惯导陀螺仪在管道探测的应用及前景分析
2023-02-11谭伟巨
谭伟巨
广东中冶地理信息股份有限公司 广东 东莞 523000
1 引言
伴随国内科技水平和管道探测定位需求的不断提高,惯导陀螺仪探测定位技术应运而生。惯导陀螺仪探测技术的应用,弥补了传统管道探测定位法的缺陷和不足之处,提高了探测定位精准度和效率,在管线探测、航天工程、地质勘探等领域均有应用[1]。所以,研究地下管道监测定位中惯导陀螺仪应用,存在着一定的现实意义。
2 传统地下管线定位技术遇到的挑战
1、对实际的测量深度有较大影响,因为很难在实际埋设深度>5米以上的情况下,准确测定地下管道的安装情况和深度,容易受到实际探测条件背景的电磁干扰影响[2]。2、电磁感应法管线仪、探地雷达、声波探测仪等不完全满足城市地下空间开发的需要。3、非开挖等施工的特殊性地形障碍(过河、过铁路、建筑物)。
3 陀螺仪原理介绍
3.1 陀螺仪的概念
陀螺仪的基本原理:被转动物的旋转轴指向的方位在不受外力作用下,是不能变化的。就按照这种原理,用它来保持运动方向,生产起来的物体就叫做陀螺仪(gyroscope)[3]。
由三个罗盘和三个加速度仪组成的方位测量仪控制系统(OMU)是主要检测设备,分别检测定位仪的相对惯性中的三个旋转角速度和三条直线加速度的定位仪坐标系的分量,并进行方位转换,将加速度数据转换为导航方位坐标控制系统的速率。并检测出定位仪的地点、高度、运动方向和水平位置。陀螺仪则根据测定水平角(Heading),俯视角(Pitch)和侧滚方位(Roll)的变化规律,从而判断惯性定位设备的工作状态。
3.2 陀螺仪进行管线定位的原理
陀螺仪和加速度计依次检测定位仪的相应于惯性空间的三次自转角速度和三次线加速率延定位方向仪坐标系上的矢量,并进行位置转换,将加速度信号转换为延导航坐标系的线加速率。从而测算出定位仪的方位、时速、航向,以及水平姿态[4]。
例如:将北向加速度计和东向加速度计测得的运动加速度aN、aE进行一次积分,与北、东向初始速度VN0、VE0得到定位仪的速度分量,
既:
将速度V北和V东进行变换并再次积分得到定位仪的位置变化量,与初始经纬坐标相加,即得到定位仪的地理位置经纬坐标。
几种常用的坐标系:惯性坐标系、地球坐标系、地理坐标系、载体坐标系、陀螺坐标系、动参考坐标系。
4 惯导陀螺仪的组成
1、硬件系统:由测量单元和行进部分组成。其中方向测量仪器(OMU)系统是惯导陀螺仪最主要的构件,其为包括除了计程仪(通常用于方向计量器之上)以外的各种感应器。2、软件系统:用来对测量单位所收集的数据进行处理计算,并得到点坐标系和管线空间图形信息图[5]。这些软件程序把由方位测量仪所独立测量的数值从方位测量仪器中传送至电脑,然后再把方向测量仪器所经路线与已知的出入口点位置系统相互联系,最后再从所选的位置系统中建立一条更精确的三维曲线。
5 惯导陀螺仪技术特点
陀螺仪三维精确定位技术作为新的地下管线定位方法,具有以下技术特点:
1、测量过程不受海拔影响,不受深度影响,也不受电磁干扰;2、定位精度高;3、适合于任何材质的地下管道;4、自主创建三维空间曲面图,并与GIS数据融合[6]。5、陀螺仪三维精密定位工艺,可成为管线定位仪、GPR探地雷达技术、CCTV摄像系统技术等传统测量方法的强力弥补工具,对于解决问题精密位置大埋深地下管道问题具有很大意义。
6 惯导陀螺仪在管道探测中的应用实例
某附近城市机场的燃气管道穿越施工虽已经建成并已通气运行,但其管道顶管施工时必须在紧挨燃气管道的地方进行沉井桩基施工,因为穿越施工的基础计算准确性较小,而且准确性也较差,无法作为放样的数据。为保证燃气管道的正常运作和安全,在这以前,以往通常的做法是敷设临时管,如果管道被损坏,则在污水顶管施工完成后重新穿越一条燃气管。这样的结果是带来了重大的经济损失。还好现在我们有了更好的选择,那就是对原有的燃气管道进行三维管道轨迹测量。
6.1 技术难点
该管道的测量涉及许多复杂的流程。以燃气管道为例,在开始测量之前,需要办理停气通告和手续,割管前进行氮气置换,割管、穿绳、重新镶接等等工序,耗时、耗力,同时代价很高。所以建议在新管道穿越施工完成的时候立即进行测量工作
6.2 硬件选取
主要硬件:惯导陀螺仪、全站仪、计算机
惯导陀螺仪:由保护盒、惯性测量棒、工作计算机、控制台等几部分构成。
6.3 技术实施方案
技术实施方案为:1、实施之前,应做好数据采集与计算工作,获取待测区域的位置图,并计算待测管道入、出的三维坐标值。如作业点位于沙井内,进沙井时应进行抽水或通气,并按照缺氧的环境守则进行操作。2、在进行试通操作时,先将惯性定位器放入待测管道入口处,然后启动惯导陀螺仪,并在入口停止仪器约三十秒钟后在出口处用机械或人工方式进行拉带。随着仪器在管道内检测,传感器即时记下惯导陀螺仪运动的时间,以及路径中的位移与轨迹位置的变动情况。拖至出口处亦须静止三十秒钟,此时开始进行一次检测工作,于此重复检测两次以上得出最准确之结果[7]。
6.4 数据处理
1、数据处理
探测工作结束后,需要使用专门数据处理系统软件对测量信息加以运算处理。先将惯导陀螺仪的测量信息下发至工作计算机上,接着将测量管道的开始位置和末端位置注入软件系统中,并选定相应的数据位置,然后就可以得到管道的定位信息资料。通过处理获得的资料确定该资料是否有效,若未满足要求,则须再次展开测量工作,直到获得最准确的结果。待获得较准确的结果时,保存本次资料的有关信息,在配合测量获取之现场地形图及测绘程序中完成管线数据编制、套绘。
2、数据输出
1)数据类型:XYZ三维空间坐标。2)标准文件格式:.csv文件、.csr文件。3)最大测量深度:无限制;或0-1000米。4)测量精度:0.25%*管长。5)弯曲半径:300D。6)管道材质:钢管。
3、探测成果精度如下
平面精度:±0.25%*L=±0.25%×68.076=±0.170m<0.1h
高程精度:±0.10%*L=±0.10%×68.076=±0.068m<0.15h
6.5 探测结果分析
在惯导陀螺仪提供的测量数据支持下,污水顶管沉井桩基施工顺利结束,燃气管道完好无损,证明了RUDUCT陀螺仪的准确性和可靠性。惯性陀螺管内直接测量法提供的数据具有精度高、数据可靠稳定,从而确定了惯导陀螺仪在深部管线测量方面的强大技术优势和应用前景。
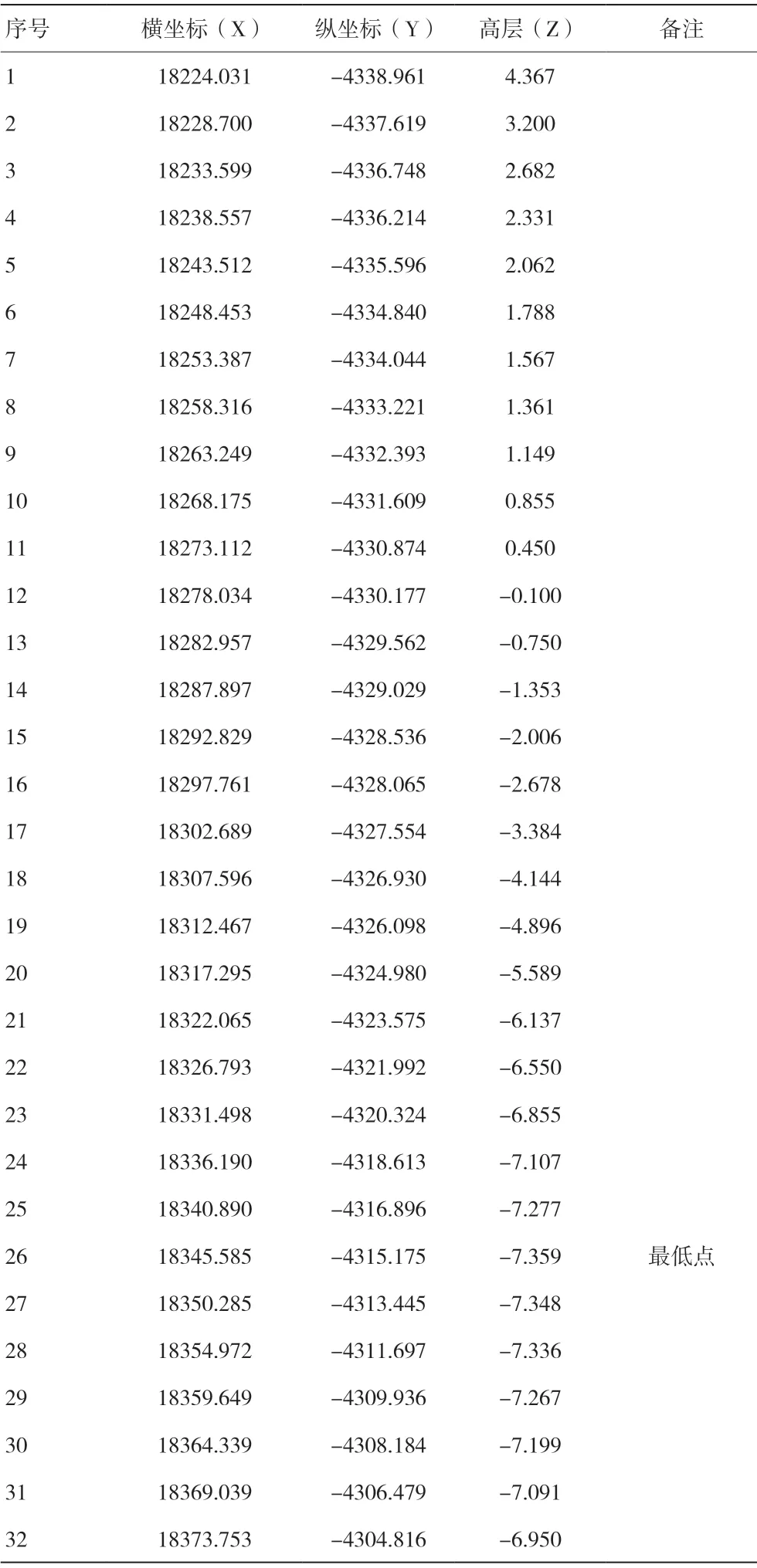
表1 天然气管道穿越工程坐标表
7 惯导陀螺仪的前景分析
1、管道三维姿态测量
目前,现有的管网及井室检测技术,包括有地面检测和地下检测两个方向,但都存在误差大,人员操作要求高,实用性不强等确定。管道三维位置测量仪技术,可获得未施工穿越管线施工管道的精确定位数据,科学合理的开发利用地下空间,减少潜在的事故隐患,进而攻克上述其他检测方法无法破解的实际难题。需要注意的是,在实际应用中,由于管道三维姿态测量仪是基于精确测量自身运动轨迹而求得所测管道中心坐标序列的原理,其测量准确度不止受限于内置的核心惯性传感器测量单元,也与仪器运行过程中结构稳定性息息相关。因此,保持测量管道的结构稳定,也是三维姿态测量仪测的准确数据的先决条件之一。以上便是传感器基于惯性测量单元,即IMU惯性传感器技术的测量仪器——管道三维姿态测量仪的原理与应用了。
2、开发管线探测惯性导航系统
对于海底管道或途经土壤含水量较大地区的管道,由于海洋环境、浅层建筑地貌、水底地形等都非常复杂,且海洋板块极不平衡,容易引起地形变,从而无法形成实时的地理信息系统。检测设备如果不记录其周围位置和敷设路径,就无法对管线检测设备产生缺陷的准确定位。为解决此类问题,可以开发管线探测惯性导航系统。
通过优选加速度计和陀螺仪所构成的惯性控制系统的硬件构成;同时在解算算法中通过引入互补信号滤波和扩展自适应卡尔曼滤波使偏差范围明显减小,从而有效提升了管线轨迹测量准确度。整体结构上完备了整套测试体系。其主体构成主要由以负责方位角和距离信息收集的感应器为核心的下位机组成部分,和以实现串口方式通讯和数据处理解算功能的上位机组成部分。其中下位机方面,在实现了控制系统的基本机械结构设计和信息遴选的技术理论基础上,以STM32F103型单片微式电子计算机为控制系统的指令控制系统核心,实现了数据采集、数据保存、数据传递等全过程操作,同时实现了加速度仪和光纤陀螺仪的信号控制和数据收集等功能。配套单元有电力管理和模数转换控制器等。在上位机方面,以LabVIEW平台实现了对一个界面和串口读写控制系统的编程开发工作,并采用matlab脚本的方法实现了轨迹坐标解算和误差修正算法的代码编制调试工作。故此惯性导航系统具有不依赖外界信息,探测精度高,隐蔽性好等特点。
3、开发惯导测绘自动化机器人
目前陀螺仪在管道探测中还存在几个问题,对作业管道要求相对比较高,对于某些管道,还需做到小型化,以使用不同管线规格的需求。
可通过自动化技术开发,研制惯导测量自动化机器人,测量自动机器人通过搭载的精密惯性检测模块,可以精确测量管线的三维方向,同时利用收线装置可以将其在管线中进行拖拽测量,在管线中没有GPS定位系统的状况下可以精确测量出地下管道的路径,从而形成了三维图。同时通过惯性测量模块自带主动判断处理功能,以加强系统稳定运行设备。并设计了按照管道尺寸,随意改变各种规格的滑轮组件,以适应地顶水管、工业管网以及管道较长、管路内障碍物较少、管路坡度大的地下管线。
8 结论
惯导陀螺仪的定位系统都具备了自动检测的特性,不需人员可以随时随地对测量对象进行设定,而且,这些测量的抗干扰能力都特别好,并且能够在相对较差的天气、不方便的交通、照明情况不好的情况下完成工作,可以进行24小时内不间断的测量。但由于惯导陀螺仪在管道中采用的直接测量方法,所以它直接通过管道,从而更适合于检测新建的非运行管道。对现有的运行线路,应当留有空管以进行检测。如有的线路因淤泥堵塞而不能通过,也无法检测。
惯导陀螺仪的3D检测技术在不受线路质量,线路地埋深度,施工条件和地质环境等各种因素的影响,特别是非开挖或定向铺设的线路中,利用惯导陀螺仪所检测的准确三维位置结果,为整个线路的维护与控制过程提供了准确可信的数据。
