链轮提升式叶菜收割机的研究
2023-02-17刘洪,张凯
刘 洪,张 凯
(南京信息工程大学 自动化学院,南京 210044)
0 引言
叶菜是指以植物嫩叶为主的蔬菜,如甜叶菊、菠菜、生菜等,已成为部分农民增收致富的重要经济作物[1]。中国蔬菜的种植历史已经有几千年了,在这几千年蔬菜的收获主要靠人力来完成[2]。但是人工收割过程成本高、效率低,于是逐渐开始研究使用机械来代替人力收割蔬菜,国外蔬菜收割的主要方法目前以机械收割为主。我国由于起步比较晚,蔬菜收获机械的研究缓慢,叶菜类蔬菜的机械化收割研究还处于空白[3]。目前,叶类菜的收割方式主要仍是以人工和部分传统的绿叶收割设备为主[4],据统计人工收割成本占整个种植成本的30%左右[5]。
1 设计思路
收割机是一体化收割农作物的机械,现今,我国有不少种类的收割机设备,但是大都是大型的收割设备,主要应用于大型农场的收割工作,在小型叶菜收割机上存在较大欠缺[6],尤其是在面对不同大棚内的不同收割环境时适用机型更显得缺乏。
目前,小青菜收割机的传送系统主要是采用传送带对切割下来的小青菜进行传送。该种传送装置为了防止小青菜的下滑,传送带的倾斜角较小,导致传送带所占空间很大,装置较为笨重,即使得收割效率变低也不利于大棚蔬菜的作业。于是计了一种具有链轮提升机构的绿叶菜收割装置。
2 叶菜收割机总体结构设计
叶菜收割机主要由切割装置、输送装置、高度调整装置、驱动系统等组成。整个收割流程简述:先通过高度调节机构来调节割刀高度,然后打开电机驱动拨禾轮和传送带开始运动。当收割机开始向前运动时,叶菜经割刀的切割和拨禾轮的拨动落到传送机构上,最后由链轮提升结构传动输送至收纳盒中。其总体设计如图1所示。

1.主轮;2.高度调节机构;3.割刀;4.拨禾轮;5.传送机构;6.侧板;7.收纳盒
3 收割机的关键部件三维设计
3.1 驱动系统
本叶菜收割机的驱动系统主要由多个电机、蓄电池以及主轮等部件构成。其中蓄电池固定安装在机架托板底部的控制箱中,为电机提供能源。割刀装置、拨禾轮、链轮提升机构处均配有一台直流电机。根据各部分机构要求搭配不同转速、功率的直流电机,确定合适转速比,其中割刀装置、拨禾轮、链轮输送机构、行走机构所选择的电机功率分别为:600,60,300,600 W。
3.2 割刀装置
为了简化收割机的结构并保证其适应性,本文最终选择了往复式切割装置。本割刀装置主要以直流电机为动力来源,通过曲柄连杆机构实现传动(其中曲柄由偏心轮代替),通过偏心轮的转动使连杆带动割刀发生往复运动,从而到达对叶菜根茎进行切割的目的。往复式切割器通过上下两部分的动刀片相向的往复运动,从而产生剪切作用,完成对叶菜的切割工作,上下刀头分别固定在刀杆上,与外驱动机构相连接,电机通过传动轴将动力传递到偏心装置,传动系统将回转变为割刀的往复直线运动。
为了利于切割,减少切割阻力,割刀刀片形状设计为梯形形状,而所切割的绿叶菜根茎直径一般较小,所以刀片设计为:刀片头尾两头宽度分别为20 mm和6 mm,刀片间距为30 mm,刀刃处采用切割角为20°带有倒角的结构。割刀切割频率越高切割越顺利,但切割频率越高,切割器的惯性越大,机器会因此产生很大的振动,造成零件的磨损等不良现象。通过对运动参数进行分析和求解可得割刀最低切割频率需大于8.3 Hz,可以保证割茬整齐及切割质量稳定。其割刀装置具体三维结构如图2所示。

图2 割刀装置三维图
3.3 带有链轮提升机构的输送装置
输送装置为叶菜收割机的重要组成部分,负责将切割后的叶菜输送至收集筐中。本收割机的输送装置主要由拨禾轮和链轮提升机构构成。其中链轮提升机构三维结构如图3所示。

图3 链轮提升机构
拨禾轮的主要作用是将待切割的蔬菜向切割器的方向进行引导,并在进行切割时对蔬菜进行扶持,同时将切割完成的蔬菜向输送装置进行推送,防止蔬菜堆积在切割器上。本收割机使用软毛刷作为拨禾轮叶片,一个拨禾轮上安装5个软毛刷叶片,整个拨禾轮装置通过电动形式提供动能,不仅达到了将叶菜拨动到传送带上的目的,也降低了叶菜的损伤率。
为了达到轻量高效的目的,本文设计了链轮提升机构来代替传统的皮带轮机构。链轮提升机构主要由主动轴、从动轴、链条、链轮和拨齿安装板构成。链轮安装在主动轴上,而链条一端与链轮发生啮合,另一端与拨齿安装板的底部平面固定连接。当叶菜经由拨禾轮推动进入拨齿安装板时,主动轴通过链轮使得固定在链条上的拨齿安装板发生移动,而拨齿安装板的拨齿部分垂直于安装板并且为波浪形状,这使叶菜在上面运输时既受到安装板静摩擦力也受到拨齿支撑力,不易下滑。不仅如此,拨齿安装板之间会有一些宽度为5 mm的缝隙,当有泥土随着叶菜进入输送装置时,这些缝隙能保证泥土随着叶菜的运动而从板间缝隙排出。
3.4 高度调节装置
基于不同种类叶菜收割部位及作业环境的不同,割刀的高度不应为一个固定值,于是设计安装了一种如图4的高度调节装置来进行调节。高度调节装置的设计为螺杆手轮,通过转动手轮,使割刀更加贴近地面完成不同高度的收割作业。其内部与滑台相连,滑台一端固定在转向轮上,滑台可调节部分与机架相连,当顺时针或逆时针旋转螺杆手轮时,通过螺杆和滑块的上下移动使整个机架和割台随之升降,进而实现对割刀高度进行调节。更好适应不同蔬菜切割高度的需要,从而实现对蔬菜的准确切割。根据实地需求本文设计的收割机切割高度可调范围大约为10 cm左右。
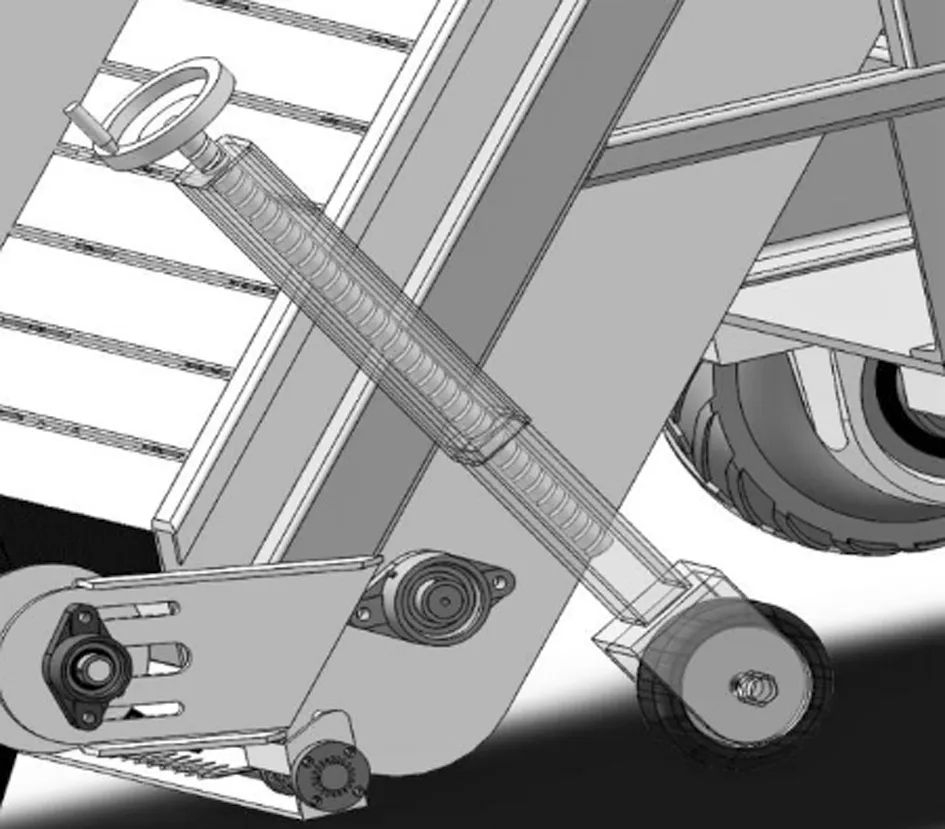
图4 高度调节装置三维图
4 试验结果
链轮提升式叶菜收割机整机装配后质量大约为150 kg。在装配后,选择了南京市六合区的一户农家农田作为试验地,分别以不同的行进速度、不同的拨齿安装板转速、不同挡位的割刀往复运动速度进行了多次试验,收割机的试验地作业情况如图5所示。

图5 收割机试验过程图
试验测量表明当调节行进速度为低速挡时,其行进速度为0~2.8 km·h-1,其收割效率可达0.5 hm2·h-1;当调节行进速度为中速挡时,其行进速度为0~4.5 km·h-1,其收割效率为0~0.15 hm2·h-1;当调节行进速度为高速挡时,由于行进速度较快反而造成叶菜收割损失率升高。综上所述,行进速度选择4.5 km·h-1时,其叶菜割净率最高,超过了96%,叶菜损坏率也低于期望目标值4%,基本达到了预期要求。
5 结论
基于链轮提升式而设计了一款叶菜收割机,论述了叶菜收割机的设计思路、关键部件设计,最后进行样机试验测定,通过试验验证了收割机到达预期目标,并为小型叶菜收割机提供了新的研究方向。
(05)
