浅谈输电线路巡检中智能机器人的应用
2023-02-13陈文栋刘兴华牛丙震张晓刘宏光段立进
陈文栋,刘兴华,牛丙震,张晓,刘宏光,段立进
(国网山东省电力公司淄博供电公司,山东 淄博 255200)
在行业现代化发展的今天,输电线路巡检不能再局限在传统的工作模式下,而应该积极将崭新的技术应用起来,如智能机器人,通过智能机器人的使用,可实现巡检的自动化、智能化。很多地区的输电线路巡检中,智能机器人的应用取得了显著的成效,随着机器人研究的增多,智能机器人的功能越发完善,在未来必将在输电线路巡检中得到更广泛的使用。
1 当前电网巡检方式
在电力工程领域,输电线路巡检是重点性的工作,就现阶段的巡线方式来看,包含地面目测法、航测法和机器人巡检法几种,但这几种方式相比较,地面目测法和航测法因为固有的工作模式限制,在具体的应用过程中还存在着一定的问题。首先,以地面目测法为例,在这种方式下,需利用人的肉眼对辖区内的输电线路实施观测,由于输电线路的分布复杂,面临的环境条件恶劣,巡检工作量大,需投入大量的巡检人员,才能够完成巡检工作,且耗时长,一些巡检工人还需翻山越岭、涉水过河,工作效率低且可靠性不足。其次,以无人机航测法为例,在这种方式下,包含有直升机、无人机巡检的方式,如果在输电线路巡检的过程中采用的是无人机巡检的方法,无人机一般会与线路保持一定的距离,而这大大降低了巡检精度,总体来看,无人机巡检时有安全距离要求且巡航时间短,直升机巡检同样有距离要求,且在巡检时往往会受到天气因素的干扰,如果天气条件相对恶劣,将无法开展巡检工作,且利用航测法开展的巡检工作,成本消耗较高。最后,机器人巡检方式可克服前两种巡检方式的弊端,通过智能机器人的配置,可精准识别故障。
2 智能机器人特点及构成
信息时代到来后,关于机器人领域的研究越来越多,各种智能化技术为机器人提供了技术支持。就现阶段市场上的智能机器人来看,在物联网条件下可达到远程控制的目标,在大数据支持下,机器人中包含有智能自学习系统、任务模块和智慧电源系统,在利用这一机器人开展输电线路巡检时,可直接将其悬挂在线路上实施巡检,巡检的过程中可在物联网条件下将所采集的数据传输到大数据中心,而数据中心接收到了数据后,可开展对应的处理,经由网络条件,有关人员可利用电脑终端,对智能机器人开展实时监测与远程控制。
2.1 物联网下的高效远程控制
智能机器人独有的功能特点和技术优势,决定了其在输电线路巡检方面具有极高的便捷性,利用智能机器人可由机器人自动巡检,巡检的过程同步采集了信息,在移动网络条件下,这些信息可实时上传到后台数据中心,在此中心自动存储。由于智能机器人在巡检时承担了大部分的任务,机器人的运行情况关乎巡检工作能否顺利开展,就需总控中心实时监控机器人的运行状态。但利用智能机器人所巡检到的故障,一些可利用智能机器人自动完成处理,但部分问题却需专业的维修人员深入现场加以处理,维修人员要掌握相应的信息,需利用PC端或者APP来实现。
2.2 灵活多变的任务模块
智能机器人系统内,包含有多个任务模块,各个任务模块在机器人的巡检中,承担着各自的职责,既存在一定的工作独立性,不同任务模块之间又保持着工作的协调性。根据实际经验,一般需包含更换金具维修、除冰、额外探测等多个模块,在具体巡检时,不同模块可发挥各自的作用。
2.3 智慧电源系统
智能机器人在工作时的动力由电池来完成,在机器人系统内,智慧电源系统为不可或缺的部分,可设计为双供电形式,在为带电线路运行条件时,为动线供电,并同步向锂电池充电,充电任务完成后才可停止充电;一旦系统运行到带故障线路时,由锂电池供电,这种电源系统的设计,可在智能机器人的运行需求,对供电加以调节,保障电池处于最佳的条件。
2.4 智能自学习系统
在利用智能机器人开展巡检任务时,机器人中的数据采集模块不仅可自动采集信息,更可保障这些数据的传输实时性,确保数据中心可接收到完整且准确的信息,由数据中心完成备份并开展相应的数据分析,依据对数据分析结果的掌握,在原有基础上调整机器程序,因为有通信系统的保障,即使机器人不返回总控中心,也可将这些程序指令发送给其他机器人,让他们在程序指令下安排工作。
2.5 动力部分和电气系统
在智能机器人中,动力部分和电气系统必不可少,在此部分包含有两个机械臂、V型轮轴承和驱动电机,机器人所采集的图像,可在高清广角摄像头支持下传输,即使为长距离传输,同样可高质量传输。在机器人的电气系统中,通信、传感、电磁屏蔽和缺陷检测是关键性的构成部分,对通信子系统来说,在有4G或者5G信号的情况下,可直接使用4G或者5G网络,对于一些偏远地方来说,可能面临信号缺失的问题,即使在一些特殊地段的信号较差或者完全无信号,也可利用沿线所架设的700MHz无线网络,满足机器人巡检时的通信条件要求。因为信息时代的到来,计算机信息技术得到了迅猛的发展,原有的通信条件暴露了诸多的弊端,可在通信系统内添加动线载波通信,构建更为完善且先进的通信网络。在传感子系统内,配备的现代化设备较多,如超高清4K可见光摄像机、红外摄像机、紫外摄像机、fpv图传系统,这些设备的配置,可实现数据的精准采集。而电气系统中的电磁防护子系统,则是为了减弱电磁干扰,使机器人在运行时可免受电磁干扰,为提高抗干扰能力,可使用屏蔽双绞线、瞬变二极管。缺陷检测子系统的配置,可在智能机器人的巡检工作中,实现对输电线路中锈蚀、缺失、移位、缺损问题的识别。
3 输电线路巡检中智能机器人的应用
3.1 自主越障
(1)自主越障需求分析。对于智能机器人来说,越障是一个难点,在当前的输电线路巡检中,机器人巡检路径为架空地线,通过对地线的改造和调整,智能机器人能够在线路上自由穿越和行驶。机器人在巡检中的运动包含2种路径:直线段和越障。越障就是机器人要通过杆塔,机器人自主爬坡和越障原理如图1所示。在爬坡过程中,重点要开展机器人的滚动打滑检测、控制,以通过对状态与环境的感知,选择最合适的爬坡策略,以达到机器人自适应爬坡的要求;在越障过程中,系统可自动对障碍物加以识别,根据识别结果来进行越障规划,确保在机器人越障的过程中,机器人的状态可得到有效的控制。
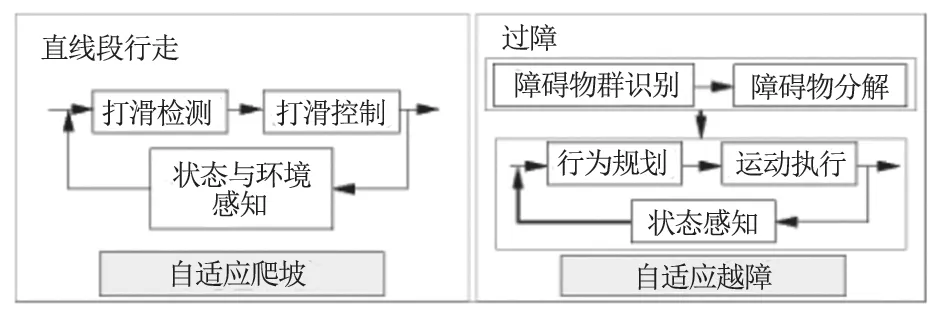
图1 自主爬坡及越障原理图
智能机器人在输电线路巡线中应用时,越障是机器人运行过程中需克服的一大难点,结合实际的巡检工作标准,防振锤、悬垂线夹、耐张杆塔塔头,是较为常见的障碍物,对于不同类型的障碍物来说,机器人内都应该有一套相对完整的越障动作,如果将各种障碍物组合起来,在机器人的越障设计中,严禁直接进行单一障碍物越障动作的叠加与串联,主要是因为机器人的运行是一个复杂且动态化的过程,随着运行状态的变化,越障动作序列也将同步发生一定的调整,在越障动作设计时,需开展对应的设计优化。
在自主越障设计过程中,可将杆塔和防振锤组合起来,开展越障设计,在这种统一的越障设计下,当机器人处于运行状态时,所面临的障碍物也就仅仅包含直线段和杆塔。
(2)面向对象的控制系统设计。控制系统的设计是智能机器人方面需关注的一个重点方面,为使机器人可以在运行和使用的过程中达到自主越障的目标,一般应有相对简化的架构,否则,一旦直接采用原先面向过程的架构方法,很难达到理想的设计效果。在面向对象的设计方式下,设计流程更为简单,且后续的维修和操作都相对便捷,设计人员将机器人作为整体要素,在该对象内配备有机构、云台摄像机、电机、传感器、通信部分,这些构成部分又由具有共同属性的部件抽象为同一类对象。机器人的运动过程中,各个机构对象之间的运动、消息之间存在着交互关系,有关人员在编程时,不需考虑底层的逻辑关系。在越障过程中,机构对象会依次根据自身的运动状态和结果,通知其他对象是否需要活动、什么时间活动,而对应的对象在接收了这些信息以后,可自动对机器人开展姿态检测,进而进行相应的动作。
3.2 自主定位
智能机器人在输电线路巡检中的应用,同样需具备自主定位的功能,在机器人中配备有云台设备,该设备的存在可辅助巡检任务的完成,此设备不具备自主识别和定位的作用。在机器人的自主定位过程中,需由机器人中的编码器、霍尔计数器、倾角传感器的相互配合来负责,在不同设备的相互协调下,可得到线路信息,算法支持下也就可掌握杆塔的具体位置信息,此信息为空间方面的信息,通过信息处理与转化,能得到高精度的坐标信息。
(1)杆塔定位。输电线路巡检中的智能机器人应用时,杆塔定位是重点性的工作,机器人在运行时,往往存在多个越障动作,在这些动作中,行走路径的坡度并非一成不变,通过坡度变化趋势的分析,也就可完成定位,原理如图2所示。以直线塔为研究对象,在智能机器人巡检的过程中,一旦机器人碰检防振锤,也就进入了杆塔的穿越环节。对于电力网络来说,架空线多为悬链线,机器人穿越时表现为上坡或者下坡两种状态。当碰检防振锤以后,自动完成坡度值的检测,在得到了坡度值的变化信息后,倾角传感器将返回,呈现正值向负值的变化状态,而在此过程中,中间过渡过程就是直线塔的原点,此点就是地线悬挂点。耐张杆塔与直线杆塔的定位方式一样,定位的适用性强,精度高。
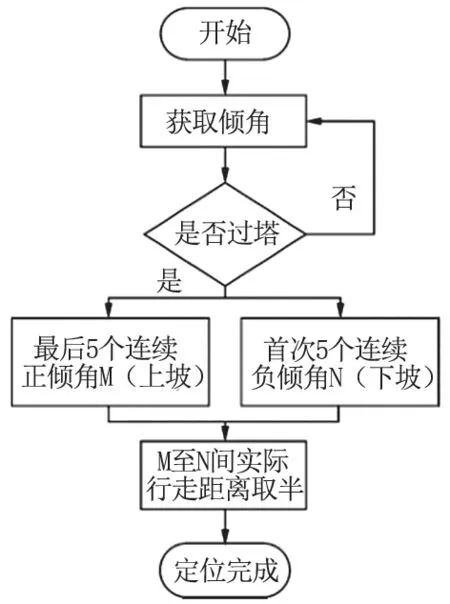
图2 杆塔定位原理
(2)地线定位。杆塔定位结束后需开展地线定位,在机器人的运行过程中,沿线竖直平面上,行走过程包含水平和竖直两个方向,此坐标系为机器人坐标系相对于杆塔坐标系的定位,技术思路与惯导系统相一致,机器人中的传感器,可获取相应的数据并同步实施专业化处理,在不同方向上积分后,也就可得到二维方向上的数据。
(3)机器人坐标变换。机器人坐标变换,是将杆塔上巡检点的坐标标注在机器人坐标系、云台坐标系上的过程,当机器人处于定点巡检状态时,机器人的双臂锁紧固于线上,经由定位过程,也就可得到机器人相对巡检目标点的空间位置信息,与此同时,也可得到自身倾角、摆角的信息,经由对这些信息的掌握,也就可确定在该时刻的位置信息,最后经由空间坐标变换转换到云台坐标系中。杆塔上目标点的信息将直接存储在机器人数据库中,在智能机器人对输电线路开展巡检时,可依据杆塔信息调用相应的数据库,从而将目标点信息转换到云台坐标系中。在云台得到了巡检目标点的信息后,机器人可更具运动本身的运动规则实施对应的变换,在此变换中,云台视场角中心应处于巡检目标点,也就可实现定点巡检。
3.3 自主故障诊断与复位
(1)机器人故障分类。智能机器人在用于输电线路巡检时,一旦机器人发生了故障,必然导致巡检工作无法正常开展。因此,对智能机器人来说,自主故障诊断和复位应该是关键的功能,依据对故障处理方法的区别,主要以自恢复故障、可替换故障、需修复故障为主。当出现了可自恢复故障时,机器人中的有关模块可自动排查故障;而可替换故障主要是机器人在出现了故障以后,能够自动采取替换方案,来减小故障所造成的危害;当机器人出现了需修复故障后,机器人一般无法正常使用,需停止巡检工作由人工处理机器人的故障。
(2)机械故障诊断与修复。在智能机器人使用中,机械故障相对常见,这类型故障多表现为机械传动部件之间的约束,这种约束下,机构无法正常使用。当驱动单元驱动展臂机构运动时,智能机器人检测到的驱动器反馈计数,不呈线性变化关系,未产生传感器限位信号,当出现了这一方面的表现后,意味着机器人展臂机构被锁死,在检测到了这一方面的故障后,控制系统停止运行,应由专人来处理。
4 结语
智能机器人在输电线路巡检中有着多方面的优势,为保障巡检工作的高效开展,在实际的巡检中,需配备智能机器人,用智能化巡检取代人工巡检。未来的工作中,需加大对智能巡检机器人的研究,保障智能巡检机器人的性能和功能。
