无线同步仿生机械手设计
2023-02-08白子康李昊鹏
白子康,卢 高,李昊鹏
(北京科技大学天津学院 信息工程学院,天津 301800)
0 引 言
随着科学技术的快速发展,各个行业开始逐渐形成自动化、智能化、信息化和精细化模式。以往的人工操作生产方式已经无法适应当前社会发展需求[1-4]。当前,人工智能技术得到飞速发展,在工业生产中引入人工智能技术可以有效弥补传统人工操作生产方式的不足[5-7]。迄今为止,在机械臂的控制领域中,操纵方式一类为按键控制;另一类则需要多个控制杆来控制,设计繁琐,不易操作,一定程度上限制了机械臂的推广和使用。同步仿生机械臂能运用在高温、高压、高污染或是具有一定放射性的恶劣生产环境当中,具有控制灵活和操纵简单的特点,兼有人的行为意识和机械手的作业效能,已经成为当今世界科研领域及工业领域的热门研究方向[8-10]。
1 机械模型设计
1.1 机械手部分
机械手结构模型如图1所示。
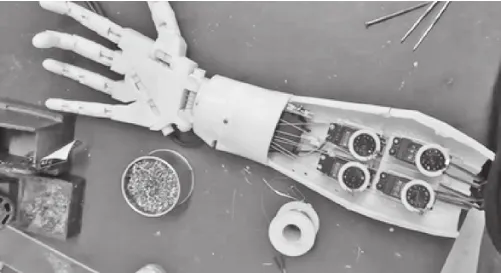
图1 机械手结构模型
在机械手的设计部分,每个关节分别为单独模块,主要为指关节、手掌等部分共21个零件;每个关节的运动通过细钢丝绳来模拟人手经络牵引实现;每根手指由两根软钢丝绳来牵引,以此实现手指的弯曲、伸张和固定;在手掌和关节处留有固定且合理的出口和进口,用于钢丝绳的固定和牵引。该设计方案可以提高机械手的灵活性和稳定性,更加有利于模拟人手的操作。
在机械手臂设计部分,主要为了实现存放和固定舵机、电路板,以及支撑机械手。设计时在其内部添加多处支撑部分用于保证舵机和电路板的稳定。
在腕关节处使用齿轮和舵机组合,用于实现机械手的转动,在内部使用细小铝管段分别固定在手臂壳体、舵机等位置,一方面能够固定钢丝绳运动的路径,另一方面也能够防止钢丝在内部运动时与内部的结构摩擦以及与钢丝缠绕。在舵机转头处安装了带凹槽的滑轮,这样可以固定钢丝绳的走向,使得舵机能够更加稳定地提供动力,保证手指有足够的抓力。该种设计方案可提高设备的灵活性、可持续性和稳定性。
1.2 体感机械手套部分
如图2所示,体感机械手套部分的设计是通过对普通手套进行缝制而改装的,在每个手指背部使用弹性布料缝制一个小口袋用于存放flex传感器。这样的设计有利于传感器的弯曲,也能够保证传感器不会左右滑动,大大提高手指弯曲精度,即在使用的时候手指能够灵活地弯曲,更加方便操作和使用。
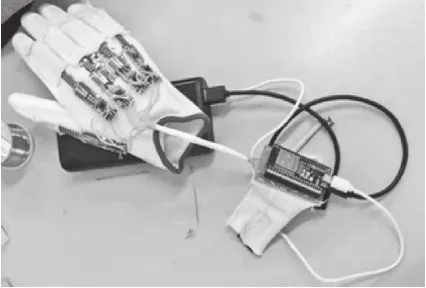
图2 体感机械手套结构模型
2 硬件设计
硬件设计框图如图3所示。
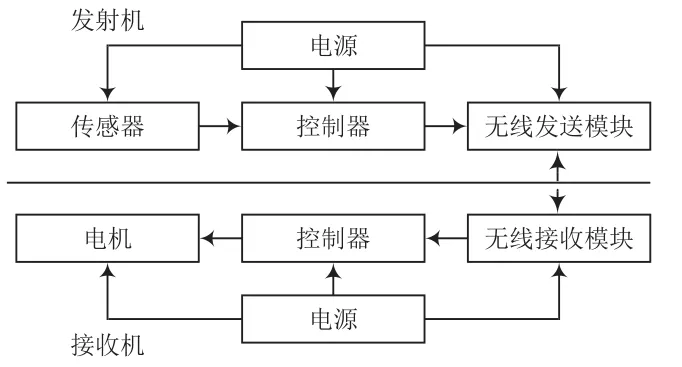
图3 硬件设计框图
2.1 发射机硬件设计
发射机部分需要完成对人体手部动作的检测,通过无线发射模块向接收机发送实时的手部动作信息,该部分由角度检测模块、微控制器、电源模块、蓝牙发送模块组成。角度检测传感器采用flex传感器,通过手指弯曲来改变传感器阻值,将阻值的变化转为模拟电压值的变化;再通过微控制器进行模数转化电压值,以此达到对手部动作信息的采集和保存;之后再对数据进行分析处理,通过蓝牙传输协议发送至接收机。
ESP32是一款集成2.4 GHz WiFi和蓝牙4.0双模的物联网芯片,能够很好地满足设备对蓝牙的使用需求。但是ESP32在使用蓝牙的情况下ADC2模块失效,只有4个模拟引脚能够使用。因此使用ESP32作为主控芯片、Arduino Nano作为数据采集模块。
电源模块采用两种方式供电:独立电源供电和Type-c数据线直接对设备进行供电。电路如图4所示。
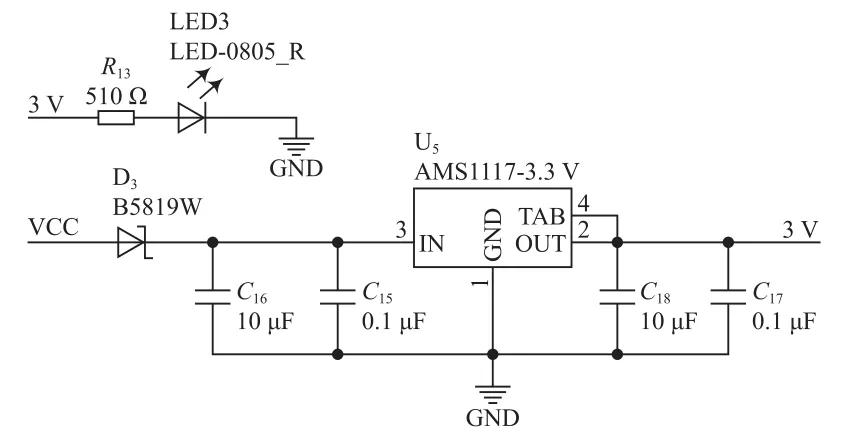
图4 电源模块电路
2.2 接收机硬件设计
接收机是整个设备的执行部分,主要由机械手臂模块、电机模块、无线接收模块、电源和微控制器构成。
电机模块采用MG996R舵机,舵机驱动电路如图5所示。MG996R舵机扭矩为15 kg·cm,转速为0.14 s/60°(6 V无负载),能够满足该设计的要求。ESP32的输出电压值为5 V,虽然可以满足电机的驱动,但其输出功率低,无法直接驱动多个电机运行。因此,采用电源模块直接为舵机供电,通过ESP32输出PWM信号来控制舵机。为了防止电机的电流倒灌,导致单片机损坏,采用MOS管进行反向隔离升压,保证电机和设备的稳定工作。
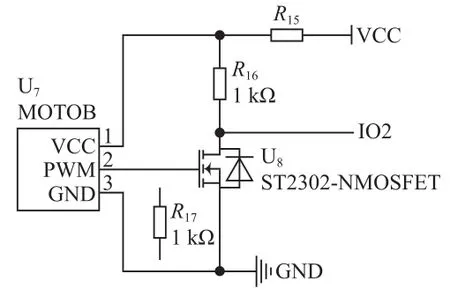
图5 舵机驱动电路
3 软件设计
3.1 发射机软件设计
发射机软件部分主要负责采集手部的运动情况,然后通过蓝牙将数据发送至接收机。数据采集通过Arduino Nano单片机实现,首先对单片机进行串口初始化和IO初始化配置,与ESP32进行数据通信,将采集到的数据通过串口同步发送至蓝牙发送模块。蓝牙发送模块使用的是ESP32,在蓝牙初始化中需要配置蓝牙服务ID和特征ID,特征ID用于搜索时进行识别,蓝牙服务ID用于蓝牙配对以及蓝牙之间的数据传输。流程如图6所示。
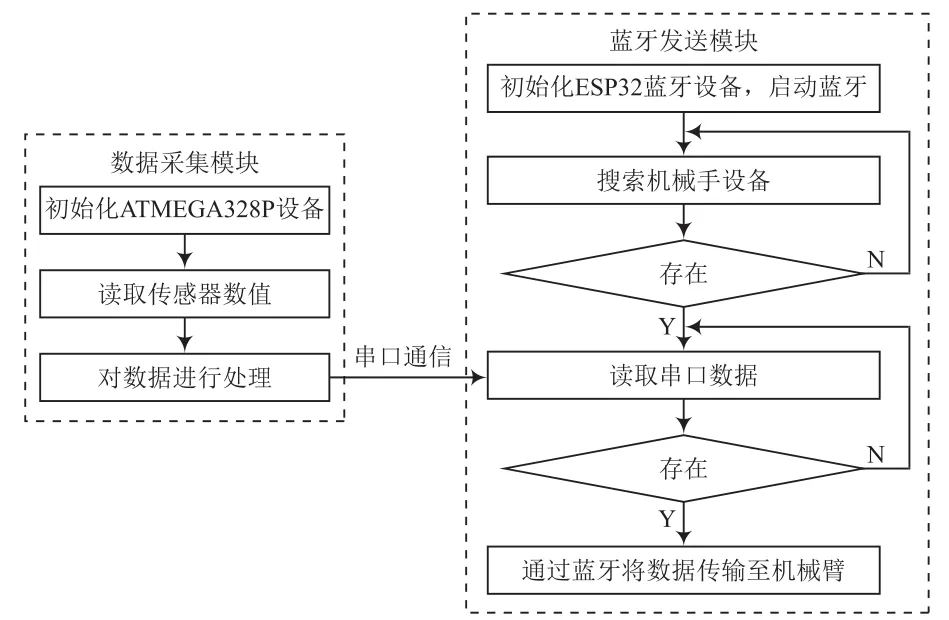
图6 发射机软件设计流程
3.2 接收机软件设计
接收机软件部分是整个系统最重要的部分,负责控制机械臂的运动,首先将设备自身进行广播使其他设备可以扫描到,当有其他设备与该设备配对时,关闭广播、连接设备并且读取设备数据,在读取到的数据中提取每个手指的动作参数,将其转换为对应舵机需要转动的角度。流程如图7所示。
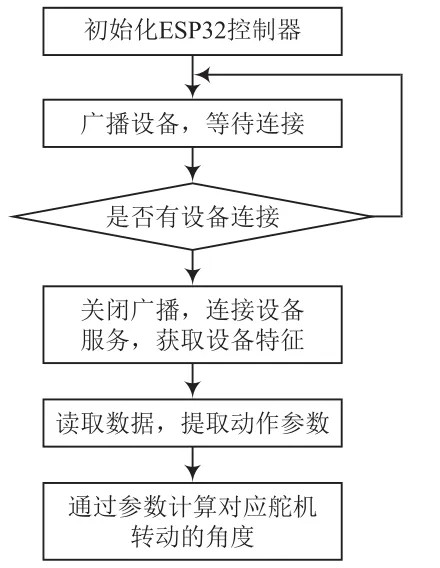
图7 接收机软件设计流程
在设备刚启动时需要佩戴体感手套握紧双手,然后再打开手掌,反复两次以校对参数,获取该使用者使用时每个手指的最大和最小弯曲参数值;再通过该函数输入每个舵机可转动的最大和最小值、对应手指的最大和最小弯曲参数值以及当前的弯曲参数值,计算得出对应舵机所需转动的角度,这样做对每个使用者都能够自动适配,提高机械臂的准确性。
4 系统测试
本设计主要是通过蓝牙将数据发送至接收机,接收机在读到的数据中提取每个手指动作参数,将其转换为对应舵机所需要转动的角度,所以传输距离、舵机所转动的角度、仿生机械手自由度结构以及数据手套上传感器的长度都会存在实验误差,为此进行了无线同步仿生机械手的灵敏度测试与抓取测试。
4.1 抓取测试
无线同步仿生机械手的5根手指在直立状态下开始运动,同步抓取各种物体,结果如图8所示。
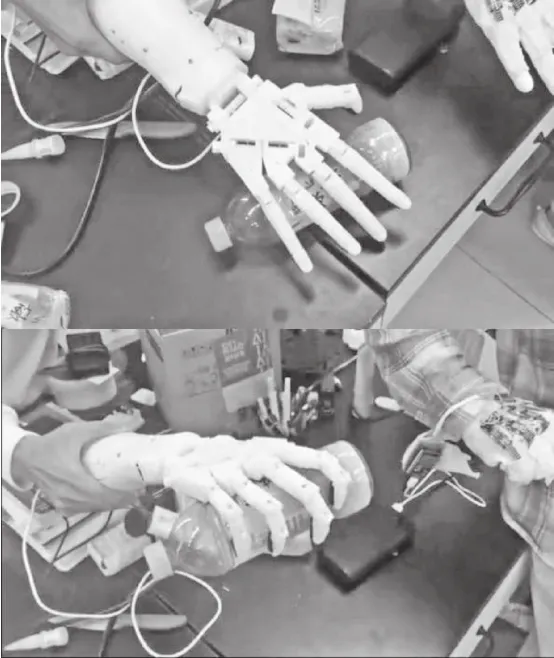
图8 抓取测试
在抓取硬材料物体过程中,5根手指同时反应,在2 s内迅速完成目标物体抓取,而不同手指运动角度略有差异;抓取稳定后,大拇指运动角度最大。
4.2 灵敏度测试
由表1的灵敏度测试结果可看出,受距离因素影响也会产生实验误差,如小拇指的灵敏度因舵机位置不同而产生较大误差。这是由于仿生机械手自由度结构原因导致整体误差产生,进而造成在抓取过程中也有一定误差。
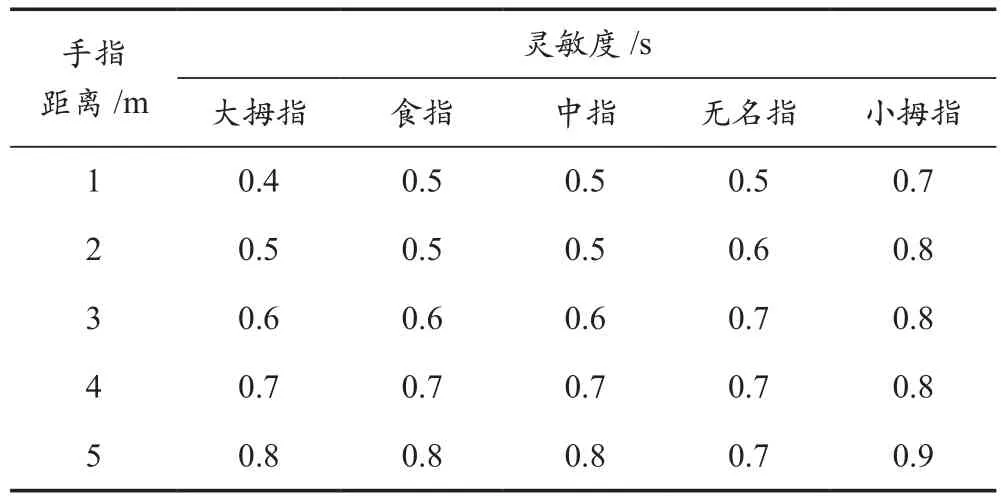
表1 灵敏度测试
5 结 语
本文设计的基于ESP32的无线同步仿生机械手实现了无线控制。通过机械手套采集信息,并采用无线发射模块进行数据发送;仿生机械手接收到数据后开始执行,利用五个舵机控制五根手指的运动,从而实现对仿生机械手的远程操作,实现了一种具有同步功能的无线同步机械手臂。
在实际的操作过程中,无线同步仿生机械手可以代替人类完成一些复杂情况下的任务,从而确保工作人员自身的生命安全。例如航空航天领域可以利用仿生手在太空中完成一些危险任务;在化工、生物领域可以完成危险的生物化学项目。同时仿生手也可以为残疾人提供许多便利,为健全的人提供一种全新的生活服务。
