响应形变液晶高分子的取向方法和功能开发
2023-02-22范扬扬吕久安
范扬扬,吕久安
(西湖大学 工学院,浙江 杭州 310024)
1 引言
液晶高分子(Liquid crystal polymers,LCPs)是一类将液晶分子通过化学键的形式键合在高分子网络中的高分子材料。在将液晶基元排列取向后,可以实现在光[1-3]、热[4-5]、电场[6-8]的刺激下产生可逆的形变。这种刺激响应的特性使其在仿生软机器人、微流控、柔性执行器、光能收集等领域有巨大的潜在应用。
1969 年,De Gennes 预测液晶高分子是开发人工肌肉的良好材料[9]。Finkelmann 在1981 年首次报道了一种基于聚硅氧烷主链的液晶高分子材料,将液晶分子键合在以聚硅氧烷为主链的骨架中,并利用外力拉伸的方法对液晶基元取向,实现当温度升高到相转变温度时发生收缩,降温后恢复原状[10]。在此后的半个多世纪里,液晶高分子领域发展迅速,涌现出非常多的研究成果。总的来说,人们研究重点还是在液晶高分子的化学组成,取向技术和探索潜在的应用上。
本文回顾了液晶高分子的取向方法以及基于液晶高分子开发的各种各样的功能材料。我们将现在所使用的取向技术按照液晶单体开始交联前后取向分为一步法和两步法,科研人员可以根据实验材料的物理性质、器件的形态、取向要求选择合适的取向技术。我们列举了液晶高分子在仿生软机器人、微流控和柔性执行器领域的典型应用。液晶高分子具有刺激响应、模量可调、应变量大、便于加工等特性,在上述的领域都有替代传统材料的潜力。例如,在微流控领域,传统的基于气动、电浸润和磁颗粒掺杂的方法存在外围设备巨大、电解和污染样品等问题。基于液晶高分子的微流控技术在现有阶段实现了对于液体的运输、分离、混合、搅拌和对于固体颗粒的运输,对管道内的液体流量可以远程控制。由于这种基于不对称毛细力的液体运输方法对液体产生的影响最小,同时光控的方案具有远程操控、简单和可图案化控制的特点,在未来可能开发出集成度更高,具有并行处理液体能力的微流控平台。
2 液晶高分子的取向方法
液晶高分子可以在外界的刺激作用下发生形态上变化的原因是高分子网络中的液晶基元存在着有序的排列,这种有序性被定义为“有序参数(S)”。当外界的刺激作用在材料上时,液晶的有序性下降,高分子聚合物网络中的链段构象发生变化,在宏观上可以表现为弯曲,扭曲,收缩或膨胀等形态的变化。
在液晶高分子的制备过程中,一个重要的步骤就是液晶基元的取向。随着人们研究的进展,开发了多种液晶高分子的取向手段,我们将其按照合成时的步骤分为两大类,分别是一步法取向和两步法取向。
2.1 一步法取向
一步法是指反应物中的液晶分子在交联之前已经通过外场的感应作用或表面诱导效应等小分子液晶取向技术排列成有序相,然后通过化学反应键合在一起。
2.1.1 外场感应取向
2.1.1.1 磁场诱导作用
大部分的反应性液晶分子都有多苯环的结构,所以分子具有较强的各向异性抗磁性,使得其长轴倾向于平行外加磁场的方向排列[11-12]。
1991 年,C.H.Legge 等人使用磁场将聚合前的液晶分子取向,合成了单畴的侧链型液晶高分子薄膜,在热刺激下,其有序参数下降,在冷却后又恢复原状[13]。如图1(a)所示,Patrick Keller 等人将反应原料灌注到聚二甲基硅氧烷(PDMS)软模具中,在下方钕铁硼永磁体(约1 T)的磁场环境下,加热到85 ℃的各向同性相,然后以0.5 ℃/min 降温到70 ℃到达向列相,利用紫外灯引发硫醇-烯Michael 加成反应,最后合成形变量约300%~400%的微米尺寸的微执行器[14]。

图1 磁场诱导取向。(a)磁场取向的装置图[14];(b)组合的磁场下取向示意图[15]。Fig.1 Schematic of magnetic field-assisted alignment.(a)Device schematic of magnetic field-assisted alignment[14];(b)Schematic of combined magnetic field-assisted alignment[15].
在最近的研究中,Joanna Aizenberg 等人利用组合的磁场产生图案化的磁场分布(图1(b))制备了不同取向方向的液晶高分子执行器,在加热到各向同性相温度时,实现了扭曲、平面内和平面外倾斜、收缩或者伸长的形态变化[15]。
2.1.1.2 电场诱导作用
在液晶分子结构中引入极性官能团,例如酯基、腈基或卤素,可以使液晶分子在电场诱导下取向。对于正介电各向异性的液晶,例如以腈基为端基的单官能团液晶单体,由于其长轴方向的介电常数大于短轴,其长轴将平行于电场方向排列;对于负介电各向异性的液晶,例如以二丙烯酸酯为端基的双官能团液晶单体,由于其长轴方向的介电常数小于短轴,其长轴将垂直于电场方向排列。如图2(a)所示,其基本实验操作是在液晶盒中使用电场进行取向,然后利用光引发聚合反应固定取向结构[16]。

图2 电场诱导取向。(a)电场取向的基本操作流程[16];(b)图案化取向后的液晶高分子形变示意图[20]。Fig.2 Schematic of electric field-assisted alignment.(a)Basic operation process of electric field-assisted alignment[16];(b)Schematic of the deformation of the liquid crystal polymer after patterned orientation[20].
通过电场诱导的方法,已经制备出了平行或垂直于薄膜表面取向的液晶高分子[16-19]。不同于磁场的产生方式,电极的图案化可以简单地改变电场分布。如图2(b)所示,Dirk J.Broer 等人通过在具有条纹图案的ITO 电极的液晶盒中施加电场取向制备了平行和垂直取向交替出现的液晶高分子薄膜[20]。但是基于此方法制备的液晶高分子的形态通常为膜,且厚度受限制。
2.1.1.3 光诱导作用
光诱导取向的方法最早使用在液晶显示器领域[21]。在已有的研究中,开发出了例如偶氮苯染料和肉桂酸盐等可以在线偏光下规则排列的分子[22-23]。其制备的一般过程是将具有线偏振性质的原料和光引发剂灌注到液晶盒中,例如被广泛研究的具有偶氮苯结构的液晶分子,可以在线偏振的蓝光照射下规则排列[24]。
值得注意的是,由于光可以方便地图案化并且空间精度高,所以基于此方法的取向技术具有高分辨率的特点[25-26],同时可以实现同一区域不同位置取向方向的不同。如图3 所示,Timothy J.White 等人利用激光光栅作为图案化的方法开发出了存在多个沿圆周方向取向的液晶高分子薄膜,其中每一个有序的取向单元体积仅为0.000 5 mm3,这样在升高温度达到相转变温度时,薄膜从二维的平面变成具有阵列状突起的三维结构[27],实现了高度方向上超过100 倍的变化。
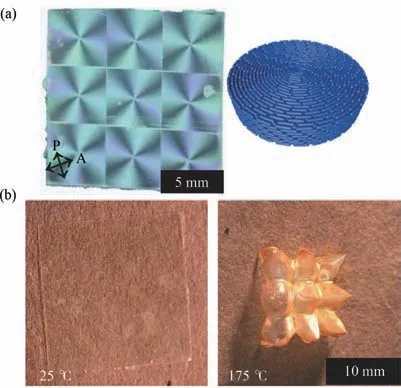
图3 体素化的液晶高分子[27]。(a)液晶高分子膜的偏光照片;(b)液晶高分子膜在不同温度下的形态照片。Fig.3 Voxelated liquid crystal elastomers[27].(a)Polarized photos of the liquid crystal polymer film;(b)Mor‐phological photos of the liquid crystal polymer film at different temperatures.
在最近的研究中,一些其他光图案化的方法也被引入到液晶高分子的取向研究中,例如基于数字微反射镜(DMD)的空间光调制系统[25]、等离子体掩膜技术[26]等。
2.1.2 表面诱导作用取向
当液晶分子与某些材料表面接触时,由于受到表面的作用力而被诱导排列。这种诱导的原因主要是以下两个方面:一是液晶分子和取向层(通常使用的有聚酰亚胺[28]、环氧树脂[29]等)之间存在分子间作用力,使得液晶分子锚定在液晶盒两侧表面。二是这些取向层通常设计成微米或者纳米尺度的沟槽[30],结合表面锚泊作用,使得液晶分子的长轴方向被限域在沿沟槽的方向。通过改变液晶盒上下玻璃表面的沟槽方向的排列和引入垂直取向层,可以实现平行或垂直于薄膜、扭曲取向的液晶高分子[31]。
但是,受限于这种表面的作用力的范围(作用有效尺度~50 μm)[32],这种取向方式只能制备厚度较小的取向液晶高分子膜。
2.1.2.1 摩擦法制备表面诱导模板
在制作具有微纳尺度的沟槽时,最简单的方法是摩擦法。通过在液晶盒内侧的玻璃片上涂覆上聚酰亚胺层,通过布等摩擦表面可以产生细小的沟槽[33]。Banahalli R.Ratna 等人通过将85 ℃的反应性液晶原料填充在液晶盒中,然后加热到95 ℃,并在1 ℃/min的速率下降温到向列相。在降温的过程中,逐步实现液晶分子长轴沿沟槽方向取向,最后在氮气保护下光引发聚合成高分子膜[34]。
随着原子力显微镜的发展,使用原子力显微镜在取向层表面摩擦可以产生更加复杂的沟槽图案。Charles Rosenblatt 等人利用这项技术,合成了具有复杂取向的液晶高分子薄膜[35]。
2.1.2.2 光刻法制备表面诱导模板
通过光刻技术可以使用光自由地设计沟槽形貌。表面诱导模板的一般制备过程是用图案化的紫外光照射在旋涂有负性光刻胶SU-8 的玻璃片上,被照射区域的光刻胶固化,未照射的区域通过溶液清洗去除,这样就在玻璃表面留下了图案化的沟槽[29]。基于此方法可以设计高分辨率的沟槽形貌。光刻法为复杂取向提供了强有力的取向基板加工方法。
Shu Yang 等人通过对图案化取向的液晶高分子膜在受到热刺激后产生2D 到3D 变换过程进行逆向设计。如图4(a)、(b)所示,先通过计算机设计液晶分子的取向结构,然后设计对应的图案化掩膜,进一步依此制作图案化的沟槽,并通过图案化结构的液晶盒合成了复杂取向的液晶高分子膜[36]。如图4(c)所示,在对液晶高分子内部取向进行图案化后,可以实现液晶高分子从2D 的平面膜转变为3D 人脸轮廓。这种逆向设计的手段实现了对局部变形的精确控制,对于未来探索柔性电子、航空航天、医疗设备等都有潜在的指导意义。

图4 光刻法制备表面诱导模板[36]。(a)光刻法制备的基本流程;(b)微通道的光学显微镜图像;(c)液晶高分子膜二维到三维转变。Fig.4 Schematic of alignment templates prepared by photolithography[36].(a)Basic operation process of prepared process;(b)Optical microscope image of channels patterned;(c)Schematic of the 2D to 3D transformation in LCPs membrane.
2.2 两步法取向
在液晶高分子的制备组装过程中,如果不做任何取向处理,最终合成的液晶高分子为多畴排列,液晶分子为杂乱无章的状态。两步法通常先将液晶单体混合物交联反应形成弱交联的多畴液晶低聚物,然后对其施加例如拉应力[37]、压应力[38]或者剪切应力[39]引导内部的液晶分子排列,最后等待交联完全[38]或使用紫外光引发[40]来固定液晶取向结构。
2.2.1 机械应力拉伸取向
机械应力拉伸取向因其操作简单,取向效果好而被广泛使用。拉应力诱导取向的方法最早由Finkelmann 等提出[37],如图5(a)所示。在实验中,作者将聚(氢硅氧烷)链、具有单乙烯基官能团的液晶分子、多官能团乙烯基液晶分子和铂催化剂混合在一起。由于不同官能团在反应上的动力学的差异,反应速率不同。在第一步中,通过铂催化将液晶基元的乙烯基键合到聚硅氧烷主链上,得到弱交联的聚合物。在第二步中,通过外力单轴拉伸完成剩下的交联过程,固定液晶基元的位置得到最后的高分子网络。在后续的发展中,为了加速材料制备的速度,研究人员改变了原料体系,并在反应物中加入光引发剂,在第二阶段可以使用光引发的方式快速固定单轴拉伸后的取向状态(图5(c))[40-41]。同时,如图5(b)所示,多轴的拉伸应力可以赋予液晶高分子更加丰富的取向结构[41]。此外,利用例如冲压[4,38]、卷边和压花[42]等多种应力耦合的取向方法(图5(d)),可以极大地拓展液晶高分子的取向结构。
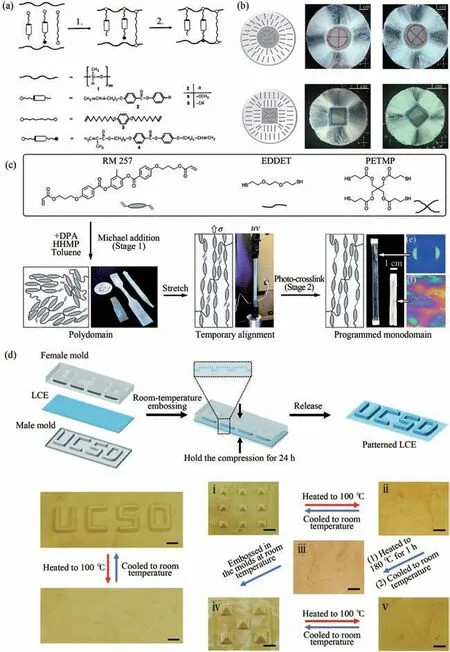
图5 机械应力拉伸取向。(a)两步法制备聚硅氧烷类液晶高分子[37];(b)多轴拉伸取向[41];(c)光引发交联固定取向状态[40];(d)冲压法取向[4]。Fig.5 Schematic of mechanical alignment.(a)Two-step preparation of polysiloxane-based liquid crystal polymers[37];(b)Schematic of multiaxial stretching alignment[41];(c)Schematic of photo-induced cross-linking to fix the align‐ment state[40];(d)Schematic of stamping alignment[4].
2.2.2 流变取向
利用反应物具有流动性的特征,将其从针头中打印出来,由于从打印针头处挤出时受到剪切应力和拉伸应力,液晶分子将沿着打印方向取向[39,43]。
如图6(a)所示,André R.Studart 和Theo A.Tervoort 等人利用熔融原料挤出的方法打印出了高度取向的液晶高分子材料,并且由于3D 打印本身的优势,可以制备出分层结构、复杂的几何形状[44]。

图6 流变取向。(a)3D 打印液晶高分子示意图[44];(b)数字光处理技术加工液晶高分子[45]。Fig.6 Schematic of rheological alignment.(a)Schematic of 3D-print to fabricate LCPs[44];(b)Schematic of DLP technology to fabricate LCPs[45].
近期,Robert F.Shepherd 等结合流变剪切力和基于数字光处理(DLP)的增材制造方法,提高了加工的精度和速度,并制备了高度取向的液晶高分子膜,实现了高能量密度的柔性执行器(图6(b))[45]。
3 液晶高分子的功能开发
液晶高分子具有刺激响应的性能,可以在例如光、热和电场的作用下改变形状,并且具有大的可逆形状变化,使其在部分应用场景成为可以替代介电弹性体、水凝胶等的软执行器材料。
3.1 仿生软机器人
自然界中的毛虫、尺蠖、蚯蚓等昆虫可以通过自身的变形在复杂的地形中运动。其表现的例如爬行[46]、滚动[47]、跳跃的运动形式启发科研人员开发了具有类似运动行为的仿生软机器人。
最常见的仿生软机器人是毛虫和尺蠖。Piotr Wasylczyk 等人将染料掺杂在具有图案化液晶分子排列的液晶高分子中,制备了具有自然尺寸的单片柔性机器人[48]。如图7(a)所示,通过连续的激光扫描,引起机器人局部的收缩,导致被照射区域温度升高,从而产生局部的卷曲变形,其结果是使软机器人沿着激光扫描的方向运动。并且这种机器人有良好的运动性能,可以沿着11°的坡度爬行,并且可以穿越狭缝。
最近,Arri Priimagi 等人设计了基于液晶高分子的毫米级的光控步进机器人[49]。如图7(b)所示,这种软机器人不再需要复杂的控制系统,可以在均匀的可见光照射下在不同材质的基板上进行运动。他们通过将机器人设计成“Ω”型,在可见光照射下,由于光热效应,温度升高,液晶高分子膜形状改变,由弯曲状态变为平整状态,使得整个条带在长度方向上延伸。当关闭光源时,条带恢复原状。通过交替的照射,机器人可以反复变形,模仿毛虫的运动。
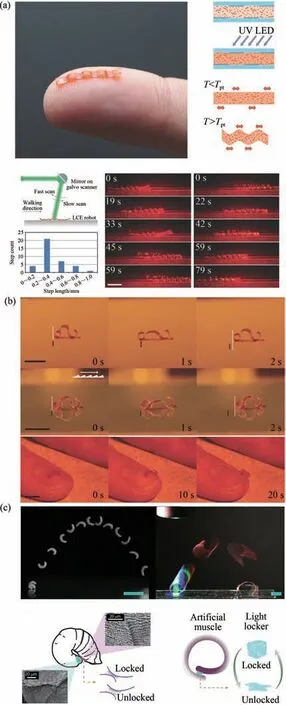
图7 仿生软机器人。(a)仿生软机器人在连续激光扫描下运动[48];(b)“Ω”型仿生软机器人在可见光照射下运动[49];(c)弹跳机器人在光照刺激下弹跳[50]。Fig.7 Schematic of bionic soft robots.(a)Schematic of mo‐tion of bio-soft-robot under continuous laser scan‐ning[48];(b)Schematic of“Ω”-shaped bio-soft-robot moves under visible light irradiation[49];(c)Schematic of bouncing robot bounces under light stimuli[50].
昆虫的运动除了爬行,为了适应环境,还进化出了跳跃的能力。Arri Priimagi 和Hao Zeng等人模仿Asphondylia 幼虫长距离弹跳的能力,开发了可以光学控制的液晶高分子弹跳执行器[50]。如图7(c)所示,作者利用弯曲的液晶高分子薄膜作为人工肌肉,通过蓝光照射使得温度升高,从而产生弹性势能的存储。然后在绿光的照射下,粘合剂失去粘性,释放能量并推动条带弹跳。由于粘合剂在绿光关闭后可以恢复粘性,此弹跳机器人可以实现多次的弹跳。
相比于传统的机器人,由于液晶高分子材料具有柔性和刺激响应的特性,使其可以在简单的控制信号下执行高自由度的运动,实现在不同材质、不同地形下的运动。同时驱动仿生软机器人的刺激通常是外部的热源或者光,自身不需要携带能源储存的装置,因此其尺寸可以远小于传统机器人。
3.2 微流控
微流控被认为是生物医学和化学应用的平台,基于此搭建的芯片实验室(Lab on chip)可以对微量的液体和颗粒进行精确的操控,相比于传统的方式可以减少试剂的使用体积,具有快速处理、低成本、高度自动化等特点[51-52]。得益于这些优点,微流控被广泛地研究。但是随着研究的进展,微流控的外部控制设备越来越复杂,成为此领域的瓶颈[53]。现在亟待开发新的驱动液体的方式来简化微流控系统。
在微流控系统中,通常使用压力例如气压或者液压作为驱动阀门的动力[54]。但是这样就增加了外围控制设备和微流控芯片连接的复杂性。如图8(a)所示,Antoni Sánchez-Ferrer 等人第一次将液晶高分子作为微阀门引入到微流控系统中[55]。在此项研究中,其驱动原理是液晶高分子在温度升高时发生变形,其中间产生弹性屈曲,这种变形使得微腔内的阀门封闭。
除了微阀门之外,微量液体的运输也是微流控领域重要的研究方向。受仿生动脉血管的层状结构的启发,研究人员开发出新型线型液晶高分子(linear liquid crystal polymer,LLCP)并制备出管状的微执行器[56]。如图8(b)所示,在梯度的470 nm 光的照射液体所在的微管执行器时,在光照强度大的地方管径变大,从而导致液滴两侧的管径大小的不同,诱导产生轴向毛细力,在拉普拉斯压差的推动下实现液体的光控驱动。通过改变光照条件,可以实现微量液体的混合、搅拌、物体转运的功能。在此项工作中,实现了最高5.9 mm/s 的运动速度。并且通过不同的毛细管模板制备了S 形和螺旋形的微管执行器实现了17°坡度的克服重力传输,Y 形微管执行器实现了光控液体的混合。
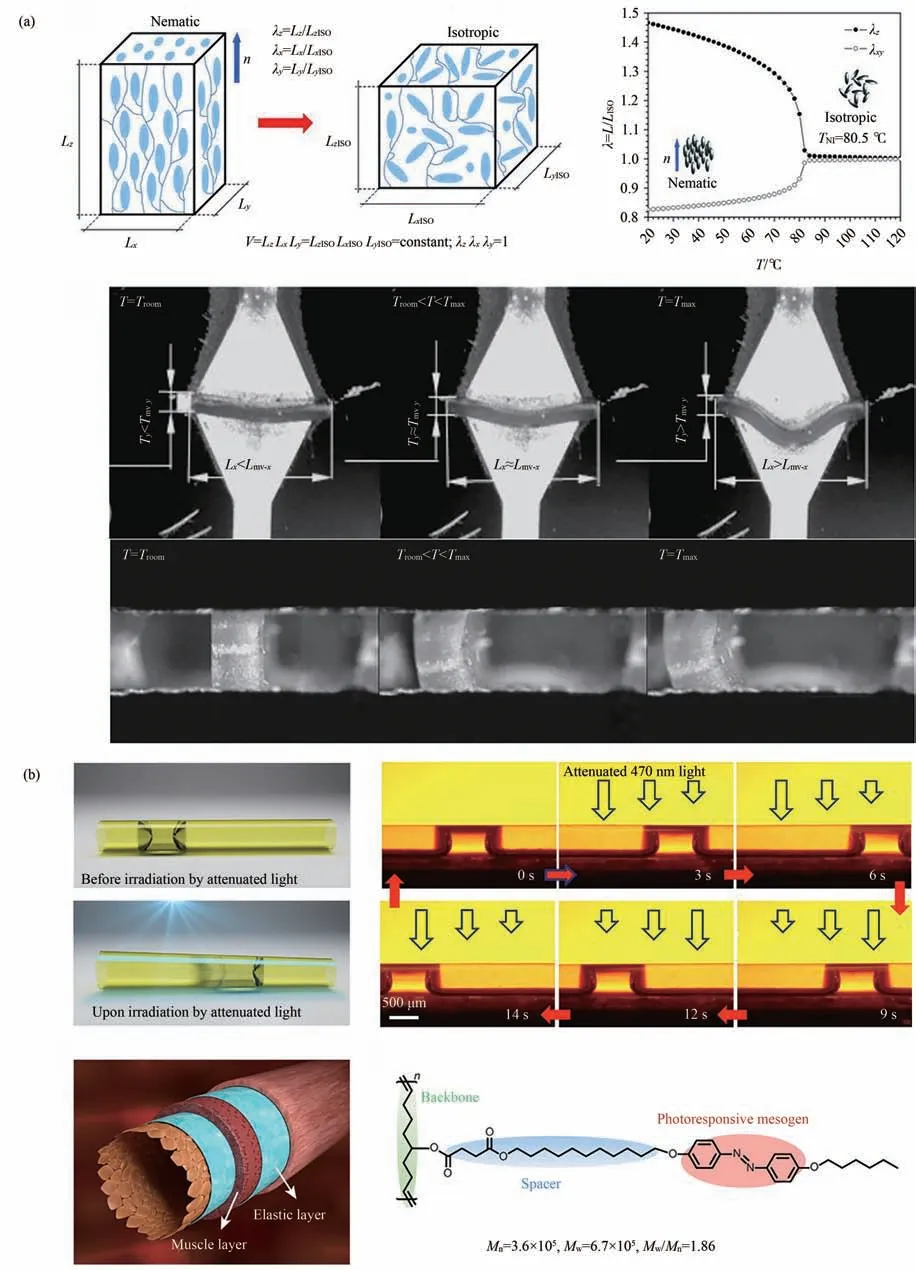
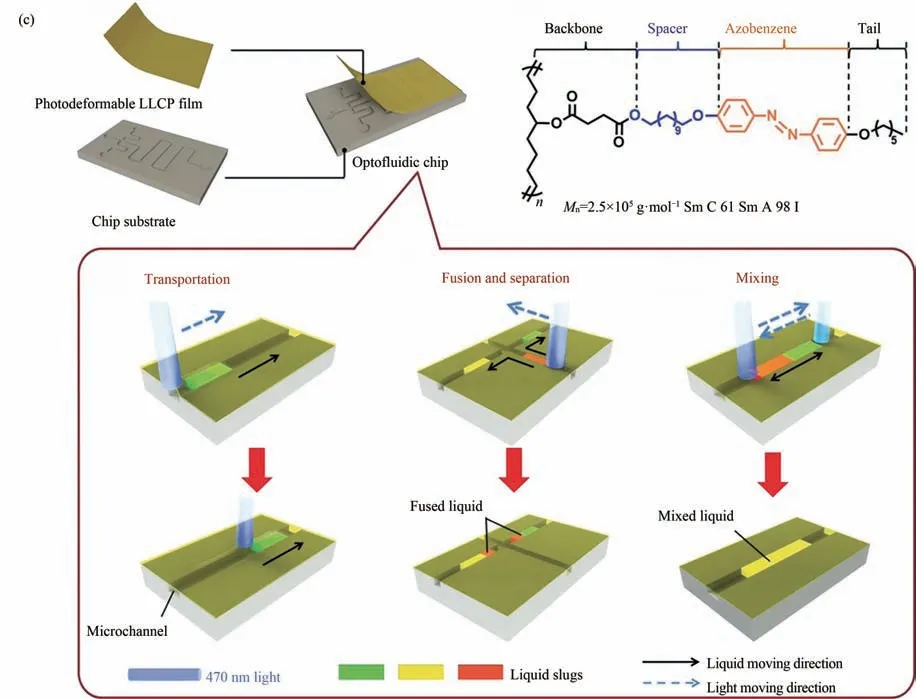
图8 微流控。(a)液晶高分子微阀在热刺激下驱动[55];(b)液晶高分子微管执行器在梯度光强照射下驱动液体运动[56];(c)基于液晶高分子的微流控芯片在光刺激下操控液体[57]。Fig.8 Schematic of microfluidic.(a)Schematic of LCPs microvalve driven by thermal stimulation[55];(b)Schematic of droplet motion in the LCPs microtubule actuator under gradient light irradiation[56];(c)Schematic of LCPs-based microfluidic chips manipulate liquids under light stimulation[57].
近期,俞燕蕾教授团队利用LLCP 和PMMA微通道基底结合,制备了可以光控的微量液体运输、反应平台[57]。如图8(c)所示,作者利用偶氮苯分子在470 nm 光照射下的Weigert 效应[58],偶氮苯反复的顺反异构化产生了自由体积。由于LLCP 薄膜被固定在PMMA 基底上,自由体积被转化为膜弧面的弯曲。从而在液体两侧产生不对称的截面积,在拉普拉斯压差的作用下驱动液体。利用Weigert 效应的优势是不需要对液晶高分子取向,简化了制备的工艺。此外,作者巧妙地利用毛细管冷凝效应实现了液滴的分离操作,极大地拓展了此类微流控芯片的使用场景,并利用此光控微流控平台实现了有机反应的合成和蛋白质的检测。
3.3 柔性执行器
相较于传统的刚性结构的执行器,柔性执行器具有更好的人机安全性、更轻的重量、更加多样化的控制等特点。而液晶高分子具有模量可调、刺激响应、应变量大的优点而被视为一种良好的制作柔性执行器的材料。
昆虫的集群是自然界中常见的一种现象,这些现象启发着人们寻找对于微机械系统中微小物体的可编程操控。近期,我们受昆虫Anurida maritima 在水面上的行为所启发,利用平行或者倾斜取向的偶氮苯液晶高分子膜执行器在紫外光刺激响应下弯曲的特性,设计了一种可以利用执行器弯曲产生的弯月面在水面实现对小型漂浮物体的可编程可控组装[59]。如图9(a)所示,当执行器被紫外光照射时会发生向光弯曲,改变附近液体的液面状态;当被可见光照射时,又会恢复平坦状态。通过不同的照射组合,可以实现执行器在水面上的不同组装模式。
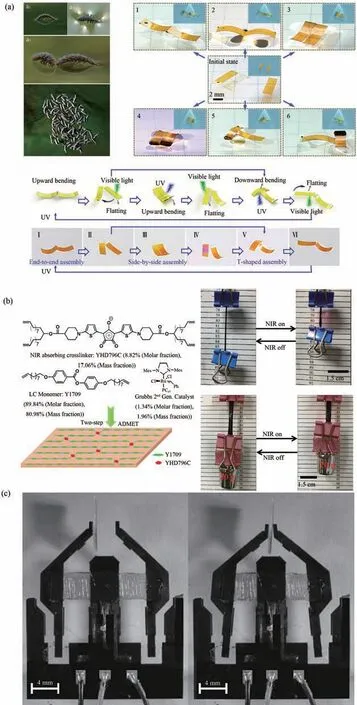
图9 软执行器。(a)液晶高分子柔性执行器在水面上的可编程可控组装[59];(b)基于液晶高分子的人工肌肉在近红外光刺激下产生形变[60];(c)微机电系统里基于液晶高分子的机械手在通电后夹取物体[61]。Fig.9 Schematic of soft actuators.(a)Schematic of LCPs soft actuators program and controllable assemble on the water sur‐face[59];(b)Schematic of deformation of artificial muscles based on LCPs under near-infrared light stimulation[60];(c)Schematic of manipulator based on LCPs in MEMS gripping objects after electrification[61].
早在1969 年,De Gennes 就预测液晶聚合物的刺激响应性能使其可能在人工肌肉领域有潜在的应用前景[9]。如图9(b)所示,Hong Yang 等人将对近红外光吸收的光热剂通过化学键的形式键合在高分子网络中,制备了在近红外光刺激下收缩的人工肌肉[60]。相比于传统的光热染料掺杂时可能存在的分散不均匀、稳定性不足、相容性差等问题,这种化学键键合的方式使得光热剂可以更均匀地分散在液晶高分子网络中。在实验中,在近红外光的持续照射下,温度从30 ℃升高到125 ℃,液晶高分子从向列相转变到各向同性相,杨氏模量在各向同性相时依旧可以保持在1.43 MPa,相对于传统的侧链型液晶高分子的各向同性相杨氏模量高出一个数量级。最后实现负载自身5 680 倍的物体的可逆伸缩操作。
除了作为人工肌肉外,液晶高分子的刺激响应特性也被用于微机电系统。如图9(c)所示,Antoni Sánchez-Ferrer 等人将液晶高分子薄膜集成到微系统中,制作了电控微机械手[61]。在施加1.5~3.5 V 的电压时,由于产生焦耳热导致液晶高分子膜发生相转变进而收缩带动抓手抓取达到自身重量400 倍的物体。最近,人们将控制单元、电源等设备集成到同一个平台,实现了基于液晶高分子的无束缚控制的机器人[6,62],为未来新型机器人的开发提供了新的思路。
3.4 基于复合材料的执行器
对于大部分的液晶高分子执行器,通常只具有相对单一的刺激响应特性,例如光刺激或者热刺激等单一刺激。如果要获得多重刺激响应,直接引入对不同刺激相应的官能团可能会增加合成的复杂性[63],一种比较简单的方法是将液晶高分子材料和其他材料复合形成多层的结构。此外,复合材料的引入还可以改善整体的力学性能,实现不同应用的需求。
自然界中的蜻蜓翅膀具有优异的力学性能,但是仅液晶高分子材料实现不了相同的性能,如图10(a)所示,Tianfu Song 等人通过将羟基引入偶氮苯的液晶高分子的侧链,与Kapton 纳米纤维形成氢键,实现了1.64 GPa 的高弹性模量,相比于天然蜻蜓翅膀高20~30 倍[64]。由于纳米纤维和高分子界面处的特殊作用方式,此复合材料可以在脉冲光照射下实现0.1~5 Hz 和1.50°~15.8°的连续调整。这一材料加工和设计方式为未来的微型飞行机器人提供了重要的材料设计思路。
液态金属因其良好的流动性和导电性,是一种在不影响原有材料力学性能的情况下的理想复合材料。如图10(b)所示,Hong Liu 等人利用磁性印刷技术将液态金属以电路的形式制备在液晶高分子表面[65]。当此复合材料受到外界如压力和应变的变化时,液态金属电路的电阻发生变化,实现对外界机械刺激的感知。同时当电路通电时,产生的焦耳热可以驱动器件形变。这一设计方法为未来开发智能软机器人提供一种简单可行的方案。


图10 基于复合材料的执行器。(a)Kapton 纳米纤维增强的液晶高分子膜的制备[64];(b)液态金属和液晶高分子复合的执行器的制备[65]。Fig.10 Schematic of actuators based on composite material.(a)Schematic of preparation of the composite film of Kapton nanofi‐ber-reinforced LCPs[64];(b)Schematic of preparation of liquid metal-LCPs actuator[65].
3.5 结构色
自然界中的生物通常存在着丰富多彩的颜色,其中一种机制是物体表面存在着微纳结构,在布拉格衍射下,会出现角度相关的结构色。为了使材料表面表现出结构色,需要在材料表面加工出微纳结构,现有的方法和材料有利用嵌段共聚物在液体中相分离产生分层纳米结构[66]、热纳米压印光刻法[67]、胆甾型液晶[68]等。
纳米压印技术可以在物体表面制备出微纳尺度的结构,但是传统的热纳米压印光刻方法会在冷却时收缩。于海峰教授团队将偶氮聚合物引入到柔性基底上。如图11(a)所示,由于基于偶氮苯的聚合物在紫外光照射下玻璃化转变温度显著下降,在不同波长光照射下,基底具有塑性可调的性质[69]。基于此,聚合物在聚对苯二甲酸乙二醇酯(PET)基板上呈现出丰富多彩的结构色。这种结构色不仅具有明亮的颜色,并且在防伪等领域有潜在的应用价值。


图11 结构色。(a)多重纳米压印制备和化学结构[69];(b)不同气压下结构色的变化[70]。Fig.11 Schematic of structural color.(a)Schematic of chemical structure and multiple nanopatterning fabrication[69];(b)Schematic of variation of structural color under different air pressures[70].
为了实现结构色的动态可调节和像素结构,如图11(b)所示,Shu Yang 等人制备了主链型手性向列相液晶弹性体薄膜,并将薄膜像素化地集成在气动的装置上[70]。当对密闭的空气通道的尺寸和布局进行几何编程后,可以实现液晶弹性体薄膜上从近红外到紫外波长的结构色转变。并且每一个气道内的颜色像素可以被单独控制。这种随应力变化的结构色可以被用在自适应光学、柔性机器人等领域。
4 结论
由于液晶高分子所具有的刺激响应、刚度可调、应变量大等特点,受到越来越多的关注。人们通过不断创新材料体系,探究新的取向技术和新的应用。本文重点论述了液晶高分子在合成时使用的取向技术和液晶高分子的功能和应用场景。
在二维的平面上,人们可以根据不同的材料体系、加工要求、取向要求选择适合的取向手段,以此满足不同的应用场景下的应用开发。但是,现有的取向技术仍然存在着种种问题:(1)在基于一步法的取向中,光诱导取向和表面诱导作用取向可以实现最复杂的取向结构,但是受限于液晶分子锚定在表面的作用力的范围,这类取向方式只能制备较薄的液晶高分子,这在许多的应用场景中受到限制。(2)为了实现材料更加复杂的形变行为,在三维空间中取向的液晶高分子成为必要,3D 打印技术可以实现三维结构的液晶高分子制备,但是其取向方向较为单一,无法实现复杂的取向。同时,在液晶高分子前体从针头挤出后,良好的取向往往只存在于挤出丝的外侧,内核的取向度较低,导致整体的响应性能会有所下降。因此开发适用性更强、可以在复杂三维空间取向的取向技术是未来新的研究方向。
对于现有的液晶高分子材料本身,也存在着种种问题:(1)热响应的液晶高分子驱动频率相对较低。主要原因是材料在加热和散热的过程较长,通过材料设计降低相转变温度可以减少加热时间,但是更低的驱动温度意味着和环境温度接近,导致降温相对较慢而延长了散热时间。而提高相转变温度虽然可以在降温过程中较快降到相转变温度以下,但是加热时间相对较长。这极大地限制了液晶高分子在柔性执行器中的应用。因此需要在器件结构和化学组成上进行创新设计解决这一问题。(2)在现有基于液晶高分子开发的柔性执行器中,器件往往是单独存在的,但是在实际应用中,这种简单的器件不能实现复杂的功能,将执行器集成在合适的系统上来实现更加复杂的功能将会极大地拓展液晶高分子的应用。
即使现如今液晶高分子材料还存在着种种问题,但是前面提到的一些优良性能依然在一些特殊场景具有取代现有材料的潜力。相信通过开发新的液晶高分子材料体系、更加简单的取向技术和更加集成的系统,液晶高分子材料在微流控、软执行器、传感器、可穿戴设备、结构色和防伪等领域找到新的应用点。
