高空带电作业旋转平台设计研究
2023-02-13李晓洋符祥干高元将陈焕财谢盛顿
李晓洋,符祥干,高元将,陈焕财,谢盛顿
(海南电网有限责任公司 海南输变电检修分公司,海南 海口 570100)
电力检修工作中往往需对电杆顶部的电气设备、电源线进行检修维护。电力检修作业方式主要包括停电作业和带电作业。停电作业虽可以保证安全,但断电会产生较大的经济损失,因此,工作实践中通常采用带电作业,而用于带电作业的平台包括绝缘梯、斗臂车、升降平台等,但绝缘梯、斗臂车等平台装置使用限制多,不适合田野、斜坡等作业环境。因此,升降载人平台得到了广泛应用,但常规升降载人平台只能上下升降,无法绕电杆转动,限制了作业的灵活性。本次设计的远程遥控式旋转升降载人平台,在保证作业安全的基础上实现了带电作业的自动化。且易于拆卸。组装完成后,平台以齿轮抱箍作为主要支撑结构固定在电杆上,可根据需要围绕电杆旋转最大320°。同时,采用无线遥控控制平台的旋转和升降。本次设计内容可分为结构设计、控制系统设计。
1 设计要求
该平台整体需方便拆装,不用是可拆分,需用时可组装,所用材料需满足规定的电气性能要求、绝缘要求。载人平台作为支撑结构。平台的顶部和底部分别设有两个支撑杆,与平台形成三角支撑体,不但可以提高平台的承力能力,还可以有效避免人员从高空坠落。在电杆上设置齿轮抱箍,齿轮抱箍上设置滑轮,牵引绳绕过滑轮与载人平台、牵引电机连接,组成传动系统,满足平台的升降需要,抱箍上的齿轮与电机传动机构配合实现平台的旋转。
2 平台功能
2.1 绝缘性能
进行高空带电作业时,最重要的是可靠绝缘,平台绝缘材料选择环氧树脂。可以提供可靠的绝缘性能,平台设置了垂直梯,可上下移动0.4m,在安全距离内实现灵活升降。
2.2 旋转功能
为了实现平台旋转功能,设计齿轮抱箍、电机和传动机构等部件。齿轮抱箍由两组半圆齿轮组装而成,将半圆齿轮对接固定在电杆上作为支撑结构。电机设计参数为直流24V/250W,电机向齿轮减速机传递动力,转动比为30/1,齿轮减速器向齿轮抱箍传递动力,实现平台旋转,旋转角度最大320°。
2.3 升降功能
升降功能由牵引电机、滑轮、牵引绳、导轨等部件配合实现。牵引电机提供升降动力,牵引索绕过滑轮连接电机与载人平台,传递动力,电机正反转通过无线遥控实现沿升降导轨上下移动。导轨由两根间隔0.2m、长2m的绝缘杆组成,平台升降范围1.8m。
2.4 遥控功能
通过信号发射器将信号传输给接收器,接收器处理信号,对继电器开闭进行控制,进而控制电机正反转,实现作业平台的升降、旋转。为减少干扰,可利用高频锁码屏蔽元器件周围的电磁信号。
3 平台结构
本次设计的高空带电作业旋转平台结构,如图1所示。
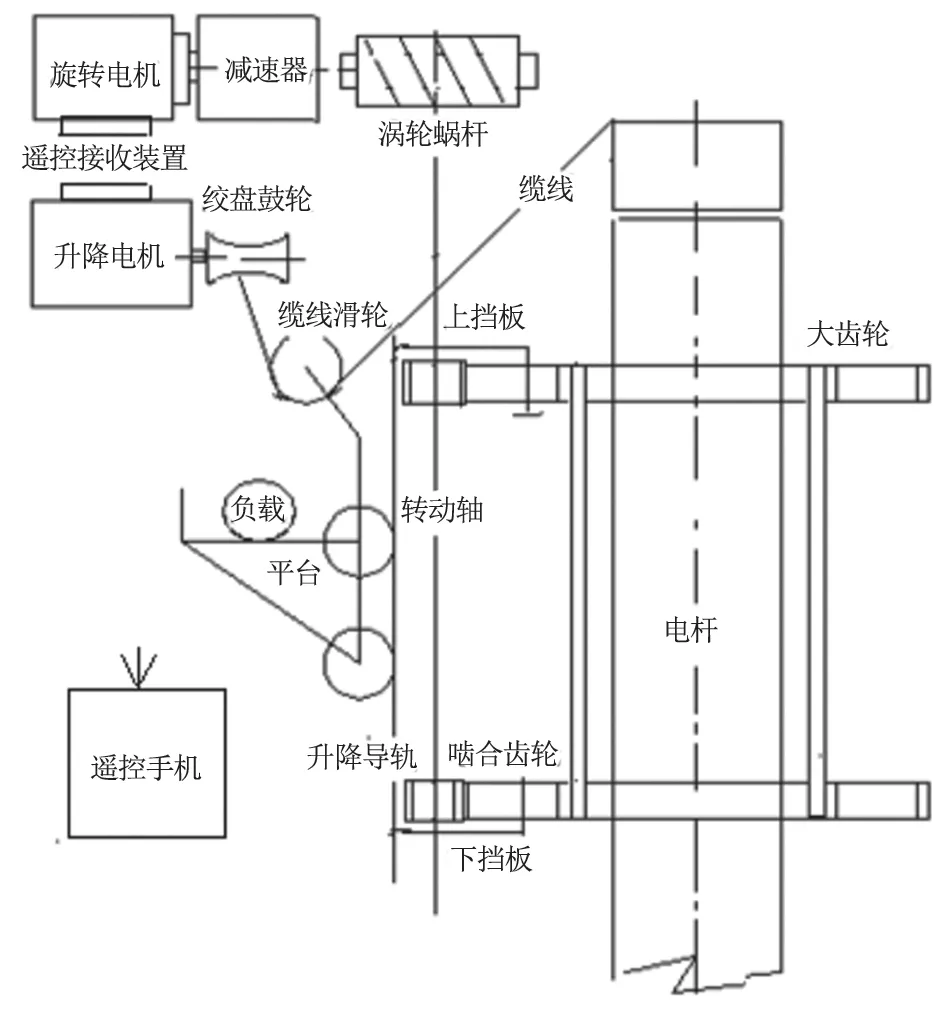
图1 高空带电作业升降旋转平台结构
从总体结构图,可以分析其工作过程主要有以下几个部分。
3.1 齿轮抱箍
作为该高空带电作业升降旋转平台的主要支撑部分,齿轮抱箍需要在使用前固定在电线杆上,其材质为铝合金,轻便结实。齿轮抱箍包含底部齿轮盘和顶部齿轮盘,通过四根长度相等的金属棒连接成一个整体,底部齿轮盘、顶部齿轮盘通过底部搭扣、顶部搭扣连接,组装完成的抱箍齿轮可以通过搭扣分合。抱箍齿轮与电线杆之间通过带有橡胶头的螺栓固定,在增加两者之间摩擦力的同时,还可以防止抱箍齿轮转动时刮伤电线杆,此外,通过调节螺栓可以改变齿轮抱箍的大小,实现在直径190~320mm范围的调整,可以适合多种直径的电线杆,提高平台的适用性。
载人平台的导轨可以通过齿轮与抱箍连接,为确保作业平台的顺利升降,采用搭板形式,不仅结构稳定性好,还可以有效降低载人平台的旋转阻力,但因为存在搭口,因此,限制一定的旋转角度,整个平台的旋转角度范围在0°~320°。
3.2 传动系统
该作业平台传动方式为齿轮传动,抱箍的齿轮在电线杆上固定不动,导轨则借助搭板与齿轮连接,通过与抱箍齿轮啮合将电机动力传递到抱箍齿轮,从而带动载人平台旋转。平台旋转的过程中,可遥控直流旋转电机进行旋转,通过减速器将动力传递到导轨上的齿轮,使得导轨带着载人平台以抱箍为中心旋转,旋转速度最高为180°/min。平台的升降同样由牵引电机提供驱动力,设计额定拉力1473kg,通过遥控牵引电机驱动与其连接的滑轮,使牵引绳运动,带动平台升降。在组装作业平台时,应设置牵引电机处于空档状态,再将滑轮设置为制动状态,然后将牵引绳绕过滑轮,并固定在电杆上,通过遥控启动牵引电机,驱动牵引绳将载人平台升至指定高度,平台上升时,需有专人协助确保载人平台稳定上升。作业平台组装好后,带电作业人员可以进入载人平台,然后紧固相应的紧固件,控制牵引电机带动载人平台沿导轨移动,设计负重180kg时,平台牵引速度为2.5m/min。
3.3 导轨及平台
导轨是由两根1.8m等长、间距0.5m的平行绝缘杆构成,载人平台借助滑块与导轨连接,滑块之间间隔0.5m。在滑块内设置滑轮,滑轮嵌入导轨,起到减少摩擦的作用。载人平台移动时会和导轨之间形成力偶矩,即小滑轮和水平方向存在斜角。在力偶矩作用下,滑块、导轨之间的连接更加稳定。根据带电作业现场实际情况,本次设计的作业平台导轨尾部进行模块化处理,可以通过更换不同的内嵌模块增设导轨,增加导轨长度,从而增加载人平台的升降高度。
4 控制系统设计
4.1 控制原理
机械结构是作业平台的骨架,控制系统则是作业平台的大脑,该平台的控制系统构成见图2。根据图可知,本次设计的控制系统属于闭环控制系统。当平台进行旋转动作时,控制系统可以基于位置传感器发送的位置信息建立控制闭环,对电机运行范围进行精确控制,从而控制平台的旋转角度。
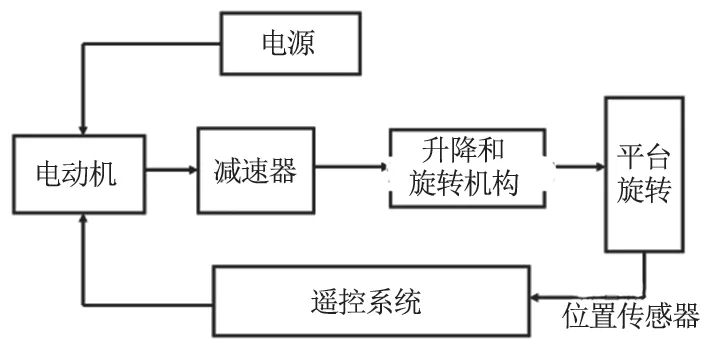
图2 高空带电作业升降旋转控制系统
因为平台旋转角度范围较大,旋转位置偏差可通过操作人员进行纠正,没必要进行更加复杂的闭环控制设计,只需控制电机旋转至一定位置时可以立即停止旋转即可,否则,可能出现平台旋转超出抱箍齿轮空间限制,导致作业平台故障,甚至引发安全事故。为此,本次设计通过位置开关进行控制,当电机旋转到规定位置时,位置开关将自动断开电机电源,确保电机停转。
4.2 控制电路
在控制平台升降和平台旋转时,控制方式有所不同,因而驱动力矩也有所不同,因此,升降电机、旋转电机的型号、参数也不同。为确保电机之间的协调动作,确保平台运行安全,可采取互锁控制方案,即当其中一个电机运行时,另一个电机就一定不能运行,从而防止两台电机的相互干扰。为此,本文设计了专门控制电机旋转的控制电路,对电机的正反旋转进行精确控制,为确保电机启停的控制,本次设计通过继电器控制方式实现,控制电路,如图3所示。
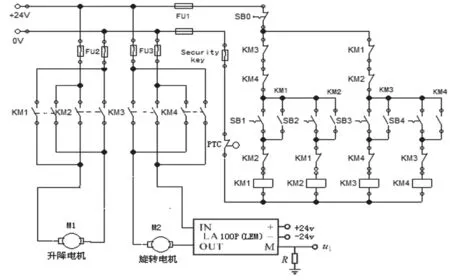
图3 控制电路设计
图3 左半部分为主控制电路,右边为电机控制电路。因为平台升降频率较低,升降电机启停次数较少,因此,其电机性能要求不高,可以通过继电器KM1、KM2与+24V直流电源直连,借助启动按键SB1控制启动,KM2、KM3、KM4失电,从而KM1触点常闭自锁,升降电机连接+24V电源,电源驱动电机正转,牵引绳回收,带动载人平台上升。如按停止键SB0,此时,直流电机停转,滚轮自锁。同理,继电器KM2也可以控制升降电机的反转,即载人平台的下降控制。
继电器KM3/KM4负责控制旋转电机,KM3控制电机正转,KM4控制电机反转,但平台旋转频率较高,为保证电机正常运行,采用LA-100P电流霍尔传感器检测电流,当检测电流超过阈值时,单片机控制电路断开、电机停转。
5 结语
综上所述,随着社会经济的不断发展、人民生活水平的提高,大众对供电质量的要求也不断提升,传统的带电作业方式无法满足要求。因此,必须积极运用更加高效的带电作业方法以及作业平台,以更好地保障电力检修维护工作。本次设计的高空带电升降旋转作业平台可以适应野外、沟壑等复杂环境,可以有效代替斗臂车进行带电作业,弥补斗臂车难以适应野外作业的不足,而且该平台成本较低,维护保养便捷、占地面积小,具有良好的社会经济效益。
