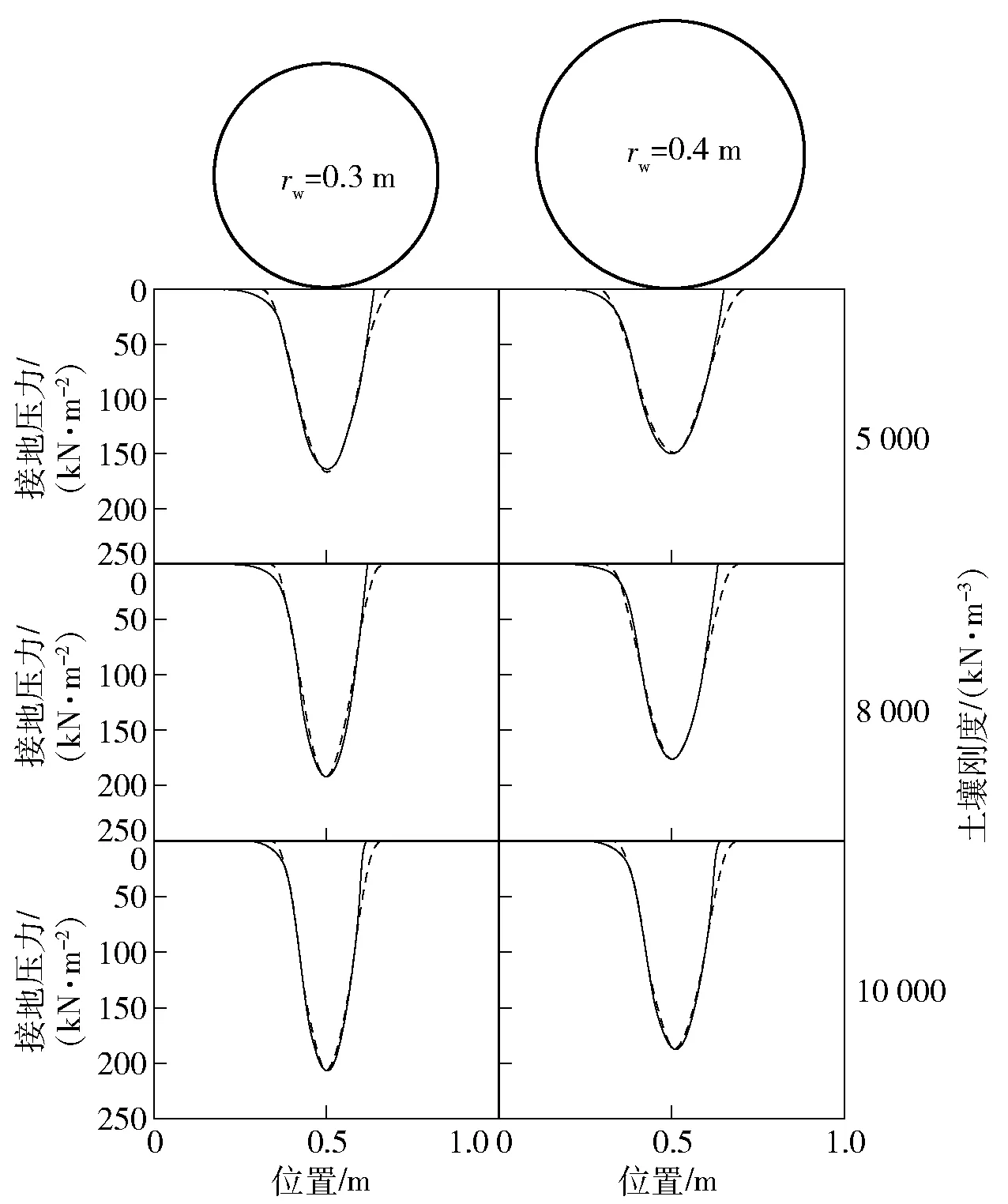
图3 余弦曲线拟合两侧负重轮接地压力效果Fig.3 Curve fitting of track-ground pressure on the outer road wheels on both sides
1.2 履带接地载荷计算
为了降低模型复杂程度,首先假设履带接地压力为集中载荷,作用点为负重轮正下方,而后根据集中载荷的大小对履带接地压力载荷分布进行估计。
图4 为集中载荷作用下的履带接地压力。图4 中CG 为车辆重心,i 为负重轮编号,1 和n特指第1 个和最后一个负重轮,直线OO1为第一负重轮前任意一条与车体垂直的直线,LG和Li分别为车辆重心和第i 负重轮到直线OO1的距离,cx与cy分别为车辆重心到车辆几何中心的侧向和纵向距离,HCG为车辆重心高度,φf与φr分别为履带前后倾角,WN、Wγ和Wβ分别为重力作用在车辆垂向、纵向和侧向的分力,ax与ay分别为车辆在侧向和纵向的加速度,Fi,i/o为地面给第i 个负重轮的支持力,下标i 和下标o 分别代表内外侧履带。
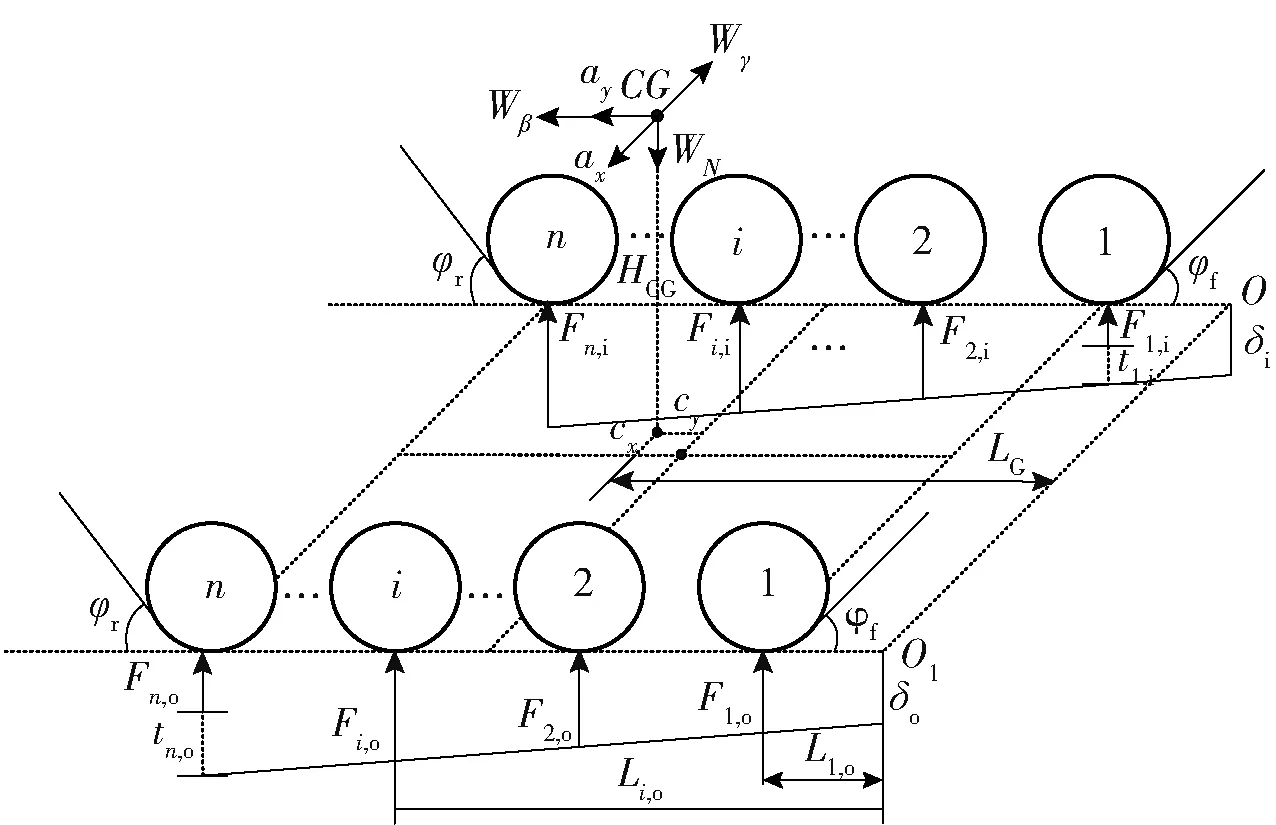
图4 集中载荷作用下的履带接地压力Fig.4 Track-ground pressure under concentrated load
当内侧履带驱动时,
当内侧履带制动时,
式中:Ti和To分别为内外侧履带的拉力;t1,i、tn,i和tn,o分别为履带拉力作用于内侧第一负重轮和内外侧最后一个负重轮的垂向拉力,其与地面支持力共同作用于车辆悬架。
假设相同悬架位移产生的力相同,且呈线性变化,有δi,i/o=δi/o+kδLi,i/o,其中δi,i/o为内侧或者外侧第i 个负重轮承受的支持力,kδ为斜率。通过式(18) 方程组可以求解出三个未知数δi、δo和kδ。
式中:B 为履带中心距。
集中载荷的履带地面支持力Fi在内侧履带驱动时和制动时分别为
引入图5 所示的Oxy 坐标系,yi为第i 个负重轮中心的纵坐标,考虑前述接地压力的分布形式,则第i 个负重轮下的履带接地压力为
2 履带车辆转向过程分析
2.1 系统描述
为了明确履带车辆转向过程,做出以下假设:
1) 履带车辆在硬质路面上以固定半径转向,忽略履带沉陷以及推土效应;
2) 履带与地面的剪切力与该点的剪切位移有关,且履带与地面接触点的切应力与该点的滑动速度的方向相反;
3) 忽略剪切位移计算过程中纵向车速的变化;
4) 转向过程中履带车辆的行驶阻力与直驶时相同;
5) 不考虑车辆悬架以及履带张紧力对转向过程的影响,履带接地压力为多峰的分布形式,峰值位于各负重轮正下方。
建立图5 所示坐标系。图5 中,大地坐标系为OXY,坐标系Oixiyi与坐标系Ooxoyo为车体坐标系,O'和O″分别为内外两侧履带的瞬时转向中心,实线部分为车辆当前位置,虚线部分为之前某时刻车辆的位置,R 为车辆转向半径,R'为车辆重心位置在大地坐标系x 轴方向的投影,S0为车辆重心到转向中心(轴) 的距离,θ 为某时刻车体坐标系x 轴与大地坐标系X 轴的夹角,L 为车辆履带接地长,ψ 为履带上某点P 的剪切速度vj与xO轴的夹角,Fj为该点受到的剪切力,vq为履带牵连速度,vOo为坐标原点Oo的速度。
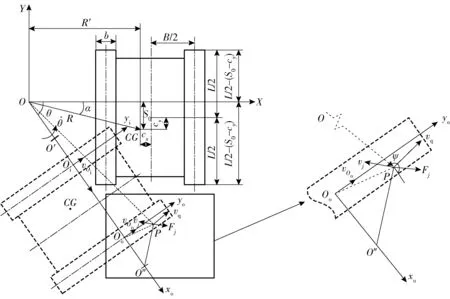
图5 车辆转向过程分析Fig.5 Analysis of racked vehicle turning
2.2 地面剪切位移
通常为了简化模型复杂度将履带接地压力分布看作均匀分布或者长方形分布,这种简化不需要考虑由接地压力变化带来的地面剪切力变化。由前述分析可知,将履带车辆接地压力负载分布看作余弦函数更符合实际情况,但是在这种条件下,由于垂向压力连续变化带来的地面剪切力变化不可被忽视。
土壤剪切力公式为τ=(c +ptanϕ) (1 -e-j/K),当忽略土壤内聚力和粘附力而只考虑摩擦时,可以写为τ=pμ(1 -e-j/K) 。其中:c 为黏聚系数;τ 为剪切应力;ϕ 为土壤摩擦角;j 为土壤剪切位移;K 为土壤抗剪模量;μ 为履带与地面间的摩擦因数。Garber 等[22]和Wong 等[23]认为履带车辆垂向负载的变化会影响到名义剪切位移的大小,并且有以下关系:1) 当接地压力增加时,名义剪切位移变为压力增加后剪切曲线上相同剪切力对应的剪切位移。如图6 所示,当剪切压力在t1时刻增加到p2时,名义剪切位移由jA变为jB;2) 当接地压力减小时,剪切力等比例减小,名义剪切位移不变。即
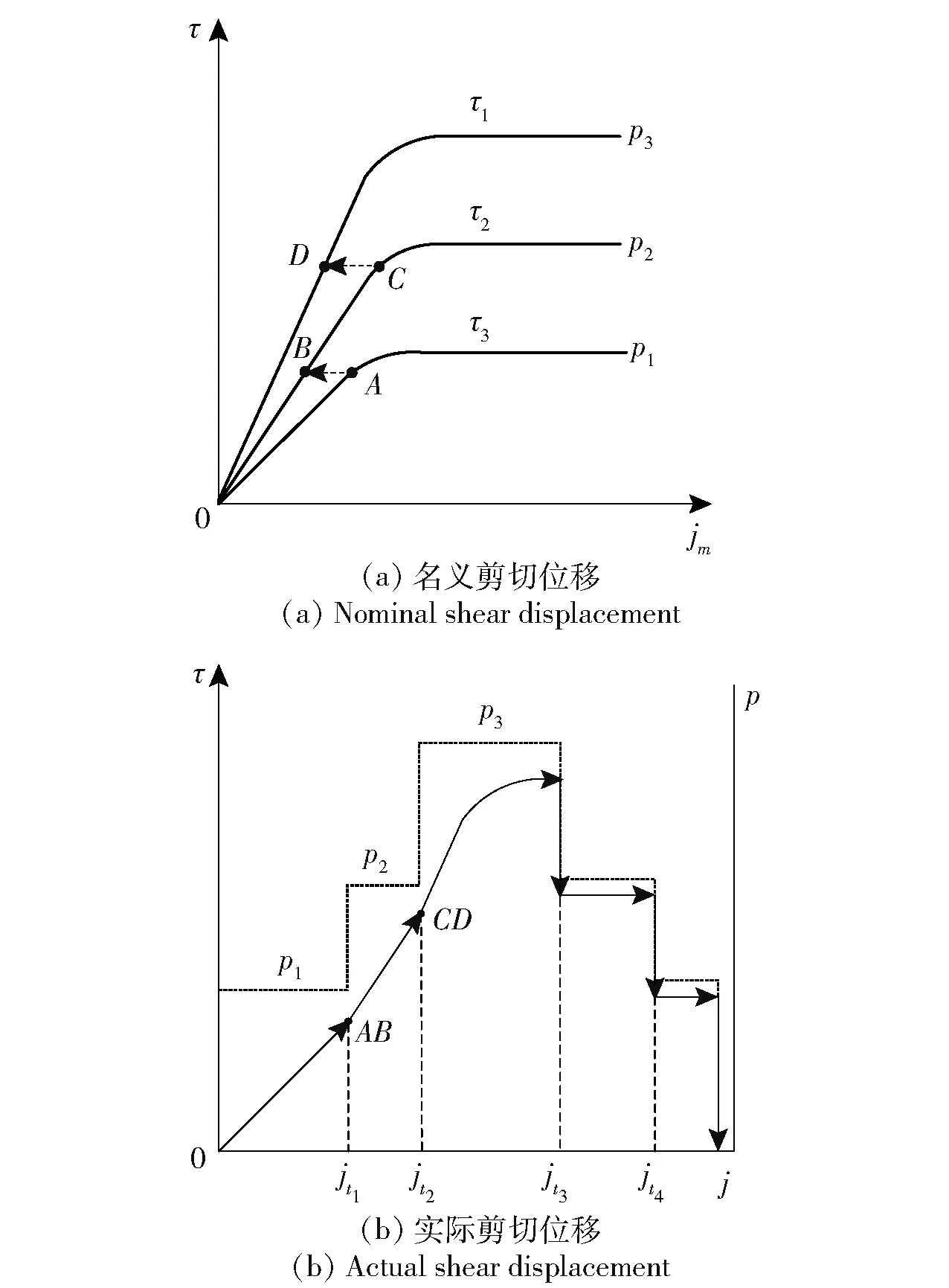
图6 垂向负载-剪切位移变化关系Fig.6 Relationship between vertical load and shear displacement
式中:k 为k 时刻。
履带车辆受力情况与履带和地面间的剪切位移直接相关,剪切位移是剪切速度的积分,因此首先需要对剪切速度进行分析。如式(24)~式(27) 所示,
式中:履带相对于地面的剪切速度在车体坐标系和大地坐标系的分量分别为vjx/y和vjX/Y;r 为主动轮半径;wi/o表示内侧或者外侧主动轮转速,(±) 号外侧取(+) 号,内侧取(-) 号。
由于忽略了剪切位移计算过程中车速的变化,即认为车辆横摆角速度保持不变,对于θ 有
为便于读者理解,这里再次对θ 进行解释,为了计算在图5 实线位置履带坐标系上位置y 处某点与地面的剪切位移,需要对该位置从进入负重轮下压力区间开始,到车辆达到实线位置整个时间区间内与地面的相对速度vj进行求和/积分。因此,θ 为实线位置履带坐标系上位置y 处履带开始进入负重轮下压力区间的时刻(对应图5 中虚线位置) 车体坐标系x 轴与大地坐标系X 轴的夹角。
本文相比之前的研究,最大不同是将履带接地压力分布看作多峰值的形式。履带剪切位移的计算从履带开始承受垂向载荷到垂向载荷消失为止。将履带接地压力看作均匀分布带来的问题是显而易见的,即履带越靠后位置的点剪切位移越大,受力越大,导致转向中心比实际情况后移。实际上在这个过程中垂向载荷已经加载、卸载多次。
如图7 所示,将单个负重轮下接地压力不为0 Pa的履带接地长度分成N 个微元,假设履带车辆做稳态转向运动,履带通过转过单一微元长度的时间为Δt,有
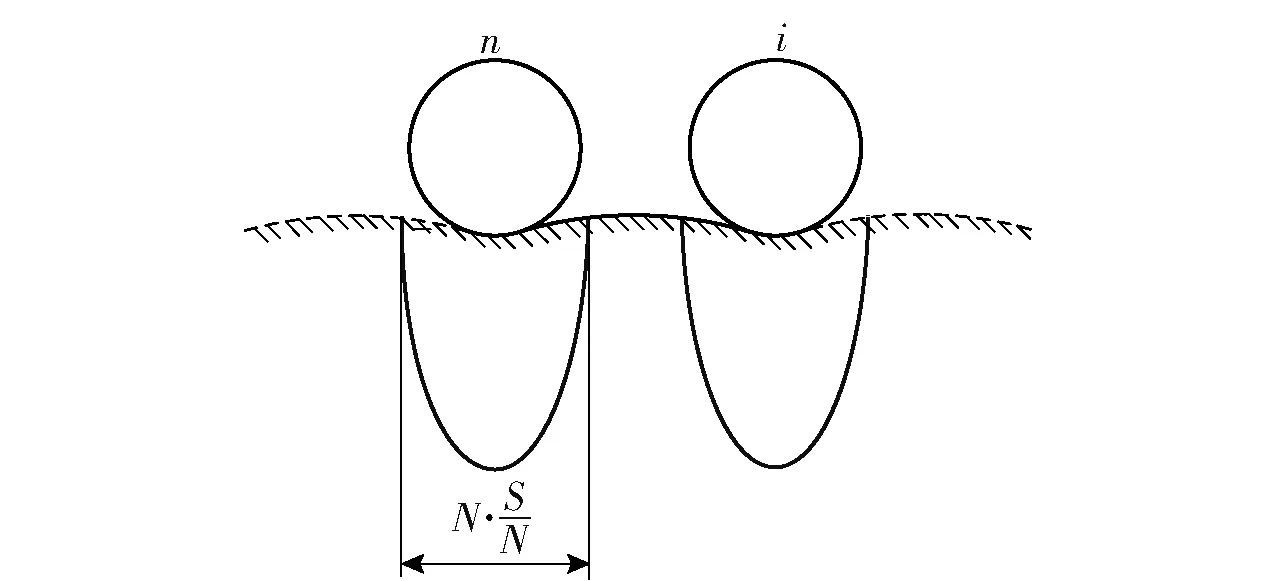
图7 履带微元划分Fig.7 Infinitesimal analysis of a track
对于N 个微元中任意一个微元ε,从进入接地压力区域起,运行到当前位置需要经过的时间为εΔt,ε=1,2,…,N,运行到中间任意位置需要的时间为τΔt,τ=1,2,…,ε。例如,vτjxε表示当前履带第ε 个微元在进入接地压力区域τΔt 时刻的横向滑移速度。
因此,式(21)、式(24)~式(28) 可以改写为在离散条件下,微元ε 在进入接地区域后τ 时刻的状态
将式(22)、式(23) 改为递推的形式,计算履带微元名义剪切位移,
2.3 剪切状态下的履带作用力与运动方程
由于结构的设计,履带或轮胎横向与纵向有一定的差异性[24],为了补偿这种差异性,在横向力的计算中引入系数ζ,因此有
式中:ψiε为履带上某点的滑动速度与x 轴的夹角;分别为第i 个负重轮的第ε 个微元的横向剪切力、纵向剪切力,剪切应力、接地压强和剪切位移i 代表第i 个负重轮;dA 为微元面积。
对式(39)、式(40) 求和,即可得到履带受到的地面剪切力的合力
两侧转向驱动力矩MD,i/o和阻力矩MR,i/o分别为
式中:yiε为第i 个负重轮的第ε 个微元在车辆坐标系下的坐标。
分别在车体坐标系的x 轴和y 轴方向建立力平衡关系,以及对车辆重心建立力矩平衡关系,可以得到履带车辆固定半径转向方程:
式中:m 为车体质量;g 为重力加速度;J 为转动惯量;γ 和β 分别为横向和纵向坡度;Rf,l和Rf,r分别为左右两侧履带滚动阻力。
2.4 履带车辆动力学简化模型
第1.1 节~2.3 节对履带车辆转向过程进行了详细分析,但是其模型为应用了递推与求和的超越方程,难以直接应用于履带车辆的控制。为了提出控制算法适用的履带车辆动力学模型,需要对前述模型进行简化。对于硬质土路面,虽然履带使得接地压力趋于分散,但是压力仍主要集中分布在负重轮下方有限的范围内,与轮式车有很大的相似之处。
如图8 所示,虚线部分为负重轮的俯视图,实线部分为假设的履带接地压力范围,接地压力范围内各点的平均速度为vO,其在x 轴和y 轴的分量分别为vx和vy。履带-地面平均剪切速度为
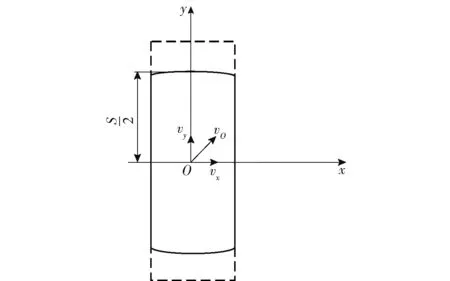
图8 单个负重轮下履带接地状态分析Fig.8 Track-groundcontactanalysis for a single road wheel
履带-地面平均剪切位移为
借鉴轮式车辆动力学模型中轮胎侧偏角的概念,令履带车辆每个负重轮下履带的侧偏角α(与轮式车轮胎侧偏角概念略有差别) 和滑移率λ 为
因此剪切位移j 可表示为
根据土壤剪切力公式可以得到单个负重轮下的履带-地面作用力为
由此可以得到硬质路面上履带车辆整车模型。硬质路面上履带接地压力主要集中在负重轮下方,为了简化模型,可以将履带车辆看作具有与负重轮数目相同轮子的差速转向的轮式车辆,且简化模型的单侧轮子具有相同的转速和滑移率。假设重心在车辆形心,可得
式中:yi,i/o为内侧/外侧第i 个负重轮轮心到车辆重心的纵向距离。轮式车轨迹控制中常常忽略纵向动力学,以降低模型复杂度,保证算法的实时性。同样方法也可以用在履带车辆中,当忽略纵向动力学并将该模型简化为单轨模型时,以转向驱动力矩为控制量,该模型将得到大幅度简化。
3 结果分析与验证
如图9 所示,为了验证本文提出的履带车辆转向模型的准确性,利用无人驾驶混合动力双侧电驱动履带车在不同类型的路面上进行实车验证。试验车辆采用双侧独立电机驱动,实时反馈车辆两侧主动轮转速与转矩;装备有GPS 定位系统和高精度惯性导航系统,实时采集车辆轨迹与位姿信息。试验数据分多次采集自2018 年至2021 年,期间车辆设备安装位置略有变动,且由于试验条件限制,每种场地仅采用一种履带形式。相关车辆和道路参数如表1 所示,路面行驶阻力系数由车辆在平坦路面上以不同车速往返匀速行驶取测试得到。
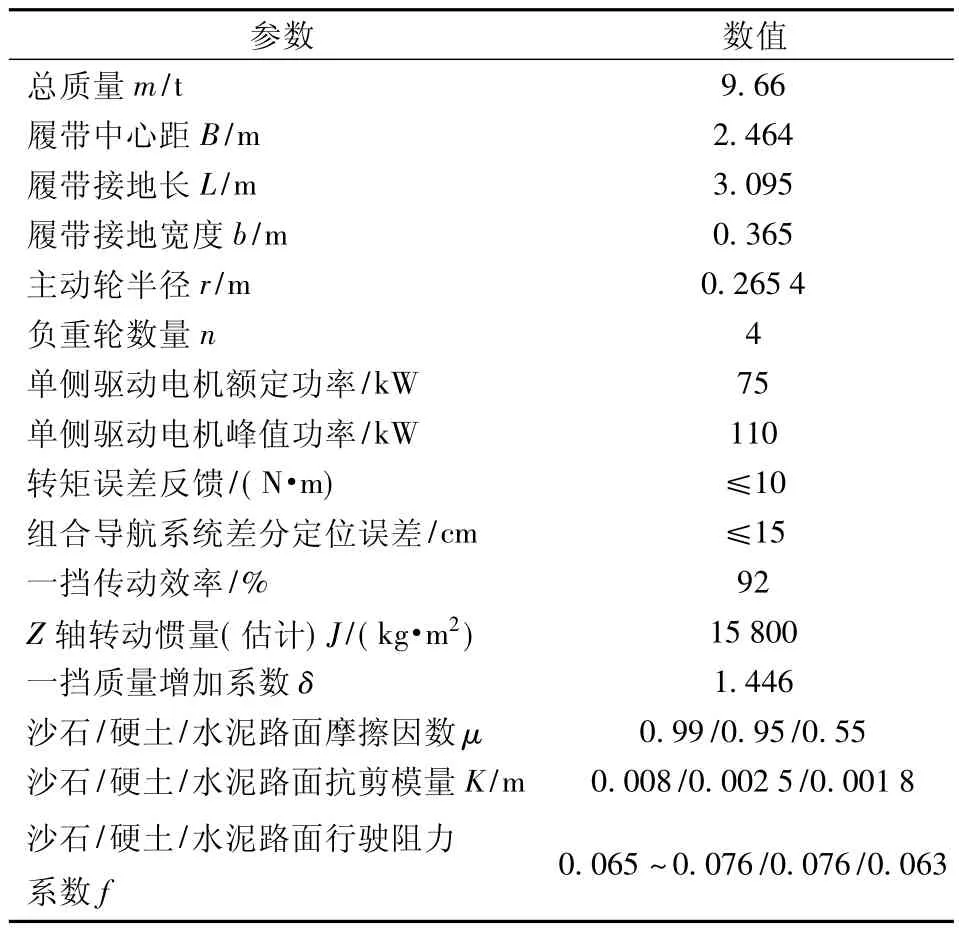
表1 试验相关参数Table 1 Test parameters
试验路面主要有沙石路面(见图9(b))、硬质土路面(见图9(c)) 和水泥路面(见图9(d)) 三种路面条件,在沙石路面条件下分类采集车辆在3 km/h、10 km/h 和15 km/h 下的稳态转向数据,而在硬质土路面和水泥路面采集的数据则主要在2.5~10.5 km/h和3~8 km/h 范围内。试验中车辆在沙石路面和硬质土路面上行驶时使用挂胶履带,在水泥路面上行驶时使用了钢制履带。
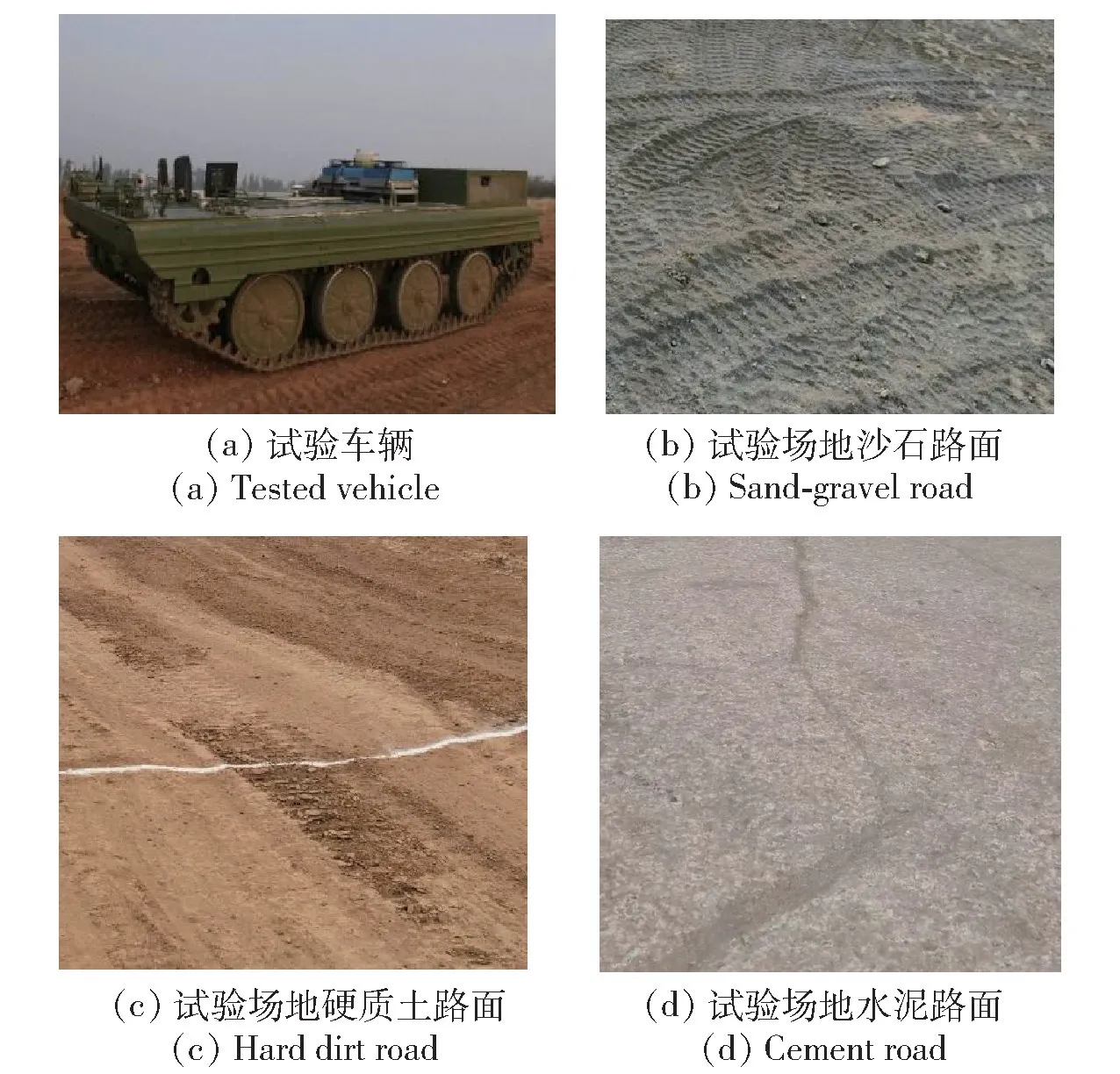
图9 试验采集Fig.9 Test conditions
土壤刚度越大,负重轮半径越小,土壤接地压力分布越集中。不同的压力分布类型会影响到车辆地面模型的验证,以及车辆的动力特性。为了对履带车辆接地压力进行定性测量,将压力传感器埋在地表下约5 cm 处,车辆匀速驶过,实时采集压力传感器反馈数值,并根据反馈车速计算压力峰之间的距离,图9(b) 所示沙石路面试验采集结果如图10 所示,其中ω 为主动轮转速。从图10 中可以看出,履带接地压力以多峰的分布形式集中分布在负重轮下方。
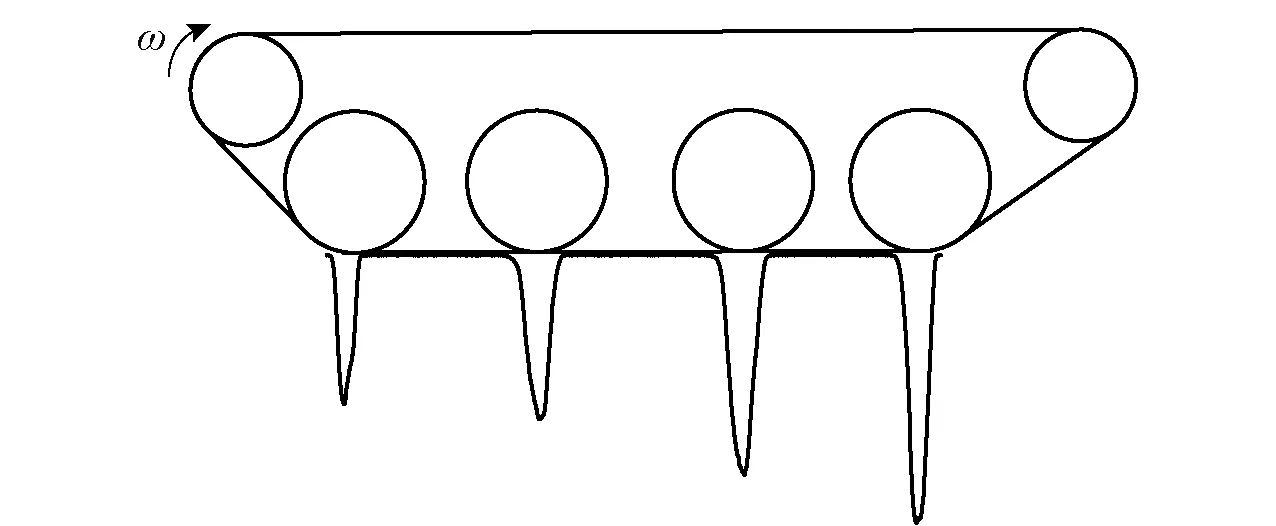
图10 履带接地压力定性测试结果Fig.10 Qualitative test results of track-ground pressure
图11~图15 分别为不同路面、不同车速条件下的模型动力学和运动学关键参数计算结果和验证结果的对比。试验数据中的转向半径由车辆轨迹GPS 数据拟合而来,滑转滑移率由两侧主动轮转速估计而来。由图11~图15 可以看出,随着车速的增加,相同半径情况下内侧转向阻力矩会减小,这主要是由离心力带来的两侧履带载荷转移导致的,在试验数据中也得到了很好的验证。但是,外侧主动轮施加的驱动力矩并没有显著增加,这是因为随着车速的增加相同转向半径的转向阻力矩减小了,这主要是由转向中心的前移导致的。对于滑转滑移率,在较大转向半径时滑转率大于滑移率,而随着转向半径的减小,滑移率超过滑转率,这主要是由于内侧轮速减小、除数减小导致的。不同车速下滑转滑移率的变化并不明显,但是试验数据也有较好的拟合效果。通过图11~图13 与图14~图15 的对比可以看出,不同路面的转矩曲线在趋势形态上有较大的区别,区别主要体现在曲率的变化上,但是滑转滑移率曲线形态的变化较小。通过图11~图15 可以看出,在不同车速、不同路面条件下该模型都有较好的验证效果。
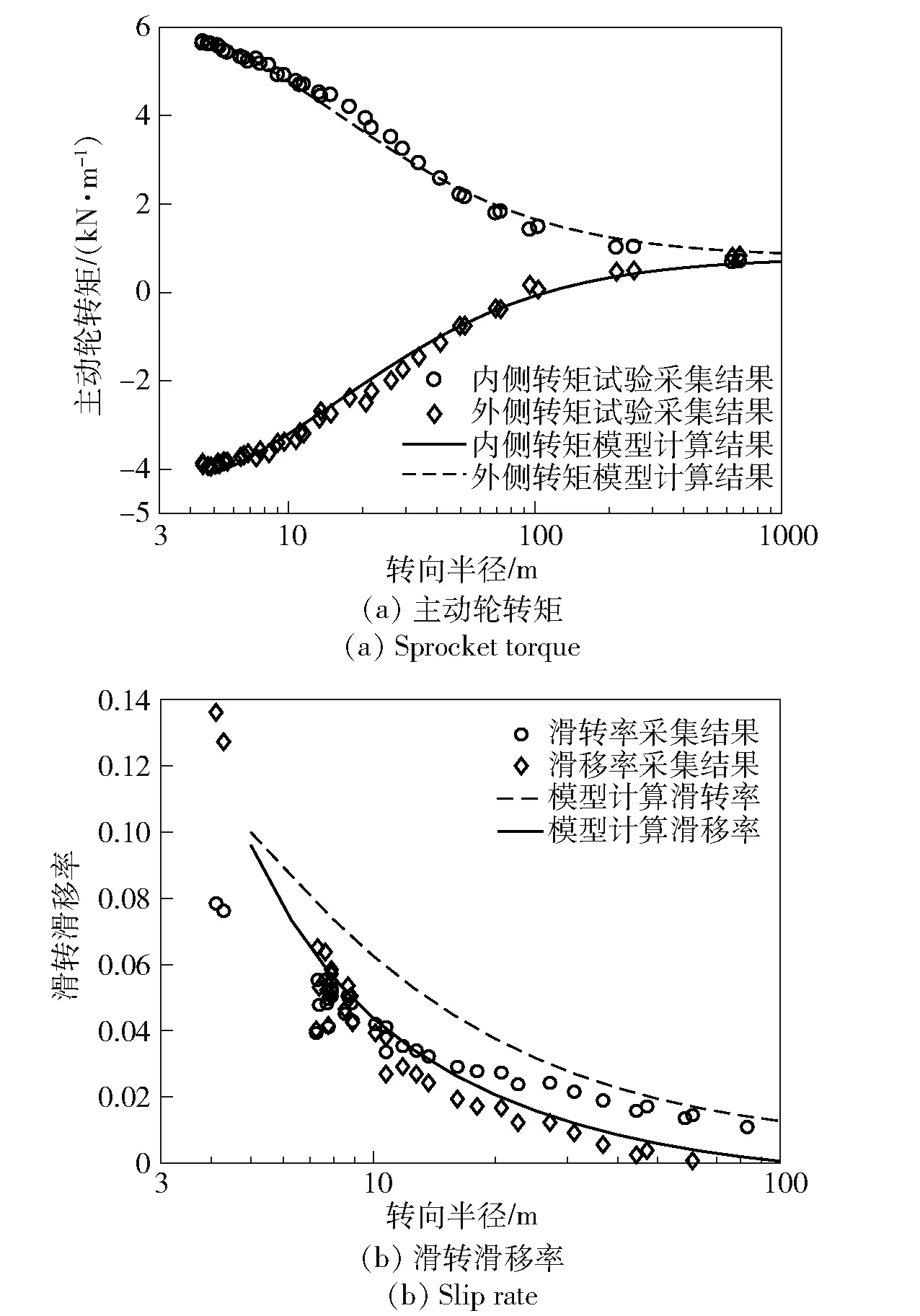
图11 砂石路面3 km/h 计算结果与试验采集结果对比Fig.11 Comparison of calculation and test results on sand-gravel road at 3 km/h
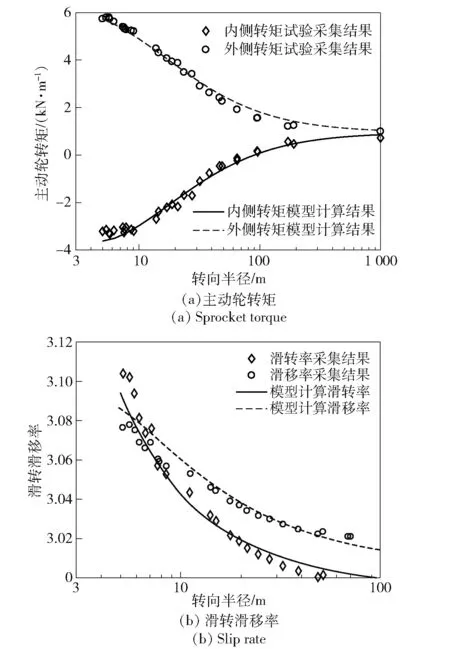
图12 砂石路面10 km/h 计算结果与试验采集结果对比Fig.12 Comparison of calculation and test results on sand-gravel road at 10 km/h
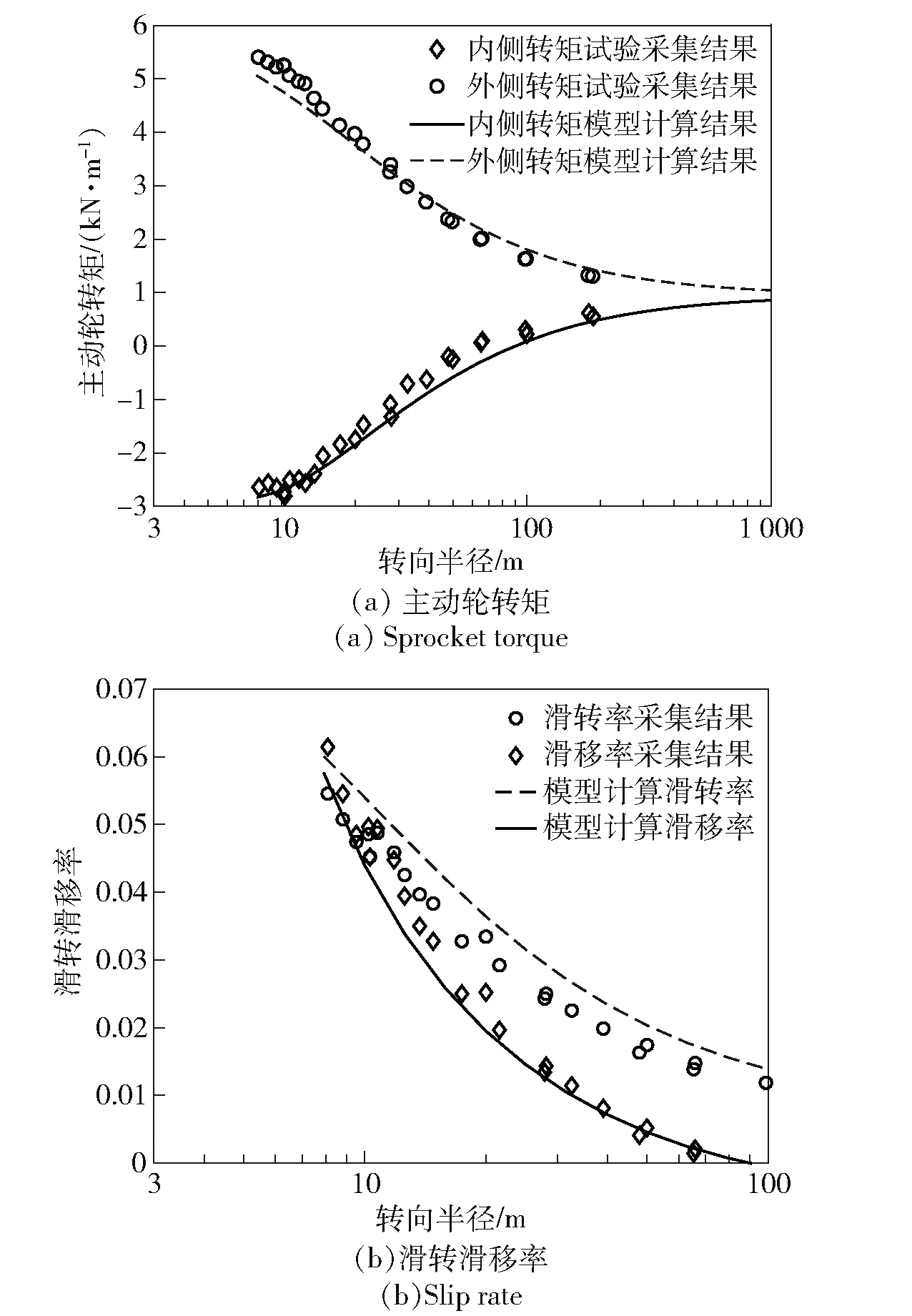
图13 砂石路面15 km/h 计算结果与试验采集结果对比Fig.13 Comparison of calculation and test results on sand-gravel road at 15 km/h
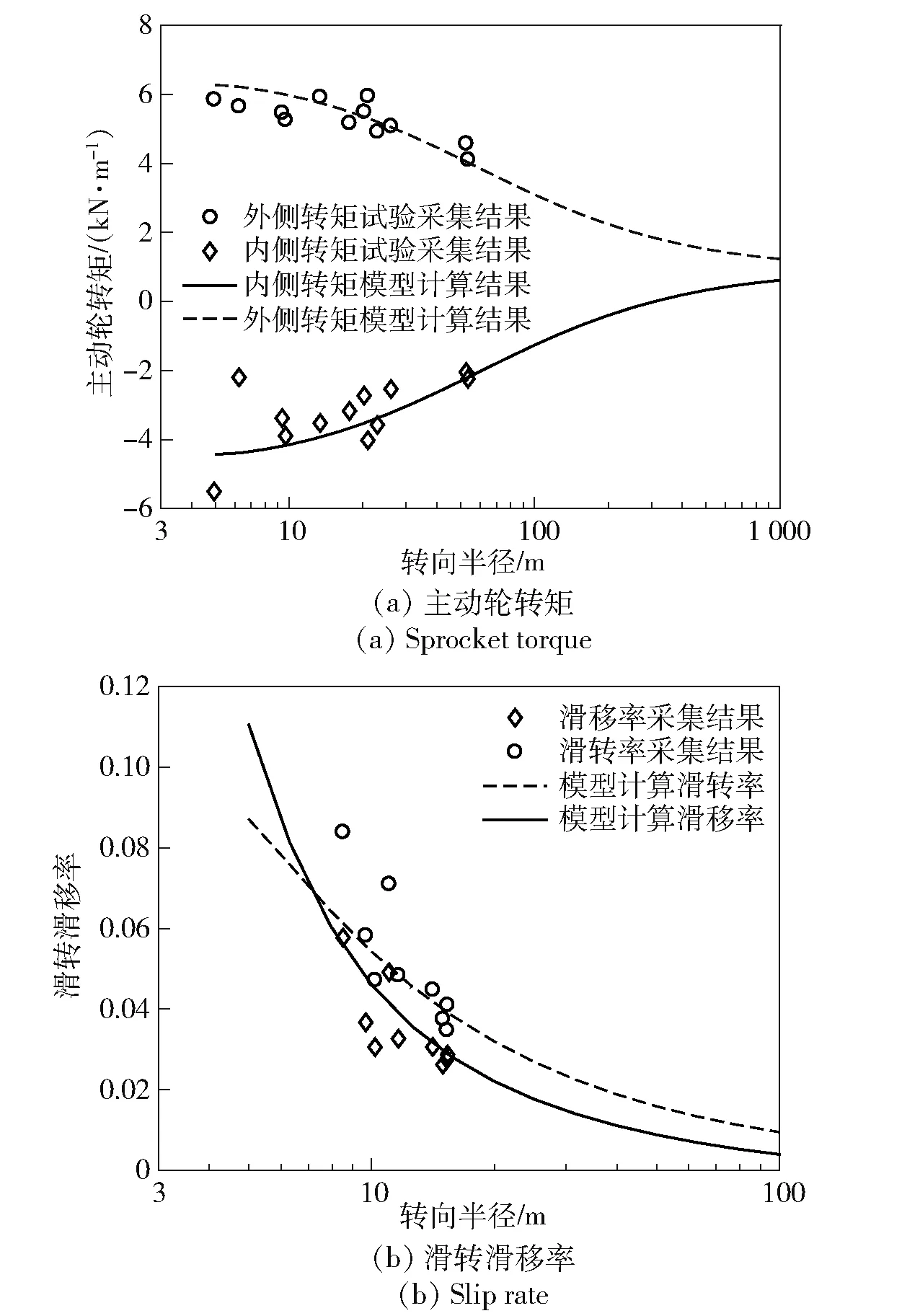
图14 硬质土路2.5~10.5 km/h 计算结果与试验采集结果对比Fig.14 Comparison of calculation and test results on hard dirt road at 2.5~10.5 km/h

图15 水泥路面3~8 km/h 计算结果与试验采集结果对比Fig.15 Comparison of calculation and test results on cement road at 3~8 km/h
简化模型验证结果如图16~图18 所示。需要注意的是,在车辆转向过程中,车辆几何中心侧向速度vx(与转向中心偏移量S0呈比例) 相对纵向速度是个小值,且安装于簧上部分的惯性导航系统无法在震动颠簸条件下精确测量到簧下部分的侧向速度。为了能够验证履带车辆动力学简化模型的准确性,采用1.1 节~2.3 节已验证过的分析模型输出的转向中心偏移量和滑转滑移率作为简化模型的输入,并与实际采集数据结果进行对比。由图16~图18 可以看出,简化模型具有与分析模型相近的精度。侧向力估计在小半径时预测精度略有下降,与土壤为非完全摩擦性土壤有关,即描述摩擦性土壤的地面剪切应力-剪切位移公式τ=pμ(1 -e-j/K) 无法描述非完全摩擦性土壤在剪切位移达到一定程度后,剪切应力下降的现象。但是对于车辆轨迹控制而言,适当的建模误差是可以接受的。另外一个需要特别注意的是在3 km/h时,侧向力估计曲线出现了波动,经检查数据后发现在极低车速时侧向速度vy很小,在模型求解过程中,由于求解精度问题导致求解出的侧向速度出现波动导致的。

图16 简化转向动力学模型砂石路面15 km/h 计算结果与试验采集结果对比Fig.16 Comparison of calculation and test results on sand-gravel road at 15 km/h using the simplified model
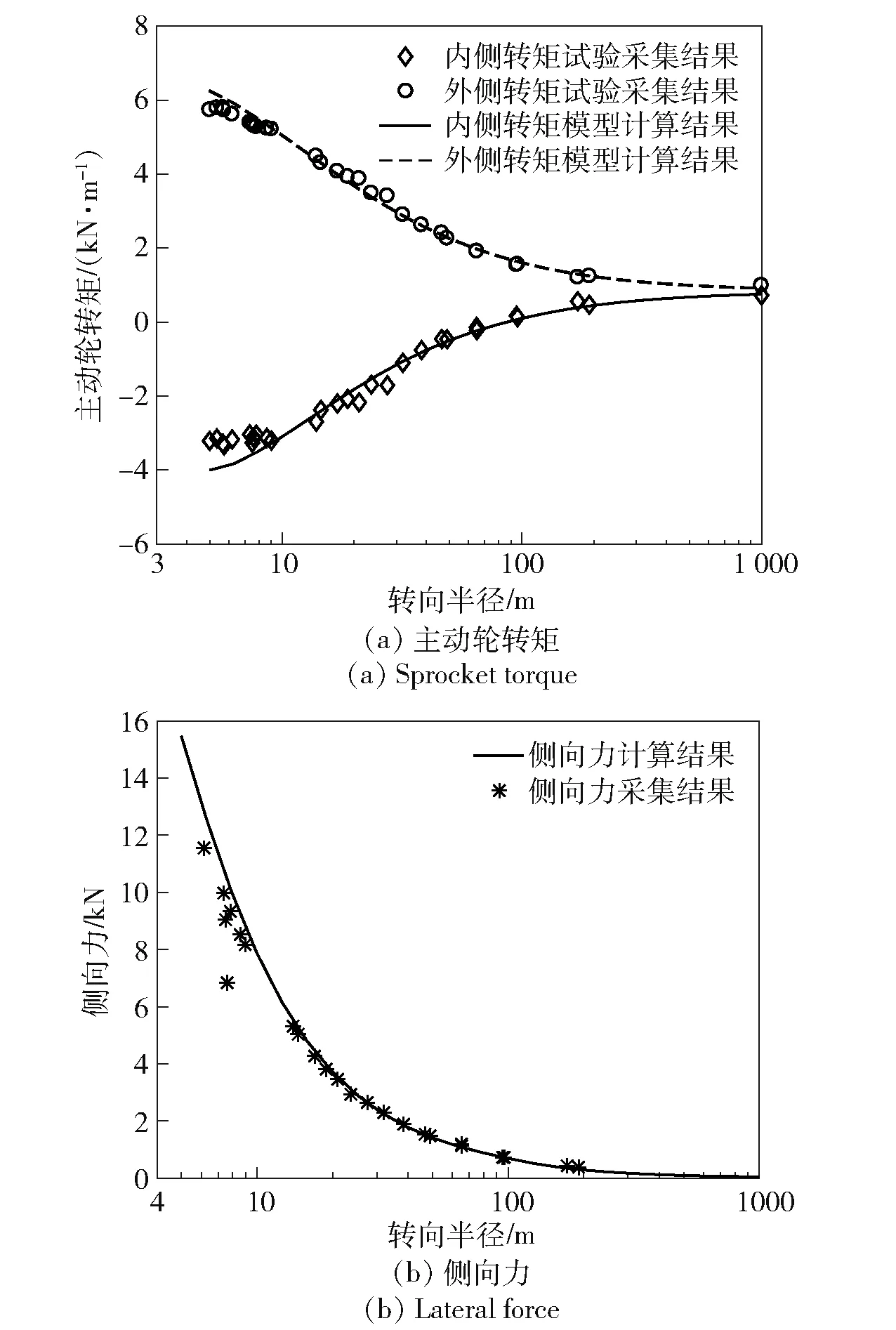
图17 简化转向动力学模型砂石路面10 km/h 计算结果与试验采集结果对比Fig.17 Comparison of calculation and test results on sand-gravel road at 10 km/h using the simplified model
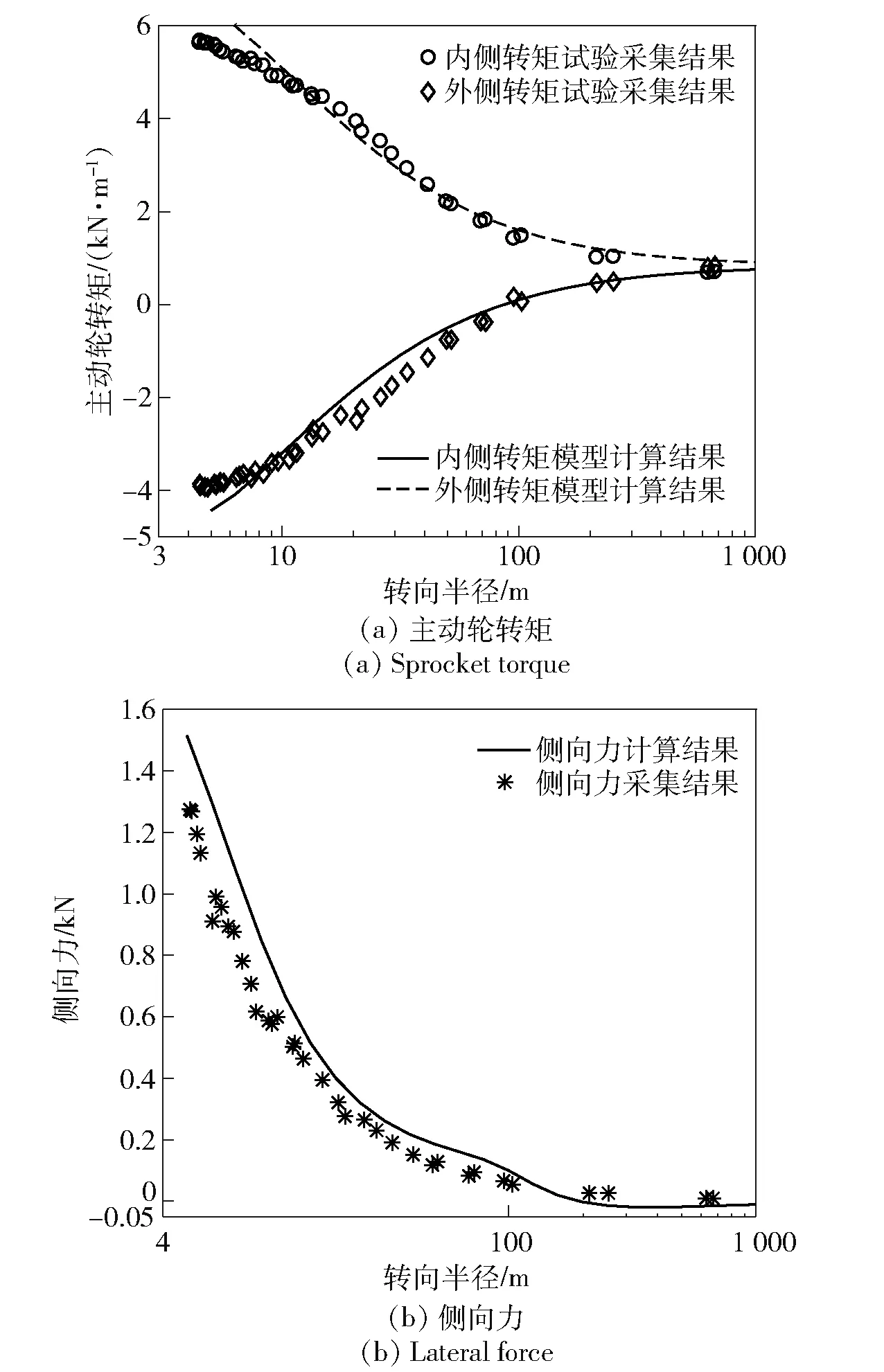
图18 简化转向动力学模型砂石路面3 km/h 计算结果与试验采集结果对比Fig.18 Comparison of calculation and test results on sand-gravel road at 3 km/h using the simplified model
图19 为沙土路面下考虑纵向加速度的模型验证,图19(a) 为车辆轨迹拟合的效果,从中可以看出在相同转向程度(两侧履带转速比值) 下,车速增加对车辆转向半径的影响不大。图19(b) 中曲线均为实际采集数据,从中可以看出估计结果与真实值之间的误差较小。

图19 砂石路面下存在纵向加速度时模型验证效果Fig.19 Model verification effect during acceleration on sand-gravel road
总之,本节试验测试结果与计算结果的对比表明,文中建立的转向模型是准确可信的。
4 结论
本文的主要研究目标有二。一为提出一个更符合实际情况的履带车辆转向分析模型,二为在尽可能保证精度的基础上简化模型,使得剪切应力-剪切位移关系理论能够应用于履带车辆控制。得出以下主要结论:
1) 本文对硬质路面下的履带接地压力的形式与大小进行了分析,根据分析结果将履带接地压力分布模型简化为余弦形式。这是本文相比之前的研究的最大不同,也是能够将复杂分析模型简化的基础。
2)基于履带与地面之间的剪切力-剪切位移关系理论,以及Wong 等[23]提出的垂向载荷变化过程中剪切位移变化的公式,提出了硬质路面条件下的履带车辆转向分析模型,相比于前人研究更符合路面真实情况。
3) 本文提出了一种全新的履带车辆动力学简化模型,该模型引入了轮式车中轮胎侧偏角和滑转率的概念,使得模型得到大规模简化。解决了传统分析模型复杂度过高,无法应用于履带车辆实际控制问题。
4) 通过无人履带平台对上述模型进行了验证,试验结果与计算结果的一致性表明本文建立的模型是准确可信的。
5) 本文为无人驾驶履带车辆轨迹跟踪控制建模提供了一个全新的思路,即在硬质路面上,垂向压力主要集中在负重轮下有限的区域内,可以采用平均值替代的方法避免积分,实现模型的大规模简化。