偏振导航测试系统空间分辨率研究*
2023-02-24李得先
崔 岩,刘 康,李得先,周 野
(大连理工大学精密与特种加工教育部重点实验室,辽宁大连 116024)
0 引言
在大自然中存在一种天空偏振光分布模式[1-2],具有不受外界干扰、误差不随时间累积等优点。基于该原理研制的偏振导航测试系统通过获取当前天空偏振光分布模式图,提取太阳子午线[3]信息,并结合此时太阳方位角最终实现导航功能。为了提高偏振导航测试系统的精确度,需要建立普遍适用的空间域、时间域误差模型[4],空间分辨率[4]可以形象地描述偏振导航测试系统的空间域误差值大小。因此,探究偏振导航测试系统的空间分辨率分布关系对实现高精度导航至关重要。
国内外学者对其进行大量研究,Zittrell等[5]通过注射神经生物示踪剂进行昆虫大脑细胞识别,论证了蝗虫通过直接光照与天空偏振模式相结合的方式实现导航。贺晓雷等[6]提出了一种可以直接应用的太阳方位角求解公式。桂文胜等[7]改进了太阳位置计算公式,仿真分析了不同纬度,日出时刻、日出方位角、白天时长和正午太阳高度角的变化规律。Horváth等[8]通过测试日出时天空偏振模式变化情况,探究了偏振度、偏振方位角随太阳高度角、太阳方位角的变化关系。Kreuter等[9]利用带有旋转偏振器的自动鱼眼相机系统测量了全天空偏振模式的分布。朱志飞等[10]提出了一种基于瑞利散射的太阳自主定位方法计算地理位置信息。Cai J等[11]针对偏振光导航系统航向误差随纬度的增加而增加的情况,提出一种改进的偏振光导航辅助的快速测量算法。现有研究主要是优化太阳位置信息求解公式,以及如何获取更高精度的地理位置信息,实现高精度导航。
本文基于瑞利散射理论,提出了经度分辨率和纬度分辨率的概念,描述偏振导航测试系统的空间分辨率。搭建了天空偏振光空间分辨率仿真平台,逐一分析了半球区域经度分辨率和纬度分辨率分布规律,建立了偏振导航测试系统空间分辨率分布模型。
1 基本原理
1.1 偏振导航测试系统仿真原理
随着地球绕太阳周期性的自转和公转,太阳光照射到地球表面物体的角度也有所不同。理想大气条件下,基于瑞利散射理论,构建地平坐标系如图1所示,描述太阳光在大气中单次散射过程。O点为当前观测者所处地理位置点,N、E、S、W分别为正北、正东、正南和正西方向,XO Y平面即代表观测者所处的地平面,Z表示天顶点,M表示此时太阳所处位置。太阳M同地平面的夹角θM即所求太阳高度角,水平面向上为正,向下为负;M O所在直线在XOY平面的投影同正南方向夹角ϕM即所求太阳方位角,从正南向西为正,向东为负。V为天空中任一被观测粒子所处位置,θ为其观测高度角,ϕ为其观测方位角。此时太阳位置坐标(θM,q M),粒子坐标(r,f,q),r为地平坐标系球半径。

图1 地平坐标系
任一时刻、任一经纬度地区太阳高度角、太阳方位角可以通过下式计算获得[12]:
式中:φ为纬度;W为太阳时角;d为太阳赤纬角。
太阳时角、太阳赤纬角可通过查阅天文年历获得,为了便于实际应用和编程分析,可以采用张闯等[13]提出的方法进行计算。基于瑞利散射理论,根据几何关系可得被观测点处偏振方位角c为:
天空各点的偏振方位角值,投影至X O Y平面,组成天空偏振方位角分布图如图2所示。图中黑色直线即太阳子午线[3],红色直线为体轴方向(此时为南北方向),太阳子午线与体轴方向夹角s n为导航参考角[14]。

图2 天空偏振方位角分布
在基于瑞利散射的理想大气模式下,如图2所示的天空偏振方位角分布图关于太阳子午线呈对称关系,太阳子午线所在区域的偏振方位角为±90°,利用最小二乘法对偏振方位角值为[60°,90°]U[-60°,-90°]样本点区域进行直线拟合,由直线斜率获取导航参考角值。
因此,导航参考角可通过如图3所示流程图计算获得。偏振导航测试系统通过获取当前导航参考角,结合当前太阳方位角,两者相减可得体轴同南北方向夹角即当前朝向方向,实现导航。

图3 导航参考角计算流程
1.2 天空偏振光空间分辨率仿真平台原理
为了实现偏振导航测试系统高精度测量,需要对其在特定的时间域、空间域进行测量误差分析,本文提出了偏振导航测试系统经度分辨率、纬度分辨率的概念来描述测试系统的空间域误差大小。经度分辨率即纬度不变,经度变化一定范围,偏振导航测试系统输出参数变化量为其仪器分辨率。纬度分辨率即经度不变,纬度变化一定范围,偏振导航测试系统输出参数变化量为其仪器分辨率。由此可通过经纬度分辨率这一变量值,描述空间域内偏振导航测试系统测量误差值。某地理位置经纬度分辨率越大,表征该地理位置偏振导航测试系统经纬度方向测量误差越大;经纬度分辨率越小,表征该地理位置偏振导航测试系统经纬度方向测量误差越小。同一时刻,不同地理位置,经度分辨率,纬度分辨率值各不相同。同时,由于偏振导航测试系统输出参量即导航角可以由导航参考角简单换算获得,因此可以借由导航参考角的变化替代偏振导航测试系统输出参量的变化。为了探究经度变化率、纬度变化率的分布规律,本文提出了如图4所示的经纬度分辨率计算方法。

图4 经度纬度分辨率计算流程
以经度分辨率为例,为了计算某时刻某地理位置经度分辨率,初始设置时间、日期、经纬度、最大范围d、导航测试系统分辨率l,计算以该地理位置点为中心,纬度值不变,经度值以最大范围δ/250度为步长,经度方向向东向西各取250个点的导航参考角Sn,如图5所示。

图5 取点分布
统计500个点中导航参考角同中心点导航角S1差值小于导航测试系统分辨率l的点的个数N,由下式可得中心点处经度分辨率T:
初始设置最大范围δ=0.25,步长为(δ/250)°,因此初始经纬度分辨率的最小值为0.001°。若初始步长过小,系统时间复杂率较高,若初试步长较大,或初试最大范围δ过大,计算所得经纬度分辨率精度过低,综合考虑设置该初试值。若初始设置最大范围δ过小,可能存在某一半取点的导航参考角值同中心点导航角差值均在导航测试系统分辨率0.1°范围以内,此时不能保证所计算的纬度分辨率为真实分辨率,故需提前计算纬度值增加/减少最大范围δ处纬度的导航参考角,若任一导航参考角同中心点处导航参考角差值小于导航测试系统分辨率λ,则最大范围δ增加1倍。
根据经纬度分辨率计算流程图,搭建了天空偏振光空间分辨率仿真平台,如图6所示,该仿真平台可以计算任意日期、时间、经纬度地区的偏振导航测试系统的经度分辨率和纬度分辨率。
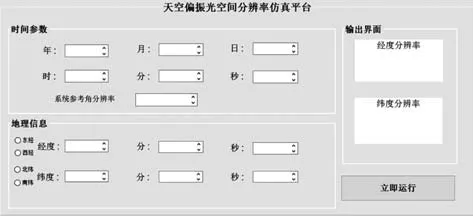
图6 天空偏振光空间分辨率仿真平台
2 仿真结果与分析
为了探究偏振导航测试系统空间分辨率分布规律,利用天空偏振光空间分辨率仿真平台,分别计算了半球区域偏振导航测试系统的经度分辨率和纬度分辨率,综合两者分布情况,得出偏振导航测试系统空间域误差大小。
2.1 纬度分辨率分析
以2022年3月20日(春分日)北京时间12时作为时刻基准,此时太阳的直射点在0°纬线和东经120°交汇处。以该直射点为中心点,分别向东、向西每隔15°经度(一个时区)取一个经度值;分别向北、向南每隔10°纬度取一个纬度值,组成11×17个网状地理位置分布点。如图7所示,中心红色圆点为此刻太阳直射点。假设此时偏振导航测试系统仪器分辨率为0.1°。分别计算各地理位置点纬度分辨率。
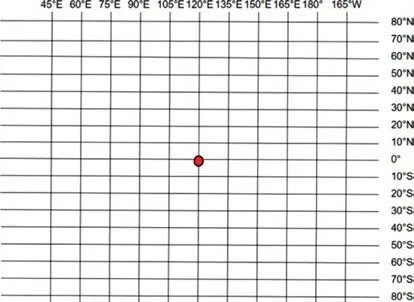
图7 地理位置取样数据网状分布
以纬度作为X轴,纬度分辨率为Y轴,绘制不同经度条件下,纬度分辨率随纬度变化情况,如图8所示。由图可知,同一经度条件下,太阳直射点所在纬度即0°纬度的纬度分辨率最小,向高纬度方向逐渐增大。同时,太阳直射点所在经度线即此时的东经120°经度线上,增速明显高于非太阳直射点所在经线。
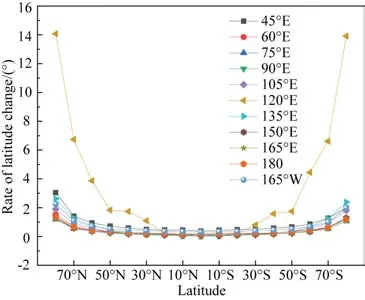
图8 各经度条件下纬度分辨率随纬度变化情况
为了定量分析纬度分辨率的分布情况,分别绘制直射点经度、与非直射点经度线上,纬度分辨率随纬度变化情况图。如图9(a)所示,太阳直射点所在经度线,0°~20°纬度区域,纬度分辨率变化较缓,纬度分辨率在0°~0.2°;20°~50°纬度区域,纬度分辨率变化较为明显,纬度分辨率在0.2°~2°;50°以上纬度区域,纬度分辨率变化非常明显,纬度分辨率在2°以上。
由图9(b)可得,60°E~105°E经度线上,0°~20°纬度区域,纬度分辨率变化区间在0°~0.2°;20°~50°纬度区域,纬度分辨率变化区间在0.15°~0.4°;50°以上纬度区域,纬度分辨率变化区间在0.3°~1°。75°经度线上,0°~20°纬度区域,纬度分辨率变化区间在0.25°~0.5°;30°~50°纬度区域,0.5°~0.75°;50°以上纬度区域,变化区间在0.75°~1.5°。

图9 纬度分辨率随纬度变化情况
2.2 经度分辨率分析
同纬度分辨率分析一致,以2022年3月20日(春分日)北京时间12时作为时刻基准,取11×17个呈网状分布的经纬度地理位置,分别计算各地理位置点经度分辨率。并假设此时偏振导航测试系统仪器分辨率为0.1°。
分别绘制直射点纬度线与非直射点纬度线经度分辨率随经度变化情况如图10所示。由图可得,随着经度值向远离直射点两端偏移,经度分辨率逐渐增大,且越靠近太阳直射点所在纬线上,经度分辨率增大的速率越快。由图10(a)可得,太阳直射点所在纬度线,105°E~120°E经度区域,经度分辨率变化不太明显,经度分辨率分布在0°~2°;45°E~105°E经度区域,经度分辨率变化十分明显,经度分辨率分布在2°以上。由图10(b)可得,30°及以上纬度区域,经度分辨率变化区间在0°~0.2°;20°纬度线上,经度分辨率变化区间在0°~0.3°;10°纬度线上,经度分辨率变化区间在0°~0.6°。

图10 经度分辨率随经度变化情况
2.3 综合分析
综合以上结论,绘制当前时间,全半球范围内纬度分辨率分布表,如表1所示,首列首行分别为经纬度偏离太阳直射点纬度、经度值,同一经度线上,随着纬度取值偏离直射点纬度,纬度分辨率单调递增。
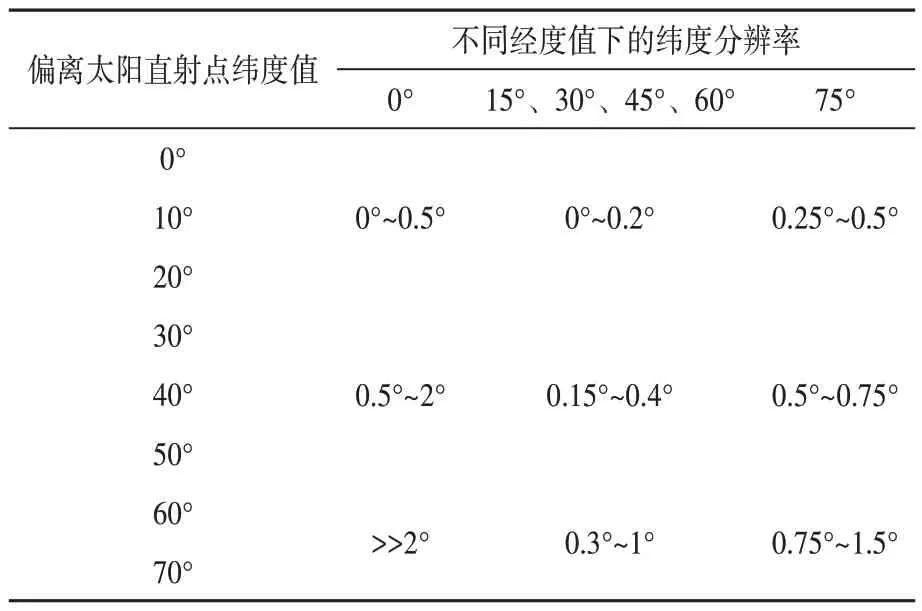
表1 纬度分辨率分布
综合以上结论,绘制当前时间全半球范围内经度分辨率分布表如表2所示,且同一纬度线上,经度分辨率随经度值增大单调递增;同一经度线上,经度变化0°~15°区域,经度分辨率随纬度值增大单调递增,经度变化30°以上区域,经度分辨率随纬度值增大单调递减。
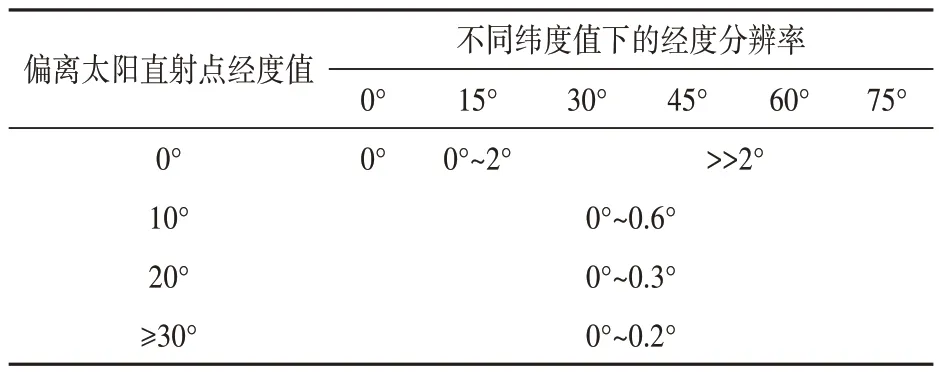
表2 经度分辨率分布
综合表1、表2可得,太阳直射点所在纬度线上,随着经度取值逐渐偏离直射点经度,纬度分辨率变化范围在0°~0.5°,经度分辨率由0°快速增加到远大于2°,纬度分辨率远小于经度分辨率;太阳直射点所在经度线上,随着纬度值逐渐偏离直射点,纬度分辨率由0°快速增加到远大于2°,经度分辨率变化范围在0°~0.1°,经度分辨率远小于纬度分辨率。
非直射点经纬度线,纬度值偏离直射点10°~20°纬度范围,经度分辨率变化范围在0°~0.6°,纬度分辨率在0°~0.5°,经度分辨率、纬度分辨率相差不大;纬度值偏离直射点30°~50°纬度范围,经度分辨率变化范围在0°~0.2°,纬度分辨率变化范围在0.15°~0.75°,经度分辨率小于纬度分辨率;偏离直射点50°以上纬度范围,经度分辨率变化范围在0°~0.2°,纬度分辨率在0.3°~1.5°,经度分辨率远小于纬度分辨率用。
3 结束语
本文通过引入经纬度分辨率这一参考量,描绘偏振导航测试系统空间域误差大小,通过控制变量法分别从经度方向、纬度方向探究偏振导航测试系统空间分辨率分布规律。结果表明:太阳直射点所在纬度线上,偏振导航测试系统纬度分辨率远小于经度分辨率,偏振导航测试系统受纬度波动影响较大;太阳直射点所在经度线上,经度分辨率远小于纬度分辨率,测试系统受经度波动影响较大。非直射点经纬度线,纬度值偏离直射点10°~20°纬度范围,经纬度分辨率值比较接近,测试系统受经纬度波动影响相差不大;纬度值偏离直射点30°~50°纬度范围,经度分辨率小于纬度分辨率,测试系统受经度波动大于受纬度波动影响;偏离直射点50°以上纬度范围,经度分辨率远小于纬度分辨率,测试系统受经度波动影响远大于受纬度波动影响。
