机器人辅助单体位和双体位斜外侧腰椎椎间融合内固定术疗效比较
2023-02-10房彦名袁强韩晓光何达田伟
房彦名,袁强,韩晓光,何达,田伟*
(1.北京大学第四临床医学院,北京 100035;2.北京积水潭医院脊柱外科,北京 100035)
1944年,Briggs和Milligan首次开展腰椎椎间融合术治疗不稳定、狭窄和畸形等腰椎退行性疾病[1-2]。但由于手术过程中过多的组织损伤常常导致患者术后腰部麻木、疼痛、僵硬难以忍受。随着微创手术的进步,医生和患者已不再满足于创伤过大的后路腰椎椎间融合术。因此,为最大限度地减少手术中肌肉和软组织的损伤,侵入性较小的斜外侧腰椎椎间融合术(oblique lumbar interbody fusion,OLIF)逐步发展并成为治疗腰椎退行性疾病的一种重要的手术方法[3-5]。与传统的脊柱融合技术相比,斜外侧入路可以减少背部肌肉韧带的破坏,维持背部力量。同时还可以放置更大的椎间植入物,有效地恢复节段序列和椎间孔高度[6]。目前,运用OLIF手术治疗脊柱疾病的外科医生数量以每年10%的速度迅速增加。经典的OLIF方法是手术过程中患者侧卧位,于腹部侧面做一个切口,小心分离软组织以到达腰椎进行减压,同时放置骨移植物或合适的垫片进行椎体融合,然后俯卧位进行后路椎弓根螺钉置入用于额外的支撑。整个手术过程中,患者在麻醉情况下进行一次由侧卧位向俯卧位的体位变换。变换体位消耗额外的手术时间,同时需要对手术区域重新消毒,这会增加麻醉相关和手术时间延长可能导致的并发症的费用。为提高手术效率,Blizzard等[7]于2018年报道了CT引导下侧卧位单一体位下分步进行脊柱减压及椎弓根螺钉内固定术。Tanaka[8]提出了一种手术导航引导下同步进行OLIF及经皮椎弓根螺钉置入术式。文献表明同时置入Cage和螺钉可显著减少手术时间和辐射暴露[9]。此后,图像引导下单体位OLIF联合椎弓根螺钉内固定的研究逐渐完善[10]。随着骨科机器人的出现和发展,单体位OLIF手术进入新的阶段。2020年,Huntsman等[11]报道机器人引导下单体位外侧腰椎椎间融合手术效果。自此,外科医生开始逐步探索机器人辅助下单体位进行OLIF和椎弓根螺钉内固定手术[12-14]。目前,对机器人辅助下单体位进行OLIF和椎弓根螺钉内固定手术的临床效果研究尚不充分,缺乏比较单体位和双体位两种方式的临床研究。
本研究回顾性收集了2018年7月至2021年9月在北京积水潭医院接受机器人辅助下行单体位OLIF和椎弓根螺钉内固定的12例患者,同时通过匹配年龄、性别、身体质量指数(body mass index,BMI)和手术节段纳入24例变换体位(双体位)下行机器人辅助下OLIF和椎弓根螺钉内固定患者,通过收集并分析两组患者的人口学特征、围手术期指标及螺钉置入参数,比较机器人辅助下OLIF和椎弓根螺钉内固定在单体位手术和双体位手术中的临床效果,为进一步研究奠定基础。
1 资料与方法
1.1 纳入与排除标准 纳入标准:(1)患者于北京积水潭医院行机器人辅助下OLIF合并椎弓根螺钉内固定治疗;(2)患者由同一术者实施手术;(3)患者具有完整病历资料及手术前后影像资料。排除标准:(1)患者年龄<18岁;(2)患者既往接受过脊柱手术;(3)患者有肿瘤或结核病史;(4)患者有身体其他部位创伤;(5)患者合并严重骨质疏松患者(骨密度T值≤-2.5 SD)。
1.2 一般资料 根据纳入和排除标准,本研究共纳入2018年7月至2021年9月的36例患者。其中由单一术者行天玑骨科手术机器人系统辅助下单体位OLIF合并椎弓根螺钉内固定手术患者12例。按照1︰2匹配比例年龄、性别、BMI和手术节段,共纳入机器人辅助下双体位OLIF合并椎弓根螺钉内固定患者24例。36例患者中男性12例,女性24例;平均年龄(59.39±7.97)岁;BMI为(25.30±3.69) kg/m2;单节段患者33例,双节段患者3例。将患者分为单体位组和变换体位组(双体位组)两个组,单体位组12例,其中男性4例,女性8例;平均年龄(59.17±8.72)岁;BMI为(24.48±4.32) kg/m2。双体位组24例,其中男性8例,女性16例;平均年龄(59.50±7.76)岁;BMI为(25.71±3.35) kg/m2。本研究经医院伦理委员会批准。
1.3 手术方法 所有手术步骤均由同一位脊柱外科医师进行。患者取单侧卧位,气管插管麻醉充分后使用C型臂定位手术节段。单体位组消毒铺单预留后路行螺钉内固定范围,术前患者体位摆放时患者背部位置应距手术台边缘10~15 cm。双体位组按常规步骤消毒铺单。外科医生首先进行了OLIF手术。从腹部外侧前投影切出一个平行于髂骨的5 cm斜切口。然后逐层切开皮肤和皮下组织,钝性分离腹外、内斜肌及横肌。示指钝性分离探查至腰大肌前缘并推开髂血管[15]。置入导针,C型臂透视确定椎间盘前1/3,将微创牵开器沿导针插入,连接光源确认无出血。用刀切开纤维环,然后切除相应的椎间盘和韧带。用牵开器打开椎间隙并插入试验模型。用生理盐水冲洗椎间隙并将Cage置入椎间隙。在逐层缝合皮下组织和皮肤之前,确定Cage大小和位置并清洗伤口。在单体位手术中,在预留的消毒范围行后路螺钉内固定。首先将机器人导航系统放置在患者外侧,将示踪器通过小皮肤切口固定在髂骨上,助手使用C型臂确定手术节段并获取图像信息,术者行腰部小切口,通过机器人操作系统规划螺钉长度、直径、角度和轨迹并完成螺钉置入和杆固定,确认螺钉位置无误后缝合伤口。双体位手术时,变换患者体位为俯卧位,重新消毒铺无菌单。在腰部切开皮肤和皮下组织,将示踪器固定在手术节段上一节段的棘突上,然后使用C型臂确定操作区域并获取图像信息,采用相同的手术方式置入螺钉,透视确认螺钉位置无误后用生理盐水冲洗创面,逐层缝合(见图1)。

a 椎管减压 b 皮肤小切口 c 示踪器固定于髂骨
1.4 观测指标 本研究统计分析了患者的基本人口统计学特征,即性别、年龄、BMI、手术节段和围手术期结局即手术时间、术中失血量、辐照次数、术后住院时间和计划外二次手术。根据手术前后CT结果,我们对上位椎间盘高度、腰椎前凸角、手术节段椎间孔高度、小关节侵犯、螺钉偏离距离(实际轨迹偏离设计轨迹的距离)、螺钉安全等级进行了测量。Gertzbein和Robbins量表[16]用于评估螺钉安全等级,A级:螺钉完全在椎弓根内;B级:螺钉穿过椎弓根皮质的距离<2 mm;C级:螺钉穿过椎弓根皮质的距离≥2 mm且<4 mm;D级:螺钉穿透椎弓根皮质的距离≥4 mm且<6 mm;E级:螺钉穿过椎弓根皮质的距离>6 mm。计算螺钉放置的可接受率:(A级螺钉数量+B级螺钉数量)/螺钉总数×100%。

2 结 果
2.1 围手术期指标 单体位组辐照次数12(10,14)次,低于双体位组14(12,14)次,差异具有统计学差异(P=0.038)。36例患者总体手术时间为222.5(180,240) min,术中出血100(75,200) mL,术后住院5(3.5,5.0) d,术中辐照14(12,14)次。两组手术时间、失血量和术后住院时间比较,差异无统计学意义(P>0.05)。两组均未出现非计划的二次手术(见表1)。
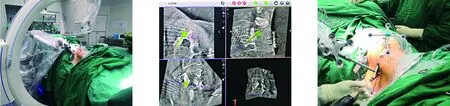
d 机器人系统进行图像采集 e 螺钉置入规划 f 置入螺钉

表1 人口学数据及围手术期评价指标
2.2 影像学指标 两组间术前及术后手术节段上段椎间盘高度、腰椎前凸角、椎间孔高度比较,差异均无统计学意义(P>0.05)。而两组组内术后手术节段的椎间孔高度较术前均增加(见表2)。
表2 不同体位手术前后影像学资料比较
2.3 螺钉置入效果评价 单体位组螺钉偏差为0.75(0.66,1.00) mm,双体位组为0.72(0.43,1.04) mm,两组比较差异无统计学意义(P>0.05)。进一步分析单体位组患者着力侧(靠近手术台侧)和对应侧(远离手术台侧)螺钉偏移距离,远离手术台侧螺钉偏差为0.73(0.55,0.91) mm,靠近手术台侧螺钉偏差为0.79(0.66,1.23) mm。虽然着力侧螺钉、对应侧螺钉和双体位组螺钉偏移距离比较差异无统计学意义(P>0.05),但结果显示患者着力侧螺钉的偏差相对较大。螺钉安全等级方面,单体位组A级螺钉47枚,B级螺钉2枚,C级螺钉1枚,螺钉可接受率为98%。双体位组A级螺钉91枚,B级螺钉6枚,C级螺钉3枚,螺钉可接受率为97%。单体位组3枚螺钉穿透皮质,其中1枚位于椎弓根头侧壁,1枚位于椎弓根外侧壁,1枚位于椎弓根内侧壁。双体位组9枚螺钉突破了皮质。其中螺钉椎弓根头侧壁2枚,椎弓根外侧壁6枚,椎弓根内壁突破1枚。两组均未发现小关节侵犯。螺钉置入安全等级和皮质穿透位置的分布差异无统计学意义(P>0.05,见表3)。
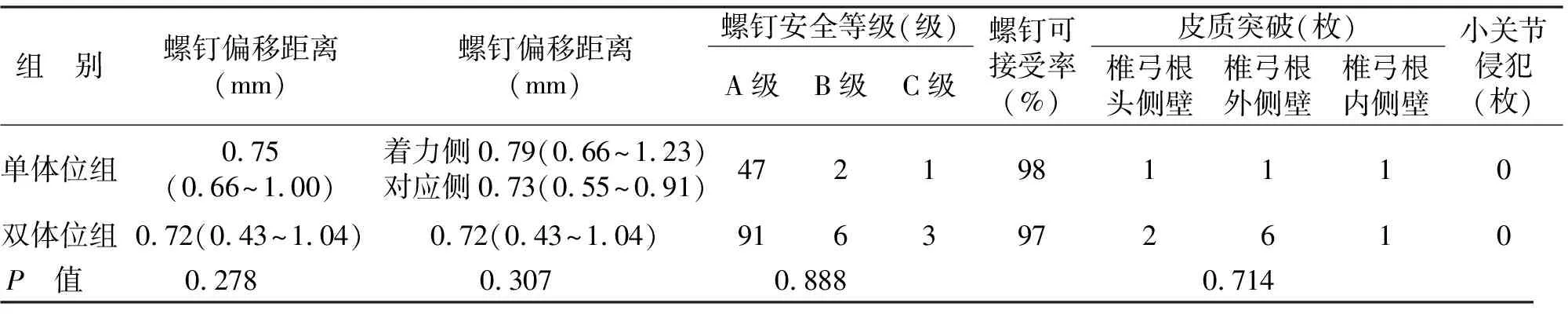
表3 螺钉置入效果评估
3 讨 论
OLIF联合椎弓根螺钉置入技术已成为治疗腰椎疾病安全有效的手术方法[8,17]。双体位OLIF合并后路椎弓根螺钉内固定手术中,体位变换有时会增加手术难度甚至发生麻醉事故[11]。随着骨科机器人技术的发展,椎管减压联合经皮螺钉置入可在一个体位实现,为OLIF手术的改进提供了可能。目前机器人辅助下OLIF合并单体位螺钉置入的研究比较缺乏,单体位能否在提高手术效率的同时维持安全性仍需探究。
本研究发现单体位组辐照次数低于双体位组(P<0.05)。两组手术时间、出血量及术后住院时间比较,差异无统计学意义(P>0.05)。其中,单体位组手术时间为215(195,293) min,双体位组手术时间为233(180,240) min。Ouchida等[9]报道的单体位OLIF和后路经皮螺钉置入的手术时间为(93.3±19.3) min,双体位组为(121.0±37.1) min。其手术室占用时间分别为(176.6±36.4) min和(272.4±42.7) min。Hiyama等[10]报告其放置Cage和椎弓根螺钉的时间为(87.9±25.1) min,其研究结果和本研究的差异可能是由于本研究采用的是从皮肤切开到手术结束的时间作为手术时间所导致。与上述研究导航引导的手术相比,机器人辅助手术需要更多的时间来进行术前图像扫描和配准。其次本研究是在OLIF手术完成后进行螺钉置入,也会导致时间相对于其他研究的延长。另外,其他几项关于OLIF手术时间的研究与我们的结果相似[18-19]。本研究结果显示单体位组和双体位组的手术时间没有差异,这可能与患者侧卧位时螺钉横向插入困难和机械臂位置的调整复杂有关。
单体位组和双体位组手术节段的椎间孔高度在术后均较术前有所增加(P<0.05)。这表明单体位组有比拟双体位组的间接椎管减压能力。有研究表明双体位组OLIF可使腰椎前凸角显著增加4°~10°[18-20],与本研究双体位组术后前凸角无明显改善的结果不同。而Hiyama等[10]报道单体位OLIF术后腰椎前凸较术前无明显变化(P<0.05)。这与本研究观察到的单体位组结果相同。笔者分析其差异可能由于以下原因导致:既往研究报道的OLIF可以显著改善腰椎前凸角纳入患者术前腰椎前凸角多为35°,术后角度在40°左右[18-20],而本研究中患者术前腰椎前凸角度约为40°,较大的术前腰椎前凸角度可能会导致术后改善不明显。此外,笔者比较发现单体位组患者着力侧(靠近手术台侧)和对应侧(远离手术台侧)螺钉偏移距离,与双体位组螺钉偏移距离差异无统计学意义(P>0.05),螺钉可接受率也保持在较高水平(两组分别为98%,97%),和既往研究报道的单体位组0.8%~2.0%,双体位组4%皮质突破率吻合[7,9-10]。这意味机器人辅助OLIF单体位手术与双体位手术具有同等的安全性和准确性。
本研究还有很多需要改进的地方。本研究样本量较小,需要前瞻性招募更多患者。同时需要细化手术过程中各部分操作对应的时间,以明确哪一步影响手术效率。我们将努力收集由同一术者执行的机器人辅助OLIF合并螺钉置入病例数据,为未来提高工作效率构建基础。
机器人辅助OLIF单体位手术与变换体位手术具有同等的安全性和准确性。单体位手术可以减少手术辐照次数,提高椎间孔高度,但无法减少手术时间和失血量。
