多轴特种车辆的数据建模方法及横向动力学应用
2023-02-27陈渐伟于传强刘志浩唐圣金张志浩舒洪斌
陈渐伟,于传强,刘志浩,唐圣金,张志浩,舒洪斌
(火箭军工程大学,陕西 西安 710025)
0 引言
多轴特种车辆通常行驶在恶劣的工况下,加上车辆自身结构复杂,因此多轴特种车辆的模型具有较强的非线性特征,难以准确建模。然而,准确的车辆动力学模型在车辆控制、状态估计以及决策规划中都具有极其重要的意义[1-4]。面向车辆动力学建模是一个将车辆的动力学表现抽象为数学方程的过程。按照认知车辆动力学角度的不同,模型可以划分为物理模型和数据模型。
大多数车辆建模是基于第一性原理的物理建模方法。车辆动力学的特征行为被统一建立在牛顿力学体系中,模型的高保真度依赖动力学方程以及物理参数的准确程度。然而,完整的车辆动力学系统是一个复杂的强非线性系统。例如在对车辆轮胎建模时,模型的准确性更加依赖经验模型中的实验参数,这一过程需要专有的实验平台在特定的实验工况下进行测试[5-8]。因此,在对车辆进行物理建模时,研究人员想获取关于车辆完备的参数非常困难且成本高昂。基于物理模型的车辆动力学建模不得不根据应用需求和已知模型参数的限制,对车辆动力学模型做简化处理[9-10],进行不同程度的线性化假设,使得物理模型难以准确反馈出真实的车辆动力学。
近年来深度学习发展迅速,神经网络通过离线训练,可以从数据中挖掘潜在的自然规律[11-13]。车辆在行驶过程中,车载传感器能够提供丰富的车辆状态信息,为建立车辆动力学神经网络模型提供了可学习的数据集,因此一些学者开始采用神经网络对车辆动力学建模。
Pan 等[14]采用神经网络建立车辆纵向动力学模型,网络输入为车辆纵向速度和前轮扭矩,输出为车辆刹车距离。通过与Carsim 仿真测试的结果相比较,仿真结果显示网络模型能够准确预测车辆纵向速度和行驶距离,模型能够应用于车辆实时仿真和控制。DA LIO 等[15]提出一种结构化网络模型对车辆纵向动力学进行了建模。网络输入为纵向速度、质心高度、油门踏板和挡位,依据车辆纵向力的组成结构对输入信息进行分类,构建出结构化网络,仿真结果显示采用结构化网络模型具有更好的泛化性,提高了数据建模的保真度。Rutherford 等[16]采用神经网络建立车辆动力学模型,并详细分析了网络初始化权值与网络大小对网络模型泛化能力的影响,研究发现网络权重初始化影响网络训练的最终结果,随着网络尺度增大,有助于提高网络收敛水平。Cao 等[17]构建了一种分层网络用于建立车辆横向动力学模型。网络模型分为两个网络,第1 层用于预测车辆横摆角速度,第2 层结合第1 层的结果预测质心侧偏角。然而,由于网络整体呈开环结构,模型需要输入转向指令、纵向加速度、速度和历史横摆角速度等。对于网络预测的状态信息,同时也要求实测过程可以采集到,否则网络无法被驱动。
为减少网络的输入数据需求,使网络模型能够递归更新,Hermansdorffer 等[18]在测试过程中利用网络的输出不断更新输入,使得网络模型可以像物理模型一样驱动。虽然网络模型在测试过程中实现了闭环结构,但是在训练网络时仍然是基于开环的网络结构,网络的输入全部采用采集的数据。基于开环结构训练得到的网络参数,虽然能够部署在网络模块中并用于闭环测试,但是由于网络结构和输入数据的来源发生了变化,模型在测试过程中的保真度较低。
为提高车辆动力学数据建模的保真度,本文针对某型特种五轴车辆的横向动力学行为,基于闭环结构的网络模型进行数据建模;构建了一种在闭环条件下的网络训练方法,提高了闭环网络模型的预测准确度。
1 基于物理规律的单轨模型
单轨模型是一种常用的简化车辆动力学模型,如图1 所示。图1 中,Fi为第i 轴(i=1~5) 的轮胎横向力,vx、vy分别为车辆的纵向速度和横向速度,γ 为车辆横摆角速度,Li为轴心至质心的纵向距离,δi为第i 轴的轮胎转向角。
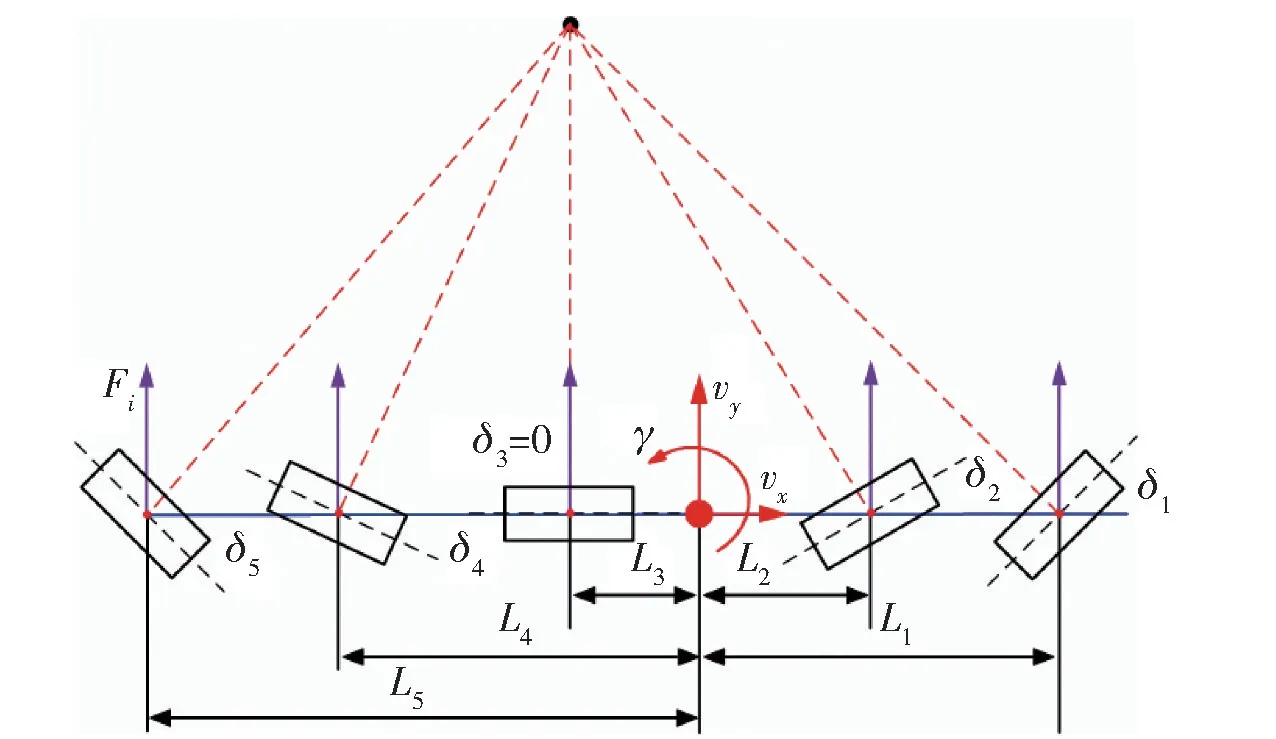
图1 单轨模型Fig.1 Single track model
在对车辆进行受力分析后,建立车辆横向动力学模型如式(1) 和式(2) 所示:
式中:m 为整车质量;Iz为转动惯量。
对轮胎模型进行线性化处理,在侧偏角较小的时候,轮胎模型与侧偏角近似线性的关系如式(3)所示:
式中:Ci为第i 轴的轮胎侧向刚度。在计算各个轮胎的转向角时,通常认为车辆转弯时各个轮胎转向角符合阿克曼转向关系,各个车轮仅有一个转向中心,当转弯角度较小时,可对计算过程做线性化处理。计算结果如式(6)~式(10) 所示。车辆第三车轴通过机械锁死,三轴车轮转向角始终为0°,其余轮胎均可自由转向,方向盘转角δ 与一轴车轮转角的传动比为η。车辆行驶过程中各个车轮的转向角为
因此单轨模型中,车轮各个转向角均可以用方向盘转角δ 计算。将式(3)~式(10) 代入式(1) 和式(2) 中,进行欧拉前向展开,可得离散化的横向动力学模型,结构如式(11) 所示(详细参数见附录A) :
式中:X 为车辆状态变量;A、B 分别为状态方程的参数矩阵;U 为控制变量。
2 闭环结构的网络模型设计
通过式(11) 可以发现物理模型是递归模型,递归过程如图2 所示,通过初始化模型预测变量,向模型输入控制信号和必要的系统变量,模型能够不断更新预测车辆的状态变量。在横向动力学模型中,方向盘转角δ 和纵向速度vx是输入到模型的控制信号和系统状态变量,横向速度vy和横摆角速度γ是模型可预测的状态变量。
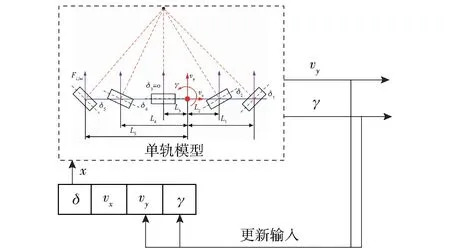
图2 物理模型更新过程Fig.2 Update process of the physical model
为实现物理模型中递归更新的功能,搭建了图3 所示闭环结构网络模型,以映射车辆的横向动力学行为。在闭环网络模型中,模型结构首尾相连,网络输出的状态信息分别是横向速度vy和横摆角速度γ,同时也作为网络的输入信息与车辆方向盘转角δ 和纵向速度vx信息一起组成新的输入序列x,以驱动网络模块对下一时刻的车辆状态信息进行预测。图3 中,h0表示GRU 模块的初始状态,通常设置为一组为0 的序列。
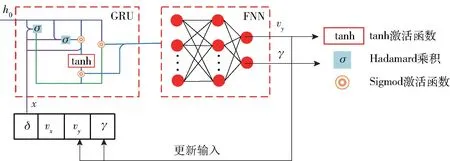
图3 闭环网络模型Fig.3 Closed-loop network model
为便于对比分析训练方法对闭环网络模型准确性的影响,参照文献[18]设置闭环网络模块由一个递归网络GRU 和一个前馈网络FNN 组成。网络模块的主要参数如表1 和表2 所示。
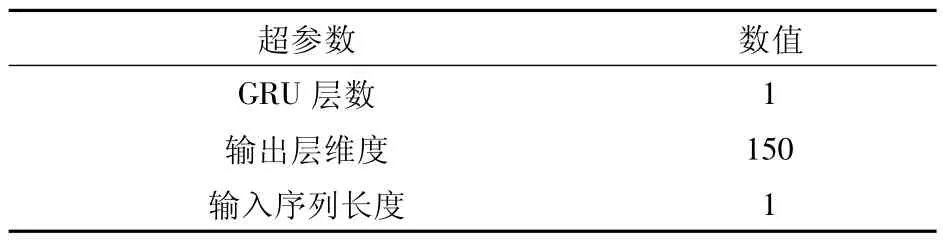
表1 GRU 模块参数Table 1 GRU module parameters
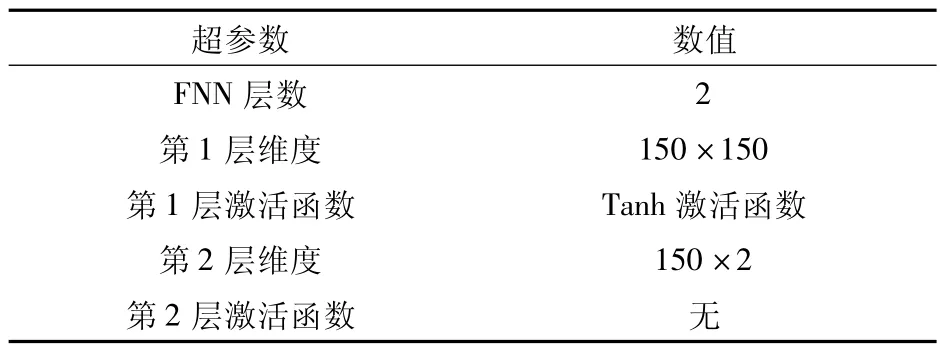
表2 FNN 模块参数Table 2 FNN module parameters
3 数据集建立
3.1 Trucksim 仿真模型实验验证
数据建模依赖于大数据集,然而实验获取数据的成本较为高昂,因此通过Trucksim 搭建目标车辆的仿真模型以生成数据集。Trucksim 是一种参数化的车辆建模软件,通过导入轮胎模型等关键实验数据,实现精细化的车辆建模。为测试仿真模型的准确性,采用一段实车转弯工况进行验证,实验平台如图4 所示。方向盘转角传感器采用UX-2D 型号转向盘转动量转矩检测仪;Speedbox-mini 用于采集车辆行驶过程纵向车速、纵向加速度、横向加速度等信息;GPS、INS 用来测量车辆姿态角和角速度等信息。传感器信号通过CAN 总线输出至数据采集系统,并使用Race Technology 和DEWEsoft-X3 对实验数据进行后处理。
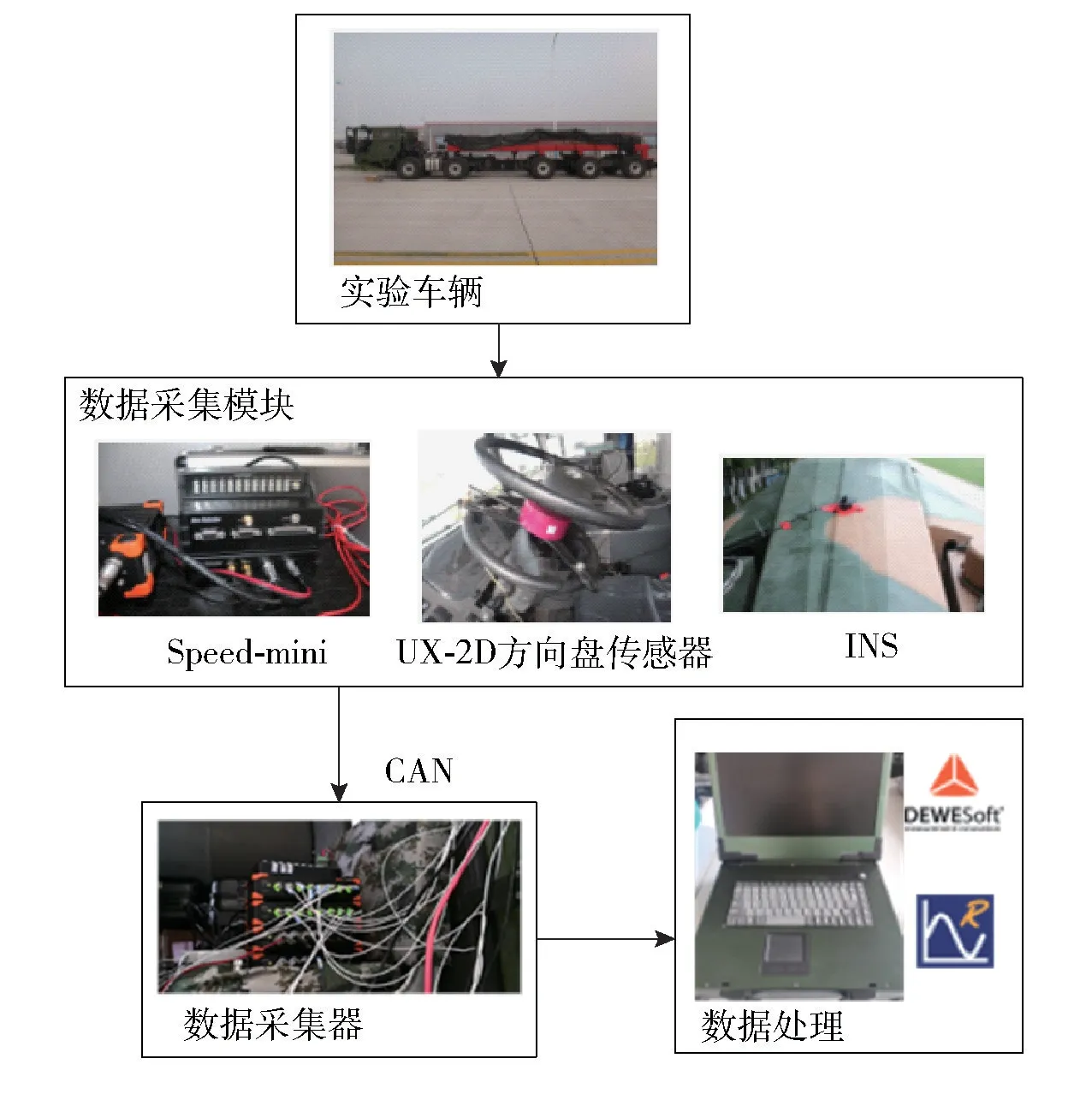
图4 实验平台Fig.4 Experimental platform
实验路径如图5 所示,车辆行驶速度为20~40 km/h 之间变化。在可采集的状态信息中,选择侧向加速度和横摆角速度作为验证Trucksim 模型准确性的指标。验证方法为将图6 和图7 所示的车辆纵向速度信息和方向盘转角信息输入Trucksim中。将侧向加速度、横摆角速度仿真结果与实验数据进行比较,对比结果如图8 和图9 所示,可见实验数据与仿真数据基本吻合。
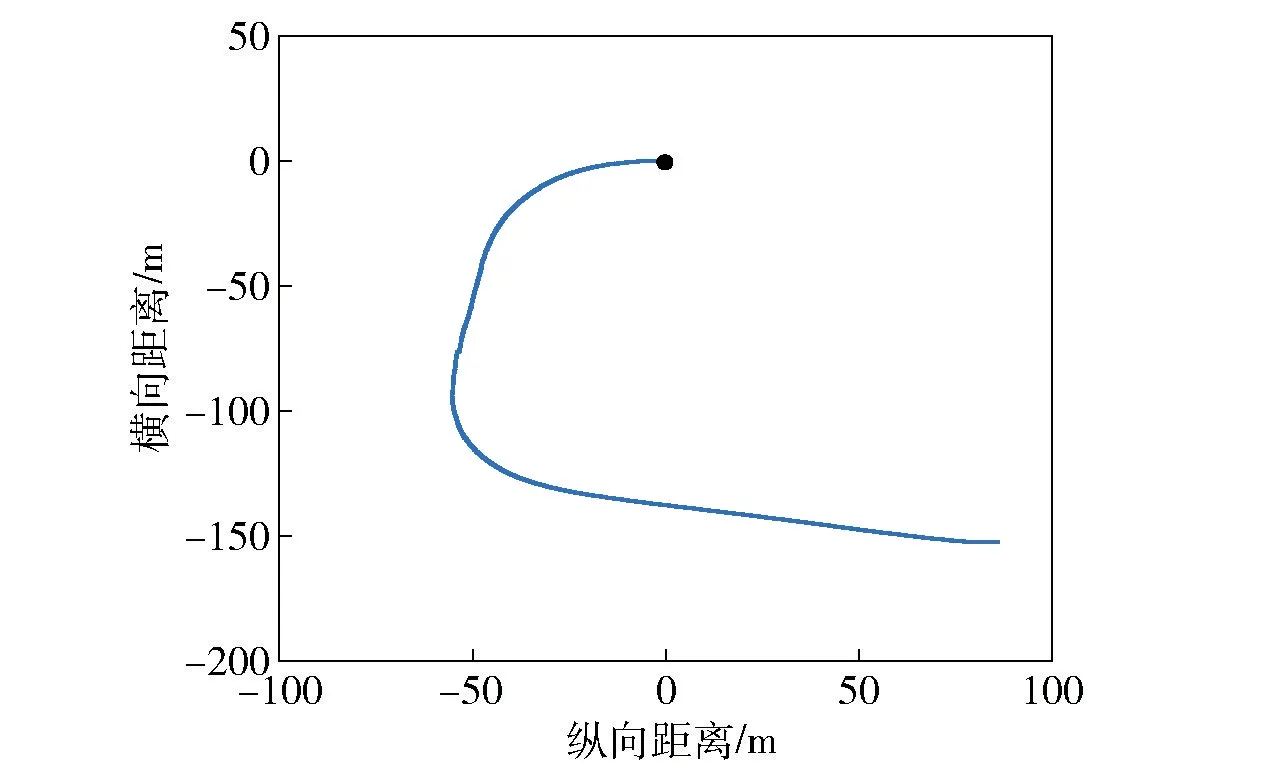
图5 实验路径Fig.5 Experimental path
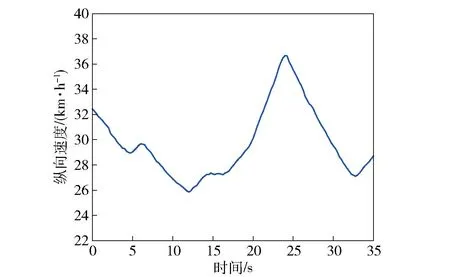
图6 实验纵向速度Fig.6 Experimental longitudinal velocity
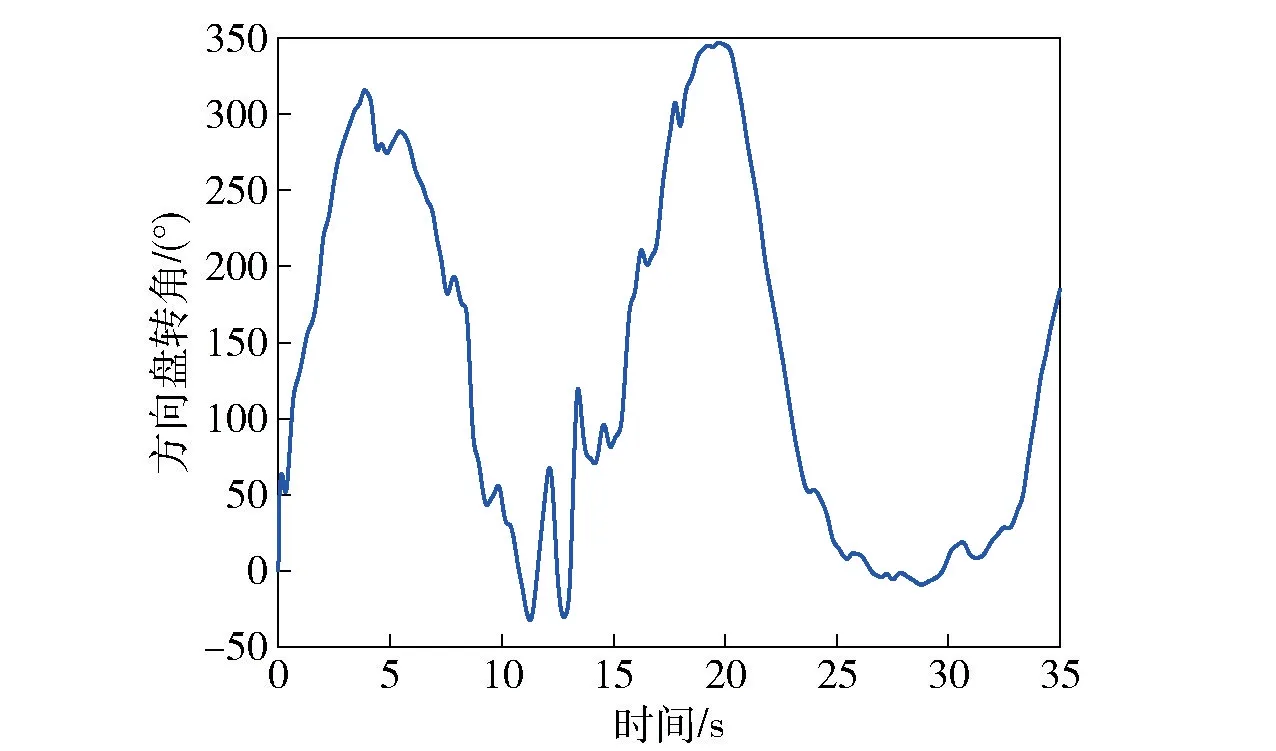
图7 实验方向盘转角Fig.7 The experimental steering wheel angle
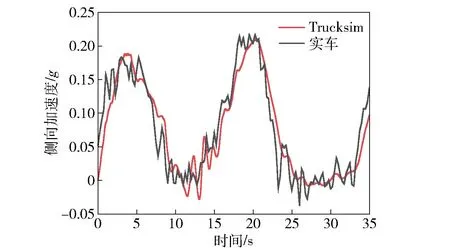
图8 侧向加速度验证Fig.8 Lateral acceleration verification
对图8 和图9 的对比结果做进一步分析。实验测试数据与Trucksim 模型输出数据误差对比结果如表3 所示,侧向加速度均方根误差为0.002 3,最大误差为0.073 5 g。横摆角速度的均方根误差为0.035 9,最大误差为0.360 6 °/s。由此可见,仿真数据与实验数据基本一致,验证了Trucksim 中搭建的仿真模型在反映车辆横向动力学特征时具有较好的保真度,仿真模型的主要物理参数如表4 所示。
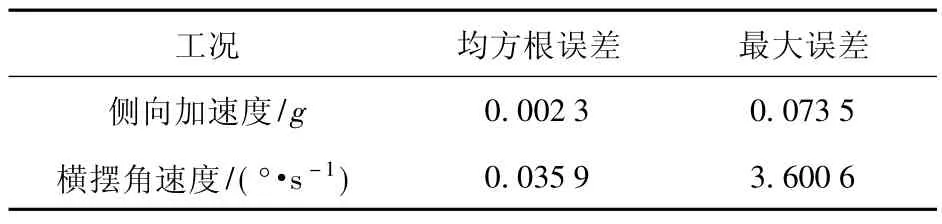
表3 Trucksim 模型误差Table 3 Trucksim model error
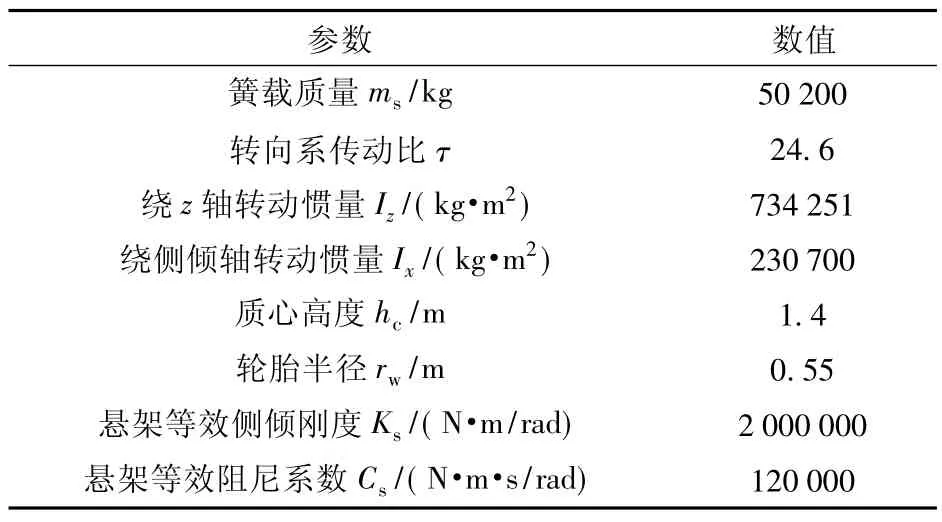
表4 Trucksim 仿真车辆参数Table 4 Trucksim simulated vehicle parameters
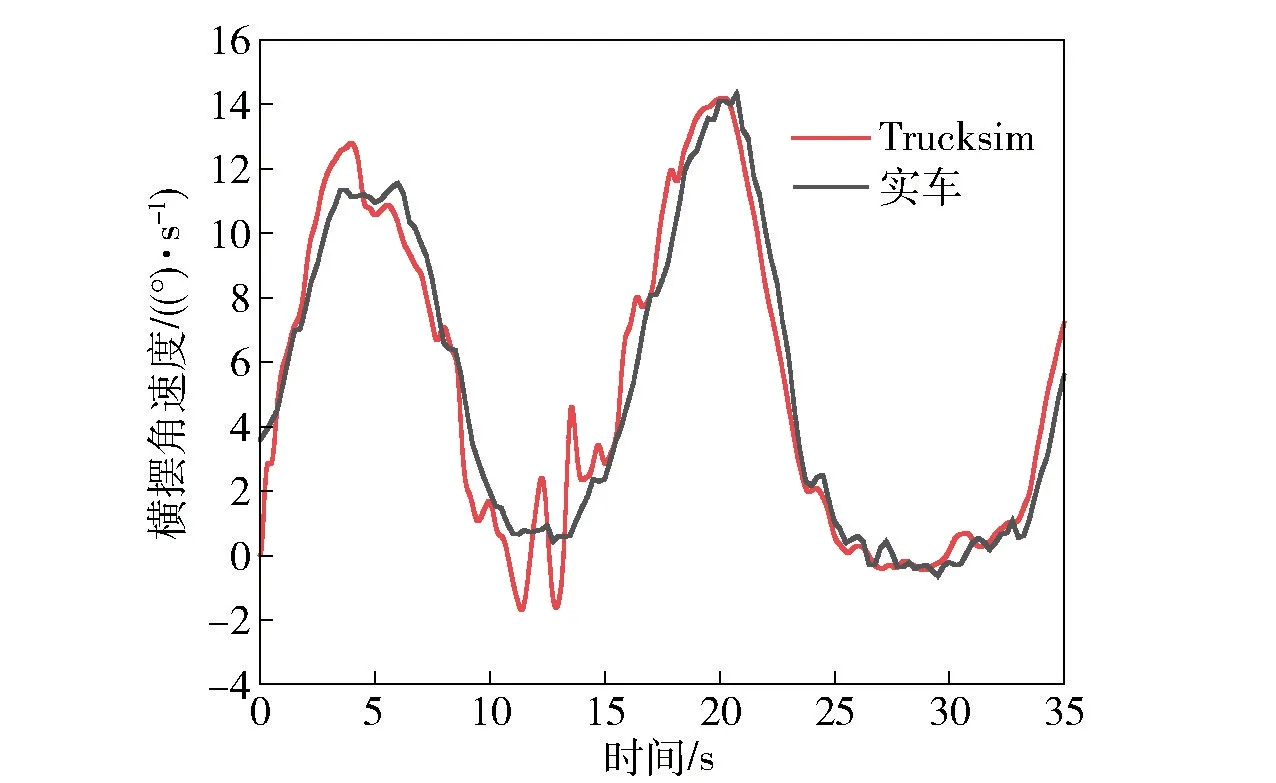
图9 横摆角速度验证Fig.9 Yaw rate verification
3.2 训练工况
训练集被用于离线训练网络模型,网络模型的泛化能力和模型准确性与数据集密切相关。在制作数据集时,设置了一段随机的行驶路线,如图10 所示。车辆初始位置为图10 中黑色原点位置,沿曲线伸展方向前进,车辆纵向速度在30~40 km/h 间变化,纵向速度曲线如图11 所示。将数据集拆分为两部分,其中蓝色路径用于制作训练集,红色部分用于制作测试集。数据信息包含车辆纵向速度、方向盘转角、横摆角速度以及车辆横向速度,采样频率设置为100 Hz。
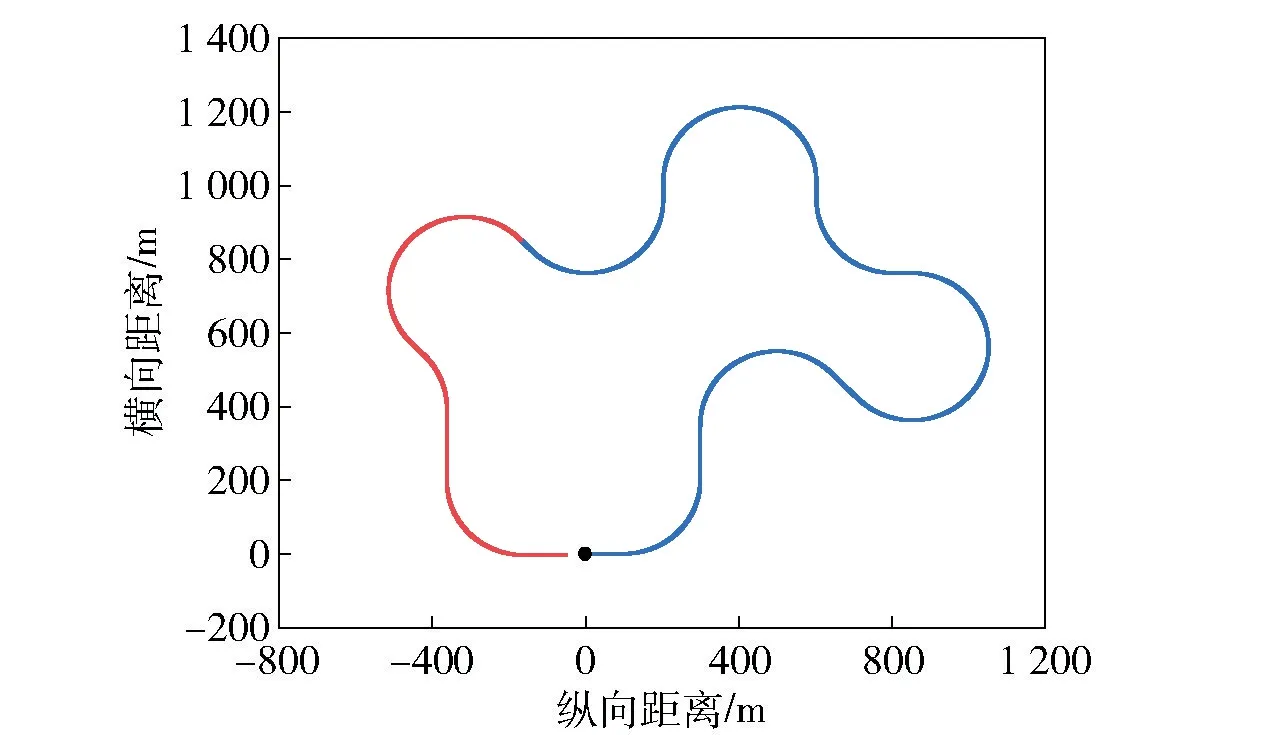
图10 数据集行驶路线Fig.10 Driving path in dataset
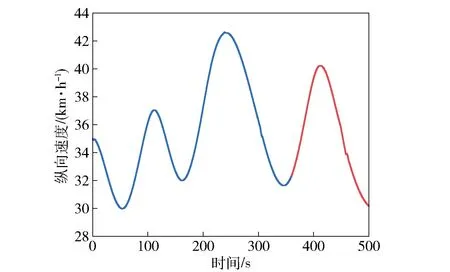
图11 数据集行驶速度Fig.11 Longitudinal velocity in Dataset
4 闭环网络模型训练
4.1 数据归一化
在深度学习中对训练数据进行归一化处理,可以提高训练的收敛速度和模型精度,使网络在训练过程中避免梯度爆炸,同时有利于确保每个输入信息对于网络最终输出结果的影响是相等的[19]。常用的归一化方法有Max-Min 归一化等。为减少训练集与测试集中最大值、最小值差异带来的影响,在对数据预处理时采用Standard 归一化。针对网络的每一类输入数据,分别计算其训练集中的样本均值μ和样本标准差S,再依据式(12) 进行转换。由于网络在训练过程中对数据进行了归一化处理,在与仿真数据对比时,网络输出的数据需要再经过式(13)进行逆归一化,以映射出实际的状态信息。
4.2 损失函数设置
损失函数是度量网络模型泛化能力的标准。为避免网络模型在训练过程中出现过拟合导致模型泛化能力降低的现象,在损失函数中增加网络权重正则化函数是一种常用的避免过拟合技术。在训练网络时,采用均方误差作为度量网络输出与实际标签之间差异的损失函数,并添加L2 正则化函数以限制权重保持在小数值范围,通过调节超参数λ 的大小可以改变正则化项对网络的影响,使得网络具有更好的泛化能力[20],整个网络的损失函数如式(14)所示:
式中:J 表示网络损失函数;m 为单次输入网络中的样本数据个数;为网络模型的输出;Y为网络输出的标签值;λ 为正则化项的惩罚系数为0.001;W 表示网络权重。
4.3 基于RMSprop 的动态学习率更新策略
在网络反向传播过程,采用RMSprop 自适应优化器用于计算更新模型参数,参数更新流程如图12[21]所示。首先初对参数进行初始化,如全局学习率ε、衰减率ρ 和小常数ξ,其中小常数ξ 的作用是在计算Δθn时,避免累计平方梯度为0 导致参数更新过程发散。RMSprop 作为一种自适应优化器,在计算梯度时采用超参数衰减率ρ 以弱化累计梯度的影响,使得参数更新过程时不因为循环次数的增大而减小,通过设置合理的超参数ρ 可以避免网络训练过程中出现梯度消失的情况。
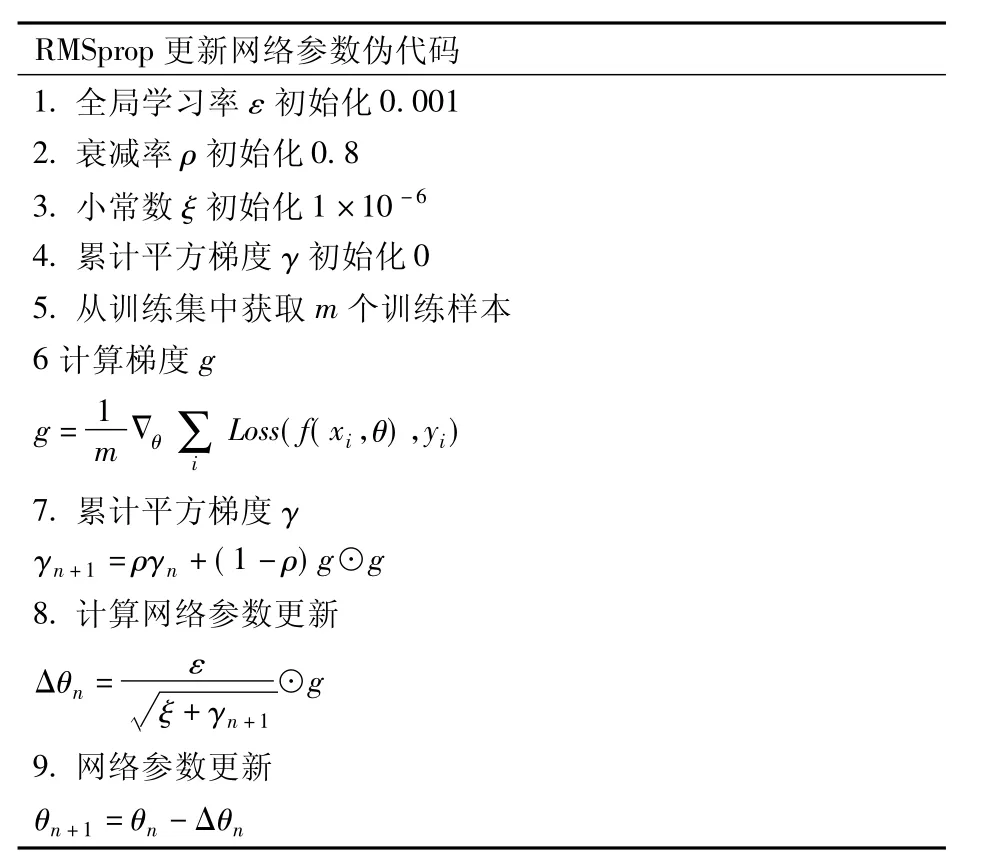
图12 RMSprop 优化器更新策略Fig.12 RMSprop optimizer update strategy
随着训练循环次数的增加,不断缩减全局学习率可以使得网络达到更好的训练效果。因此在RMSprop 的基础上,对于全局学习率采用动态调整的策略,网络每训练100 个循环全局学习率缩减为原来0.6 倍,全局学习率动态更新的伪代码如图13 所示。
对照组患者采用传统的护理干预,主要为患者入院后,协助其进行常规检查,并对临床治疗方式进行讲解,同时对病情进行观察。研究组患者采用以人为本的护理理念进行干预,主要包括改善护理理念、打造人性化护理环境、加大临床服务意识、人性化心理干预等。
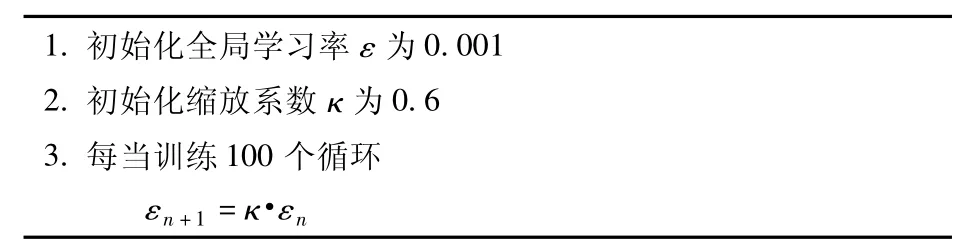
图13 全局学习率动态更新策略Fig.13 Dynamic update strategy of global learning rate
4.4 闭环训练
通常网络训练流程以及网络模型的结构呈开环结构,网络输入与输出无闭环连接,输入数据均来自于采集的样本数据。训练过程如图14 蓝色部分所示,此时网络模型呈开环结构。
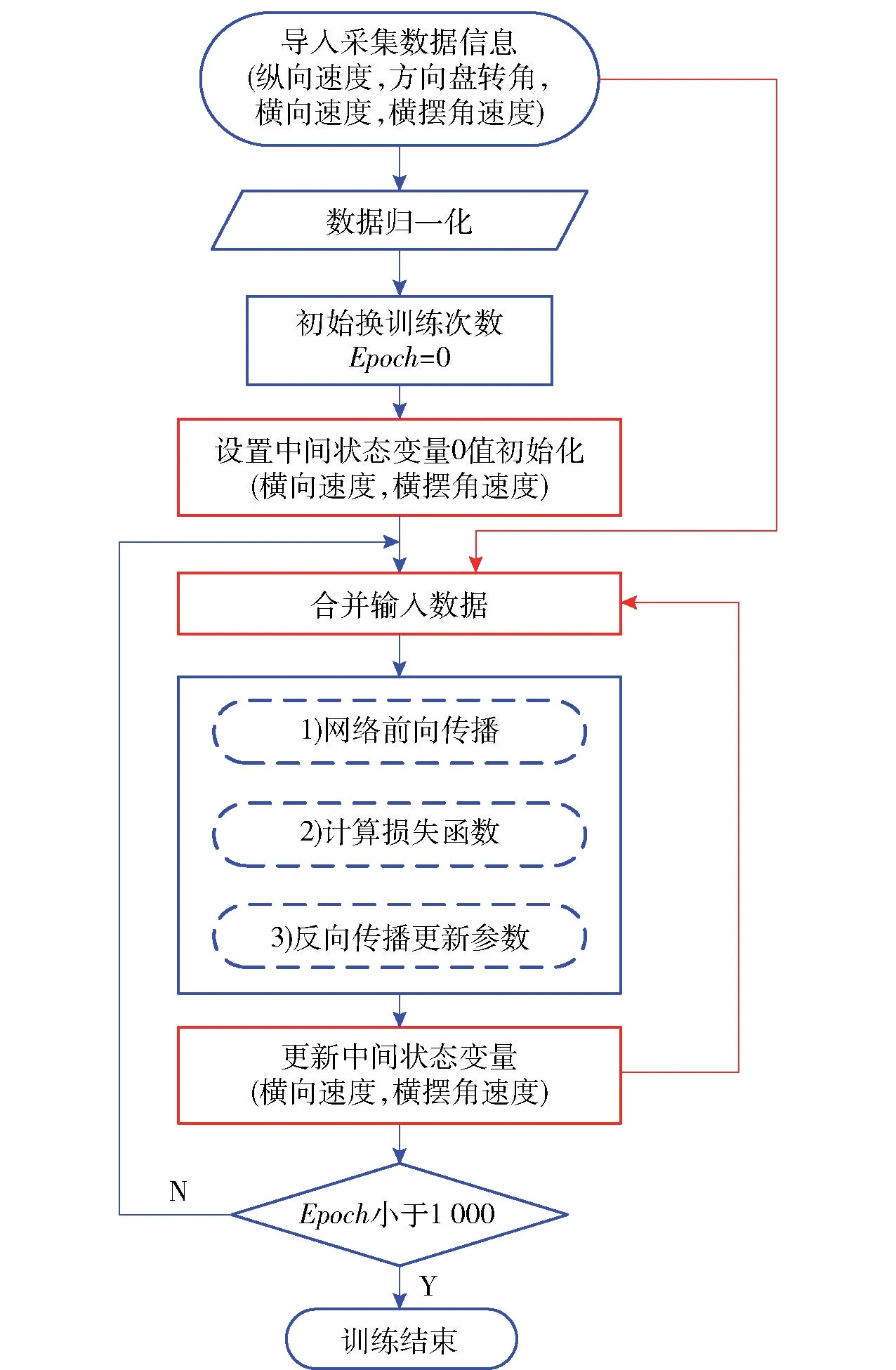
图14 闭环训练Fig.14 Training in closed structure
为减少数据建模过程中模型对于输入数据的需求,使数据模型能够像物理模型一样驱动,需要建立闭环结构的网络模型,以实现数据模型递归更新的能力。然而,如果仍然按照开环的方式训练模型参数,就必须破坏网络结构,使得网络呈开环条件下进行训练。
为构建适应于闭环网络的训练方法,在网络的输入过程中不再提供状态变量横向速度和横摆角速度的数据信息,而是在训练网络模型中引入中间状态进行替代。在网络迭代之前,对中间状态变量横向速度和横摆角速度进行0 值初始化,联合采集的纵向速度和方向盘转角信息一起输入至网络中,数据标签为采集的横摆角速度和横向速度。当开始训练时,再依次经过前向传播,损失函数计算和反向更新参数,同时将网络前向传播预测的状态信息用于更新中间状态变量,再联合数据集中的纵向速度和方向转角信息作为新的输入序列,用于下一时刻的预测。
4.5 训练收敛性对比
与文献[18]开环训练方法相对比,两组训练方法下损失函数数值变化趋势如图15 所示。在500 次循环训练后,两组方法均能使得网络收敛至平稳水平。在开环训练条件下,损失函数最终收敛至0.000 53。相比于闭环条件下,损失函数收敛至更低的水平。
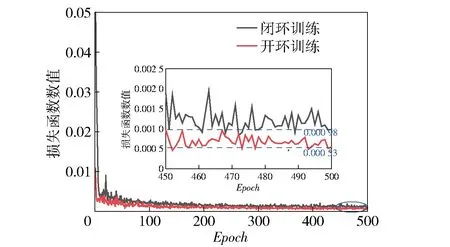
图15 损失函数变化对比Fig.15 Comparison of loss function changes
5 模型泛化性分析
在模型泛化性对比分析中,对比对象分别选择基于开环训练方法得到的闭环网络模型和无精确先验信息下的线性化横向模型,并以Trucksim 仿真数据作为标准参考值。
横向速度的预测结果如图16 所示,3 组模型预测结果的变化趋势基本一致。通过输出预测结果的绝对值误差曲线,线性化横向模型的误差曲线显著高于网络模型,结果如图17 所示。为进一步分析模型之间的相对误差,对横向速度的绝对值误差曲线进行统计分析,分别计算标准差、最大值和平均值3 个统计量,结果如表5 所示,不同模型之间的相对误差如图18 所示。在3 组横向速度的误差统计分析中,线性化物理模型的误差最大,误差统计结果分别为0.035、0.233 km/h 和0.061 km/h。对比图18中的统计量的变化趋势,结果证明模型误差按照线性化横向模型、开环训练模型和闭环训练模型的顺序递减。其中,闭环训练模型误差的最大值为0.079 km/h,平均值为0.006 km/h,标准差为0.007,相比于开环训练结果降低了58.40%、64.71%和41.67%。闭环训练结果显著提高了横向速度预测的精度。
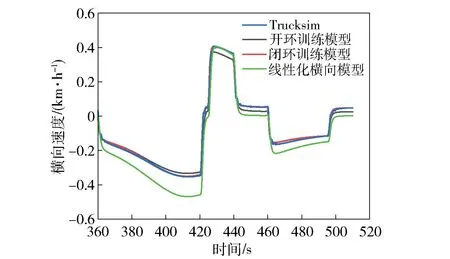
图16 横向速度预测结果对比Fig.16 Comparison of lateral velocity prediction results

图17 横向速度绝对值误差Fig.17 Absolute value error of lateral velocity
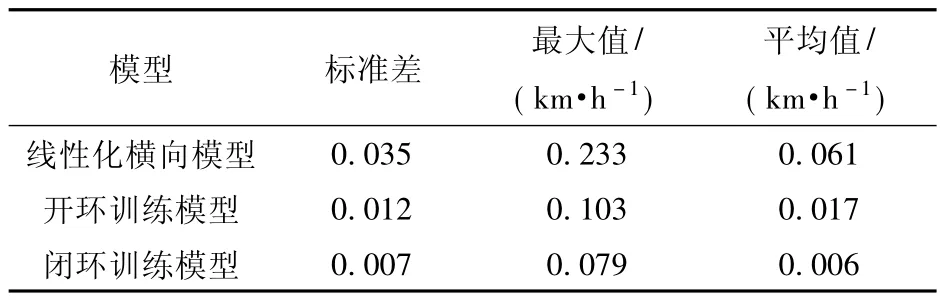
表5 横向速度误差统计分析Table 5 Statistical analysis of lateral velocity
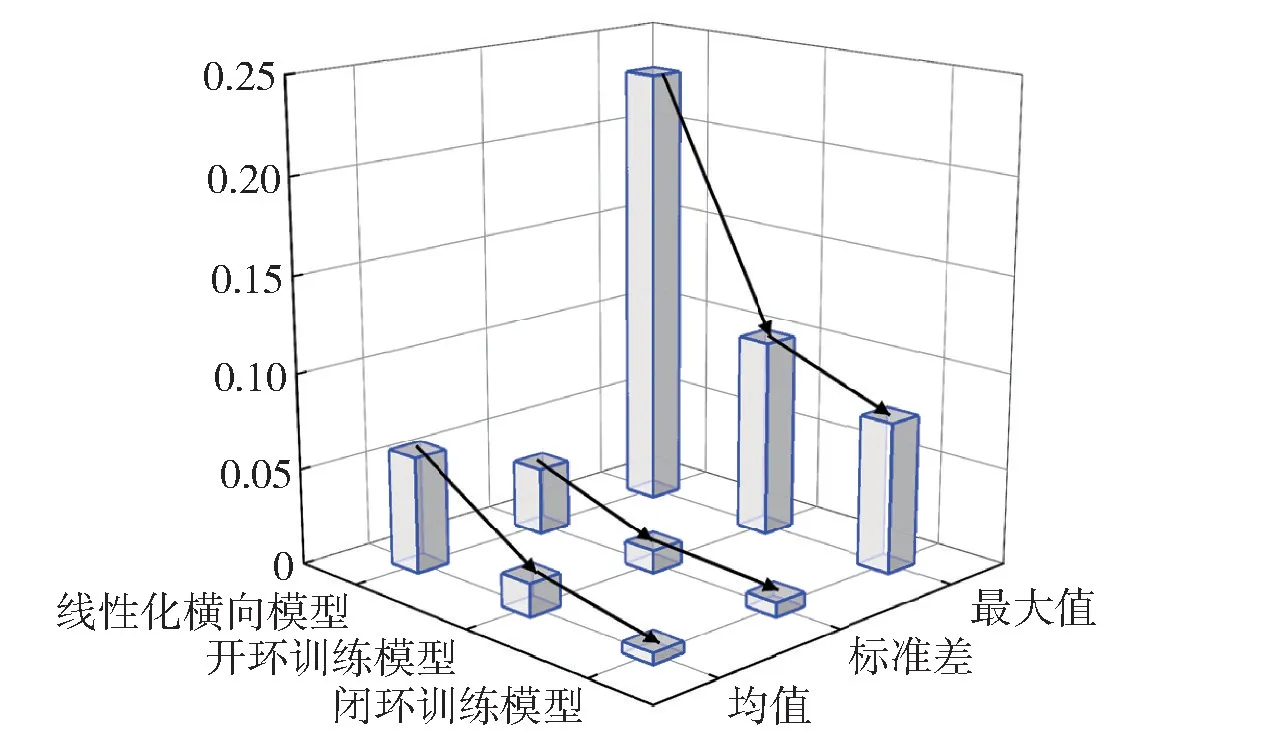
图18 横向速度相对误差分析Fig.18 Relative error analysis of lateral velocity
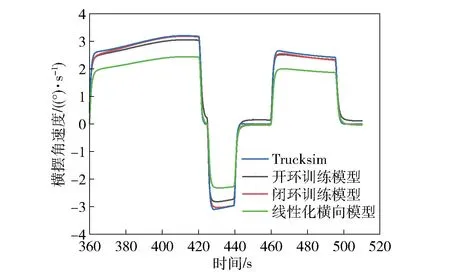
图19 横摆角速度预测结果对比Fig.19 Comparison of lateral velocity prediction results
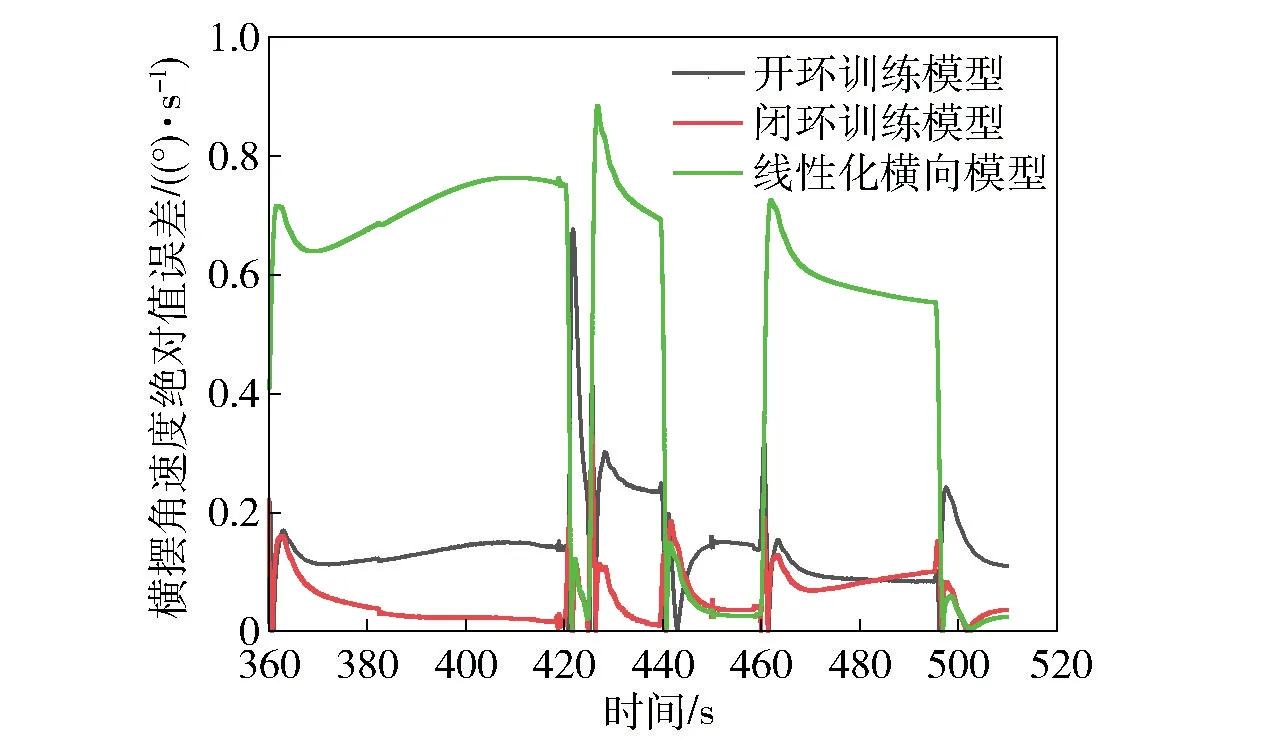
图20 横摆角速度绝对值误差Fig.20 Absolute value error of lateral velocity
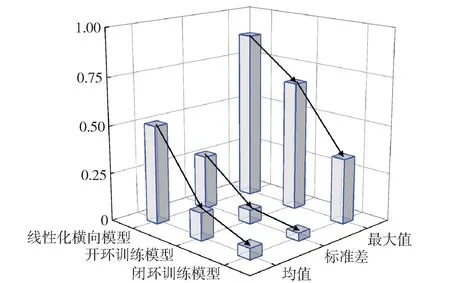
图21 横摆角速度误差对比分析图Fig.21 Relative error analysis of yaw rate
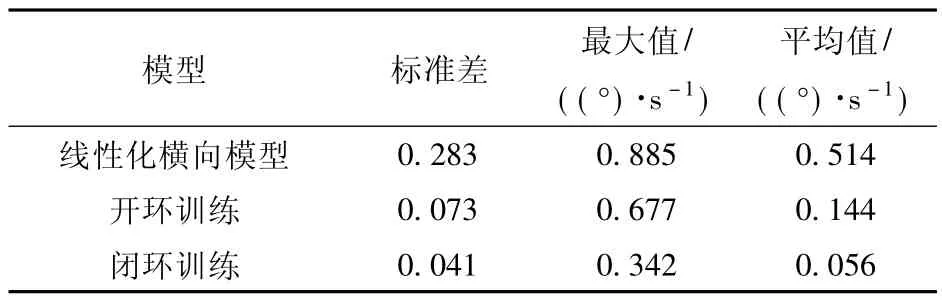
表6 横摆角速度误差统计分析Table 6 Statistical analysis of yaw rate error
通过对测试集中横向速度和横摆角速度的预测误差进行分析可知:相对数据建模,线性化横向模型保真度较低;对于闭环网络模型,采用闭环训练能够使得网络具有更高的保真度。尽管在网络训练阶段,文献[18]中的开环训练方法能够使得损失函数降至更低的水平,这是因为网络在训练过程呈开环的结构,网络的输入全部来自于采集的数据,输入信息贴近系统真实状态。然而,在测试阶段为实现网络递归更新的能力,直接将网络输出数据用于下一时刻的输入。由于模型结构发生了变化,网络输入数据的来源与训练阶段不一致。当预测的结果与实际状态不一致时,再联合采集的数据输入至网络就等同于向网络输入了错误的数据,因此使得模型保真度降低。
闭环训练方法,通过引入中间状态变量,使得网络在训练时仍然呈闭环结构,网络能够在仅输入纵向速度和方向盘转角的条件下进行训练。保证了闭环网络模型在训练阶段和测试阶段模型结构与输入数据来源的一致性。因此,闭环训练能够使得闭环网络具有更好的保真度。
6 结论
本文在无先验物理参数信息和车辆动力学函数关系条件下,针对某型五轴特种车辆的横向动力学行为特性,基于数据建模的方法搭建了闭环结构的网络模型以表征车辆横向动力学,并设计了一种闭环的训练方法。通过对比分析得出以下主要结论:
1) 在无精确物理参数信息和动力学函数关系条件下,简化的物理模型难以准确预测车辆的运动状态,数据模型具有更好的保真度。在物理模型递归特性的启发下,搭建的闭环网络模型减少了输入数据的需求,网络输入数据仅需纵向速度和方向盘转角即可预测车辆横向动力学运动状态,网络模型可以像物理模型一样驱动。
2) 在训练闭环结构的网络模型时,设计了一种闭环的训练方法。网络在训练过程中不断迭代更新中间状态变量,使得模型在训练过程时,网络的输入信息仅包含纵向速度和方向盘转角,模型始终保持闭环的结构。相比于开环训练的方法,闭环训练有效提高了网络模型的精度。在相同的网络模块下,横向速度和横摆角速度的预测误差最大值降低了58.40% 和49.48%,平均值降低了64.71%和61.11%,标准差降低了41.67%和43.83%。
3) 相比物理建模,闭环网络模型无需额外的输入数据,模型只需利用车辆状态信息即可训练出高保真度的动力学模型。因此,闭环结构模型可以较好地应用在自动驾驶车辆模拟测试、轨迹规划和控制领域。
附录
A 离散化横向动力学模型
五轴特种车辆的离散横向动力学模型如式(A-1) 至式(A-5) 所示:
式中:vy(k) 和γ(k) 为k 时刻动力模型预测的横向速度和横摆角速度;vx(k) 为k 时刻采集的车辆纵向速度;δ(k) 为k 时刻控制信号方向盘转角;Ci,lat表示第i 轴轮胎的侧偏刚度;Li表示第i 轴到质心的距离;m 表示整车质量;Iz表示转动惯量;η 表示方向盘转角与一轴轮胎转向角的传动比;T 表示离散时间间隔。模型参数如表A-1 所示。