基于MPC-MFAC 的双侧独立电驱动无人履带车辆轨迹跟踪控制
2023-02-27唐泽月刘海鸥薛明轩陈慧岩龚小杰陶俊峰
唐泽月,刘海鸥,薛明轩,陈慧岩,龚小杰,陶俊峰
(北京理工大学 机械与车辆学院,北京 100081)
0 引言
无人履带车辆由于良好的通过性、机动性,成为一种常用的地面无人机动平台[1]。作为无人驾驶领域的关键技术,轨迹跟踪控制也是无人履带车辆执行上述任务的前提。
然而,无人履带车辆高精度的轨迹跟踪控制目前还面临很多挑战[2]:1) 履带车辆是一个多输入多输出且包含复杂非完整性约束的强非线性系统,难以建立高精度的车辆模型;2) 履带车辆通常工作在复杂多变的野外工况下,系统的时变特性强;3) 系统内外部不确定因素包括简化模型中欠考虑的未建模部分、测量噪声、执行器饱和及延迟等导致的建模误差,以及接地状态变化、路面不平度激励、环境参数变化等导致的外部不确定性,它们的复合影响难以用单一的控制方法统一解决。综上所述,无人履带车辆轨迹跟踪控制问题仍然极具研究意义。
从总体的实现方式上出发,车辆轨迹跟踪控制算法可以分为基于模型的方法和基于数据驱动的方法[3]。
基于模型的轨迹跟踪控制依据建立的车辆运动学或动力学模型生成控制量。这种方法有诸多优点:1) 具有更明显的可解释性和物理意义;2) 可以减少调整或训练参数所需的工作量,因为它们是从车辆模型出发设计的;3) 所建立的模型还可以用于预测未来车辆的运动轨迹,以获取更多先验信息。因此,基于模型的方法引起了研究人员的广泛关注,其中,应用最多的当属模型预测控制(MPC) 方法。因为MPC 中滚动时域优化的过程与人类驾驶员的行为方式相似[4]。文献[5]针对履带车辆建立了基于滑移率的传统运动学模型和动力学模型,仿真证明了高速且参数完全准确时基于动力学模型的跟踪精度优于运动学模型。文献[6]运用文献[7]提出的履带车辆滑动参数估计方法建立运动学模型,考虑到不确定因素的干扰,提出了用于修正车辆状态和控制量的校正因子,搭建了带线性反馈校正的模型预测控制器。这些基于模型的控制方法理论上需要高精度的车辆模型,这在实际车辆控制中是不可能的。一方面绝对准确的建模是不存在的,在将现实物理模型进行抽象时一定存在某些假设和合理近似;另一方面,越高精度的模型越复杂,越难以用于实时求解。因此,真正的无人驾驶车辆控制采用的都是简化模型。基于模型的轨迹跟踪控制的不足也非常明显:1) 建模不准导致的模型失配或大或小,但一定客观存在,同时也导致在跟踪曲线时车辆跟踪误差的累积;2) 动态环境下的参数变化等难以人为直接建模表征,需要从车辆的状态表现中进行提取。
基于数据驱动的轨迹跟踪控制结构相对简单,不需要建立车辆运动学或动力学模型。经典的PID就是一种数据驱动控制器。但是由于PID 控制的线性特性,使得其不适合非线性强耦合系统。一些研究还引入学习的方法,其核心都是从数据中学习经验或者规律,再将经验或者规律应用至控制过程[8]。文献[9]考虑了车辆先验模型不准及环境的不确定性,利用高斯过程回归训练重复轨迹下的扰动模型,验证了其对于重复场景下差速转向车辆轨迹跟踪的有效性。然而,学习方法在实施时存在严重的局限性:1) 大部分依赖前期高质量的数据采集和离线训练,成本较高;2) 主要针对重复轨迹或相似环境,当环境动态变化程度较高,或离线训练与在线运行的工况差异较大时,难以保证效果,因此将其用于无人履带车辆的轨迹跟踪控制具有一定难度。除此之外,无模型自适应控制(MFAC) 也属于数据驱动的控制方法[10]。该方法迄今已应用在各个领域,如机器人外骨骼控制[11]、飞行器控制[12]、车辆跟踪控制[13]等。MFAC 控制器设计仅使用来自被控对象的输入/输出数据,不需要先验模型。主要针对非线性系统,在给定的范围内,收敛性和稳定性也得到了保证[14]。文献[15]利用MFAC 设计了一种基于预瞄偏差角的无人驾驶汽车横向控制方案,并在城市工况下分别进行了低速和高速验证。文献[16]聚焦于非结构化大曲率场景下的横向控制,并将改进粒子群优化(PSO)算法用于寻找最优初始参数,取得了良好的仿真效果。但未见其在无人履带车辆方面的研究成果。
本文提出了一种MPC 结合MFAC 补偿的双侧独立电驱动无人履带车辆轨迹跟踪控制方法。首先在平衡建模准确度和求解耗时的基础上,利用MPC进行前馈求解;然后针对MPC 中简化模型与车辆实际模型之间必然存在的差异以及外部环境不确定性,基于动态跟踪效果构建MFAC 算法进行补偿,即利用车辆实际轨迹与模型预测所得轨迹之间的误差,对MPC 求解的两侧履带速度控制量进行实时修正。本文将基于模型和基于数据的方法结合起来,其中,MPC 方法可以通过建立先验模型,减少调整和校准控制器的工作量,MFAC 方法用以修正实际执行与预测轨迹间的误差,补偿先验模型的不足,以提高轨迹跟踪精度。
1 履带车辆模型
本文针对双侧独立电驱动无人履带车辆的轨迹跟踪控制问题展开研究。对于控制,运动学模型虽然相对简单,方便用于实时控制,但缺乏动力学特性的考量,过于理想;动力学模型往往又建模复杂,具有高度非线性,而且相对精确的动力学模型也对很多需要额外辨识的参数的准确性提出了较高要求,用作实时控制的预测模型的成本很高。因此,本文将运动学模型作为MPC 控制器的预测模型,同时利用动力学模型为控制求解引入安全边界约束,相比利用动力学模型生成状态空间和预测模型,也降低了对动力学模型精确性的要求。
1.1 基于瞬时转向中心的履带车辆运动学模型
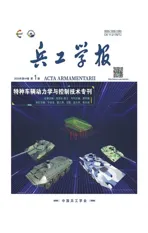
履带车辆通过调节两侧履带卷绕速度实现航向的改变,运动时两侧履带不可避免地存在滑移滑转。基于滑移率的传统运动学模型在一侧履带完全制动时,常见于履带车辆原地转向工况,无法根据公式反求出履带的牵连速度,因此引入基于瞬时转向中心的履带车辆运动学模型,如图1 所示。
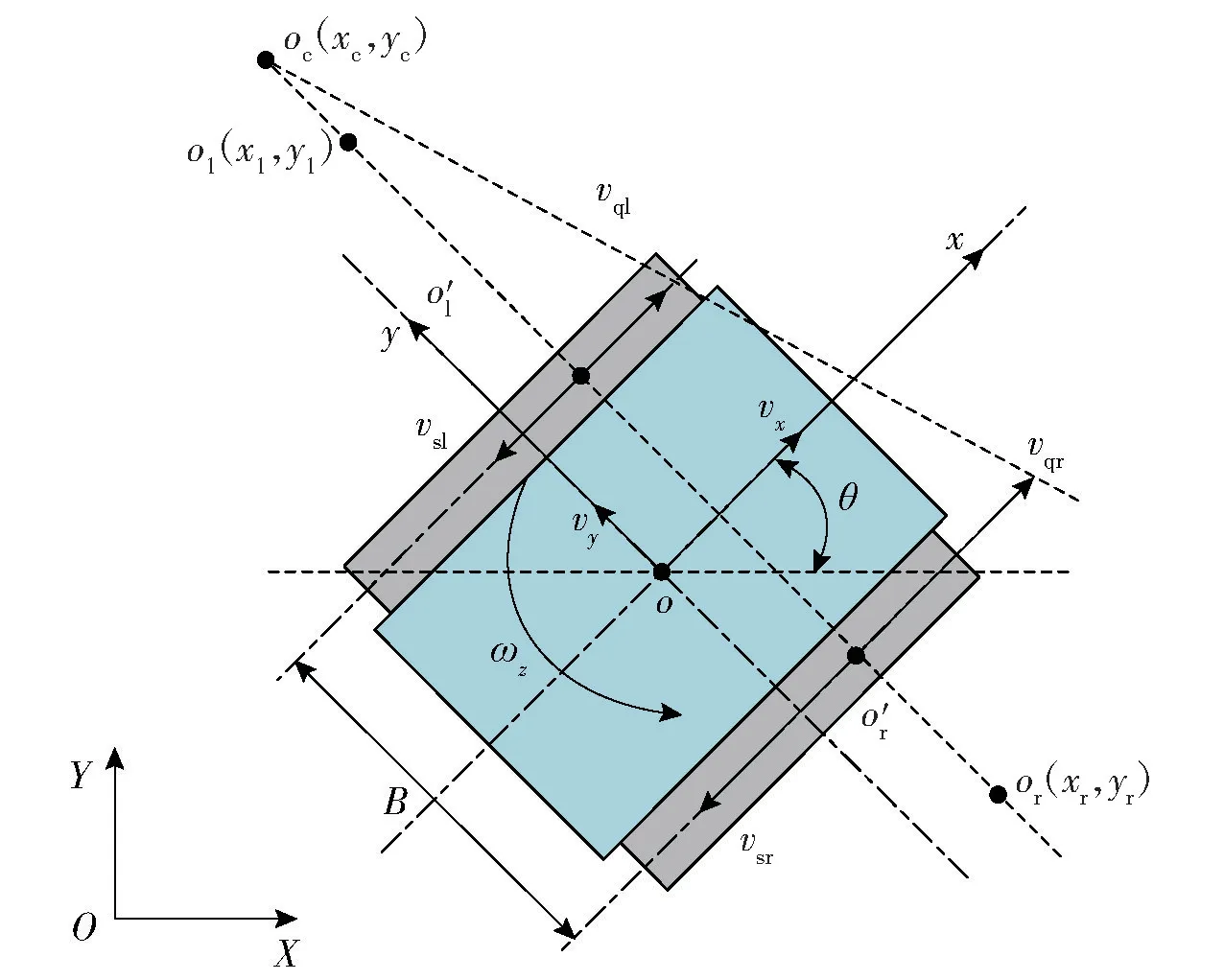
图1 履带车辆运动学模型Fig.1 Kinematic model of the tracked vehicle
其中,OXY 为大地惯性坐标系;履带车辆的位置和姿态可以定义为OXY 坐标系中的(x,y,θ),θ为履带车辆的航向角;假设质心位于车辆几何中心o,oxy 为车体参考坐标系;(vx,vy,ωz) 分别为履带车辆的纵向速度、横向速度、横摆角速度;oc为车体的瞬时转向中心,在车体参考坐标系下的坐标为(xc,yc) ;ol、or分别为左右两侧履带接地段的瞬时转向中心,其在车体参考坐标系下的坐标分别为(xl,yl)、(xr,yr) ;oc、ol、or位于同一平行于车辆横向对称面的直线上,称为转向中心线,该直线与左右两侧履带接地段中垂线的交点分别为点o'l和o'r;vsl、vsr分别为两侧履带接地段相对车体运动的卷绕速度;vql、vqr分别为履带车辆车身在点o'l和o'r处的牵连速度;B 为两侧履带中心距。
结合文献[7],履带车辆运动学微分方程如式(1):
式中:u 为控制量,u=[vsl,vsr]T;R(θ) 为与车辆航向角和瞬时转向中心有关的系数矩阵。理想情况下,左右两侧履带接地段的瞬时转向中心均位于两履带中心处:
瞬时转向中心反映了履带的滑移滑转特性,[yl,yr,xc]T可以通过组合导航等传感器反馈的车辆位姿信息(x,y,θ) 求解得到,也可以通过Levenberg-Marquardt 算法[17]或卡尔曼滤波[18]等方法进行实时估计,不再赘述。
1.2 履带车辆动力学模型
履带车辆动力学模型分析常用假设[19]如下:
1) 不计履带沉陷及履带板在侧向的推土效应;
2) 两侧履带接地长度相等,且不考虑履带张力的变化对接地压力的影响;
3) 转向行驶时阻力系数与直线行驶时相同;
4) 履带车辆空气阻力占比很小,可以忽略。
图2 为履带车辆动力学模型。其中,G 为车辆的质心;P1为质心与转向中心线的交点;P2为转向中心线与车辆纵向对称轴的交点;L 为履带接地长度;c1、c2为履带车辆质心相对几何中心位置的偏移量;s0为由离心力作用产生的转向中心纵向偏移量,即从质心到转向中心线的距离[20];R 为履带车辆的稳态转向半径;R'为车体瞬时转向中心oc与车辆质心G 的垂直距离;FG为履带车辆转向时的离心力;FGx、FGy分别为FG的纵向分量、横向分量;Fr,l、Fr,r分别为左右两侧履带的行驶阻力;Fxl、Fxr分别为左右两侧履带制动力、驱动力;Fyl、Fyr分别为左右两侧履带上切向力的横向分量;Mr,l、Mr,r分别为左右两侧履带所受的绕点o'l、点o'r的转向阻力矩。
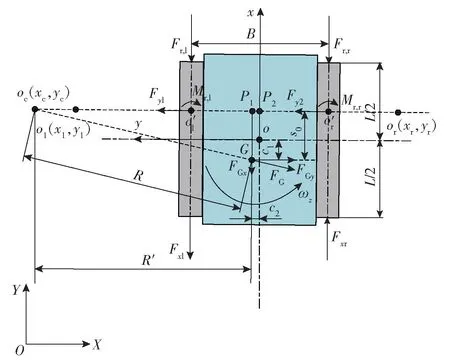
图2 履带车辆动力学模型Fig.2 Dynamic model of the tracked vehicle
在oxy 车体参考坐标系基于P2点建立平衡方程:
式中:δ 为旋转质量换算系数;m 为整车质量;J 为履带车辆绕z 轴的转动惯量。
根据式(3) 可以求出平地稳态转向时左侧履带制动力Fxl和右侧履带驱动力Fxr:
2 基于MPC 的轨迹跟踪控制模块
不同于PID、纯跟踪法等方法,MPC 优化的范围包括未来一段时域,而不是当前单一时间点。基于MPC 的轨迹跟踪控制模块接收来自规划模块的参考轨迹、来自惯导和底层电机反馈的车辆状态信息,结合车辆执行能力的边界约束,在一定预测时域和控制时域内进行滚动优化,求解出当前的最优控制序列,并将第一组控制量施加到被控对象上。
2.1 预测模型与目标函数
双侧独立电驱动无人履带车辆是一种强非线性系统。非线性系统通常可以抽象为
式中:ξ 为状态向量。选用对应的运动学模型,即式(1) 作为MPC 的预测模型。
进一步离散化处理,使用前向欧拉法,可以得到
式中:k 表示第k 个求解时刻;ΔT 为离散时间步长。
目标函数要综合反映控制过程,目的是使履带车辆快速、平稳、准确地跟踪规划模块下发的参考轨迹。因此目标函数包括多个部分,属于多目标协同优化。该模块采用如下形式的目标函数:
首先,跟踪问题要考虑对参考路径的跟踪精度,即令预测时域内累计的横向偏差、航向偏差最小:
式中:Np为预测时域;d、h 分别为车辆位置相对于参考轨迹的横向偏差、航向偏差;i 表示未来时域内第i 个时间点;Q、R 为对应项的权重系数矩阵。
然后,轨迹跟踪问题考虑到尽量匹配规划模块下发参考轨迹所带的参考速度:
式中:v 为跟踪的车速;vR为参考车速;P 为该项的权重系数矩阵。
最后,还需考虑轨迹跟踪的稳定性和平顺性:
式中:Nc为控制时域;M 为该项的权重系数矩阵。
2.2 约束设置
约束条件可以分为等式约束和不等式约束两类。等式约束一般设置为系统的预测模型,即表达了相邻时刻之间的状态转移关系;不等式约束一般根据车辆执行能力对控制量、控制量增量等给出边界限制。
事实上,等式约束除了式(1) 所示,还包括
关于控制量、控制量增量的不等式约束构建为
式中: umin、umax分别为控制量的下限值、上限值;Δumin、Δumax分别为控制量增量的下限值、上限值。
结合参考轨迹信息,由式(4) 可以得到预估的制动、驱动力需求值Fxl、Fxr,进一步得到预估车辆行驶的转矩需求值:
式中:Txl、Txr分别为转弯时左侧、右侧履带的转矩需求值;r 为履带车主动轮半径;ηe为总传动效率;i0为总传动比。驱动电机输出具有低速恒转矩、高速恒功率的特性,该电机外特性反映了车辆系统响应能力的限制。
式中:vs为单侧履带的卷绕速度;Pmax为允许的最大电机功率;kp为保护系数;Tx为式(13) 得到的单侧转矩需求值。该式可得到式(12) 中控制量的限值。
式中:a 为车辆加速度;φ 为地面附着系数;g 为重力加速度。该式反映了地面附着条件的限制,可得到式(12) 中控制量增量的限值。
3 基于MFAC 的补偿模块
基于模型的控制算法需要高精度的运动学模型或动力学模型,准确无误地反映动态环境下的真实物理系统,这在实际车辆控制中是不可能的。采用简化的先验模型又必然造成误差,这种误差通常具有一定的规律性。除了上述模型失配的主要影响外,外部环境的不确定性也带来了一部分误差。反映在模型预测控制中,就是基于预测模型得到的预测轨迹与车辆实际行驶的轨迹有所不同,如图3 所示。
图3 车辆轨迹示意图Fig.3 Schematic diagram of vehicle trajectory
考虑到基于MPC 的轨迹跟踪控制模块仅对未来一段时域的跟踪效果进行预测,缺少对历史时刻实际跟踪特性的考量,而历史的跟踪效果却真实反映了系统的未建模部分,因此本文引入基于无模型自适应控制的补偿模块,针对历史一段跟踪时域内预测轨迹与车辆实际轨迹之间的误差,对MPC 输出的控制量进行补偿修正。
3.1 MFAC 理论
MFAC 的理论核心是将被控对象进行动态线性化。对于多输入多输出系统,可以表述为
式中:f(·) 为未知非线性函数;ny和nu为两个未知的正整数(下标y 和u 分别表示系统输出和控制输入) ;y(k) ∈Rm、u(k) ∈Rn分别为k 时刻的m 个系统输出和n 个控制输入量,n≥m。
式(16) 可以进一步简化,定义两个固定的值来分别代表ny和nu,即只考虑历史最近固定时间范围内的系统输出和控制输入对当前时刻系统输出的影响。因此,可以维护一个信号量:
对于MIMO 系统,首先需要定义两个约束条件:除有限时刻点外,f(·) 对控制变量的偏导数连续;除有限时刻点外,系统满足广义Lipschitz 条件,即对任意k1≠k2,k1≥0,k2≥0 以 及,有
式中:b >0,是一个常数。
实际非线性系统通常满足上述约束条件。第一个约束是控制系统设计中对一般非线性控制的典型约束条件。第二个约束是系统输出变化率上界的一种限制[10]。然后给定整数0 时,一定存在一个伪分块Jacobian 矩阵(又简称为PPJM) 的时变参数矩阵Φf,Ly,Lu(k),使得被控系统能够转化为如下数据模型:
MFAC 算法定义了如下目标函数:
式中:y*(k +1) 为k +1 时刻的期望输出;y(k +1)为k+1 时刻的实际输出;λ >0 为权重因子。
将式(19) 代入式(24) 中,对u(k) 求导,并令其等于0,然后化为不含矩阵求逆运算的形式,得到
式中:η∈(0,2]为步长因子。
由于数据模型中时变参数矩阵是估计得到的,需要实时对估计值进行自检和约束。MFAC 理论中引入了对时变参数矩阵的重置算法,使其具有更强的对时变参数的跟踪能力:
3.2 基于MFAC 的补偿模块设计
本文算法整体结构设计如图4 所示。图4 中:红色虚线框为本文算法的核心模块;(xR,yR,θR,vR) 为规划模块下发的参考轨迹,即轨迹跟踪控制器的跟踪目标;vp,s1(k)、vp,sr(k) 为k 时刻MPC 求解出的最优控制序列的第一组控制量;MPC 在求解出控制量后,就可以得到预测时域内的预测轨迹,预测轨迹反映了先验模型绝对准确、没有建模误差和外部不确定性的理想情况下车辆未来的位置;(xp(k|k -1),yp(k|k-1)) 为k-1 时刻预测的k 时刻车辆应到达的位置;(xr(k),yr(k)) 为k 时刻车辆实际到达的位置,实际情况下两者存在一定差别;(sp(k|k -1),dp(k|k-1)) 和(sr(k),dr(k)) 分别为(xp(k|k -1),yp(k|k -1)),(xr(k),yr(k)) 在Frenet 坐标系下的表示;vr,sl(k)、vr,sr(k) 分别为k 时刻带补偿的左右履带卷绕速度控制量;[vc(k),ωc(k) ]T为k 时刻速度和横摆角速度的补偿量;[vc,sl(k),vc,sr(k) ]T为k 时刻左右侧履带卷绕速度的补偿控制量。
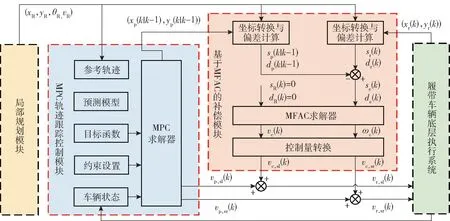
图4 基于MPC-MFAC 双侧独立电驱动无人履带车辆轨迹跟踪控制算法整体结构图Fig.4 Overall structure diagram of trajectory tracking control algorithm for dual independent electric drive unmanned tracked vehicle based on MPC-MFAC
在基于MFAC 的补偿模块中,为了便于对横纵向不确定因素进行分析和补偿,本文将位置点从笛卡尔坐标系转换到Frenet 坐标系下进行表示。图5为Frenet 坐标系对车辆运动描述示意图。履带车辆位置在OXY 坐标系下为(x,y),将(x,y) 投影到参考轨迹上,垂足为Po。Frenet 坐标系是一种由曲线上切向量和法向量构成并随动点Po沿曲线移动的坐标系,因此能够很好地反映车辆相对于参考轨迹的横纵向位置信息。履带车辆位置在Frenet 坐标系下为(s,d),s 为参考轨迹起点到Po的弧长。因为参考轨迹实际是由一系列离散的轨迹点组成,如图5 中的黑色圆点,所以(s,d) 可以根据几何关系,由离Po最近的参考轨迹点P'和P″计算得到,这里不作展开。
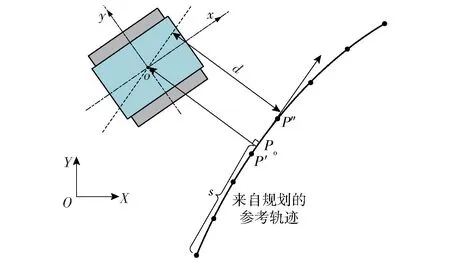
图5 Frenet 坐标系下车辆运动描述示意图Fig.5 Schematic diagram of vehicle motion description in the Frenet coordinate system
车辆实际轨迹与预测轨迹间的误差表示为
MFAC 算法的系统期望输出为y*=[sR,dR]T=[0,0]T,k 时刻系统的实际输出为 y (k)=[se(k),de(k) ]T,显式求解得到补偿量为uc(k)=[vc(k),ωc(k) ]T,转换得到
为了确保补偿控制量不至于过大,会对其进行限幅处理,本文将vc,sl(k)、vc,sr(k) 的数值限制在±0.25 范围内。
在仍满足式(12) 的前提下,将该控制量下发执行,若不能满足式(12),则仅下发控制量vp,sl(k)、vp,sr(k) 。
3.3 基于改进PSO 算法的MFAC 补偿模块参数整定
MFAC 算法可以实时利用输入输出数据自动对动态被控系统进行估计并建立数学模型,自适应性较强且可以显式得到解析解,计算简单。但是MFAC 算法也必须对关键参数进行初始化。文献[10]给出了部分参数的影响规律以及经验值,如等。MFAC 算法维护的信号量包含一段历史滑动时间窗口,其中线性化长度常数Ly、Lu越大,理论上数据模型越能更好地拟合复杂动态,但是ρi和中需要初始化的参数也就越多,给人工调参带来了难度。对于这种最优参数提取问题,相关的研究也不少,典型的有遗传算法、蚁群算法、PSO 算法及其变种等。相比之下,普通PSO 算法结构更简单,计算量更小。但是普通PSO 算法收敛速度快的同时也会导致容易陷入局部最优。因此,有学者提出了可变惯性系数的改进PSO 算法,其通过引入惯性系数平衡了全局探测和局部搜索能力,得到广泛应用。本文采用随机式惯性策略PSO。
首先需要初始化粒子群信息,其中单个粒子可以用两个N 维向量表述其位置和速度,位置描述了参数组合信息,速度用于下一次更新。
本文基于MFAC 控制器简捷性的考虑,选取伪阶数Ly=3,Lu=3。这里粒子的长度N=Ly+Lu+3,待优化的参数组合为x=[ρ1,ρ2,…,ρLy+Lu,μ,λ,η]T。
粒子群初始化为

然后在每轮迭代中需要利用适应度函数作为评价指标,评价各粒子位置所代表的参数组合下的轨迹跟踪效果。考虑如下适应度函数:
式中:w1、w2、w3、w4分别为对应项的权重系数,w1、w2、w3、w4分别取分别为j1、j2、j3、j4的均值;de为当前时刻车辆实际横向偏差与预测横向偏差的差值;se为车辆实际行程与模型预测得到的预测行程的差值;Δvc,sl、Δvc,sr分别为左侧、右侧履带卷绕速度的补偿控制量的变化量。
每轮迭代中,各个粒子通过比较各自历史最优解的适应度值得到各自当前最优解,即个体极值;在个体极值中选出适应度值最小所对应的粒子位置,即全局极值。然后对粒子的位置和速度进行更新,即粒子群的进化过程。更新规则如下:
式中:N(μt,σ)为服从正态分布的随机数;μmin、μmax分别为μt的最小值、最大值;rand(0,1)为(0,1) 范围内服从均匀分布的的随机数。
4 实验验证
为了验证算法框架的有效性,在机器人操作系统(ROS) 和仿真平台(VREP) 中完成双侧独立驱动履带车辆的仿真实验,仿真模型如图6 所示。仿真模型的部分参数如表1 所示。图7 为本文研究的电机外特性图。表2 为根据经验设置的模型预测控制器参数。表3 为基于经验和改进PSO 算法整定得到的MFAC 控制器参数。
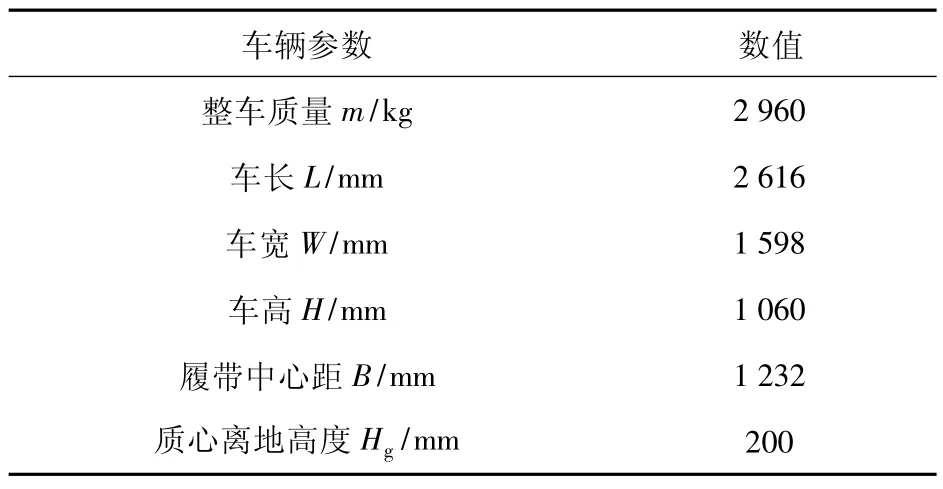
表1 仿真模型参数Table 1 Parameters of the simulated vehicle
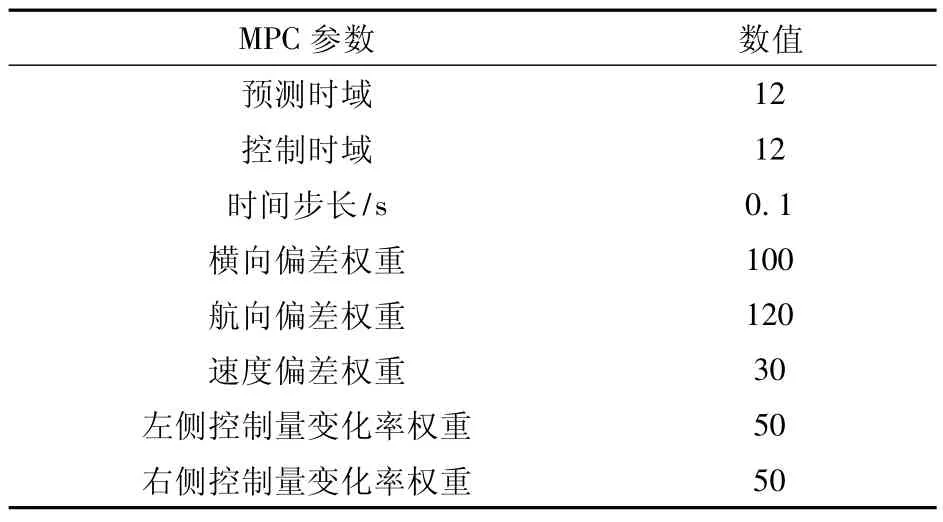
表2 MPC 控制器参数Table 2 MPC controller parameters
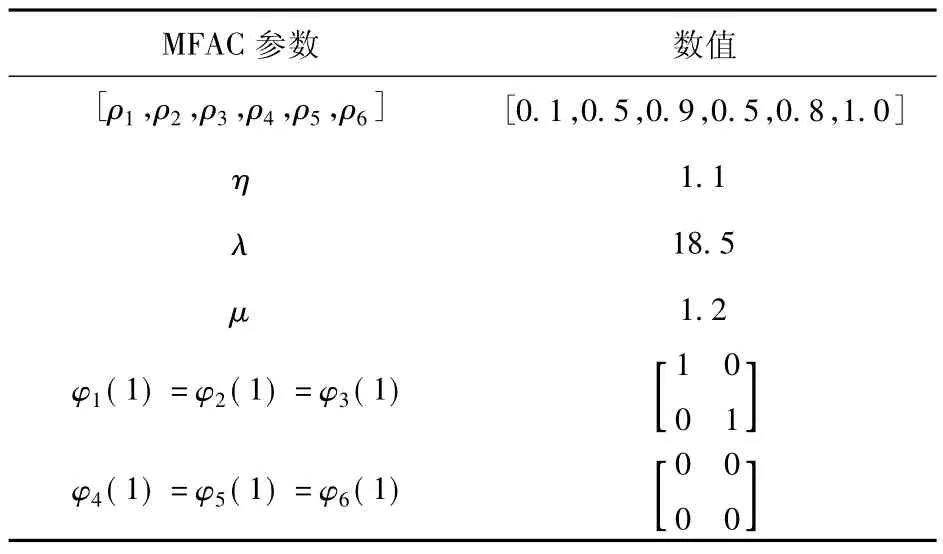
表3 MFAC 控制器参数Table 3 MFAC controller parameters

图6 VREP 中的仿真模型Fig.6 Simulation model in VREP
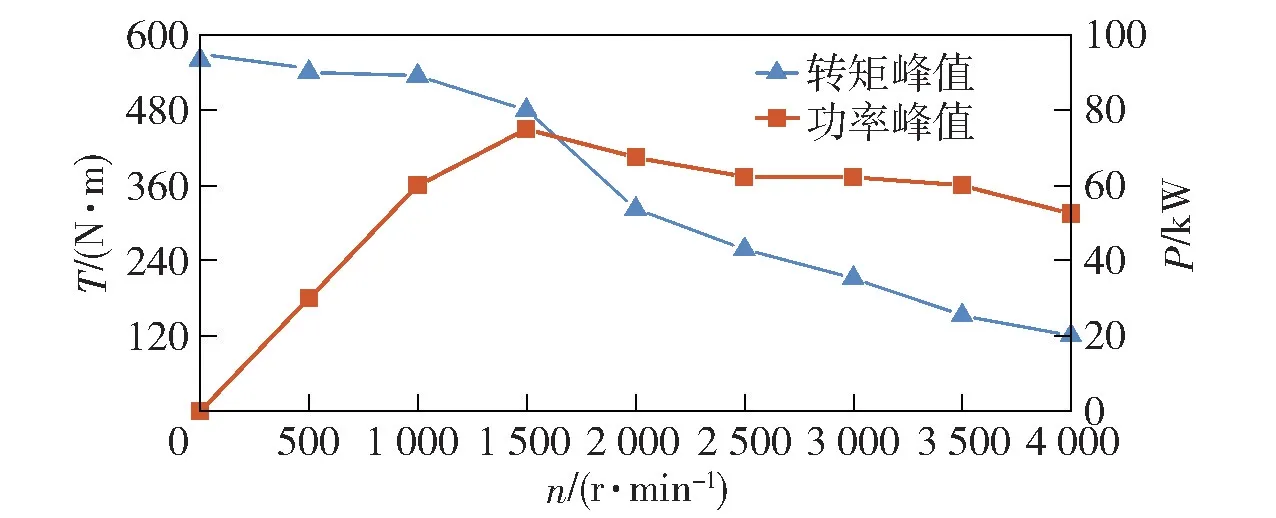
图7 电机外特性图Fig.7 External characteristics of motor
将本文所提方法与纯MPC 方法进行相同扰动工况下的仿真对比。建模误差和外界不确定性通过设置执行器执行误差的方式进行添加。现实世界存在多种频率的周期信号和随机信号,本文对其进行简化和放大,为了测量零均值周期扰动和随机扰动的影响,左侧履带卷绕速度的执行误差为ve,sl(t)=0.2sin (10πt/72) ±0.08rand(0,1),右侧履带卷绕速度的执行误差设置为ve,sr(t)=0.15cos (10πt/72) -ve,sl(t) ±0.08rand(0,1) 。系统的总体控制周期均设置为100 ms。MPC 部分采用非线性求解器IPOPT 进行求解。定义无人履带车辆的初始位置为(-1.00 m,20.00 m),初始航向角为(π/2) rad。
图8(a) 展示了规划下发的参考轨迹和两种控制方法的实际跟踪效果,图8(b) 展示了规划下发的参考车速和实际车速,图8(c) 和图8(d) 分别展示了0.2 s 的预测时长下实际行程与基于模型的预测行程间的误差、实际横向偏差与预测横向偏差间的误差,图8(e)、图8(f) 分别为横向偏差和航向偏差的对比图,图8(g) 为本文方法中两部分的分别用时。表4 展示了仿真实验轨迹跟踪效果指标的统计值。
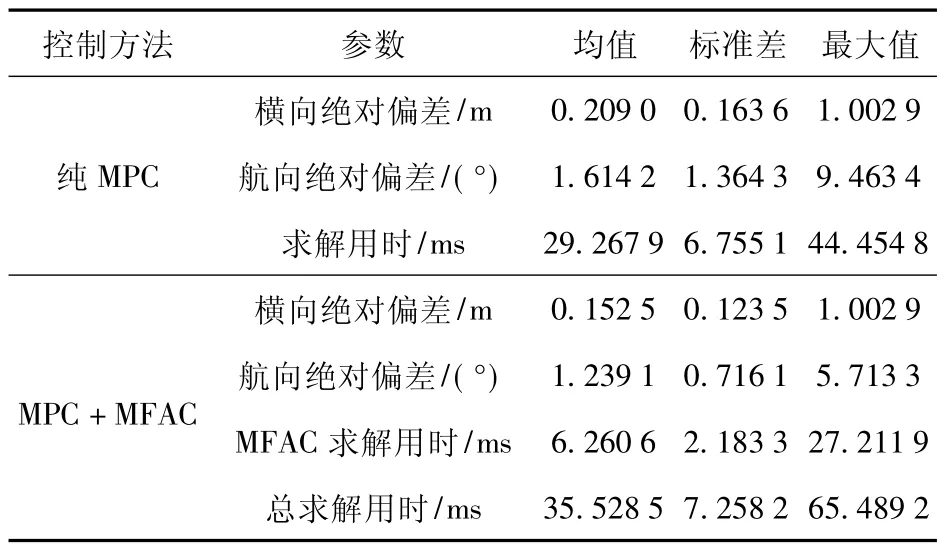
表4 仿真实验轨迹跟踪效果统计Table 4 Statistical results of tracking performance of simulation
结合图8 和表4 进行结果分析可知: 本文提出的方法能够对系统内外不确定性进行补偿,使得车辆实际轨迹与基于先验模型的预测轨迹间的偏差的均值和标准差更小,使车辆能够更准确地执行预测轨迹,提高了MPC 帧间求解的稳定性,最终也提高了轨迹跟踪的整体精度,即减小了横向绝对偏差均值和航向绝对偏差均值。在模拟大扰动情况下,横向绝对偏差均值、航向绝对偏差均值分别可以降低27.01%、23.24%。此外,本文方法也可以在初始大横向偏差的情况下更快速收敛到参考轨迹。
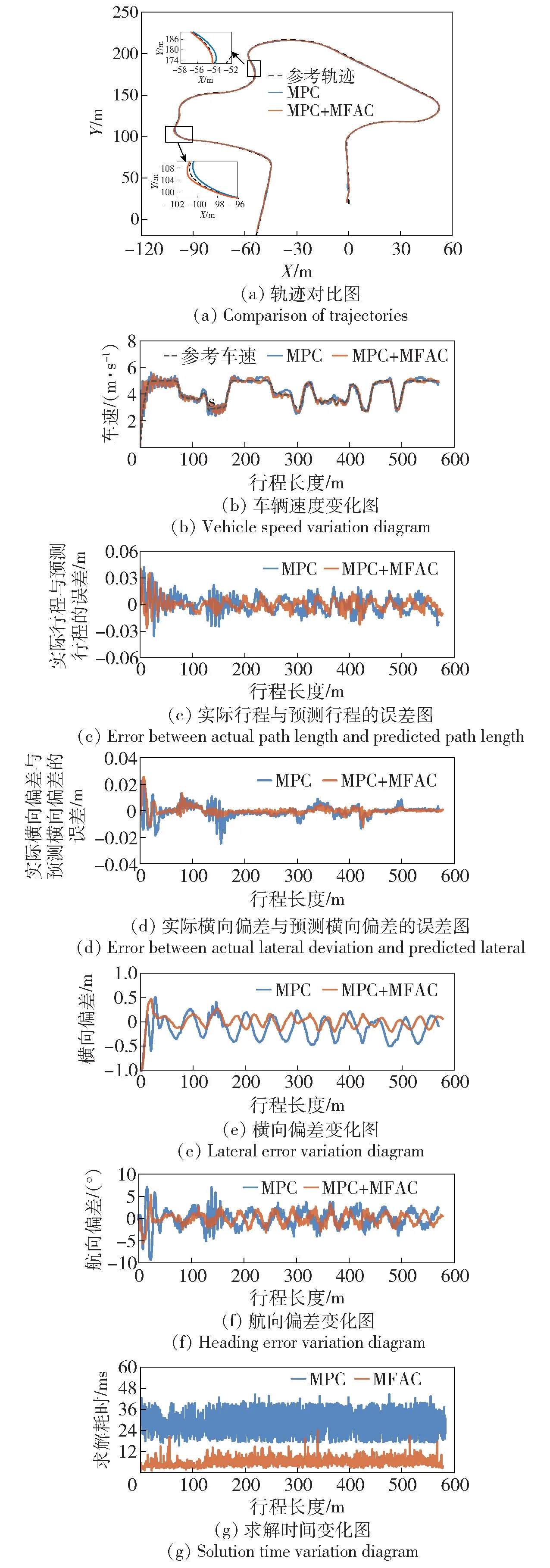
图8 仿真试验跟踪效果图Fig.8 Trajectory tracking performances of simulation
虽然本文方法增加了控制器结构,但是由于补偿模块可以显式求出解析解,总求解用时均值仅增加了6.260 6 ms,对实时性能的影响不大,即使对于最差的总求解用时情况而言,65.489 2 ms 也远小于100 ms,满足控制周期的要求。由此可见,本文方法在提高轨迹跟踪的精度以及维持时间成本上做到了较好的均衡。
5 结论
1) 本文建立了基于瞬时转向中心的履带车辆运动学模型,结合动力学约束设计了基于模型预测的轨迹跟踪控制器,考虑到车辆执行能力的同时降低了对动力学模型精确性的要求。
2) 本文重点针对无人履带车辆轨迹跟踪控制存在建模误差和外界不确定性等挑战的情况,提出了一种基于MPC 结合MFAC 补偿的双侧独立电驱动无人履带车辆轨迹跟踪控制方法。利用历史实际车辆轨迹与模型预测所得预测轨迹之间的误差,对MPC 输出的控制量进行补偿,实现了基于动态跟踪效果的自适应控制量修正。
3) 通过对ROS-VREP 联合仿真试验的结果分析,本文方法在不显著增加求解耗时的前提下,实现了更高的轨迹跟踪控制精度。在相同的模拟大扰动情况下,与纯MPC 方法相比,横向绝对偏差均值、航向绝对偏差均值分别可以降低27.01%、23.24%。验证了本文方法的有效性,能够在一定程度上抑制系统内外不确定因素的对轨迹跟踪的不利影响。