基于多源数据融合的复杂区域文物三维重建应用
2023-02-23黄北生王云凯
黄北生 王云凯
(江苏省地质测绘院, 江苏 南京 211102)
0 引言
文物作为人类历史文化遗产,是人类创造的且不可重新创造的人类社会活动的遗物、遗迹[1]。随着时间的推移,许多处于室外的文物受到了自然侵蚀或人为破坏[2]。文物数字化数据作为文物存档重要的基础数据,在文物的管理和修缮中有着重要的支撑作用[3]。传统的利用全站仪、测距仪等文物数字化方法,虽然能够精确地测量文物图件数据,但也存在着工作量大、文物表面细化程度不够、复杂区域采集困难等问题。
随着科技的发展,新的技术如倾斜摄影、贴近摄影测量、三维点云等技术被应用到文物数字化工作中。文献[4]通过制定不同的数据采集方案,将倾斜摄影测量应用到了古桥、古村落数据采集的中;文献[5]将贴近摄影测量技术应用到岩画的高精度、三维数字化工作;文献[6]基于点云数据实现了文物复杂表面的高精度表达。然而,各种新技术也有其一定的局限性,倾斜摄影在复杂区域或带檐文物数据采集时,往往存在视角盲区,导致模型出现拉花、扭曲等现象[7-8];贴近摄影测量具有航线规划复杂、飞行操控要求较高等问题;三维点云技术存在着文物上部点云获取困难、无纹理信息等问题[9]。
本文以南京市栖霞寺舍利塔为例,提出一种结合倾斜摄影、贴近摄影测量和地面三维点云的多源数据复杂区域文物三维模型建设方法。该方法以倾斜摄影为控制基础,结合贴近摄影测量和地面三维点云数据融合处理,以得到更为精细、美观的文物三维模型。
1 多源数据融合及关键技术
1.1 多源数据融合技术
多源数据融合是起源于军事应用角度的一种数据处理技术[10]。该技术通过多角度、多层次的处理过程,运用多源数据检测、关联、组合等操作,实现状态判断、身份辨识、态势评估等高精度评价。多源数据的融合过程主要包括多传感数据获取、数据预处理、特征提取、融合计算、融合数据输出等过程[11]。数据融合层次分为数据级融合、决策级融合和特征级融合[12-13]。本文采用倾斜摄影、贴近摄影测量和地面三维点云数据融合,依据各融合层次分类特点,采用数据级融合的方式进行,数据级融合流程见图1。
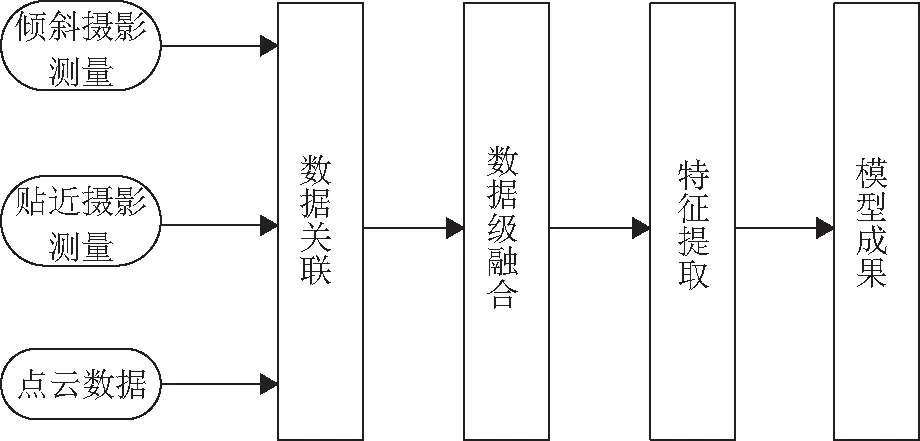
图1 数据级融合流程
1.2 多源数据三维建模关键技术
基于1.1 的分析,基于多源数据融合的三维模型建设主要包括数据采集、数据预处理、空间融合、数据信息融合、成果输出等。其中数据预处理是对各单一数据源进行的常规数据处理,为数据融合做准备;空间融合是对各数据源进行统一的空间配准,形成位置信息的融合;数据信息融合是对空间融合后的数据进行建模,生成完整的、精细的三维模型。
1.2.1 空间融合
多源数据空间融合最主要的方法是将各数据进行坐标系的统一[14]。本文涉及的坐标系统一包括倾斜摄影与贴近摄影测量的坐标统一和摄影测量与点云数据坐标系统一两个方面。
相对于倾斜摄影测量贴近摄影测量主要具有沿被摄物体的表面进行数据采集和相机角度随物体表面调整的特点[15]。因此,为保证倾斜摄影和贴近摄影测量能够进行坐标系的统一,本文从两个方面进行设计:
(1)统一数据采集系统。选用带有云台的摄影相机为影像数据采集设备,数据采集具有相同的相机、相同的全球导航卫星系统(global navigation satellite system,GNSS)接收设备、相同的惯性测量单元(inertial measurement unit,IMU)设备和相同的数据采集坐标系。
(2)像控点布设。通过在采集区域布设像控点的方式,实现两者在进行建模时的统一。

(1)


式中,R为旋转矩阵;T为平移矩阵;α、β、γ为各旋转轴旋转角。
1.2.2 信息融合
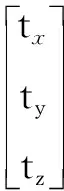
基于多源数据的信息融合如图2所示。
图2 多源数据信息融合
首先对倾斜摄影、贴近摄影和地面三维点云数据进行初步处理,分别得到影像数据和点云数据。其中,倾斜摄影与贴近摄影通过控制点进行融合空三计算,进一步得到密集点云。地面三维原始点云通过预处理,并结合控制点进行点云配准。然后,将配准后的点云数据进行去噪、裁切等得到融合区域点云。将生成的密集点云与地面三维点云数据进行精配准,得到融合后的点云数据,然后进行不规则三角网(triangulated irregular network,TIN)的构建、纹理映射和三维重建。
2 应用实例
2.1 环境概况
栖霞寺舍利塔位于南京市栖霞山中峰西麓栖霞禅寺东,是中国最大的舍利塔,该石塔为五代南唐(937—975年)重建。舍利塔为密檐式,五级八面,自下而上分为塔座、塔身和塔刹3部分,通高18 m。该塔周围环境较为复杂,北面临近高约12 m的建筑;东面为山体,带有较高树木;西侧为院门;南面较为开阔,但临近树木枝叶较为繁茂[16]。同时,该区域游客络绎不绝,较狭窄范围内聚集了大量人员,不利于数据的采集。舍利塔周围环境见图3。

图3 舍利塔环境图
2.2 倾斜摄影采集
本文倾斜摄影测量既作为舍利塔上部信息采集数据,也兼有区域控制的作用。本文采用大疆精灵4实时动态载波相位差分技术(real time kinematic,RTK)无人机进行倾斜摄影测量的数据采集。采用“#”字型飞行设计,航向重叠度和旁向重叠度都设置为80%,基于周围环境因素,云台倾角设置为“-60°”,航摄高度为50 m。倾斜摄影航线如图4所示。
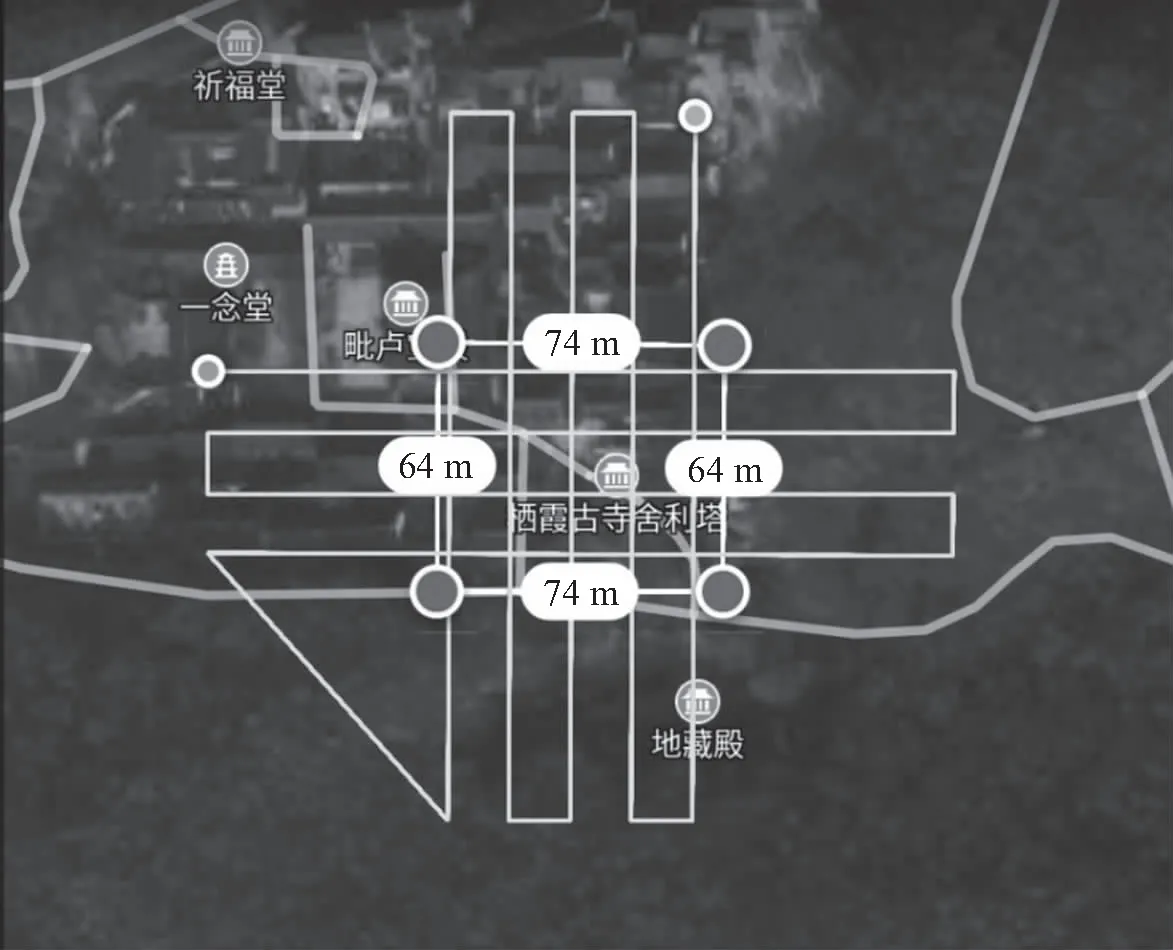
图4 倾斜摄影航线
2.3 贴近摄影测量
由于环境限制,此次贴近摄影测量无法采用环形航线规划的形式进行。因此,本文贴近摄影测量采用手动控制无人机进行拍摄的方式进行。为保证飞行安全,将飞行自上而下分为两个部分进行。数据采集上半部分,定位系统信号影响较弱,且对地面人员安全影响较小,数据采集沿着舍利塔八个角从上到下每隔1 m拍摄照片,拍摄角度分别为30°、15°、0°、-15°、-30°或者根据实际情况更改拍摄角度。数据采集下半部分,既要考虑信号影响,又要注意人员安全,因此,数据采集沿着舍利塔八个角从上到下每隔2 m拍摄照片,拍摄角度分别为30°、15°、0°、-15°、-30°或者根据实际情况更改拍摄角度。同时,依据部分可能出现漏洞的地方进行了补拍。贴近摄影测量数据采集见图5。

图5 贴近摄影测量
2.4 三维点云数据采集
本文三维点云数据采集采用徕卡RTC360 LT扫描仪,该设备采用波形数字化技术(wave form digitizer,WFD),扫描范围0.5~130 m,扫描速率100万点/s。同时,在舍利塔周围布设了8个控制点,即为点云拼接的公共点,也是多源数据融合的控制点。
3 模型建设结果与分析
3.1 单一数据源模型效果分析
基于倾斜摄影技术进行模型建设,对舍利塔顶部构造表达较好。但对于舍利塔底部构造和雕刻分辨率较低,同时对于舍利塔檐下细节无法进行模型建设,出现檐下扭曲变形等现象。
贴近摄影测量能够获取分辨率较高的舍利塔侧面和檐下构造纹理信息。但由于数据采集环境的限制,导致部分区域照片重叠度不够,模型部分细节纹理信息较弱、模型有粘连现象。
点云数据采集中,由于数据采集方式的限制和舍利塔本身结构的遮挡,导致舍利塔部分区域无法采集到点云数据,出现模型空洞。
3.2 多源数据融合的精细化模型建设
本文采用Contextcaptur软件进行多源融合的精细化模型建设任务。首先将采集的倾斜摄影照片和贴近摄影测量照片通过控制点进行融合空三技术得到密集点云,然后导入地面点云数据,通过构建和优化TIN网,进而生产三维模型白模和进行纹理映射,得到多源融合的精细三维模型。
3.3 模型效果对比分析
为对比分析多源融合精细化模型的效果, 本文从模型完整性、檐下模型、模型空洞、模型纹理细节等方面进行对比,模型完整性对比如图6~图9所示。

(a)倾斜模型

(a)倾斜模型

(a)倾斜模型

(a)倾斜模型
由以上对比可知,多源融合精细化模型能够完整地建设出舍利塔完整的模型,对于檐下扭曲变形、模型粘连、模型空洞等问题也能很好地解决,同时该方法能够更好地表达文物纹理信息。
4 结束语
本文采用了基于倾斜摄影数据、贴近摄影测量数据和地面三维点云数据的空地多源数据融合精细建模技术进行复杂区域文物三维模型建设。试验结果表明,多源融合精细化模型可有效解决单一数据源模型存在的扭曲变形、模型粘连、模型空洞等问题,同时能够更为精细地表达文物表面纹理,能够为文物数字化提供更为详细的数据。
