基于多波段光源的智能痕迹分色方法
2023-02-19项双喜
高 毅,于 瀛,杨 絮,项双喜
(1. 中国刑事警察学院 痕迹检验鉴定技术公安部重点实验室,辽宁 沈阳 110035;2. 光电信息控制和安全技术重点实验室,天津 300308;3. 长春理工大学 电子信息工程学院,吉林 长春 130022)
引言
证据作为公安机关破案的依据,应充分了解案件,并利用先进的技术提高证据的可靠性和准确性,提高案件的侦破率[1]。痕迹检验是刑事科学技术的重要组成部分,指纹作为各类痕迹中的重要证据之一,对于案件侦破的重要性毋庸置疑。由于案件现场的复杂性,不同承痕客体之间形成重叠指印的情况愈发常见[2]。对于潜在的复杂有色背景中的指纹痕迹,选择何种光源及何种照射位置能最大程度地减少背景反射光进入镜头,增强指纹痕迹成像的清晰度和图像效果,提高指纹利用率,成为痕迹检验研究的重点课题。
物证检验经常会遇到需要显现和加强不同遗留条件下的指纹痕迹,如不同色彩光滑客体上的汗潜或油潜指纹等,简单的拍照记录很难拍出符合检验要求的图像。因此,需要运用特殊的拍照方法和技术[3],如脱影摄影、分色摄影、掠入射摄影、红外线摄影、紫外线摄影等,这些技术具有效果好、易掌握、设备简单等优点[4]。其中利用分色摄影技术和配光方法进行物证检验摄影,可轻松获得满意的物证检验照片,为刑侦部门提供线索和证据[5]。对于不同色彩背景中的指纹,单色光源的选取往往依赖于技术人员的主观经验。但有一部分刑事技术人员,由于缺少实践经验,需要多次尝试才能匹配出最佳的单色光源。对于深色光滑客体表面的指纹,在光源照射角度上可采用暗视场配光角度进行照射,以降低背景内反射光线,增大背景与指纹反射光线进入镜头的亮度反差。对于一些半光滑、不光滑背景表面具有漫反射特性的指纹痕迹,可采用掠入射配光角度进行照射,这样可使垂直方向上客体表面的定向反射光没有分量,从而增大亮度反差。对于光滑表面的血指纹,在使用定向反射法对手印进行拍照固定时,需要控制光斑大小,调节相机拍照参数,以增强手印纹线与客体之间的亮度反差,减弱或消除客体背景颜色对手印纹线的干扰[6]。
上述研究成果在相应条件下可以达到理想效果,但当现场勘查环境改变时,可能造成痕迹提取效果不佳,仅使用常规物证检验摄影方法难以突出痕迹物证的细节特征,拍摄记录的图像难以为痕迹物证检验鉴定提供条件[7]。最突出的是,单色光源和配光位置选择不能同时确定,如果只能满足单方面条件,那么最终的成像效果较差,导致近年来拍摄的指纹痕迹的图像处理信息研究很少。鉴于以上问题,本文设计一款能够智能找出最佳单色光源和最佳配光角度的痕迹分色摄影系统。
1 多波段光源设计
目前,刑事犯罪趋向于高智商化、职业化和手段多样化,作为主要勘察手段、以自然光源为主的刑事摄影,己经难以满足侦查破案的需要[8]。多波段光源是多个波段单色光输出的小型激光器,色光有长波紫外、紫光、蓝光、绿光和紫外线[9],也有基于半导体激光器光源的多波段激光物证搜索仪,利用激光单色性高的优点,提高光致荧光检查的视觉反差[10]。
利用STM32、TD28A009-07A 混合式步进电机、DEV8825 电机驱动模块、LED 灯,设计了一款轻巧型多波段光源。采用对称型结构降低光照不均匀的影响,缩减结构尺寸,通过引入电机驱动和STM32 实现光源智能移动,在保证足够分辨率的同时,可增大光源系统的视场角,以获得更加丰富的目标特征,提高了系统的目标探测和识别能力[11]。光源移动控制的升降电机原理框图如图1 所示。另外2 个混合式步进电机分别作为横移电机和旋转电机,电机驱动模块以相同的接法与它们相连。

图1 光源移动控制的升降电机原理框图Fig. 1 Schematic block diagram of lifting motor for light source movement control
2 实验平台搭建
基于多波段光源的痕迹分色摄影智能系统实验平台示意图如图2 所示。
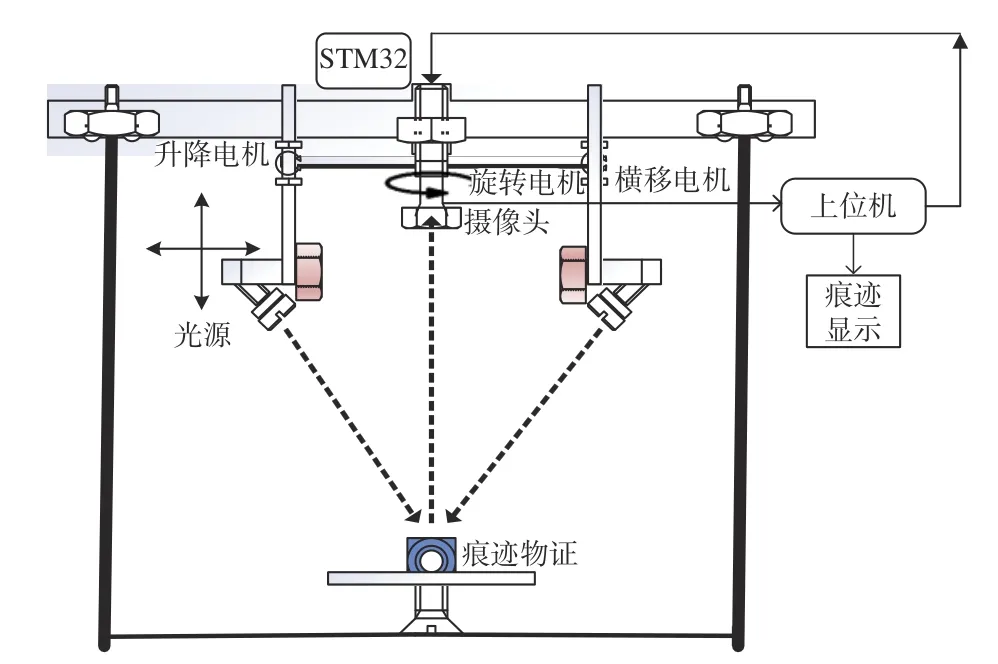
图2 实验平台示意图Fig. 2 Schematic diagram of experimental platform
该系统内部可自成一个暗室环境进行痕迹物证拍摄,亦可取出内部系统固定于支架上进行多环境拍摄,系统总体设计流程如图3 所示。

图3 系统总体设计流程图Fig. 3 Flow chart of overall system design
以样本为中心区域,由STM32 控制多波段光源模块进行初次照射,将痕迹背景首张图像传到痕迹分析模块,选出背景色的互补色。在垂直方向上,由升降电机控制光源从暗视场配光角度到掠入射配光角度移动配光,同时光源移动每隔0.02 m拍摄一张痕迹图像并记录光源位置信息,可控制电机转速来计算光源的位置信息,直到光源下降到掠入射配光角度停止拍摄。在此期间,光斑覆盖载物台且光斑中心区域与痕迹手印中心一致。利用痕迹分析模块,从以上摄影的20 张痕迹图像里,根据图像标准差、信息熵与平均梯度值选出痕迹手印纹理信息最好的一张,得到垂直方向上的最佳配光位置。升降电机控制光源回到拍摄该张图像的位置,横移电机控制光源在水平方向上重复上述实验过程,得到水平方向上的最佳配光位置,即最终的配光位置。在此位置上,旋转电机控制光源水平旋转90°再摄影一张痕迹图像,将拍摄到的2 张痕迹图像传至痕迹分析模块,经过图像配准融合,得到最终痕迹物证图像。计算并分析最终位置2 张图像与融合图像的信息熵H和平均梯度G值,并与传统配光角度进行对比分析,查看上述实验系统的性能。
3 图像处理算法
3.1 补色计算原理
为了抑制(或加强)背景的反射光线进入镜头,加强(或抑制)指纹痕迹反射光线进入镜头成像,以便加大背景和物证痕迹之间的亮度反差,得到暗背景亮条纹(或亮背景暗条纹)的图像效果,如图4 所示。

图4 六角色图Fig. 4 Diagram of six roles
图4 中每个角代表一个原色或补色,相邻两角的色称为邻色,某一色的邻色相邻的角称为间色,各角相对应的角称为补色(用虚线表示)。当色光通过不同颜色的滤色镜时,与滤色镜颜色相同的色光,其吸收率最小,透过率最大;邻色光大部分透过,吸收较小;间色光吸收较大,透过较少;补色光则呈强吸收,几乎不透过。反映在黑白照片上,与滤色镜颜色相同的色调呈白色,邻色光色调呈浅灰色,间色光色调呈深灰色,补色光色调呈黑色。黑白分色照相,就是选择不同颜色的滤色镜将不同颜色的色光用照相机和黑白感光材料,依据黑、灰、白的阶调记录呈现出来。其中互补色反差最大,分色效果最好,间色反差次之,邻色反差最小,分色效果也最差。根据上述结果,在分色照相中若想加强某色的反差,应选用该色的补色或间色滤色镜;若要消除或减弱某色的反差,则可选用该色的同色或邻色滤色镜[12]。
选择光源色光时可根据需要采用同色或互补色的单色光源进行照射,互补色有多种计算方法。在提取到背景色后,或用255 分别减去相应的R、G、B值,或在色环图中两色之间角度互补时取两者为互补色。
3.2 图像配准FS-SIFT 算法
对于不同时间、不同传感器和(或)不同视角的同一场景的2 幅(或多幅)图像,与1 幅图像相比往往含有更加全面的互补信息,将这些互补信息进行整合时关键一步就是图像配准[13]。
由于SIFT 算法是在不同尺度空间上查找关键点,因此需要尺度变换来获得不同的尺度空间,高斯卷积核就是可用的唯一线性核[14]。通过高斯函数计算高斯模糊模板,将其与原图像进行卷积运算,用来模糊图像,从而减少图像中噪声的干扰。SIFT 算法通过归一化处理特征向量长度可在一定程度上消除图像光照变化的影响。特征向量是由每个关键点邻域4×4=16 个种子点来描述的,每个种子点有8 个方向梯度信息,产生128 维特征向量。由于特征向量受邻域像素的影响,归一化无法消除光照变化较大情况下出现的暗光、高光现象,这对SIFT 提取特征点带来很大困扰[15]。
针对以上问题,采用改进的SIFT 特征提取算法,如图5 所示。
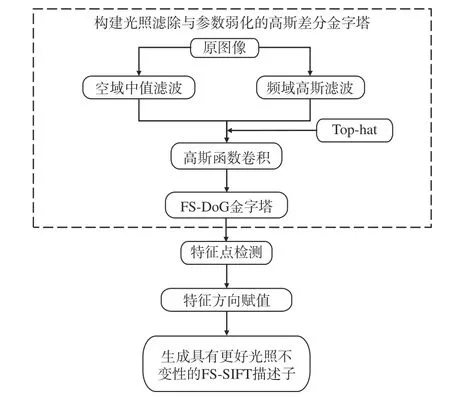
图5 FS-SIFT 算法流程图Fig. 5 Flow chart of FS-SIFT algorithm
在建立尺度空间前,首先将原图像在空域上进行中值滤波,并转换为频域图像,抑制噪声并消除孤立的亮点或暗点;同时将原图像在频域上进行指数高通滤波处理,降低不均匀光照的影响,并在去除光照成分后的新频谱中获得滤波图像;然后将2 个滤波图像相加得到新滤波图像,再将新滤波图像经过Top-hat 变换处理,以降低滤波参数带来的影响;最后计算变换图像和高斯函数的卷积,进而构成同时具有参数弱性和光线滤除功能的高斯差分金字塔(FS-DoG 金字塔)。FS-DoG 金字塔的图像在不受滤波参数影响下滤除了光照成分,以此替换SIFT 算法中高斯差分金字塔,再进行特征点检测及特征向量赋值,生成FS-SIFT 描述子。该描述子相较于原SIFT 描述子具有更好的光照不变性,此算法在对光照不均匀图像进行特征点提取与匹配时不受参数影响,且具有更强的鲁棒性[16]。
3.3 图像融合二代Curvelet 算法
融合技术使多源图像信息资源的利用率可最大限度地发挥,多源图像配准和融合技术的理论研究已经取得了很多成果,但是可实用的图像融合系统目前还处于实验阶段[17]。多源图像融合从目标识别层或属性上一般分为3 个层次:像素级图像融合、特征级图像融合和决策级图像融合[18]。目前较多的图像融合算法主要是通过图像的能量信息来完成系数融合,忽略了图像的纹理特征,导致融合结果中存在吉布斯以及块现象等缺陷[19]。本文采用二代Curvelet 变换图像融合方案。
二代Curvelet 变换藕合纹理信息调节的图像融合算法过程如图6 所示。

图6 二代Curvelet 融合算法过程Fig. 6 Process of secondary generation Curvelet fusion algorithm
算法主要分为基于Curvelet 变换的图像分解和图像系数融合两部分[20]。采用二代Curvelet 对多聚焦图像进行变换,得到不同的Curvelet 系数,这些系数蕴含了丰富的原图内容。在低频系数融合时,借助图像R、G、B值,构造纹理信息因子以测量图像的纹理度,并采用信息熵模型获取图像的信息丰富度,通过纹理信息因子和信息熵模型计算融合结果。在高频系数融合时,通过计算平均梯度来测量图像边缘等信息,以构造高频系数融合函数,从而输出融合结果[21]。
图像的不同系数反映了原图的不同内容,低频系数以描述图像的主体信息和纹理特征为主,信息熵通过图像的灰度特征来反映图像的信息量。因此,通过图像的R、G、B值构造了纹理信息因子,将其与图像的信息熵相结合,完成低频系数的融合,可改善融合图像的纹理信息量。
3.4 图像质量性能评价
3.4.1 信息熵
图像的信息熵描述了图像的平均信息量,熵越大,图像的信息量越大,融合效果越好[22]。选择图像的邻域灰度均值作为灰度分布的空间特征量,与图像的像素灰度组成特征二元组,记为 (i,j),即:

式中:Pij为图像中二元组像素所占比例;i表示像素的灰度值 (0 ≤i≤255);j表示邻域灰度均值(0 ≤j≤255);f(i,j)为 特征二元组 (i,j)出 现的频数;N为图像尺度。(1)式反应了某像素位置上灰度值与其周围像素灰度分布特征。图像的信息熵H为

3.4.2 平均梯度
平均梯度是一幅图像的梯度图上所有点的均值, 指灰度变化率的平均值,表示图像清晰度。这是由于图像的边界或影线两侧附近灰度有明显差异导致的,它反映了图像中的微小细节反差和纹理变化特征,即图像多维方向上密度变化的速率。一般来说,平均梯度越大,图像层次越丰富,变化就越多,图像越清晰。平均梯度计算公式为

3.4.3 标准差
标准差用来反映像素灰度值的分布状况,灰度标准差越大,图像的灰度级分辨率越高,图像效果就越好[23]。其计算公式为

4 实验结果与讨论
4.1 寻找最佳配光位置
在灰白色瓷砖上制作汗潜手印,通过互补色原理或色环图取得痕迹对应的最佳单色光后,电机驱动模块控制光源在垂直方向上移动配光摄影,如图7 所示。

图7 光源垂直方向移动痕迹摄影部分图Fig. 7 Partial images of moving trace photography in vertical direction of light source
从图7 中选出图像质量最好、信息量和纹理特征最丰富的图像拍摄位置,保持不变,电机驱动模块控制光源在水平方向移动,并拍摄客体痕迹,如图8 所示。

图8 光源水平方向移动痕迹摄影部分图Fig. 8 Partial images of moving trace photography in horizontal direction of light source
从图8 中水平方向上选出图像指标值最高的图像拍摄位置,比较2 个过程中图像标准差值变化,如图9 所示。从图9 可看出,在垂直方向上光源的最佳位置靠近暗视场配光角度,但图中暗视场位置0.1 m 处对应标准差却很小。在固定光源垂直高度后,光源在水平方向上移动,发现水平方向上有不少位置处SD 大于掠入射配光到暗视场配光之间部分位置上SD,拍摄图像的质量更好。表明靠经验仅在暗视场、掠入射位置或其他位置进行指纹痕迹摄影,很可能错过最佳的光源照射位置,从而错过得到信息量更丰富的痕迹图像的机会,使犯罪人员指纹信息仍然隐匿于客体背景中。
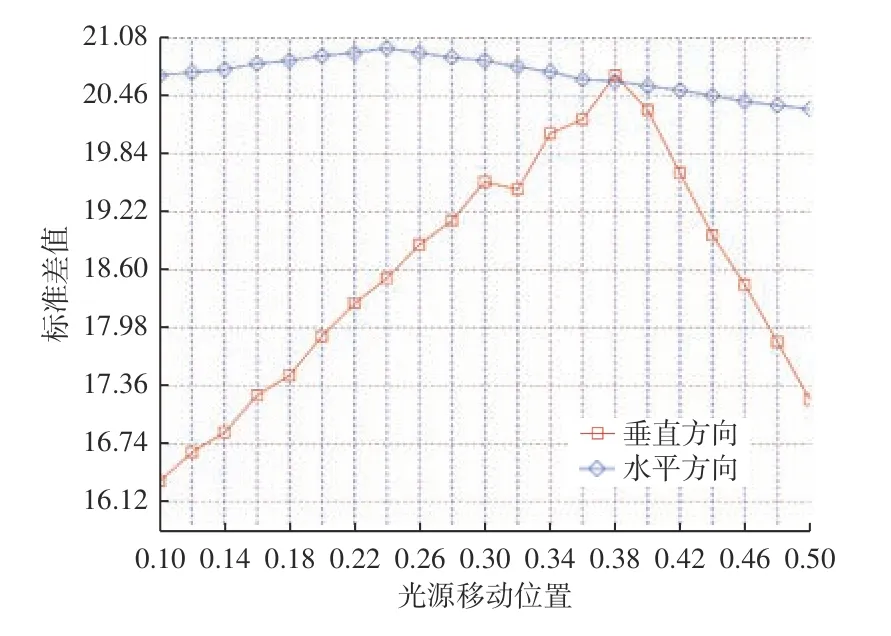
图9 灰白色亚光瓷砖汗潜手印摄影过程Fig. 9 Photography process of sweat latent fingerprint of gray-white Matt ceramic tile
在水平方向上,灰白色亚光瓷砖上的汗潜手印,其摄影图像的信息熵与平均梯度如图10 所示。结合图9 可以看出,最佳拍摄指纹痕迹图像的标准差、信息熵与平均梯度均在0.24 m 配光位置上,即该点处所摄影痕迹图像的质量、平均信息量和细节纹理特征都是最高的,故该位置为此特定环境下的光源最佳配光位置。
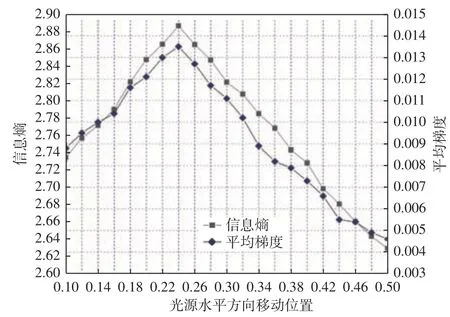
图10 水平方向上图像指标分析Fig. 10 Image index analysis in horizontal direction
4.2 最佳配光位置摄影
为了验证最佳位置处物证摄影图像质量的提升效果,将实验中最佳位置摄影图像与传统配光位置(暗视场、掠入射和定向反射)拍摄图像进行比较分析。
1) 在橙红色(255,69,0)亚光瓷砖表面上制作好潜在指印,该背景色的互补色为水绿色(0,186,255)。最佳位置与暗视场配光下痕迹图像对比结果如图11所示,图像指标对比结果如表1 所示。

图11 橙红色瓷砖表面潜在指印的分色摄影Fig. 11 Color separation photography of potential fingerprints on surface of orange-red ceramic tiles

表1 暗视场与最佳位置痕迹图像指标对比Table 1 Comparison of indicators of dark field and optimal position trace image
2) 在浅蓝色(0,0,175)亚光瓷砖上制作潜在指印,该背景色的互补色为橙色(255,255,80)。最佳位置与定向反射配光下痕迹图像对比结果如图12所示,图像指标对比结果如表2 所示。

表2 定向反射与最佳位置痕迹图像指标对比Table 2 Comparison of indicators of directional reflectionand optimal position trace image

图12 浅蓝色瓷砖表面潜在指印的分色摄影Fig. 12 Color separation photography of potential fingerprints on surface of light blue ceramic tiles
3) 在浅黄色(134, 137,0)背景塑料卡片上制作油潜指印,该背景色的互补色为紫色(121, 128,0)。最佳位置与掠入射配光下痕迹图像对比结果如图13 所示,图像指标对比结果如表3 所示。

图13 浅黄色卡片表面油潜指印的分色摄影Fig. 13 Color separation photography of oil latent fingerprints on surface of light yellow cards
由表1、表2、表3 可以看出,在最佳位置处,痕迹摄影图像各项指标均明显大于传统配光位置,即在几个经典配光角度所拍摄痕迹物证的图像信息量有很大提升。
4.3 最佳位置图像配准与融合实验分析
将最佳配光位置处的痕迹摄影图像与配光位置旋转90°的痕迹摄影图像,用传统SIFT 算法和改进的FS-SIFT 算法进行特征点提取分析,对比结果如表4、图14 和图15 所示。

表4 最佳位置图像与最佳位置90°图像客观评价指标Table 4 Objective evaluation indicators of the best position image and the best position 90 ° image

图14 传统SIFT 算法特征点提取Fig. 14 Feature point extraction of traditional SIFT algorithm

图15 改进的FS-SIFT 算法特征点提取Fig. 15 Feature point extraction of improved FS-SIFT algorithm
从图14 和图15 可以看出,改进的FS-SIFT 算法增加了有效特征点的提取数量,降低了无用特征点数量,同时提升了匹配准确率,如表5 所示。
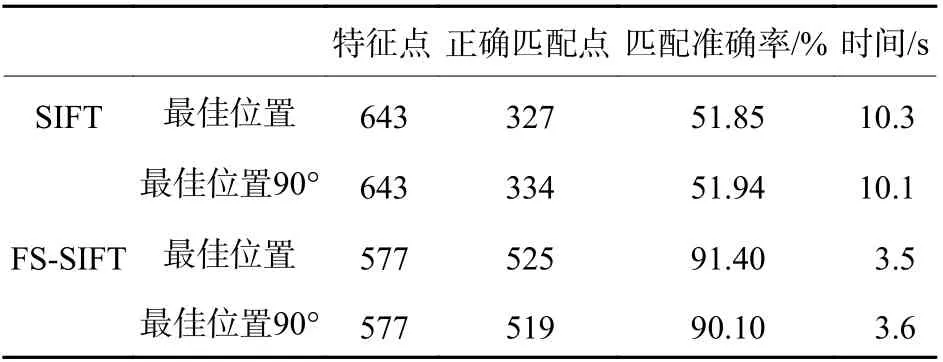
表5 传统SIFT 算法与FS-SIFT 算法特征精准度和时间消耗Table 5 Characteristic accuracy and time consumption of traditional SIFT algorithm and FS-SIFT algorithm
提取到痕迹图像的特征点后,将图14(b)和图14(d)(最佳位置特征点提取图和最佳位置90°特征点提取图)用传统SIFT 算法进行配准,将图15(b)和图15(d)用FS-SIFT 算法进行配准,结果如图16 所示。


图16 传统SIFT 算法配准图像和改进的FS-SIFT 算法配准图像Fig. 16 Image registration with traditional SIFT algorithm and image registration with improved FS-SIFT algorithm
将图16 中经传统SIFT 算法配准和FS-SIFT算法配准好的图像,再通过二代Curvelet 算法融合,结果如图17 所示。

图17 二代Curvelet 算法融合痕迹图像对比Fig. 17 Comparison of fusion trace images of secondary generation Curvelet algorithm

表6 二代Curvelet 算法融合图像客观评价指标Table 6 Objective evaluation indicators of fused image ofsecondary generation Curvelet algorithm
5 结论
针对不同背景环境中物证痕迹,办案人员可利用本文设计的系统解决最佳单色光和配光位置选取困难问题,同时解决了常规痕迹摄影技术提取痕迹物证时不能同步进行图像增强处理的问题,所得痕迹图像含有更丰富的平均信息量和细节纹理特征。
针对该系统,后续可用PYNQ-Z2 代替便携电脑进行图像处理以及控制光源变色和移动,使整个系统更轻巧便携,减少刑事办案人员的工作量。基于光的直线传播特性和客体痕迹“圆形”特点,可将本文设计的对称型光源系统改为间角120°的3 光源系统,尽可能地减少或消除光照不均匀带来的部分阴影困扰。
