基于绳驱动的辅助站立装置设计与研究
2023-02-21丁晓博韩飞坡蒋志伟郭家伟
丁晓博 韩飞坡 蒋志伟 郭家伟 韩 龙
(1.马鞍山学院 智造工程学院,马鞍山 243100;2.马鞍山学院 人工智能创新学院,马鞍山 243100;3.马鞍山学院 大阪医工学院,马鞍山 243100)
随着我国人口数量的增加,国家统计局预估到2022年我国65岁以上人口将占到总人口的14%[1]。基数庞大的老年人消费群体使得老年人生活辅助类产品愈发火热,其中辅助站立装置因可以帮助下肢力量不足的老年人实现站立,而备受青睐。
近几年,国际上很多学者均对老年人需要的辅助站立装置进行了大量研究。例如,美国凯斯西储大学设计了一种垂直方向升降式辅助站立机构[2],通过2个空气弹簧装置伸缩为用户提供垂直向上的力,帮助用户站立,但由于空气弹簧仅能上下运动,轨迹为一条垂直直线,使用不便。日本高知工科大学研制了一种站立康复训练系统[3],通过分析人体下肢动力学,将双绳控制拉力与运动轨迹辅助站立联合,开发了一套训练系统。斯洛文尼亚卢布尔雅纳大学研制的液压跷跷板式辅助站立机器人采用液压驱动[4],可实现人体起立。此外,国外还有很多其他的辅助站立机器人,其结构和原理对当代辅助站立装置的研究极具参考价值。在国内,孙技伟等人设计了一种基于变胞机构原理的老年自助椅[5],结合平面连杆机构的构造方法,引进变胞机构的概念,设计自助椅应用在老年人生活家居中。
以上辅助站立装置结构较复杂,价格高。根据国家统计局2021年5月11日发布的《第七次全国人口普查公报》,与2010年第六次全国人口普查相比,城镇人口增加23 641万人,乡村人口减少16 436万人,城镇人口比重上升14.21个百分点[6]。本文主要针对我国农村空巢老人及现有椅子机构,设计一种基于绳驱动的辅助站立装置。该装置在SolidWorks软件环境下进行结构设计,经数据校对、结构调整和Adams运行仿真,得到了具有较好实用性的设计方案。
1 基于绳驱动辅助站立装置结构设计
1.1 辅助站立装置组成
基于绳驱动的辅助站立装置的主要组成如图1所示,包括椅子1、主动轮2、棘轮3、卡爪4、定滑轮5、驱动绳6、定滑轮7、椅板8、动滑轮9、辅助轴10以及扶手11。椅子1类似日常生活座椅,椅板8可以绕椅子1前端横梁转动。扶手11前端安装主动轮2,棘轮3内槽可绕有一定量的驱动绳6,棘轮3内槽上开有与卡爪4发生卡位的卡槽。驱动绳6通过椅子1后方的动滑轮系统实现辅助轴10的升降。辅助轴10上有与椅板8稳定啮合的齿轮机构,能实现椅板8的升降。

图1 辅助站立装置主要组成
1.2 工作原理
使用者坐在辅助站立装置上,用手转动主动轮2。动力通过驱动绳6传递到定滑轮7,再由其传递到定滑轮5,促使动滑轮组工作。在一个平面内提升动滑轮9、辅助轴10竖直向上移动,且辅助轴10在上升转动过程中其上轮齿与椅板8底部齿槽依次对应啮合,使得椅板8能稳定绕着椅子前端横梁轴逆时针转动,从而把用户转动主动轮2的力转化为椅板逆时针转动的动力。随着椅板8受力,转动位置发生变化,使用者臀部、腰部分别前倾和提升,从而达到辅助站立的效果。上升过程中,使用者转动主动轮2存在间歇休息的情况。当主动轮2没有主动力的时候,卡爪4能够卡住棘轮3的槽口,防止主动轮2逆时针转动,使得椅板8可以在不同位置稳固停顿,实现使用者间歇休息的功能。当使用者实现站立后想恢复端坐,可拨动卡爪4解开卡爪4与棘轮3的卡扣,辅助轴10在自身重力下下降,椅板8在自身重力作用下实现顺时针转动,最终回到椅板8的初始位置。
1.3 驱动力及驱动绳尺寸计算
人体自然站立过程中的平稳主要依靠下肢多个关节协调转动支撑身体向上移动[7-10]。牛嵩云学者通过运动特征观察实验[11],得出辅助老年人起立的最佳起立角度为35°。本文设计辅助站立装置主要辅助人体实现从端坐姿态0°到辅助角度为35°姿态。
在河南省商丘市某村募集50名(25名男性和25名女性)60~80岁的老人参与研究。考虑个体之间肢体长度差异,表1列出了老年人基本数据的平均值。

表1 老年人基本数据平均值
根据表1基本数据设计绳驱动辅助站立装置,主要尺寸如图2所示。其中,手轮直径为100 mm,定滑轮和动滑轮直径为20 mm。
取老年人平均体质量为60 kg,则其重力G为600 N。在图3中对驱动绳进行受力分析,取E点处转矩为0,重力G受力处为椅板ED中间1/2处。考虑辅助站立装置左右对称,动滑轮中心受力FD为

根据动滑轮原理,A处手轮上驱动绳受力F1为

以图3中A为中心,手轮直径为槽轮直径5倍。若要保证手轮与槽轮静力平衡,手轮边缘驱动力为槽轮边缘驱动力5倍,故最终手驱动力F为15 N。

图3 驱动绳受力分析
驱动绳一端固定于A处手轮内槽处,一端固定于C处定滑轮下方位置,标注驱动绳与滑轮切点如图4所示。根据图4中驱动绳与滑轮之间的关系,可以计算出驱动绳长度l,即
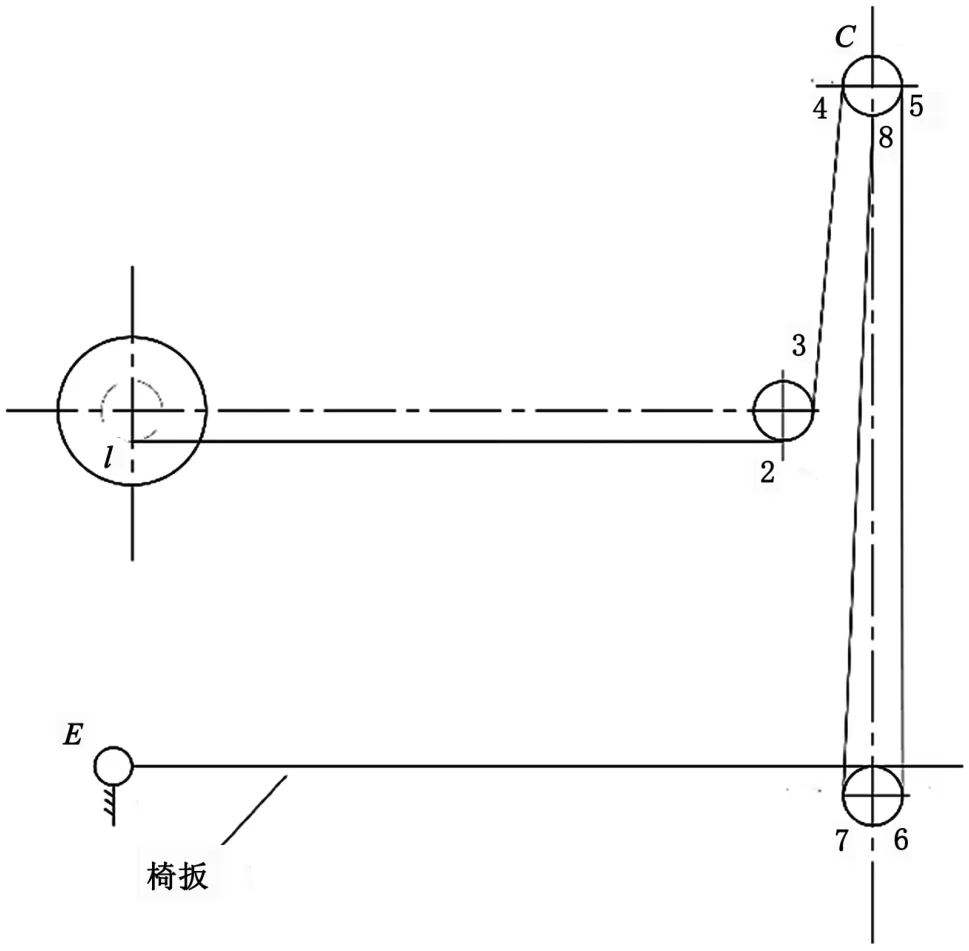
图4 驱动绳与滑轮关系

式中:l12、l23、l34、l45、l56、l67、l78的取值分别为440.0 mm、15.7 mm、231.3 mm、31.4 mm、442.3 mm、31.4 mm、421.0 mm。于是,计算可得l为1 213.1 mm,最终取驱动绳长度为1 500 mm。
1.4 椅板尺寸计算
图5中,绳驱动辅助站立装置核心为动滑轮D与椅板时刻接触,促使椅板绕点E转动,进而辅助人体站立。由于滑轮系统空间位置确定,在椅板达到辅助角度35°时,滑动轮D依然应保证与椅板接触,故椅板长度为
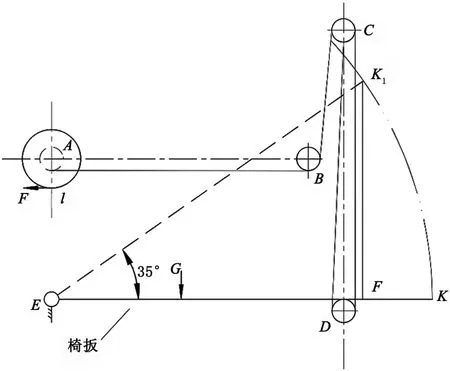
图5 驱动绳与滑轮关系

式中:lED为520 mm。于是,计算可得l椅板椅板长度为634.9 mm。根据表1臀宽尺寸,确定椅板尺寸为400 mm×700 mm。
2 基于绳驱动辅助站立装置运动性能仿真
根据图2提供的尺寸数据和现实中的椅子模型,在SolidWorks软件中建立绳驱动辅助站立装置的三维实体零部件模型。根据各个构件间的装配关系,建立对应的装配体模型,简化辅助站立装置的装配体结构,然后将简化后的实体模型导入Adams软件。首先,根据装配关系添加各构件间运动副,编辑各构件材料及质量属性;其次,将模拟人的体重设置为600 N,并以图5中E点为坐标原点建立笛卡尔直角坐标系;最后,添加驱动进行运动特性仿真实验,对绳驱动辅助站立装置进行性能评估。由图6可知,图5中动滑轮中心以6 mm·s-1速度上升,耗时65 s,动滑轮匀速上升390 mm。

图6 动滑轮位置与时间关系图
由图7可知,椅板可以转动角度为37.1°,超过原预设转动角度35°,用户大约花费65 s可实现辅助站立。

图7 椅板转动角度与时间关系图
当椅板转动角度为37°时,图5中K点的纵向位移为

式中:l椅板取700 mm。于是,计算可得K点的纵向位移约为420 mm。
由图8可知,椅板转动角度为37.1°时,椅板K点Y方向的距离为423 mm,与式(5)计算数据基本一致。

图8 椅板K点Y方向位移
图9为椅板整体质心速度,椅板在整个升起过程中速度变化平缓,且逐渐变低。
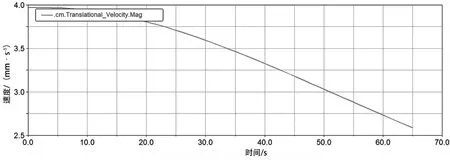
图9 椅板质心速度图
图10为椅板质心角加速度,椅板在整个升起过程中,质心角加速度变化较小,无较大冲击,上升平稳。

图10 椅板质心角加速度图
3 结语
针对我国社会老龄化带来的老年人站立问题,设计一种基于绳驱动的辅助站立装置。该装置可以实现辅助起身功能,结构简单,造价低,可在现有椅子上改进使用,在医疗辅助领域具有一定的实用价值。根据动滑轮定理,以60 kg老年人为例,使用者用15 N力转动手轮,即可自给自足辅助站立,省力轻便。辅助老年人起身站立37°的过程中,700 mm长度椅板纵向最大上升距离为423 mm,角加速度最大值为0.005 °·s-2,冲击极小,便于老年人使用。绳驱动辅助站立装置动力源还可以向电动源、手工动力源双动力源方向发展,进一步满足使用者个性化需求,提高装置使用的舒适度。
