基于有缆遥控水下机器人的水电站检测方法
2023-02-10邹金明
邹金明
(福建仙游九鲤湖建设管理委员会,福建 莆田 351200)
0 引言
水下机器人(UUV)在海洋科学研究、海洋工程等领域已经得到了广泛应用,其可分为自主水下机器人(AUV)和有缆遥控水下机器人(ROV)。21世纪开始,AUV 技术得到了进一步发展,涌现出产品化AUV 的商业公司,包括美国Hydroid 公司的Bluefin 系列、挪威Kongsberg 公司的REMUS系列、美国Teledyne 公司的Gavia 系列等,标志着AUV 进入了大规模应用阶段[1]。虽然AUV 可自带动力源并自主航行,但在水下作业时间、作业能力、数据实时传输性等方面能力有限。ROV 依靠脐带电缆提供动力源,具有水下作业时间长、数据实时传输快等特点,但是遥控电缆限制了作业范围[2]。相比海基工程的水下检测工作,陆基水利水电工程的水下检测工作并不需要较大作业范围。ROV 自身携带多波束测深技术可以获得局部水下待测目标的高精度地形地貌信息,经过计算可对水下结构特征部位进行定量分析,并通过水下高像素摄像机,对水下结构进行全方位连续的拍照和录像,为水下检测工作提供可视化分析数据[3]。世界上已经有近百家ROV 制造厂商,ROV 的使用量仍然保持着强劲的增长势头,其中美国、加拿大等国家在ROV 研发制造领域处于领先地位,同时占据了绝大部分的商业市场份额[4]。
目前,ROV 已经成功应用于乌江渡水电站、三峡水利枢纽导流底孔封堵检修门[5]、仙游金钟水库大坝[6]、望虞河望亭水利枢纽工作闸门[7]、三渡溪水库[8]、金鸡拦河闸重建工程[9]等水利水电工程的水下结构检测工作。本文将ROV 应用于福建三明市某水电站的水下检测工作,通过定性化图像分析和评估了水下结构的具体状况,将为水电站工程日常运行维护以及缺陷修复提供详细的基础数据。
1 检测方法
水电站水下结构检测工作采用了SeaBotix LBV300-5 小型遥控水下机器人,见图1。这一型号的有缆遥控水下机器人结合了水下视频、多波束声呐、水下定位和机器人水下操作等功能,具有结构紧凑、操作方便、图像清晰等特点。这一型号的有缆遥控水下机器人系统由水下潜器、控制台、短基线定位系统、多波束图像声呐等单元组成。水下潜器配备有前视摄像头、后视摄像头、LED 照射灯具、水平推进器、垂直推进器、左右推进器等部件,最大下潜深度为300 m,通过遥控电缆与控制台相连。操作指令由控制台下达并由电缆传输:水下潜器得到指令后可进行上升下潜、前进后退、左右旋转等三维空间作业;还可进行水下悬停、机械臂控制、摄像头调整、辅助灯光和测距激光的开关等任务,并将水下拍摄视频和声呐探测结果回传储存至笔记本电脑。

图1 LBV300-5 水下机器人主要构件图
根据实际检测工作:SeaBotix LBV300-5 小型遥控水下机器人虽然具有作业灵活、工作高效、检测直观、数据可靠等优势;但是其也具有一些劣势,具体表现在:①对流速过快、具有旋涡及杂物垃圾、水质浑浊的复杂水下环境缺少有效应对措施,在这些水下区域内无法对待测目标展开详细检测;②基于遥控电缆的限制,容易发生电缆缠绕、挂附等状况,加之不当操作,严重时可导致水下潜器动力系统故障。
2021年,利用LBV300-5 有缆遥控水下机器人视频图像结合声呐系统对水电站的粗栅、前池、进水口检修闸门槽、尾水、大坝溢洪道泄水闸的弧门前上游及下游等局部水下结构和局部区域的完整性进行检测。检测期间水电站水库天气为多云,水位为160.77 m。本次水下实际检测工作的具体检测区域为粗栅1#~12#孔;前池;进水口检修闸门槽1#~3#机的左右两孔(共6 孔);尾水1#~6#孔;大坝溢洪道泄水闸的弧门前上游闸墩、弧门前堰顶、弧门的溢流面混凝土结构等;大坝溢洪道泄水闸下游闸墩、溢流面混凝土结构等。通常采用的水下检测方法是先对待测区域进行了声呐系统的大范围结构断面轮廓粗略扫描,而后再利用水下视频系统对可疑区域进行细致扫描。
2 工程概况
某水电站位于福建省三明市将乐县的金溪河干流上,由挡水坝、泄洪闸、水筏道、电站厂房和开关站等组成。坝顶交通桥顶高程165.6 m,坝顶总长约302 m。水电站大坝左右岸挡水坝均为实体重力坝,坝顶高程为165.5 m,最大坝高为28.5 m;左岸重力坝最大坝高为19 m,最大坝底宽11.8 m。泄洪闸共设10 孔,每孔净宽12 m,堰顶高程149 m,上设开敞式弧形钢闸门,弧形钢闸门尺寸12 m×12.3 m。泄洪闸为敞顶式,布置在河床中部,共10 孔,孔口宽12 m,采用消力戽消能。水电站坝址控制流域面积5819 km2,多年平均流量193.1 m3/s,平均年径流量60.9 亿m3。当正常蓄水位161 m 时,水库面积3.86 km2,干流回水长度约20 km。坝址河床左侧基岩裸露,右侧主河槽为砂卵石覆盖,厚5 m~7 m,基岩为云母石英片岩夹石英云母片岩,虽较软弱,但抗压强度可满足闸坝(最大坝高小于30 m)承载力的要求。
3 检测结果
(1)粗栅1#~12#孔。粗栅前淤积厚度为1.8 m~3.8 m;粗栅主梁、栅叶普遍锈蚀明显,锈包鼓胀;粗栅的栅叶、栅前见较多树枝、垃圾等淤积(见图2)。

图2 粗栅栅叶树枝及附着物淤积
(2)前池。前池底板混凝土基本完整,表面基本平整;未见明显的冲刷、开裂、露石、露筋、堆积等现象,仅靠近左岸挡水坝段略有堆积。
(3)进水口检修闸门槽1#~3#机的左右两孔共6 孔。进水口检修闸门槽基本完整,未见明显的冲刷、淘坑、开裂、露石、露筋等现象,底板上局部略有淤积物;闸门槽埋件普遍锈蚀,底槛附近混凝土磨损露石较明显;拦污栅细栅普遍锈蚀严重,栅叶上附着较多的垃圾,底槛埋件锈蚀明显。
(4)尾水1#~6#孔。尾水检修闸门槽、闸墩、底板等混凝土结构基本完整,表面附着大量的水生生物,未见明显的冲刷、淘坑、开裂、露石、露筋、堆积等现象;闸门槽埋件普遍锈蚀;尾水闸墩墩尾下游8 m 起普遍存在块石堆积。
(5)大坝溢洪道泄水闸的弧门前上游闸墩、弧门前堰顶、弧门的溢流面混凝土结构基本完整,未见明显的冲刷、淘坑、开裂、露石、露筋等现象,但局部也存在缺陷,如1#右侧闸墩上游墩头局部剥蚀、1#右侧闸墩局部孔洞(约15 cm×25 cm×6 cm)、4#孔左侧闸墩表面局部孔洞(约10 cm×10 cm×6 cm)、6#孔右侧闸墩表面较深孔洞(约40 cm×20 cm×12 cm)、7#孔左侧墩闸门埋件附近上下方向长条状孔洞(约8 cm×25 cm×5 cm);闸门槽埋件略有锈蚀,闸门止水座板、螺栓也存在锈蚀(见图3)。

图3 溢洪道闸门槽埋件锈蚀区域
(6)大坝溢洪道泄水闸下游闸墩、溢流面混凝土结构总体上基本完整,未见明显的淘坑、开裂等现象,但闸墩的水位波动区普遍存在冲刷、露石,9#孔左侧闸墩表面1 处露筋70 cm 长(见图4)。
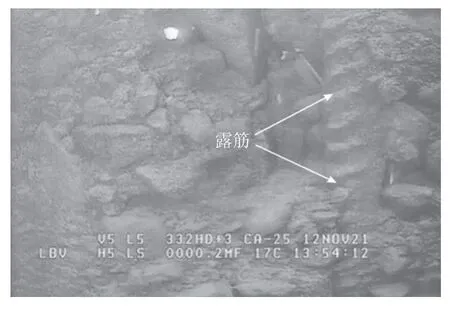
图4 9#孔左侧闸墩表面露筋区域
通过上述检测结果表明:水电站粗栅、前池、进水口检修闸门槽、尾水、大坝溢洪道泄水闸的弧门前上下游局部水下结构和区域的完整性良好,可以继续保持运行状态。针对局部水下结构存在的锈蚀区域要加以注意,针对局部水下区域出现的附着物淤积情况要进行及时的清理工作。本次利用有缆遥控水下机器人的检测工作为水电站定期维护工作提供了必要的数据。
4 结语
水电站工程表明有缆遥控水下机器人在检测水电工程水下结构方面具有明显的优势。通过有缆遥控水下机器人可清晰地检测水电站水下粗栅、前池、进水口检修闸门槽、尾水、大坝溢洪道泄水闸的弧门前上游及下游闸墩、溢流面混凝土等区域的实际情况,包括栅叶上的附着物、前池底板混凝土、拦污栅和尾水闸门侧轨的锈蚀区域。虽然大坝溢洪道泄水闸的弧门前上游及下游闸墩、弧门前堰顶、弧门的溢流面混凝土结构等区域未见明显的冲刷、淘坑、开裂、露石、露筋等现象,但局部也存在缺陷,为后期水电站运行制度和排除安全隐患提供了详实的基础信息。今后要逐步探索并完善水下机器人的检测区域,以期为水下结构的精准检测提供可靠的技术支撑。