基于GNSS-RTK技术的风电机组机舱位移和轨迹研究
2023-02-13刘智超张鹏姜禹含齐男李永亮李满达吐
刘智超 张鹏 姜禹含 齐男 李永亮 李满达吐
(蒙东协合开鲁风力发电有限公司)
0 引言
风力发电机组塔架振动频率处于低频段,通过获得机舱(塔顶)低频绝对位移数据,可以对机组叶轮不平衡、机组稳定性评估、塔架载荷反演等方面提供有效数据支撑,无论是对机组稳定性控制还是优化仿真和技术研究具有重要的价值和意义。常规的测量手段很难获得有效、稳定和低成本的测量方案[1-4],而GNSS-RTK定位技术利用全球导航卫星系统的RTK载波相位差分技术,实时处理基准站和移动站所得载波相位的差分结果,能够获得动态的厘米级定位精度[5-7]。
1 技术说明
1.1 宏观性能测试
RTK(Real Time Kinematic)是以载波相位观测值进行实时动态相对定位的技术,其原理是将位于基准站上的接收机观测的卫星数据,通过数据通信链(如无线电台)实时发送出去,而位于附近的移动站(流动站)接收机在对卫星观测的同时,也接收来自基准站的信号,通过对所收到的信号进行实时处理,给出移动站的三维坐标,如图1所示,RTK技术可以在很短的时间内获得厘米级的定位精度[8-10]。

图1 GNSS-RTK技术拓扑图
基于GNSS-RTK技术的风电机组机舱位移测量的现场实施方案如图2所示,移动站通过RTK定位技术获得经纬度信息传递给风电机组主控,主控通过经纬度转位移计算模块以及前期的标定参数实时计算机舱偏航坐标系下X方向和Y方向的数据。

图2 实施方案示意图
1.2 坐标转换说明
机舱绝对位移计算原理图如图3所示。O点为塔底坐标系原点,对应塔底塔筒圆心,O1对应塔顶塔筒的圆心,忽略塔筒制造安装和重力影响,O点将与O1点重合,实际情况由于机舱重心不在塔筒轴线上,O1通常会向机舱前部倾斜一段距离,O2点为机组受到风载作用,机舱运动到达的随机位置对应的坐标点。点A、点B和点C位于测风支架之上,A和C位置分别安装两只天线,A为主天线,C为副天线,两天线可以测量AC指向,可用于向量解析坐标数据,B位置为测风支架中心,AO1指O1状态下A点位置,其他坐标以此类推[11]。

图3 坐标转换关系图
A坐标的变化即为测量点的轨迹变化,OO2的变化即为机舱的绝对位移变化,计算关系如式(1)所示:

地球椭球的第一偏心率公式如式(2)所示:

地球椭球的卯酉圈曲率半径公式如式(3)所示:

AO2在塔筒坐标系下距离坐标(Xi,Yi)计算公式如式(4)和式(5)所示:

AB距离(测点和测风支架中心距离)通过现场实测获得,O1Bo1尺寸通过机组设计图纸获得,通过坐标向量转换关系可以获得O1点距离坐标O1(X1,Y1),O2(X2,Y2)点坐标同理可以获得。
2 标定说明
2.1 安装部署
安装部署机组基本参数信息如表1所示,测量天线安装实物图如图4所示,右边为主天线,左边为副天线。
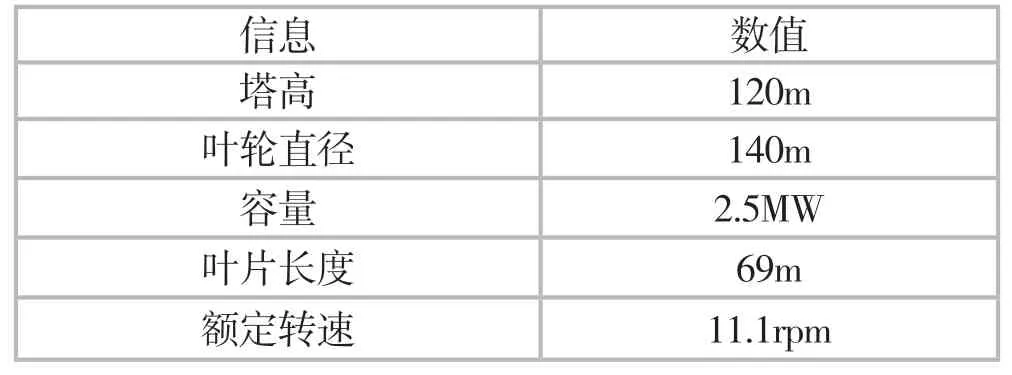
表1 测试机组基本信息

图4 现场移动站和基站天线实物图
2.2 安装部署
卫星定位定向系统安装在机舱顶部测风支架上,可输出航向角、经度、纬度等,通过标定与换算,可实现塔顶绝对位移的测量。标定的意义在于通过机舱在无风或小风工况下,机舱偏航若干周绘制出定位天线的轨迹,进而计算出塔架实际轴线经纬度坐标,作为后续卫星定位数据处理过程中的参考坐标。
绘制出标定过程机组经纬度变化时序图,如图4所示。以经度为横坐标,纬度为纵坐标,绘制出经纬度椭圆,如图5所示。
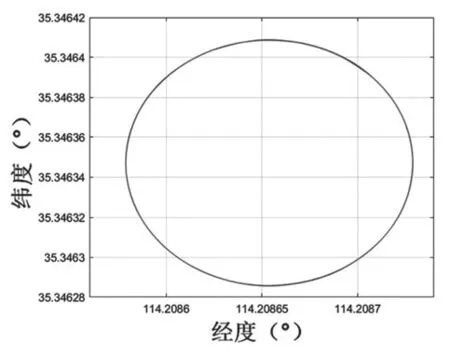
图5 标定全过程经纬度变化情况
通过上述椭圆拟合和迭代求得塔顶中心点O点最小误差的经纬度,如表2所示。如前所述,O点可以理解为塔架无内应力(塔底无弯矩载荷)状态下塔顶所在的位置,卫星定位系统可同时测量出机组所处的海拔高度。表2中的数据将直接应用于算法程序中。
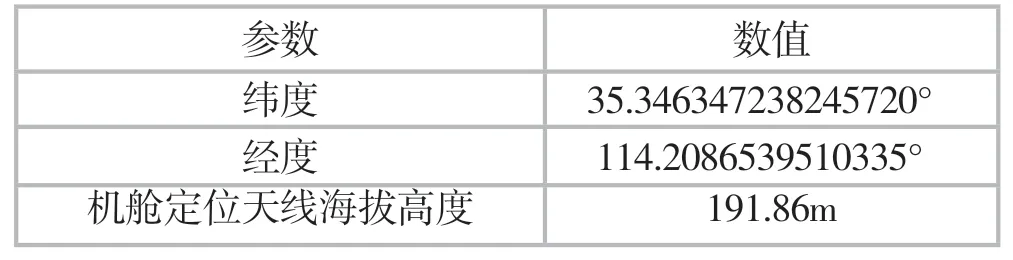
表2 塔顶中心点O点经纬度
通过机舱设计图纸和现场安装实测得到O1Bo1尺寸和Ao1Bo1尺寸,通过式(1)获得OAo1测量天线轨迹和OO1机舱轨迹,如图6所示。
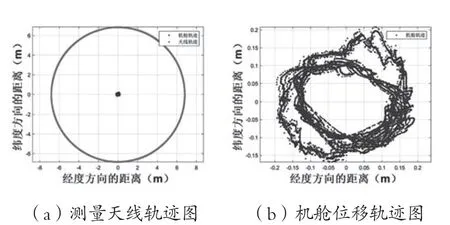
图6 测量天线和机舱轨迹图
如图7所示,机舱在无风、小风条件下连续偏航,通过GNSS-RTK测量的机舱位移均值为0.138m,最大值0.22m,最小值0.07m,均方根0.028,可以观察出,偏航过程中机舱存在晃动,晃动幅度大多数数据在±0.05m,这应该是风载和偏航系统内部激励力等因素导致的。通过实测数据得到机舱由于重力作用向前移动了0.138m,通过机组Bladed静态仿真得到机舱由于重力原因会向前移动0.126m,距离实测值仅仅相差1.2cm,可见通过该测量方案可以得到机舱位移数据,精度可达到厘米级别。

图7 机舱绝对位移幅值和分布直方图
3 标定说明
3.1 安装部署
机组塔顶绝对位移是通过卫星主天线经纬度坐标向位移坐标转化,以及相关尺寸链解算而得到。通过分析工况数据、机组运行状态以及机舱定位定向数据进而分析机组定位数据的有效性和稳定性等信息。
如图8所示,分别展示了卫星测量天线轨迹、机舱绝对位移轨迹,机舱航向是以机舱机尾指向机头为X正方向,机舱右侧指向左侧为Y方向正方向(右手坐标系)。

图8 机舱运动情况下数据分析
机舱在风载作用下,机舱X方向位移基本为负值,包括小风和停机在内,机舱运动范围在-1.0~0.3m之间。其中在数据中可以明显看出一次停机过程,机舱从-0.6m急速移动到0.3m后振荡稳定下来。
通过以上分析可以得出GNSS-RTK能够很好测量机舱绝对位移,可以达到厘米级精度。
3.2 相关性分析
当机组机舱正对风向时,机舱受到向后的推力,尤其是机组并网发电时,机舱前后晃动的幅度很大,如图9和图10所示,展示了现场机组发电和待机时机舱偏航坐标X方向位移与风速之间的关系,蓝色散点为实测值,三角标记分别为0.1和0.9分位点,红色圆点为均值。如图11和图12所示,展示了现场机组发电和待机时机舱偏航坐标Y方向位移与风速之间的关系。

图9 发电时机舱X方向位移与风速之间的关系
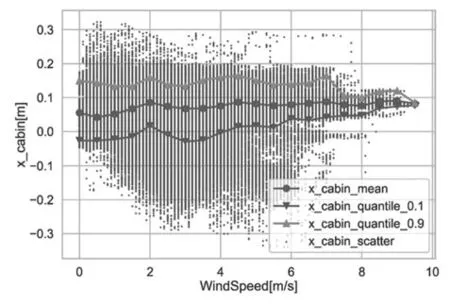
图10 待机时机舱X方向位移与风速之间的关系

图11 发电时机舱Y方向位移与风速之间的关系
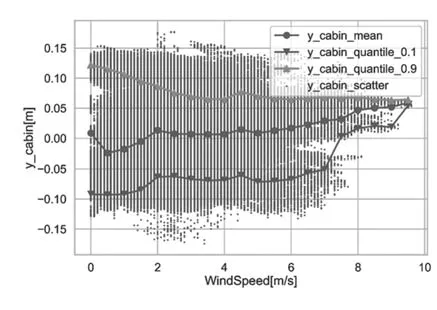
图12 待机时机舱Y方向位移与风速之间的关系
可以得到以下规律和结论:
1)机组发电时,随着风速增加,在9m/s风速时,机舱X方向位移达到最大值,均值为-0.561m,0.1和0.9分位数分别为-0.674m和-0.374m,随着风速递增,机舱位移最大值减小,这和机组控制策略和出力方式有关。
2)机组待机时,机舱X方向位移变化不大,基本在0.08m左右前后微微晃动,按照标定时机舱前倾0.14m来计算,风载使得机舱后移了0.06m。
3)机组待机时,机舱Y方向位移变化不大,基本在0左右晃动。
4)机组发电时,机舱Y方向位移在随着风速从5m/s上升,机舱晃动位置在0.1m左右,即来风方向是叶轮的右前方,推断为机组对风偏差或地形等原因导致。
4 结束语
本文提出一种基于GNSS-RTK技术的风电机组机舱位移和轨迹的研究方法,阐明了标定的基本方法和应用案例,通过仿真和实测数据的维度论证了技术方案的有效性和准确性,可以得出以下结论。
1)建立测点位置和机舱中心坐标尺寸链关系,通过向量转换能够将经纬度信息转化为坐标信息,进而转换为机舱绝对位移信息,通过小风偏航测试活动就能标定实现。
2)机组小风偏航过程中,机舱中心位置变化的Bladed仿真结果和实测结果偏差仅为1.2cm,完全能够实现厘米级的绝对定位精度。
3)通过分析工况数据、机组运行状态以及机舱定位定向数据,机舱运行和待机时的位移结果和工况相关性明显,说明了测量的机组绝对位移数据的有效性和准确性。
