全电坦克双向稳定系统自适应积分鲁棒控制
2023-02-27袁树森邓文翔姚建勇杨国来
袁树森,邓文翔,姚建勇,杨国来
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引言
新一代坦克武器正朝着高机动、高精度方向发展,对坦克双向稳定系统提出了更高的要求[1]。传统的电液式坦克双向稳定系统效率低、噪声大、维修困难等缺点逐渐凸显,全电式坦克双向稳定系统不但克服了上述缺点,还进一步降低了维护成本,是目前坦克双向稳定系统发展的主要方向[2]。随着军事技术变革,未来战场环境恶化,作战理念调整,高机动条件下坦克双向稳定系统的非线性机理、机电耦合机理、系统不确定性机理变的更加复杂,已成为世界各国学者关注的重点[3]。
坦克双向稳定系统的精确指向控制面临以下两大主要挑战。第一: 高机动环境下系统的非线性机理复杂、形式多样,主要包括方位和高低子系统的两轴耦合特性、系统内部的摩擦非线性、间隙非线性以及由于外界干扰和测量误差导致的各种不确定性[4-5],因此需要准确建立考虑系统非线性、耦合性和不确定性的机电一体化综合动力学模型。文献[6 -8]建立了坦克高低子系统的动力学模型,未考虑系统的两轴耦合动态特性;文献[9 -12]考虑了坦克双向稳定系统的执行机构建模及其控制器的设计,但只是将高低或方位向的负载折算至电机转子的总转动惯量,实质是控制驱动坦克炮塔和火炮的伺服电机;文献[4,13 -16]考虑了坦克双向稳定系统方位向与高低向的两轴耦合动力学特性,基于拉格朗日动力学方程建立了双向稳定系统两轴耦合动力学模型,忽略了执行机构伺服电机与动力学模型之间的机电耦合效应,控制器设计的本质是基于系统的力矩控制。
第二,现代战争的特殊作战环境,坦克武器所受的各种扰动逐渐增强,采用传统的控制方法难以适应未来高机动作战要求,随着影响坦克炮塔/火炮扰动幅度与频率的增大使得系统的性能急剧恶化甚至失稳[1]。目前坦克双向稳定系统最常用的还是比例-积分-微分(PID) 控制器[17],随着现代控制技术的提高,产生了一系列修正的PID 控制方法[18-19],但是PID 控制器本身依然是一种线性控制方法,在面对坦克双向稳定系统这样一个复杂的、多变量的非线性系统时,终究显得无能为力。为提高坦克双向稳定系统的跟踪性能,各种非线性控制算法并加以整合被逐渐应用至坦克双向稳定系统控制中。文献[7,20 -21]通过自适应控制处理了坦克炮控系统中的参数不确定性问题,但是即使很小的干扰都有可能使得参数自适应过程不稳定,进而降低控制器性能;文献[4 -6,22]针对坦克稳定系统提出了自适应鲁棒控制,可同时处理系统中的参数不确定性和不确定非线性,研究表明自适应鲁棒控制器不仅克服了传统自适应控制不稳定、鲁棒性差的缺陷,还提高了系统的控制精度,但是它过于依赖系统的精确化建模,系统内部潜在的未建模干扰会严重恶化自适应鲁棒控制器的跟踪性能。文献[15]将自适应鲁棒控制与线性扩张状态观测器有机地结合应用于坦克双向稳定系统,理论证明和仿真试验表明该方法具有良好的跟踪性能。然而以上控制器的设计在面对坦克双向稳定系统这样一个的复杂的不确定性系统时,只能获得一致有界的跟踪性能,这种性质对于双向稳定系统这样一个高精度系统而言是不能被接受的。作为坦克火控系统末端最重要的子系统,若不能保证首发命中,极有可能造成不可逆的后果,因此,获得渐进输出的跟踪性能在坦克双向稳定系统中显得尤其重要。为进一步获得优异的渐进跟踪性能,文献[16]首次将基于误差符号的积分鲁棒(RISE) 控制方法应用至坦克火控系统领域,虽然它忽略了系统执行机构的建模,但是数值仿真结果已表明了该方法的优越性。此外,基于RISE 的控制方法也已经在其他多类复杂非线性系统中得到成功应用[23-26]。
基于以上分析,本文针对全电坦克双向稳定系统中的强非线性、强耦合性、强参数时变性。第一步充分考虑炮塔-火炮的两轴耦合运动学特性和驱动端电机伺服系统内部的电气动态,建立了更符合实际的全电坦克双向稳定系统机电耦合解析动力学模型;第二步提出一种自适应积分鲁棒(AIR) 控制方法,通过Backstepping 法融合了积分鲁棒控制和自适应控制,无需预先知道坦克双向稳定系统外部干扰导数的上界,并且积分鲁棒增益可自动在线调节;第三步基于李雅普诺夫函数证明了闭环系统渐近稳定特性,所设计的控制器具有连续控制、不受干扰的自动增益整定和渐近跟踪等优点;第四步基于Recurdyn-Simulink软件进行联合仿真试验,大量对比结果验证本文所提控制策略的有效性。
1 坦克双向稳定系统动力学模型
1.1 坦克双向稳定系统两轴耦合动力学解析建模
坦克双向稳定系统的动力学模型如图1 所示,它主要包括方位子系统和高低子系统。图1 中: ma和mh分别为方位子系统炮塔和高低子系统火炮的质量;qa和qh分别为方位子系统和高低子系统在大地坐标系下的旋转角度,即炮塔和火炮的旋转角;La和Lh分别为炮塔和火炮绕其回转轴的半径。根据火控系统的目标指令,方位子系统用于稳定和驱动炮塔运动,高低子系统用于稳定和驱动火炮瞄准。
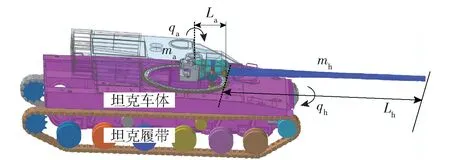
图1 坦克双向稳定系统两轴耦合系统结构Fig.1 Biaxial coupling system structure of the tank bidirectional stability system
选取方位子系统炮塔平面为零势能面,则炮塔的势能Pa=0,火炮的势能Ph=(mhgLhsinqh)/2;计算方位子系统炮塔和高低子系统火炮的动能:
根据Spong 等[27]的研究,拉格朗日函数为K=Ea+Eh-Pa-Ph,定义Ta和Th分别为方位子系统炮塔和高低子系统火炮的驱动力矩,根据Euler-Lagrange 动力学方程:
将Ea、Eh、Pa和Ph代入式(3),则坦克双向稳定系统两轴耦合动力学解析模型为
式中:da(t) 和dh(t) 分别为方位子系统和高低子系统的外干扰等不确定性项;g 为万有引力常数。
1.2 方位子系统驱动端动力学解析建模
全电坦克双向稳定系统方位子系统采用电力传动方式,它包括伺服电机、座圈系统等。方位子系统的运动过程简述为伺服电机输入电压产生电枢电流,电枢电流通过与电枢电路中的励磁通相互作用而产生电磁转矩,电磁转矩克服炮塔负载,最终伺服电机和齿轮机构随炮塔水平方向同步转动。方位子系统伺服电机和齿轮机构的传动原理与安装结构如图2 所示。

图2 方位子系统驱动端结构Fig.2 Drive-end structure of the azimuth subsystem
考虑伺服电机的实际特性,由于电枢电感较小,忽略电枢电流动态,因此方位子系统伺服电机的动力学方程[28]可描述为
式中:Js为伺服电机的转动惯量;θs为伺服电机的转角;Ts为伺服电机电磁转矩;Bs为伺服电机轴黏性阻尼系数;Ts,i为齿轮输入转矩;Ks为伺服电机力矩放大系数;us为伺服电机的控制输入;Ks,e为伺服电机的电动势系数。
由于方位子系统需要采用由多级齿轮机构组成的机械减速传动装置降速,以满足炮塔/火炮所需,齿轮啮合传动不可避免地存在齿隙非线性,通过如下连续齿隙模型描述多级齿轮机构输入转矩Tg1和输出转矩Ta(它是方位子系统的输入转矩,即式(4)) 之间的齿隙非线性
式中:Ns为多级齿轮机构的传动比;fs(t) 为多级齿轮机构传动过程的未建模误差。
因此,方位子系统的输入转矩可表示为
将Ta代入式(4) 可以得到全电坦克双向稳定系统方位子系统动力学模型为
位子系统动力学模型式(11) 综合考虑了炮塔-火炮机械系统的方位向动态特性和驱动端执行机构内部的伺服电机电气动态特性,充分反映了方位子系统机械、电气一体化耦合动力学特性、摩擦非线性、齿隙非线性以及其他未建模的不确定性。
1.3 高低子系统驱动端动力学解析建模
全电坦克双向稳定系统高低子系统采用电动缸传动,其结构形式如图3 所示,它包括滚珠丝杠、伺服电机等。其运动过程简述为电动缸系统输入电压产生电枢电流,电枢电流产生电磁力使得滚珠丝杠旋转,进而带动电动缸推杆做直线运动,推杆克服高低子系统负载,驱动火炮身管在高低向的旋转。电动缸的安装位置原理和传动原理分别如图4 和图5所示,高低子系统的动力学解析建模与方位子系统相似,不同之处在于高低子系统执行机构采用电动缸驱动,将推杆的直线运动转换为身管的旋转运动,还需额外地考虑机构非线性特性。
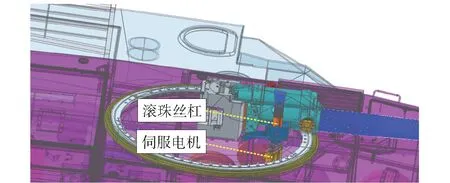
图3 高低子系统驱动端结构Fig.3 Drive-end structure of the high-low subsystem
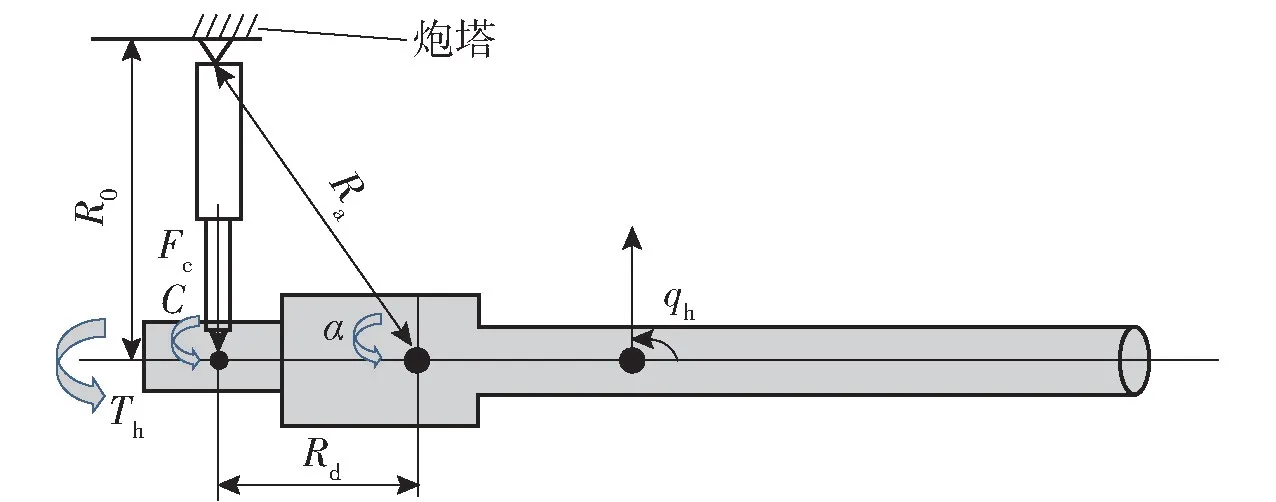
图4 电动缸安装结构原理图Fig.4 Electric cylinder installation structure

图5 电动缸传动原理图Fig.5 Electric cylinder driving mechanism
电动缸的动力学模型[29]可以描述为
式中:Tc为伺服电机电磁转矩;Tc,s为伺服电机输出转矩;Jc为伺服电机转动惯量;θc为伺服电机的转角;Bc伺服电机轴黏性阻尼系数;Kc为伺服电机力矩放大系数;uc为伺服电机的控制输入;Tc,o为电动缸的输出转矩;Jc,d为驱动器的转动惯量;Bc,d为驱动器的黏性阻尼系数。
电动缸的输出转矩可描述为
式中:Lc为丝杠的导程;Fc为电动缸推杆的输出推力;η 为电动缸的传动效率;Nc为电动缸的传动比;ΔR 为电动缸推杆的输出位移。
如图4 所示,清晰描述了电动缸的上下支点和身管以及摇架之间的几何关系与位置关系,Ra为电动缸在炮塔内的支点铰接中心与耳轴中心之间的距离,R0为电动缸的初始长度,Rd为电动缸的下支点中心与耳轴中心之间的距离,α 为电动缸的顶角角度,α0为电动缸的初始角度。其中α=qh+α0,则电动缸推杆的位移ΔR 可表示为
由式(12)、式(13)、式(14) 可得
通过图4 的几何关系分析可知,电动缸对高低子系统的输入转矩为
式中:角度C 为电动缸推力与坦克身管水平轴线之间的夹角,根据图4 中的三角函数关系可得
因此,根据式(15) 和式(19) 可得高低子系统的输入转矩为
式中:fc(t) 表示高低子系统驱动端的建模误差。将Th代入式(5) 可以得到全电坦克双向稳定系统高低子系统动力学模型为
高低子系统动力学模型式(23) 综合考虑了炮塔-火炮机械系统的高低向动态特性、驱动端执行机构电动缸内部的伺服电机电气动态和转子的动力学特性以及电动缸和高低子系统之间的机构非线性,充分反映了高低子系统机械、电气一体化的耦合动力学特性、摩擦非线性、齿隙非线性、机构非线性以及其他未建模的不确定性。
2 AIR 控制器设计
为了便于控制器的设计,合理假设如下:
假设1系统的总干扰Δ(t) 足够光滑,使得均存在且有界,即
式中:δ1和δ2均为未知正数。
假设1 中对于未建模总干扰足够平滑的假设在坦克武器系统实际工程中是合理的,因为实际系统中的物理执行器不可能产生不连续的力或者力矩。
控制器的设计通过Backstepping 法将积分鲁棒控制和自适应控制相结合。控制器的设计目标为:给定坦克双向稳定系统位置参考信号x1d=[x1ad(t),x1hd(t)]T,设计一个有界的连续控制输入u=[uw1,uw2]T,使得系统输出x1=[x1a,x1h]T跟踪参考位置信号的误差趋于零或在期望的范围内。
首先,定义误差变量:
式中:z1为坦克双向稳定系统的跟踪误差。对z1求时间的导数,可得
下一步,通过定义z2≜x2-x2,e表示它们之间的偏差,x2,e是状态x2的虚拟控制律,x2,e=[x2,e1,x2,e2],设计为
式中:k1=diag(k11,k12) 为正反馈增益。进一步可得z1的导数为
此外为了处理行进间坦克双向稳定系统的未知扰动,定义一个辅助误差信号r(t),以获得一个额外的控制自由度,
式中:k2=diag(k21,k22) 为正反馈增益。需要指出的是,辅助误差信号r(t) 是不可测量的,因为根据式(30) 可以发现它的设计依赖于系统的加速度信号,引入它的意义只是为了辅助后续控制器的设计。
根据式(24) 和偏差z2的定义,r(t) 的展开式如下:
根据式(31),基于模型的控制器可设计为
式中:kr=diag(kra,krh) 是正反馈增益,kra、krh分别为方位子系统和高低子系统的正反馈增益;ua是坦克双稳系统基于模型的补偿项;us为鲁棒项;us1为镇定双稳系统名义模型的线性鲁棒项,us1=-(kr+M1(x1) k2) z2;us2为非线性鲁棒项以降低未建模扰动对双稳系统性能的影响。在坦克双向稳定系统的动力学解析建模式(4) 和式(5) 提前考虑了系统的两轴耦合特性,因而可以通过控制器的设计提前抵消一部分耦合特性的影响,提升系统的跟踪性能。将方位子系统和高低子系统的模型补偿项ua=[uaa,uah]T具体形式展开如下:
根据式(33) 和式(34) 可以发现,方位子系统的模型补偿项uaa和高低子系统的模型补偿项uah包含了双向稳定系统的耦合特性项,降低了耦合作用对系统跟踪性能的影响。
将式(32) 代入式(31) 得
根据式(35) 可以发现,控制器的设计需要克服不确定性Δ(t) 的干扰,根据AIR 控制器的设计方法,非线性积分鲁棒项的结构如下:
增益β 的自适应律设计为
式中:Γ 是正的自适应律增益。
由于式(38) 中的自适应律中含有不可测的信号r(t),因此自适应律可通过以下计算:
综上,本文设计的全电坦克双向稳定系统AIR控制策略结构图如图6 所示。
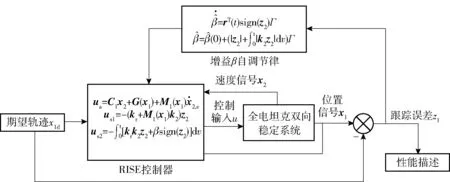
图6 全电坦克双向稳定系统AIR 控制策略结构图Fig.6 Schematic of the AIR control strategy for all-electric tank bidirectional stabilization system
传统的积分鲁棒控制通过固定的鲁棒增益β 以满足式(25) 中的δ1和δ2之间的不等式关系,即β≥以保证闭环系统的稳定性。其中k2min和k2max分别是矩阵k2=diag(k21,k22) 中的最小值和最大值。考虑δ1和δ2为未知上界,鲁棒增益通过式(38) 的自适应律自动调节,避免了传统鲁棒增益β 调节的随机性和保守性,还可以根据实际系统的工作情况进行自我调节,同时也避免了高增益反馈的问题。
3 稳定性分析
为便于验证AIR 控制器的性能,先给出如下引理。
引理1根据假设1,存在未知积分鲁棒增益β满足如下条件:
则定义以下函数P(t) 总是正定的,
式中:z2(0) 和分别是z2(t) 和的初始值。
定义如下辅助函数:
证明引理1 的证明类似于文献[30],将代入式(42),并对L(t) 求时间积分,可得
对式(43) 采用分步积分法,可得
根据式(45) 可知,若鲁棒增益β 满足不等式式(40),函数P(t) 始终正定,至此完成了引理1 的证明。
定理1如果选择反馈增益k1、k2和kr足够大,使式(46) 中定义的矩阵Λ 是正定的,则针对坦克双向稳定系统设计的AIR 控制器保证闭环系统中所有信号均是有界的,且使得系统获得全局渐进稳定的结果,即t→∞,z1→0。
式中:I=diag(1,1) ;0=diag(0,0) 。
证明定义如下李雅普诺夫函数:
对式(47) 求导并代入式(29)、式(30)、式(37)、式(38)、式(41)、式(42),可得
式中:λmin(Λ) 为正定矩阵Λ 的最小特征值。分析式(49) 可知,∀t >0,V(t) ≤V(0),因此V∈L∞范数,由此可知z1、z2、r(t),以及范数。
积分式(49),则有
分析式(50) 可知z1,z2,r(t) ∈L2范数,根据假设1 和式(29)、式(30)、式(37) 可知L2范数,因此W 是一致连续的,由Barbalat 引理可知t→∞时,W→0,即Z→0,则坦克双向稳定系统的跟踪误差z1→0,至此完成了定理1 的证明。
4 行进间坦克双向稳定系统多体动力学模型
行进间全电坦克双向稳定系统是一个具有复杂非线性和不确定性的机电一体化系统,通过基于Recurdyn 软件的虚拟样机技术不仅可以有效模拟真实坦克系统的非线性、不确定性以及行进间路面的振动特性,还易于实现多体动力学模型与控制系统之间的联合仿真。行进间全电坦克多体动力学模型如 图7 所示,建模过程中根据坦克的拓扑结构,考虑其主要构件火炮身管、摇架、炮尾、炮塔、车体等进行建模。
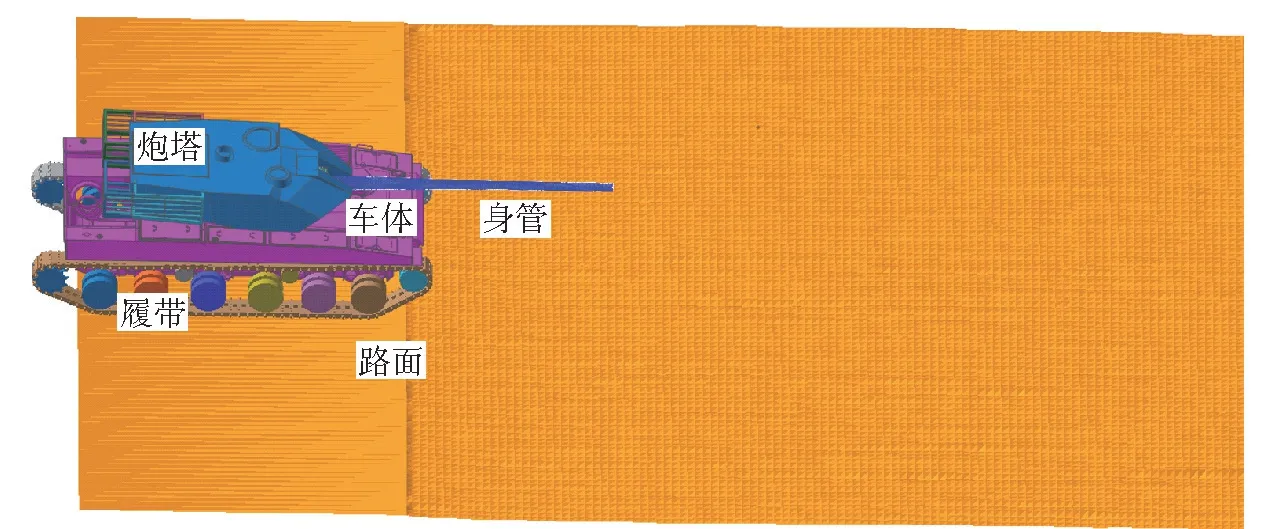
图7 行进间全电坦克多体动力学模型Fig.7 Allelectric tank multi-body dynamics model
此外,由于坦克行驶过程中路面激励是影响坦克双向稳定系统的主要因素,因此准确重构路面不平度是行进间坦克动力学模型的关键部分,也是验证控制策略有效性的基础。路面不平度表征了道路表面高度偏离理想基准平面的程度,其统计特性可以利用路面功率谱密度来描述:
式中:Gq(n0) 为路面不平度系数,表征了参考空间频率n0下的路面功率谱密度值;n 为空间频率;n0为参考空间频率;w 为频率指数。
为了模拟实际路面对坦克双向稳定系统的影响,结合坦克武器实际行驶条件,根据路面不平度计算方法中谐波叠加法的描述,坦克行进间路面粗糙度函数可以由一系列随机相位的正弦函数叠加而得,其可以表示为
此外,由于三维路面不平度函数的随机相位角不同,导致坦克行进间履带左右两侧所受的路面激励不同。进一步扩展可得,三维路面不平度函数可表示为
式中:A 为中心频率对应的谐波的振动幅值;y 为垂直于路面方向上的位移;αn为新生成的[0,1]上均匀分布的随机数。
根据式(53) 和式(54),基于MATLAB 软件编写三维路面不平度计算程序,重构长300 m,宽10 m的D 级路面模型,如图8 所示。利用节点缝合法生成Recurdyn 软件可以读取的路面文件并导入建立的坦克多体动力学模型中。
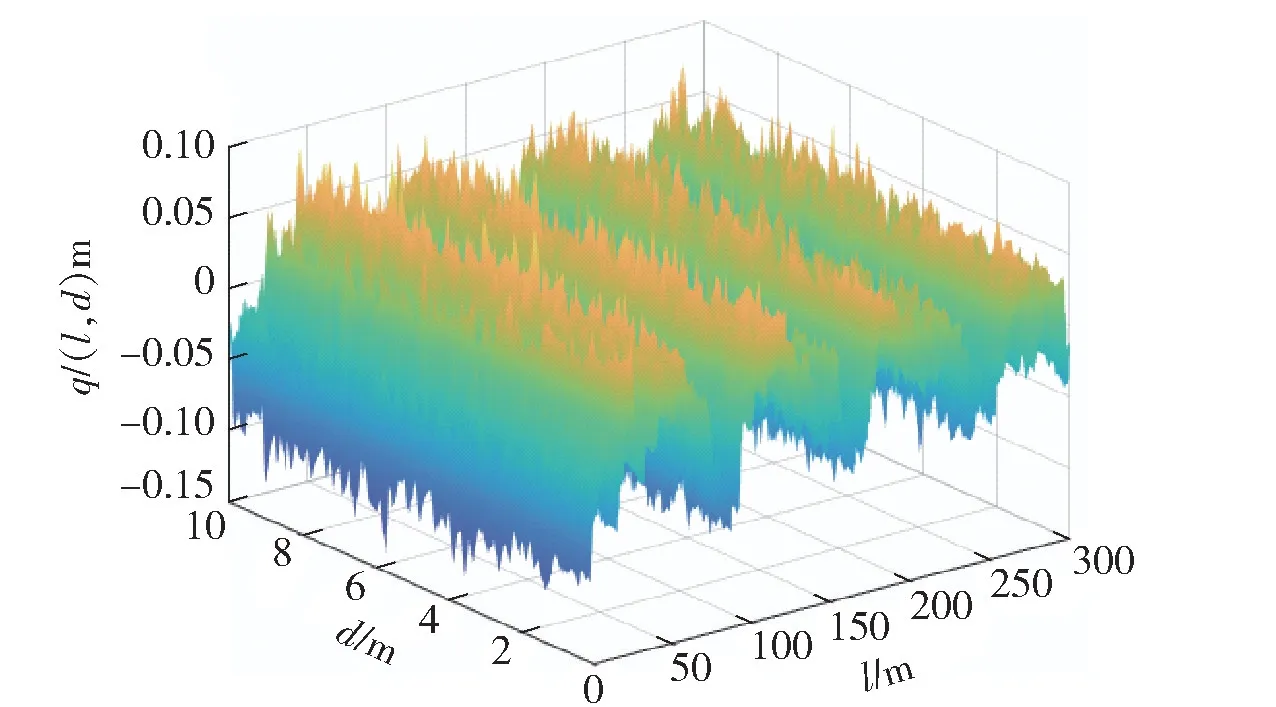
图8 D 级三维路面模型Fig.8 D-level three-dimensional road surface model
5 联合仿真分析
基于Recurdyn 软件建立图7 所示的行进间全电坦克多体动力学模型;基于Simulink 软件分别建立方位和高低子系统的驱动端伺服电机动态模型;基于MATLAB软件环境采用C 语言编写图6 设计的AIR 控制器。在MATLAB 软件环境中给定方位和高低子系统的期望运动轨迹,经过AIR 控制器传输至伺服电机动态模型,电机的输出转矩通过Simulink软件与Recurdyn 软件之间的数据交互接口加载至Recurdyn 软件中的电机输出齿轮上,最终将方位和高低子系统的实际运动轨迹反馈至控制系统中形成闭环控制,进行联合仿真分析。图9 为最终全电坦克双向稳定系统联合仿真的原理图。
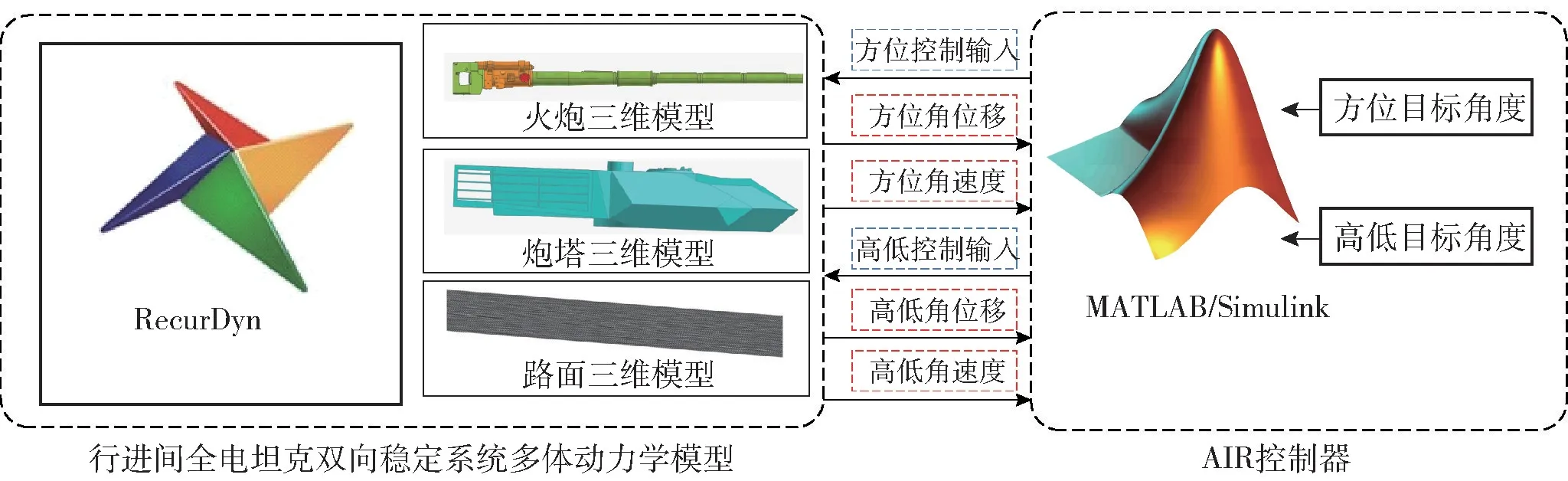
图9 全电坦克双向稳定系统联合仿真原理Fig.9 Co-simulation of the bidirectional stability system for all-electric tanks
全电坦克双向稳定系统参数选取如下:方位子系统炮塔质量ma=5 000 kg,炮塔旋转中心与火炮旋转中心之间的距离La=1.15 m,高低子系统火炮质量mh=1 950 kg,火炮旋转中心与炮口之间的距离Lh=4.88 m,万有引力常数g=9.8 m/s2;方位子系统驱动端Js=0.002 2 kg/m2,Bs=0.009 8 N·m·s/rad,Ns=16,Ks=1.95 N·m/V,Ks,e=25.782 5 V·m/A;高低子系统驱动端Jc=0.050 5 kg/m2,Jc,d=0.013 1 kg/m2,Bc=0.017 6 N·m·s/rad,Bc,d=0.006 6 N·m·s/rad,Kc=0.003 1 N·m/V,Nc=3,Lc=0.02 m,Ra=0.55 m,Rd=0.44 m,R0=0.33 m,α0=arcsin(0.65)。此外,本文选择D 级路面作为坦克的仿真路况,路面激励的相关参数为n0=0.1 m-1,w=2,Gq(n0)=1 024 ×10-6m3。
为验证本文设计的AIR 控制器的有效性,联合仿真试验选取以下4 种控制算法进行对比:
1) 本文提出的AIR 控制器。坦克双向稳定系统的控制器参数选取如下,对于方位子系统k11=110,k21=15,kra=1;对于高低子系统k12=150,k22=10,krh=0.8。积分鲁棒增益β 的自适应增益为Γ=0.1,估计的初值β^(0)=0。
2) 传统的RISE 控制器。它是传统的积分鲁棒控制。为了确保对比的公平公正,它的控制器参数与AIR 控制器相同,但它没有自适应增益Γ,可以进一步验证本文自适应律的有效性。
3) 工程中广泛应用的PID 控制器。对于方位子系统kpa=15 500,kia=300,kda=100;对于高低子系统kph=1 900,kih=200,kdh=50。
4) 本文提出的AIR 控制器忽略模型补偿项ua中系统耦合特性项的(AIR-ua) 控制器,可以验证考虑耦合特性对控制性能的影响。为了确保对比的公平,其控制器参数的设计与AIR控制器相同。
为了评价以上4 种控制器对行进间全电坦克双向稳定系统的优越性,利用文献[31]中的3 个性能指标:跟踪误差的最大值Me、平均值μ 和标准差σ来评价每个控制算法的质量。
根据给定的期望跟踪指令的不同形式将联合仿真试验分为如下3 种工况:
工况1:方位子系统和高低子系统给定的期望跟踪指令分别为x11d(t)=0.4arctan(1-e-t3),x12d(t)=0.2arctan(1 -e-t3),坦克行进间的环境为20 km/h 的D 级路面,仿真采样周期为0.5 ms。这种期望跟踪指令可以考察所提控制策略对坦克双向稳定系统的静态跟踪性能,考察炮塔/火炮的定位和稳定精度。
图10 为AIR 控制器作用下,双向稳定系统的实际角度对期望角度指令的跟踪过程。方位子系统在4 种控制器作用下的跟踪误差如图11(a) 所示,图11(b) 给出了后5 s 时间内(即稳定状态下) 4 种控制器的对比跟踪误差,表1 为后5 s 时间内4 种控制器的性能指标。分析以上结果表明,对于方位子系统本文提出的自适应积分鲁棒控制器相比于其他3 种控制器获得更好的跟踪性能,虽然传统的RISE控制器也能获得较好的控制效果,但相比于本文提出的AIR 控制策略在各项性能指标上均优于传统的积分鲁棒控制器,验证了本文增益自适应方法的有效性。由于本文提出的AIR 控制器和传统的RISE 控制器都是基于模型的控制器,可以利用方位子系统的部分信息进行前馈补偿,同时积分鲁棒项的强鲁棒性可以很好的抑制外界的干扰,因此它们的瞬态和稳态跟踪性能均比PID 控制器完美。AIR控制器的控制效果也是优于AIR-ua 控制器的,表明基于模型的耦合特性补偿是有效果的。表1 结果表明,稳定状态下本文提出的AIR 控制器的稳定精度为0.248 mrad,相对于传统的RISE 控制器、PID 控制器和AIR-ua 控制器分别提高了50.2%、90.1%和63.1%。高低子系统在4 种控制器作用下的跟踪误差和后5 s 时间内的对比跟踪误差分别如图12(a)和图12(b) 所示,表2 为后5 s 时间内4 种控制器的性能指标。可以发现,本文提出的AIR 控制器与其他3 种控制器相比仍获得了最好的瞬态和稳态性能,表现出优异的渐进跟踪效果,由表2 可知其稳定精度达到0.037 mrad,与传统的RISE 控制器、PID控制器和AIR-ua 控制器相比分别提高了33.9%、92.0%和51.9%,这样的稳定精度将大幅提高行进间坦克武器的首发命中率。
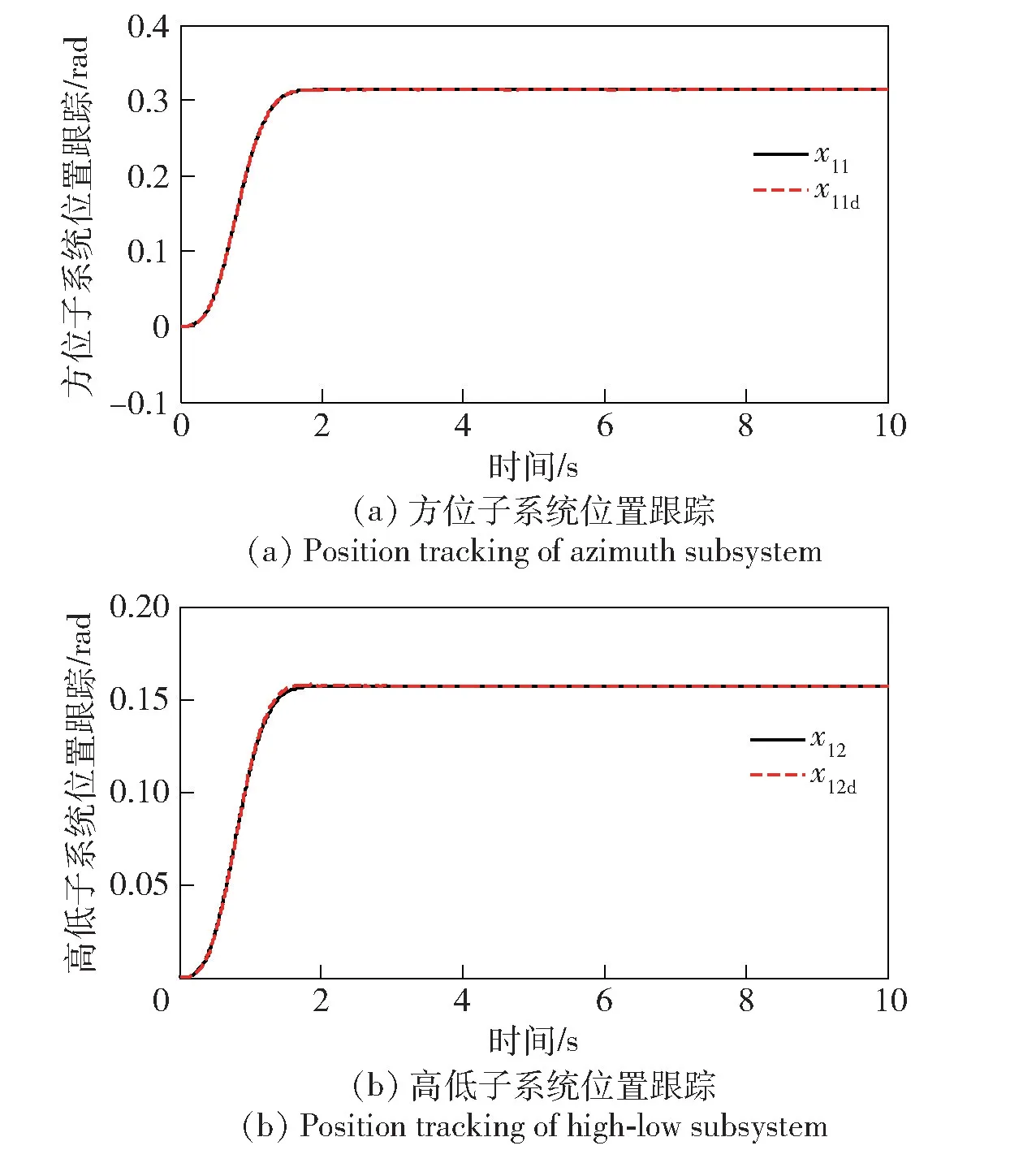
图10 工况1 坦克双向稳定系统位置跟踪Fig.10 Position tracking of tank bidirectional stabilization system in Case 1
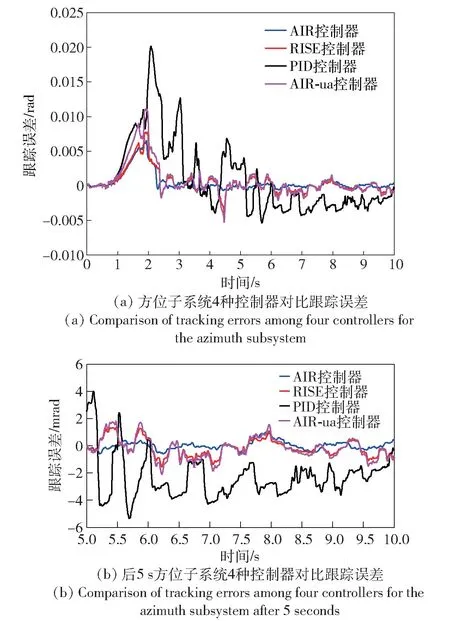
图11 工况1 方位子系统对比跟踪误差Fig.11 Comparison of tracking errors of the azimuth subsystem in Case 1
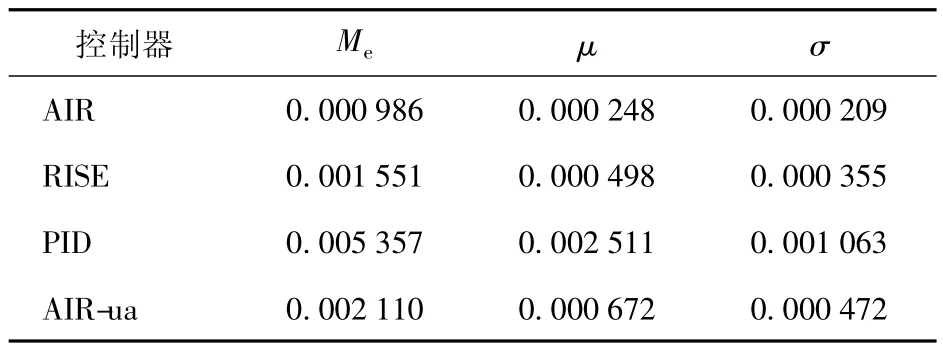
表1 工况1 方位子系统后5 s 性能指标Table 1 Performance indicators of the azimuth subsystem after 5 seconds in Case 1 rad
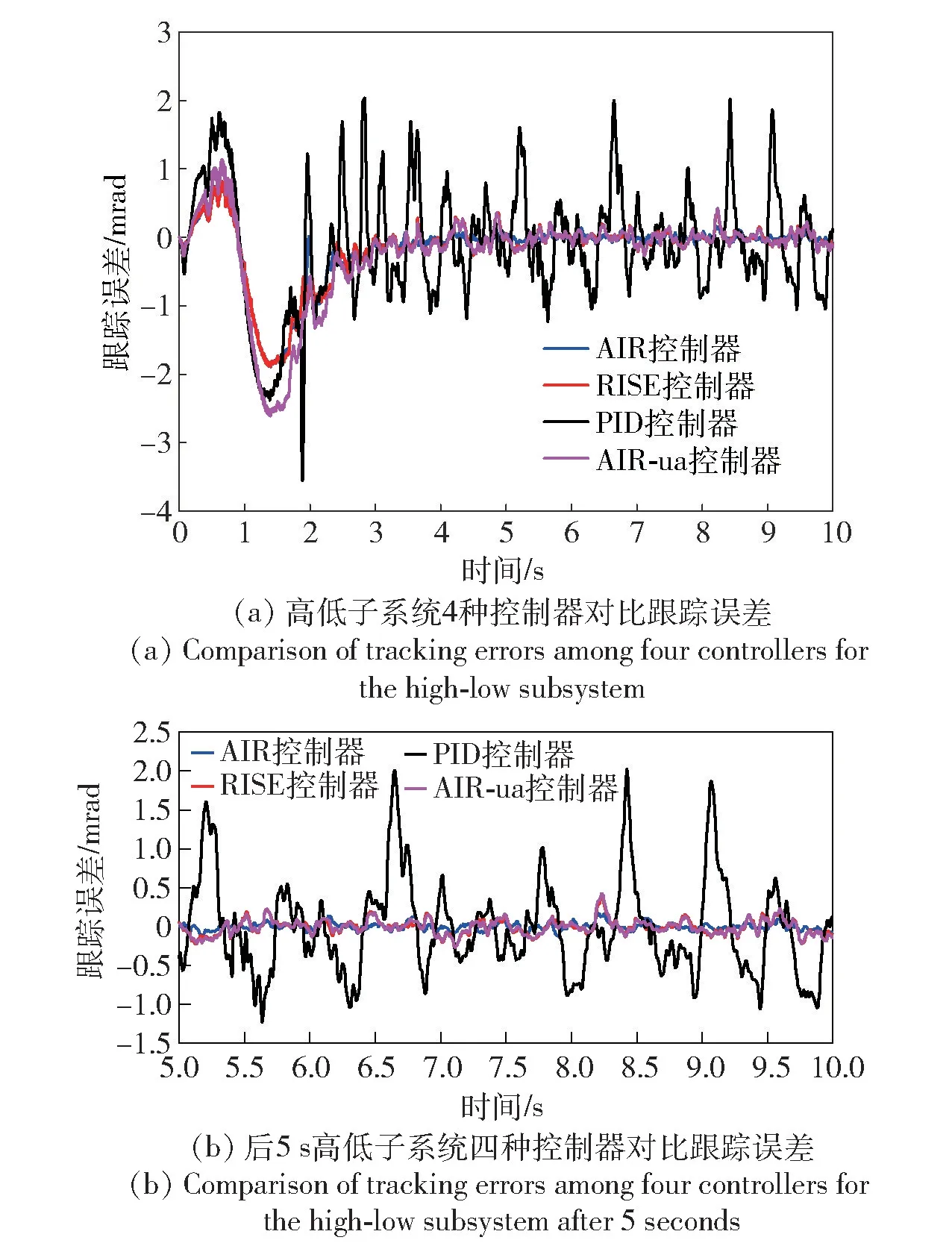
图12 工况1 高低子系统对比跟踪误差Fig.12 Comparison of tracking errors of the high-low subsystem in Case 1
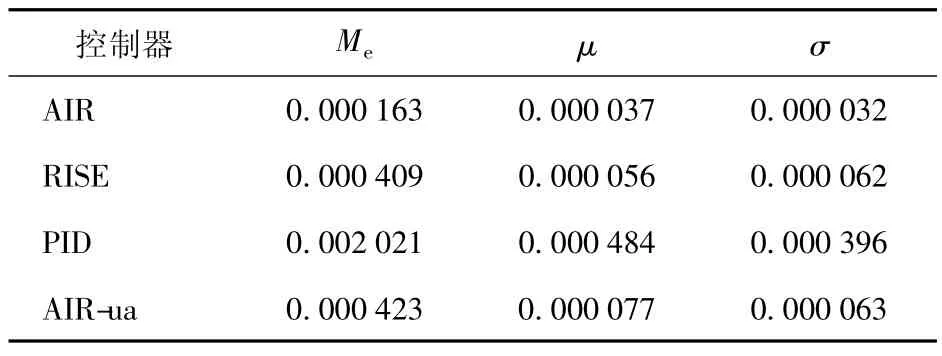
表2 工况1 高低子系统后5 s 性能指标Table 2 Performance indicators of the high-low subsystem after 5 seconds in Case 1 rad
图13 表示在AIR 控制器作用下,坦克双向稳定系统鲁棒增益β 的估计曲线,在试验过程中鲁棒增益的初值为任意设定,但是由于增益自适应律的在线调节功能,使得β 收敛到一个合适的值,避免传统RISE 控制器的工程局限性和该增益调节的随机性。图14 为行进间坦克双向稳定系统的控制输入,它们是连续且有界的。图15 表示Simulink 软件环境下伺服电机动态模型传输至Recurdyn 软件中方位子系统炮塔和高低子系统电动缸的驱动力矩。
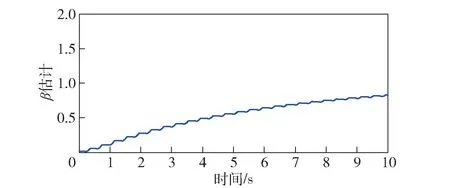
图13 工况1 鲁棒增益β 估计Fig.13 Estimated robust gain β in Case 1
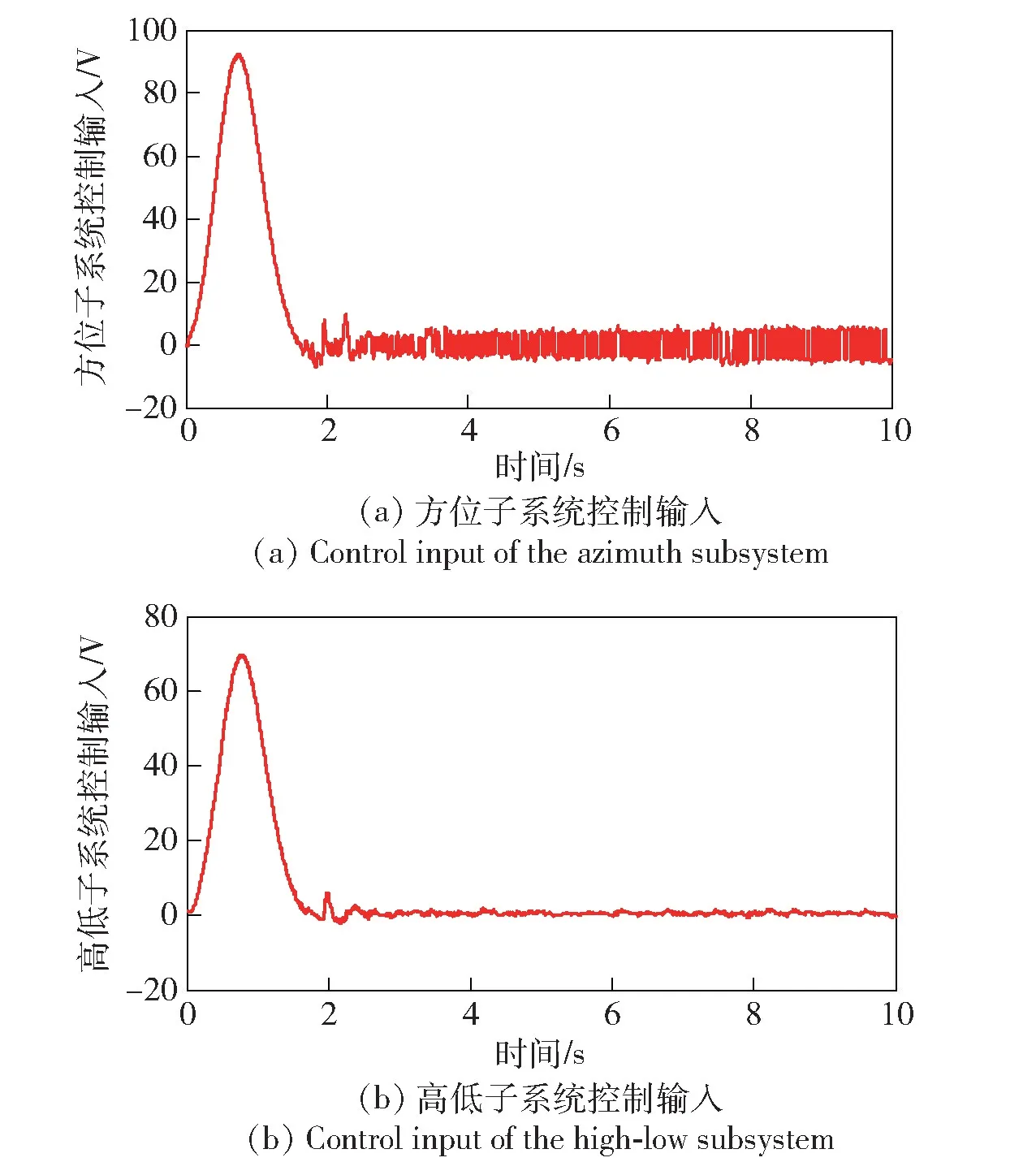
图14 工况1 坦克双向稳定系统控制输入Fig.14 Control inputs of the tank bidirectional stabilization system in Case 1
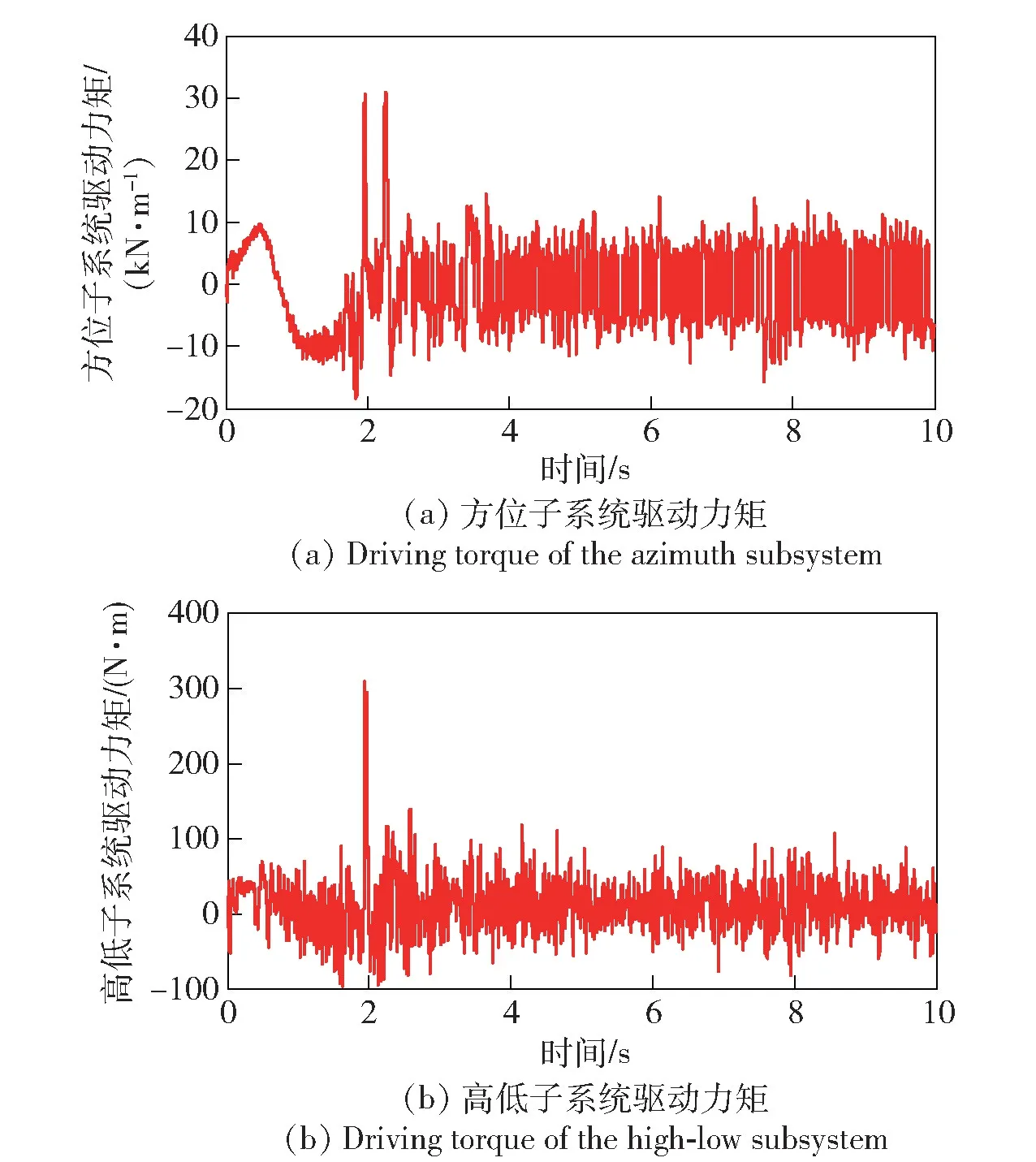
图15 工况1 坦克双向稳定系统驱动力矩Fig.15 Driving torques of tank bidirectional stabilization system in Case 1
工况2:为进一步验证坦克双向稳定系统的动态性能,双向稳定系统给定的期望跟踪指令在前3 s 时间内与工况1 相同,大于3 s 之后逐渐切换为正弦指令,同时考虑到实战状态下方位子系统和高低子系统角度旋转范围和频率的不同,分别给定的期望指令是x11d(t)=0.8sin(2π(t -3)),x12d(t)=0.04sin(0.8π(t-3)) 。图16 为工况2 在AIR 控制器作用下,双向稳定系统的实际角度对期望角度指令的跟踪过程。这种期望跟踪指令主要考验所提控制策略对炮塔/火炮的随动跟踪性能。对比图17 和图11 以及表1 和表3 可以清晰发现,随动角度的幅值和频率增大使得方位子系统的各项性能指标与工况1 相比均有一定的下降,但是本文提出的AIR 控制器在这种工况下依然获得最好的跟踪效果。进一步观察表3 可知,方位子系统的稳定精度分别提高了58.6%、88.3% 和69.1%。而对比工况1,分析图12 和图18 可知,高低子系统的稳定精度在这种情况下大幅下降,稳定状态下AIR 控制器的稳定精度为0.851 mrad,同比下降约96%,这样的结果表明,随动状态下对火炮的稳定性有较为明显的影响,不利于坦克炮准确进入射击门进行击发,也从侧面体现坦克火控系统末端双向稳定系统的重要性。表3 和表4的综合结果仍然说明本文提出的AIR 控制器依然具有更好的稳定性和鲁棒性。
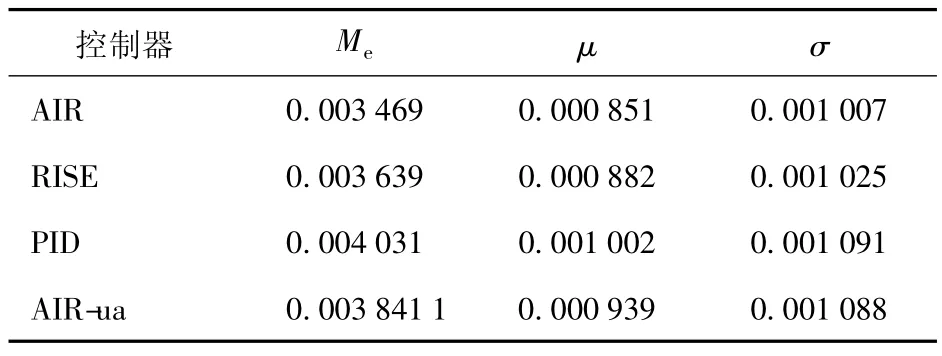
表4 工况2 高低子系统后5 s 性能指标Table 4 Performance indicators of the high-low subsystem after 5 seconds in Case 2 rad
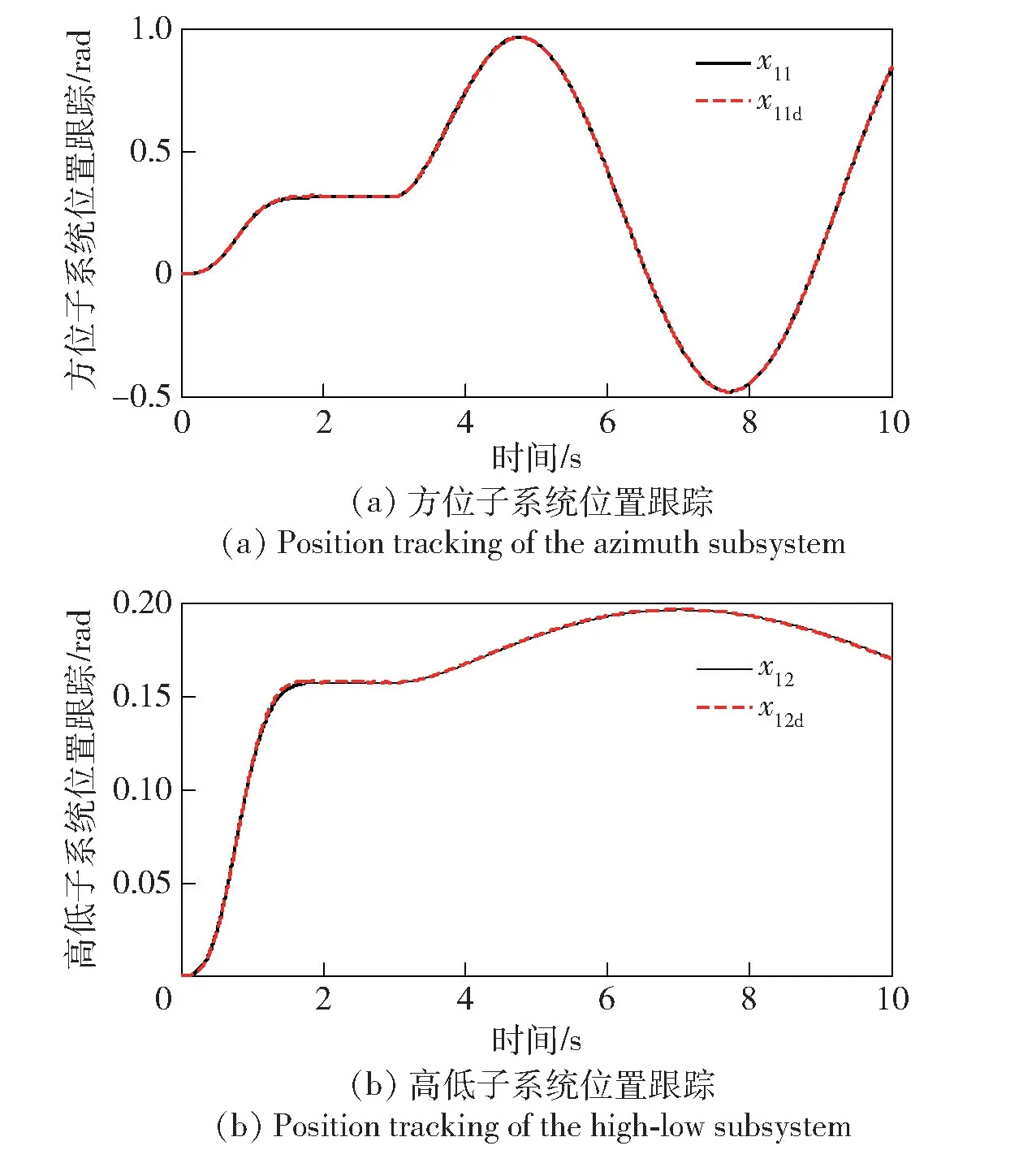
图16 工况2 坦克双向稳定系统位置跟踪Fig.16 Position tracking of the tank bidirectional stabilization system in Case 2
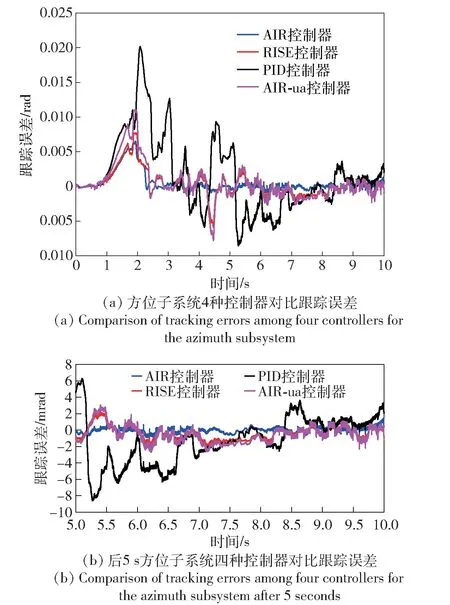
图17 工况2 方位子系统对比跟踪误差Fig.17 Comparison of tracking errors of the azimuth subsystem in Case 2

图18 工况2 高低子系统对比跟踪误差Fig.18 Comparison of tracking errors of the high-low subsystem in Case 2
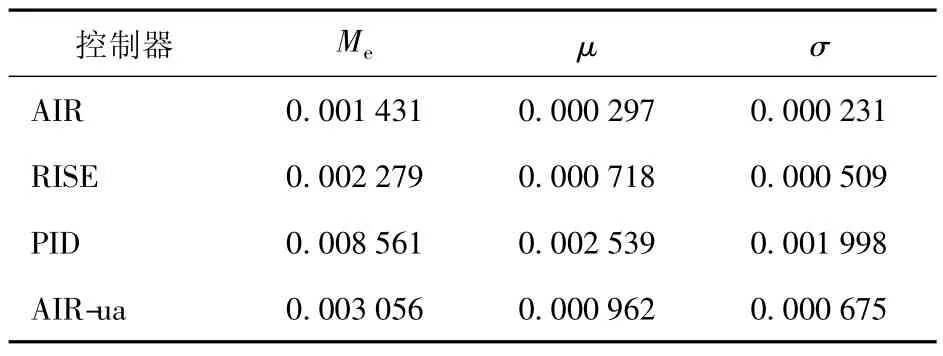
表3 工况2 方位子系统后5 s 性能指标Table 3 Performance indicators of the azimuth subsystem after 5 seconds in Case 2 rad
工况3: 为进一步验证坦克双向稳定系统的耦合特性和动态性能,给定的期望跟踪指令在前3 s时间内与工况1、工况2 相同,在时间大于3 s 之后两个逐渐切换为频率相同的正弦指令,给定的期望指令分别是x11d(t)=0.08sin(0.8π(t -3)),x12d(t)=0.04sin(0.8π(t-3)) 。图19 为工况3 在AIR 控制器作用下,双向稳定系统的实际角度对期望角度指令的跟踪过程,与工况2 相比,工况3 降低了方位子系统期望角度指令的幅值和频率,高低子系统的期望指令保持不变。分析 图20、图21、表5和表6,可以得出与工况1 和2 相同的结论:本文提出的AIR 控制器与传统的RISE 控制器、PID 控制器和AIR-ua 控制器相比,具有最优的跟踪性能,再次验证了AIR 控制器的有效性。同时与工况2 对比可以发现,随着方位子系统的幅值与频率降低,方位子系统的稳定精度提高了不超过25%,而高低子系统的稳定精度提高却更为明显,相比于工况2 高低子系统的4 种控制器均提高了约60%。同时方位子系统和高低子系统的结果均表明AIR 控制器比AIR-ua 控制器的跟踪精度搞,进一步体现了耦合特性补偿的作用。这也表明了坦克双向稳定系统之间存在动态耦合特性,耦合效应也是制约坦克武器命中精度的重要因素,坦克行进间方位子系统的运动将不可避免地影响高低子系统的稳定精度。
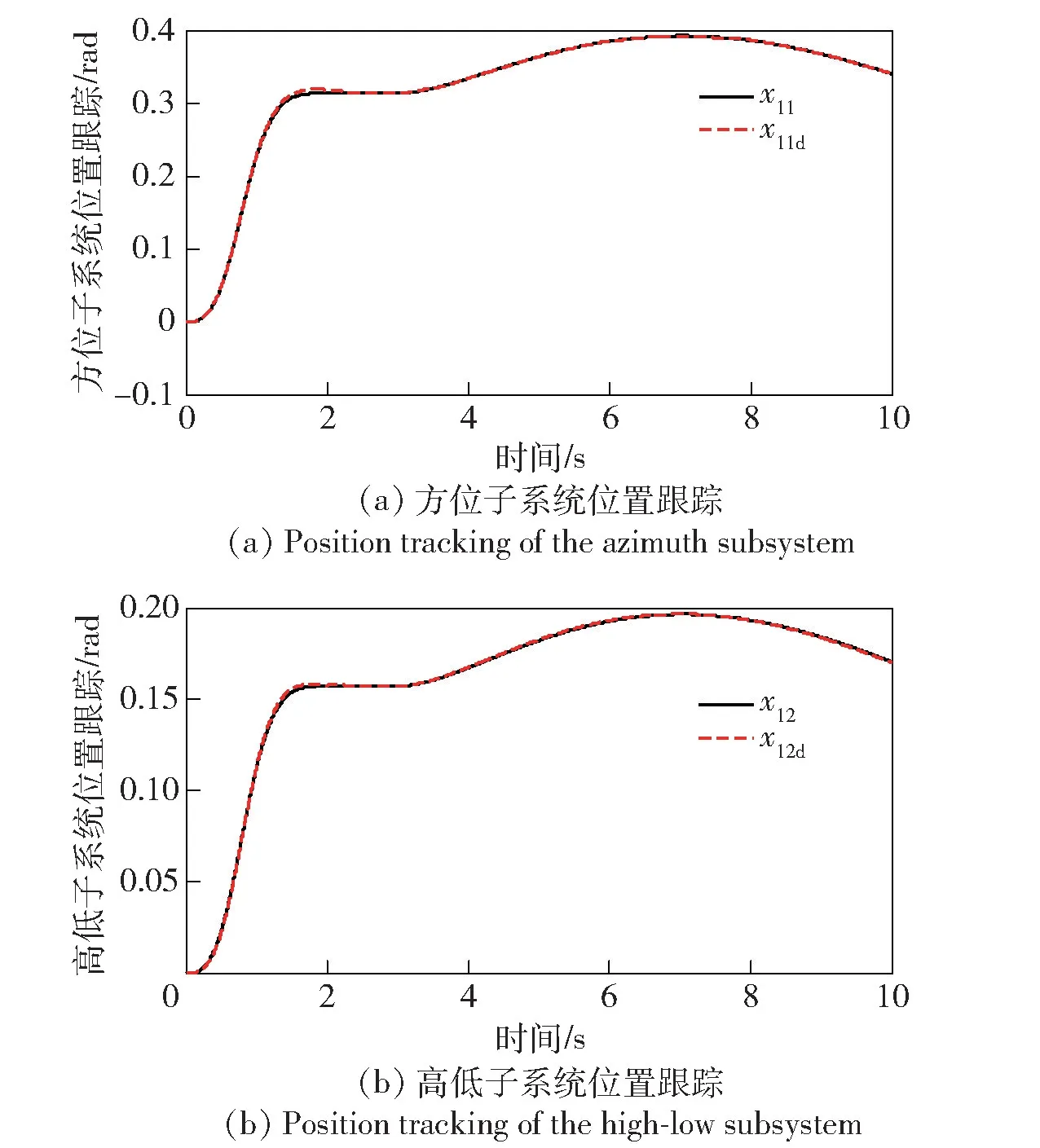
图19 工况3 坦克双向稳定系统位置跟踪Fig.19 Position tracking of the tank bidirectional stabilization system in Case 3
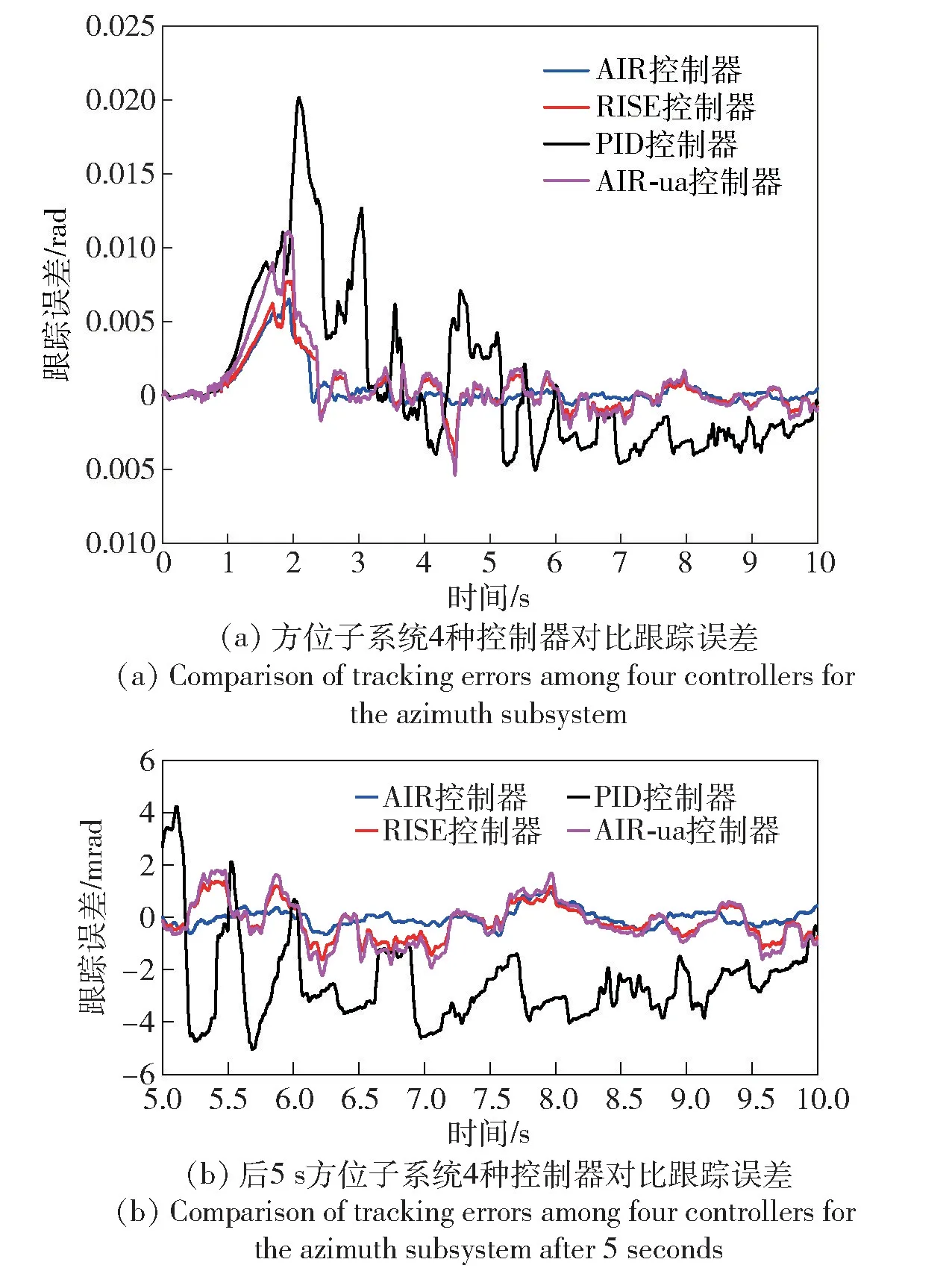
图20 工况3 方位子系统对比跟踪误差Fig.20 Comparison of tracking errors of the azimuth subsystem in Case 3

表5 工况3 方位子系统后5 s 性能指标Table 5 Performance indicators of the azimuth subsystem after 5 seconds in Case 3 rad
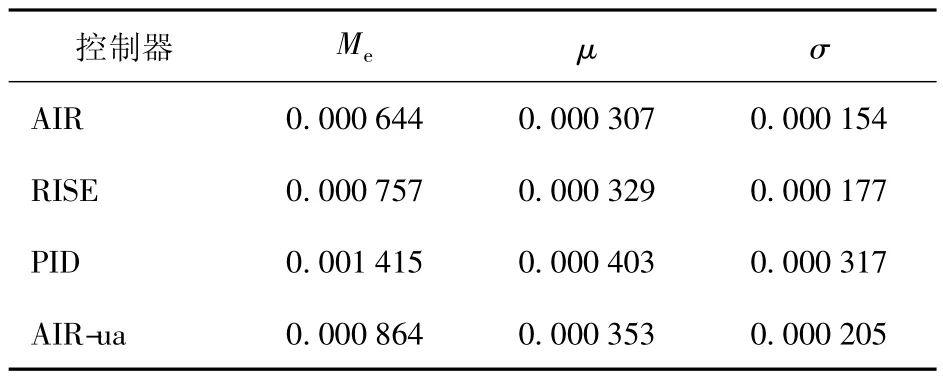
表6 高低子系统后5 s 性能指标Table 6 Performance indicators of the high-low subsystem after 5 seconds in Case 3 rad
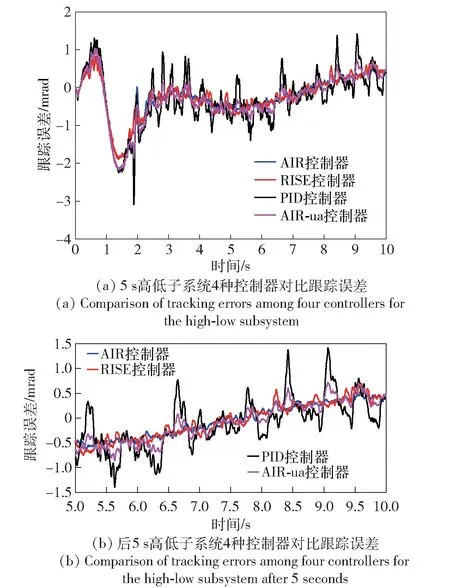
图21 工况3 高低子系统对比跟踪误差Fig.21 Comparison of tracking errors of the high-low subsystem in Case 3
6 结论
本文考虑全电坦克双向稳定系统为一个耦合性的、非线性的、不确定性的动力学系统,建立面向真实的全电坦克双向稳定系统机电控一体化解析动力学模型;基于Backstepping 法引入辅助误差信号并融合自适应的思想,设计了AIR 控制器;基于Lyapunov函数证明了系统的渐进跟踪性能;通过Recurdyn-Simulink 进行了联合仿真试验。得出以下主要结论:
1) 联合仿真试验证明了本文AIR 控制器的优异跟踪性能和积分鲁棒增益自适应良好的收敛性。
2) 所设计的AIR 控制器不需要预先知道行进间坦克双向稳定系统未知扰动的上界,而是通过自适应的方法不断更新以获取其上界,避免了传统积分鲁棒控制对于该增益调节的随机性和保守性。
3) 试验结果表明了坦克双向稳定系统方位子系统和高低子系统之间的两轴耦合特性,方位子系统运动幅值和频率的变化将影响高低子系统火炮的稳定精度;建立两轴耦合的坦克双向稳定系统动力学模型,更符合其动力学和运动学规律。
本文对提高高机动环境下坦克武器系统的稳定精度具有一定的参考价值。考虑到坦克武器系统的复杂性,后续还需要充分考虑其他非线性和不确定性,以提高基于模型控制策略的准确性;同时,控制策略的有效性还需通过实车试验进行验证,这些工作将在后续进一步完成。