水下观测机器人推进器的动态结构仿生设计研究
2023-02-15包海默赵天琦冯鸣许若麟安轩昂宋梅萍
包海默,赵天琦,冯鸣,许若麟,安轩昂,宋梅萍
(1.大连民族大学 设计学院,辽宁 大连 116600;2.大连海事大学 信息科学技术学院,辽宁 大连 116026)
结构仿生以仿生学为基础,通过总结自然界生物内、外部结构特征,模仿生物整体或局部的结构构造和功能机制来对产品进行创新设计[1-2]。结构仿生设计作为一种重要的产品设计方法,被广泛应用于建筑设计、服装设计、医疗产品、家具设计以及海洋设备等领域,具有广泛的应用价值。其中,在海洋领域对水下仿生机器人的研究中,诸多学者运用仿生的手段,通过研究海洋生物的形态学与运动学特征,模仿它们优越的游动方式,实现水下机器人的仿生推进,能够有效解决传统水下机器人螺旋桨推进带来的能耗高、噪音大、灵活性差、对海洋生态环境造成破坏等问题[3-4]。如Hu 等[5]和Zhou 等[6]通过模仿尼罗河魔鬼鱼研制了波动长鳍仿生推进装置;谭俊哲等[7]受水母喷射式推进方式的启发,研制了一种仿生水母机器人;Curet 等[8]模仿刀鱼研制了一款仿鱼长鳍波动水下航行器。然而,目前在仿生推进器的研究中,大多是对生物结构的机械模仿,缺乏动态结构仿生设计的理论指导,且目前对于动态结构仿生设计的研究也较少。本文以水下观测机器人推进器为例,运用动态结构仿生设计的方法对其进行仿生设计研究。
1 动态结构仿生设计概述
1.1 动态结构仿生设计
动态结构仿生设计是结构仿生的一种,与常见的对仿生对象静态结构的模仿不同,动态结构仿生设计主要是将生物的动态结构变化与产品在发挥功能时所发生的活动变化相对应,实现产品功能的动态结构与生物原型动态结构相一致[9]。动态结构仿生需以功能创新为导向,寻找具有相关功能的动态仿生对象,对结构变化以及相关的外形、肌理、色彩等动态变化进行抽取,利用现有的技术与设备对动态特征进行模仿,体现动态功能和实现的过程[10]。
1.2 动态结构仿生设计方法
动态结构仿生设计方法不同于对生物静态结构特征的仿生,而是强调了对生物动态形态与结构的模仿,对生物的外部形态、内部结构以及动态特征进行提取并与产品功能融合。动态结构仿生在流程上与传统的结构仿生设计类似,在设计过程中结合了自上而下和自下而上两种思路。“上”代表设计研发层面,“下”代表自然界生物层面[11]。自上而下的思路是指先从设计研发所遇到的具体问题出发,在自然界生物中寻找优良的特征并加以引用。自下而上的思路是指先从已知的自然界生物的优良特征出发,在技术层面对其原理进行分析并运用到设计研发中。本文提出的动态结构仿生设计方法如图1 所示。

图1 动态结构仿生设计方法Fig.1 Bionic design method of dynamic structure
(1)选择仿生对象,根据产品的目标需求与设计定位,查找相关资料,寻找与产品本身相关联的生物作为仿生对象并对其动态结构进行认真分析,为仿生提供客观依据,动态仿生目标生物需在功能需求与使用情景上与产品具有良好的匹配性,生物结构动态才能适用于产品功能创新;(2)动态结构特征提取,通过简化抽象的方法,依据一定的主次关系对生物动态结构进行提取[12],提取分为生物的外部形态、内部结构与动态特征三个部分,通过生物外部形态与内部结构的提取与转化以实现动态特征的表达;(3)生物特征与产品匹配,将提取出的生物形态、结构与动态特征转化为产品对应的形态、结构以及能够实现的动态功能,选取合适的材料与元件对产品结构进行设计,从而实现产品功能的需求;(4)产品集成创新设计,通过方案的推导与优化对产品整体造型与结构进行改良,在设计过程中要综合考虑产品的功能性、实用性、经济性等因素,从而实现产品集成与创新;(5)设计评价,通过仿真评估与验证等手段对产品进行设计评价,合理的评价能够指导仿生结果的迭代,若未能达到设计要求,重复进行步骤(2)~(5),使仿生结果逼近设计目标。
2 水下观测机器人推进器动态结构仿生设计实例
随着我国海洋牧场的不断开发,迫切需要对水质环境、鱼类生长状况等情况进行长时间在线监测。目前面向海洋牧场观测的水下机器人普遍采用螺旋桨推进,存在效率低能耗高、对环境扰动大、容易被海草纠缠、低速不稳定等问题[4]。而当前对螺旋桨推进技术的研究还存在一定的瓶颈,难以解决低速状态下推进的有效性等问题,鱼类经过漫长的进化,具备优越的游动性能,在推进效率和机动灵活性方面有着明显的优势,尤其是对环境扰动小和噪音小的特点在实际应用中具有非常重要的作用,为人类研制新型水下推进装置提供了模仿对象[13],因此,运用仿生手段来探寻新的水下机器人推进方式十分必要。本文设计实例将以动态结构仿生方法为原则,目的是实现水下观测机器人推进器的仿生设计。
2.1 仿生对象的选取与特征分析
水下环境的复杂性使鱼类产生了不同的形态,通过查阅大量海洋生物研究资料发现,在众多海洋生物中,以胸鳍波动推进的鱼类游动速度虽然不高,但在低速巡游的情况下推进效率相对较高,能够保持良好的稳定性,有着灵活机动和抗干扰能力强的特点。蓝斑条尾魟作为一种以胸鳍波动推进的鱼类,身体呈圆盘状,两侧胸鳍发达,身体左右对称,整个外形呈现出良好的流线型。在水下游动的过程中,通过身体两侧的胸鳍波动运动产生前进的推力,配合细长的尾巴能够实现机动转弯运动。游动时扁平的身体能够保持不动,稳定性良好,十分适合作水下观测机器人的模仿对象。
对蓝斑条尾魟胸鳍内部骨骼结构特征进行分析,如图2 所示,蓝斑条尾魟胸鳍组织内密布着无数鳍条软骨,鳍条呈放射状分布,每根鳍条由胸鳍肌肉组织连接[14]。鳍条软骨的这些特点,决定了其胸鳍产生波动推进所需的柔性和灵活性。胸鳍内的每根鳍条由背部肌肉和腹部肌肉驱动,在背肌和腹肌交替收缩和舒张的作用下,能够形成周期性的摆动,从而带动整个鳍面波动。此外,蓝斑条尾魟直线巡游时鱼体无明显运动,两侧胸鳍的运动呈现对称性,且波形类似正弦波。因此,本文旨在通过对蓝斑条尾魟胸鳍结构特征分析的基础上,对波动鳍推进器进行动态结构仿生设计,以期能够实现水下观测机器人的低速稳定航行。

图2 蓝斑条尾魟与胸鳍骨骼结构示意图Fig.2 Schematic diagram for bluespotted ribbontail ray and its skeletal structure of pectoral fin
2.2 蓝斑条尾魟结构特征提取
结构特征提取包括形态特征提取和功能机制提取,对蓝斑条尾魟的胸鳍骨骼结构特征、鳍面形态特征以及肌肉驱动功能机制进行提取和分析,采用特征分解与组合、结构简化、规则化、几何化等手法,对胸鳍部分进行特征提取。由于蓝斑条尾魟胸鳍关于身体左右对称,因此只对其单侧胸鳍结构进行提取。蓝斑条尾魟胸鳍结构特征提取如表1 所示。

表1 蓝斑条尾魟胸鳍结构特征提取Tab.1 Structural feature extraction of pectoral fin of bluespotted ribbontail ray
1)胸鳍骨骼结构。胸鳍组织内密布着无数鳍条软骨,整体呈放射状分布排列,因此鳍条设计成沿展向辐射状分布,形状抽象简化为直线,长度由中间依次向左右两侧逐渐变短,左右两侧鳍条关于中间鳍条对称分布,形成胸鳍的骨架。由于真实鱼鳍的鳍条数量较多,这里只提取了鳍条的排布方式,鳍条数量将在后文中进行论述。
2)鳍面形态。蓝斑条尾魟身体宽大扁平,呈圆盘状,左右胸鳍与鱼体前端融合相连。在鱼进行游动时,主要由左右两侧胸鳍提供动力,故不考虑鱼体头部前端部分的形状。因此,将鳍面外边缘提取为一条圆弧状的曲线,将鱼鳍基骨弧线简化为其外边缘的同心圆弧线,即胸鳍基线为弧线,鳍面为柔性,呈左右对称分布。
3)肌肉驱动。蓝斑条尾魟胸鳍的波动运动是由背肌与腹肌相互作用,并控制鳍条摆动实现的,肌肉作为鳍条运动的驱动器,可将单根鳍条的摆动提取为单一驱动器带动鳍条摆动。根据鳍条的运动原理,挑选符合功率的驱动器,使仿生鳍条能够带动鳍膜运动,从而形成整个鳍面的波动。
2.3 胸鳍结构特征与水下观测机器人推进器功能的匹配
将蓝斑条尾魟胸鳍结构特征与水下观测机器人推进器的主要功能和结构进行匹配来实现设计方案。考虑到水下观测环境为近海区域的海洋牧场,水下机器人需要达成低速稳定航行的目的。因此,在设计推进器的具体结构时,首先需要明确水下观测机器人的各项设计指标:结构形式为封闭式流线型、工作水深不大于 30 m、经济航速为 0.5 m/s、最大航速为1.2 m/s、主体长度不超过700 mm。如图3 所示,为波动鳍仿生推进器结构示意图。图3a 为推进器整体结构,壳体对其内部结构起到保护作用。图3b 为推进器内部结构,可以看出波动鳍仿生推进器可以简化为鳍条、鳍面以及驱动模块三个部分,将提取出的蓝斑条尾魟胸鳍结构特征与推进器的各部分功能特征匹配融合,得到各个部分的具体设计如下:

图3 波动鳍仿生推进器结构示意图Fig.3 Schematic diagram for bionic undulating fin propeller structure
1)鳍条。波动鳍的运动是通过所有鳍条按照一定的相位差规律性摆动并带动柔性鳍膜实现的,鳍条作为波动鳍的骨架结构,要综合考虑其数目、长度以及材料的选择。由于蓝斑条尾魟胸鳍的柔性波动是由若干鳍条联合摆动形成的,在结构仿生设计中,不能完全依据仿生对象胸鳍中实际的鳍条数目来设计。因此,对于鳍条数目的选择,按照单侧胸鳍呈现出的波数来确定,依据的理论是香农采样定理[15]。要想实现波动鳍能够拟合至少1 个推进波,在胸鳍基线上至少需要排布5 根鳍条。鳍条数目决定着胸鳍波动的柔顺性,鳍条数越多波动越柔顺,同时也会增加控制的复杂度和驱动器的数量,提高设计成本;鳍条数太少波动柔顺性差,影响其推进性能。因此,结合水下机器人的工作环境及尺寸大小,对鳍条数目的选择采取折中的办法,确定9 根鳍条沿胸鳍基线等弧度排布形成骨架结构,最多能够呈现2 个完整的推进波。在材料上,选择高强度、高模量、质量轻和易加工的碳纤维杆来提高仿生胸鳍波动姿态的控制精度。鳍条越长,仿生胸鳍产生的动力越强,但考虑机器人的最大主体长度,确定波动鳍鳍条长度为150 mm。
2)鳍面。波动鳍鳍面设计依据对蓝斑条尾魟胸鳍鳍面形态特征提取出的基本形状以及鳍条的长度,设计出仿生推进器中鳍面的具体参数,包括鳍面几何形状的设计和鳍面材料的选取等。鳍面形状的外形为扇环,内、外圆弧共用一个圆心,将鳍面按照鳍条数n=9 进行等分,可得到8 个子鳍面,相邻子鳍面共用一根鳍条,鳍面外圆弧半径为350 mm。鳍面材料的选择主要考虑两个因素:一为鳍面的主动变形能够推动水,二为鳍面在水动力作用下容易产生被动变形,因此,选择低弹性模量的薄的硅胶薄膜作为仿生胸鳍的鳍面材料。
3)驱动模块。鳍条的摆动依靠驱动模块提供动力,因此,需要选择合适的驱动方式。通过对比市面上已有的机电驱动元件,发现伺服舵机在输出扭矩、操控性、响应速度等方面符合需求,满足鳍条驱动的功能,因此,在仿生波动鳍中选择舵机作为驱动器。选择型号为Power HD 1812MG 的防水舵机,其在输出功率、可控性、防水性、体积、重量等参数上综合表现良好,比较符合本研究中仿生波动鳍的设计要求。
此外,还对舵机的安装、舵机与鳍条的连接、鳍条与鳍面的连接进行了合理的设计,对于舵机的安装,依据其尺寸大小和鳍面形状,设计了铝制的弓形支架配合螺钉螺母安装固定舵机,用这种方法使舵机安装容易且更换简单。由于机器人的工作环境为水下,还需考虑波动鳍推进器的密封设计,对于波动鳍壳体本身的密封,需对舵机转动轴与壳体开口处进行密封处理,开口处的密封不仅要实现鳍条的往复摆动,也要对其进行防水处理。推进器的9 个舵机等弧度排布分别控制9 根鳍条,每根鳍条独立可控,最大摆角为35°,鳍条连接鳍膜,通过控制改变相关参数可以实现波动鳍多种波形的呈现。
2.4 创新设计方案
按照本文对水下观测机器人仿生推进器的动态结构仿生设计,结合本文设计的水下观测机器人的设计指标,提出一种面向海洋牧场观测的水下机器人设计方案,最终得到的水下观测机器人方案效果如图4所示。水下观测机器人的壳体要求耐压和密封,为减小前进方向的航行阻力,降低机器人自身的能耗,提高其续航能力,将壳体外形设计为类似鱼雷的流线型。结合本研究设计的水下观测机器人的性能要求,设定机器人主体部分的尺寸直径为246 mm,长度为690 mm,主要由头部、尾部、中间段和外壳组成。波动鳍仿生推进器对称排布于水下机器人主体两侧,在水下观测机器人航行的过程中,保证了其运动的稳定性,两侧波动鳍通过鳍条有规律地摆动形成了鳍面的波动。
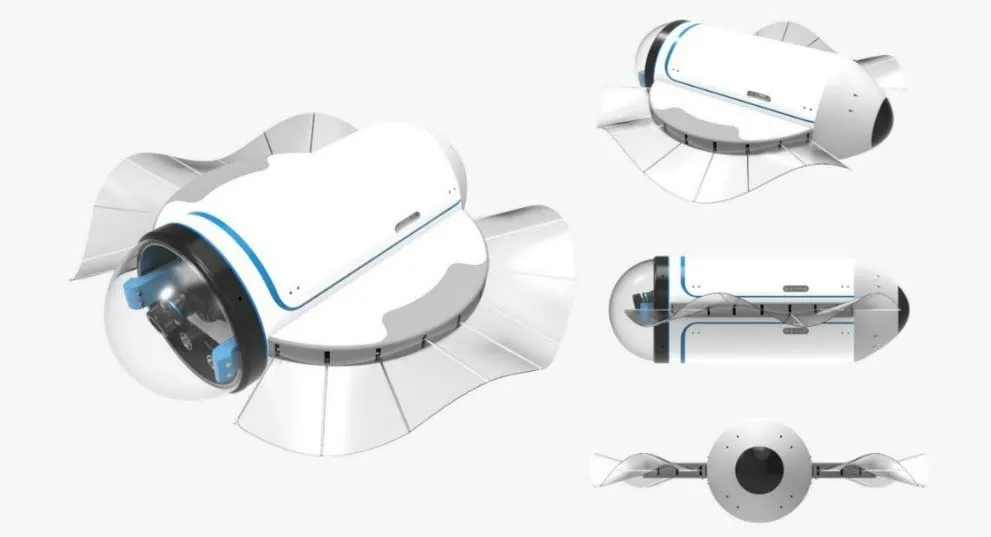
图4 水下观测机器人方案效果图Fig.4 Renderings of underwater observation vehicle scheme
3 流体动力学仿真评估与设计评价
3.1 流体动力学仿真评估
计算流体力学(Computational Fluid Dynamics,CFD)主要通过计算机和数值仿真的方法来求解控制方程,以模拟和分析流体力学的基本问题[16]。本文利用CFD 数值模拟结合用户自定义函数(User Defined Function, UDF)对波动鳍进行动力学仿真计算,CFD求解流程分为前处理、数值求解以及后处理,其中数值求解过程是把在前处理中划分好的网格导入仿真软件进行计算,并对相关参数进行设置,本文将Fluent 软件作为求解器。
首先建立波动鳍和计算域的物理模型,然后对各个边界进行命名,方便在Fluent 求解器中对边界条件进行设置。采用非结构化网格划分的方法,通过对波动鳍附近流体区域的网格进行加密来提高计算结果的精确度。根据蓝斑条尾魟胸鳍的波动运动编写了相应的UDF 程序,只需要对UDF 程序中的频率、幅值和波数三个运动参数进行赋值,便可实现对应波动鳍的运动状态,并确定了相应的仿真参数进行求解。选取运动参数波动频率f=2 Hz、幅值θ=30°、波数n=2进行仿真实验,由仿真计算结果可知,后台监测到的阻力系数为0.17,相应的阻力值为12.77 N。待波动鳍运动稳定后(见图5),从图5 中可看出:

图5 波动鳍表面流场压力云图Fig.5 Pressure nephogram of undulating fin surface
1)波动鳍在波动过程中,按照正弦波的形式呈现周期性运动规律,高压区域出现在鳍面的迎水面一侧,低压区域出现在背水面一侧,并随着鳍面的波动而变化。波动鳍表面形成的局部压差,使其产生前进的推力。
2)波动鳍表面高压区域的高压中心处于靠近鳍面外边缘的位置,压力数值由鳍面外边缘向鳍面内边缘逐渐减小,这与波动鳍中鳍条的运动模式有关,越靠近鳍面外边缘的位置,位移和线速度越大,受到的流体反作用力也越大。因此,鳍面外边缘附近区域是波动鳍实现运动的主要动力来源。
之后对水下观测机器人进行了初步的仿真验证,假设水下机器人在航行中不会受到洋流等一些因素的干扰,只模拟机器人在稳定环境下的运动状况,因此,仿真时只考虑机器人航行时受到的阻力。采用Fluent 进行仿真,模拟水下观测机器人在最大航速1.2 m/s 下的阻力值,得到的阻力系数如图6 所示。

图6 阻力系数迭代曲线Fig.6 Iterative curve of drag coefficient
可见阻力系数值在0.5 附近时趋于平稳,且由软件后台监测得到最终收敛的阻力系数值为0.501,相应的阻力值为24.15 N,则单侧波动鳍至少需要产生12.08 N 的推力才能使水下机器人保持匀速稳定航行。通过对波动鳍流体动力学仿真可知,当频率f=2 Hz、幅值θ=30°、波数n=2 时单个波动鳍仿生推进对应的推力值为12.77 N,与水下机器人最大航速稳定航行时单侧波动鳍所需的推力值较为接近。由此可知,本文所设计的仿生波动鳍仿生推进器达到设计要求,能够基本实现低速稳定航行的目的。
3.2 设计评价
水下观测机器人采用波动鳍仿生推进的方式,在水下航行的过程中,两侧波动鳍通过鳍条有规律地摆动形成了鳍面的波动,鳍面在波动的过程中会形成局部的压差使其产生了前进的推力。通过流体动力学仿真评估的方法,验证了波动鳍能够产生有效的推力,证明波动鳍推进器达到了水下观测机器人的设计目标,初步实现了水下观测机器人在海洋牧场观测环境中的应用。综上,搭载了本研究设计的波动鳍仿生推进器的水下观测机器人能够有效提升海洋牧场的观测能力,这对于海洋牧场的智能信息化水平以及海洋产业的健康可持续发展具有重要意义。
4 结语
本研究结合结构仿生原理提出了动态结构仿生设计方法,以水下观测机器人推进器设计为例对设计方法进行了有效性验证。通过模仿蓝斑条尾魟的胸鳍波动推进结构,对水下观测机器人的波动鳍仿生推进器进行了动态结构仿生设计,以流体动力学仿真作为评估方法,得到了波动鳍表面压力变化情况,进一步验证了本文所设计的波动鳍仿生推进器能够产生一定的推力。该方法为水下观测机器人推进器的相关设计研究提供了参考,为实现波动鳍推进仿生水下机器人在海洋牧场观测环境中的应用具有一定的借鉴意义。