装载机械臂的智能轮式环卫机器人
2023-02-08秦耀泽郭迎九
黄 磊,秦耀泽,郭迎九
(北京城市学院 信息学部,北京 101300)
0 引 言
近年来,我国非常重视生活垃圾的分类回收,有数据显示我国年产垃圾约占全球的30%,且城市固体废弃物的积累量约为70亿吨[1-2]。上海自1995年起陆续发布了八部针对生活垃圾处理的政策文件,而到2019年落实完全分类的居民仅有11%[3]。另一方面,目前城市环卫主要依靠人力劳动,而2020年咸阳市环卫工人的健康检查报告显示:受检的1 066名从业者平均年龄为56岁,健康方面的异常率高达92.1%[4]。传统环卫行业同时面临招工难、留工难、用工难等问题[5],城市环卫工作高强度低收入的性质与高龄从业者长期亚健康状态之间的矛盾日益激烈。
随着人工智能与传感识别技术的飞速发展,利用相关技术设计开发一款辅助完成城市环卫工作的智能机器人,能够有效缓解矛盾。早在20世纪40年代,西方国家已经开始研发液压型车载机械臂以减少高昂的人力成本,如德国Ducker公司研发了基于同套臂架系统的智能公路清洁养护工程车,通过更换末端机构实现不同应用。但此类产品体积较大,并没有很好地减少人力成本。
跨入信息时代后,为给全面推进城市数字化转型赋能,实现无人环卫器械的商用落地,百度、宇通重工、龙马环卫等大型企业相继推出智能环卫车辆产品,满足园区环境的地面清扫需求[6-7]。而就现阶段的无人驾驶环卫车来说,由于自动驾驶技术的局限性导致产品对环境依赖较高,也弱化了垃圾处理的针对性,因而目前并没有得到广泛应用。
1 环卫机器人设计
1.1 结构设计
基于上述背景,本文开发了一款装载机械臂的智能轮式环卫机器人。机器人的底盘结构采用由一组万向轮和两组伺服电机驱动的轮式结构。万向轮支撑整体结构及辅助运动,驱动轮通过伺服电机与减速器的同步带传动方式进行驱动,调整伺服电机输入,配合可控制电机转向的H桥电路,即可实现机器人的行驶功能。机械臂结构如图1所示,各关节都由独立伺服机构控制,最终所有伺服器由控制器统一控制并协调工作[8-12]。
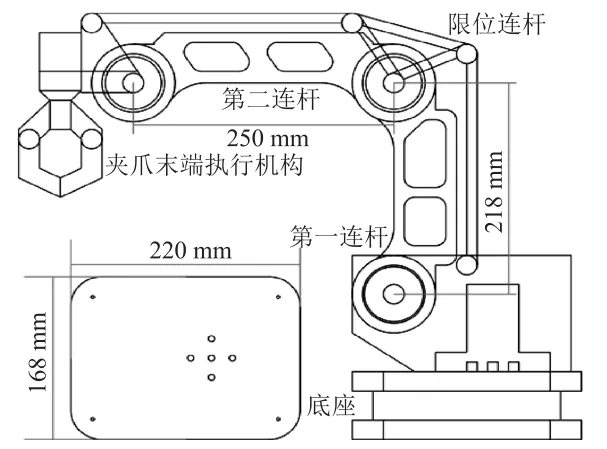
图1 四自由度机械臂示意图
使用D-H法,根据关节结构为每处连杆建立坐标系Ai(i-1),通过坐标系的变换完成机械臂末端位姿的描述,其比例模型的参数见表1所列。以此进行机械臂模型仿真及关节运动解算[13]:
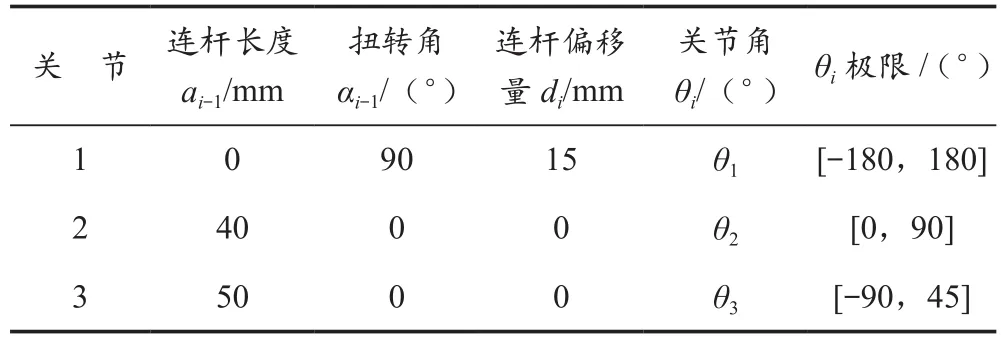
表1 四自由度机械臂D-H参数表
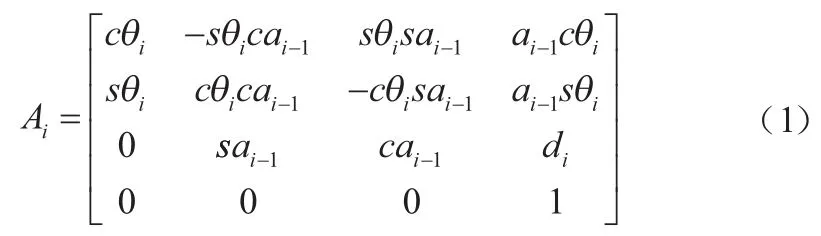
其中,Ai表示第一个连杆坐标系相对于基坐标系的位置和姿态,以此类推。该机械臂的正运动学变换矩阵为:
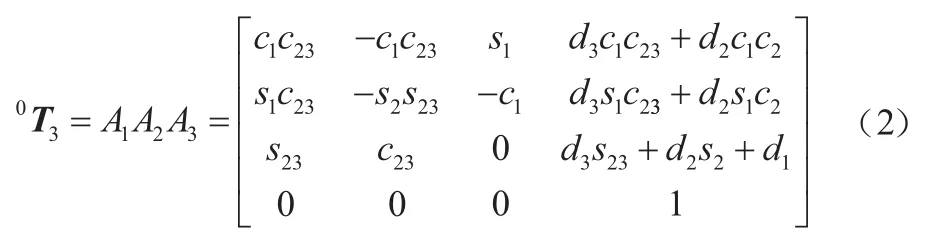
在此基础上可求解各个关节的转角θi,即式(3)~(5)。通过输入PWM控制每个关节的转角,即可实现对该机械臂整体的控制。

1.2 传感网络部署
(1)激光雷达与SLAM

由贝叶斯公式计算得:

两边取对数:


图2 激光SLAM建图
(2)摄像头与目标识别
在目标识别方面,经历了OpenCV和Tensorflow路线带来的高成本、高难度和低收益后,最终选择了相对简洁的华为多主体和百度垃圾识别双API调用方案,以多主体识别API为例,将摄像头画面周期上传至OSS生成URL,调用API接口即可返回主体信息。
(3)超声波测距模块及垃圾位置判定
HC-SR04采用IO口TRIG触发测距,发送信号后,若接收到返回信号,则通过IO口ECHO输出时差高电平。常温下声波传输速度约为344 m/s,通过式(9)即可计算距离d,其中t为高电平时间。

摄像头反馈的方位信息结合超声反馈的距离信息构成物体极坐标,由控制器树莓派在控制中不断校正实现闭环,最终驱动机械臂实现抓取。
(4)其他参照信息传感模块
为促成机器人的数据可视化工作,实现对其全方位的控制,为其装载了GPS模块S1216和加速度模块MPU6050,远程获取经纬度信息和六轴速度信息。
1.3 控制核心
控制核心是机器人数据计算、输出命令的重要模块,本文的设计中选择了较高算力的树莓派4B作为上位机,与32单片机构成机器人的双控制核心。树莓派拥有网卡、USB等模块,同时具备音视频模拟输出能力,还具备GPIO、SPI、UART等硬件设备,为机器人提供硬件条件和计算环境,具有计算能力强、体型小等优点。为了充分应用树莓派资源,引用了一款扩展板Nano_Controlle,为传感器提供更多扩展接口,同时输出PWM信号控制底盘。
2 整体框架
本文提出如图3所示的硬件架构,模块部署及程序烧录实物如图4所示,测试结果见表2所列。
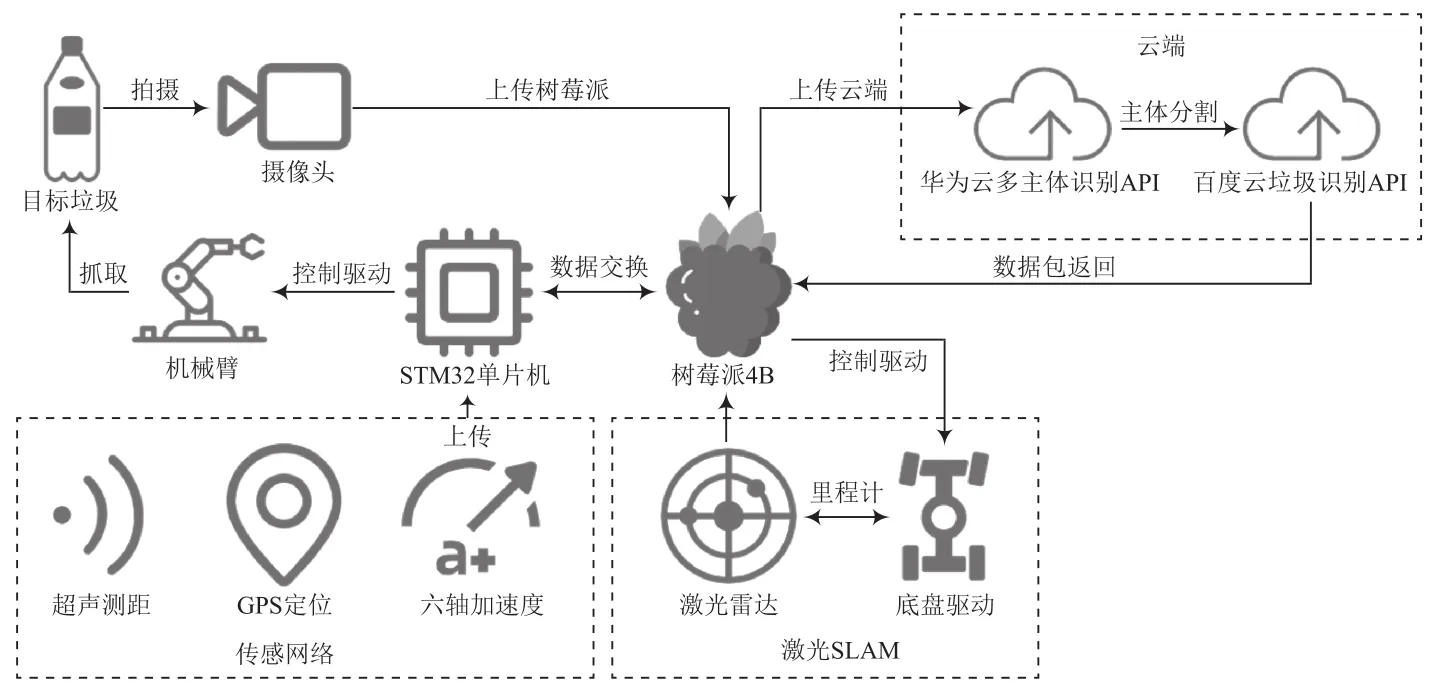
图3 装载机械臂的智能轮式环卫机器人硬件系统模型
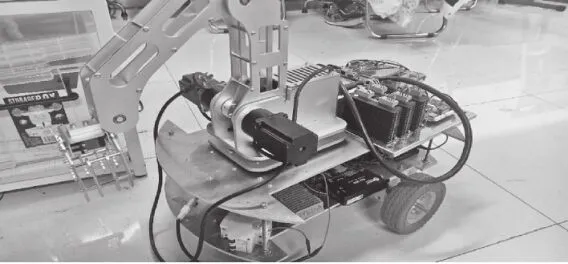
图4 装载机械臂的智能轮式环卫机器人实物
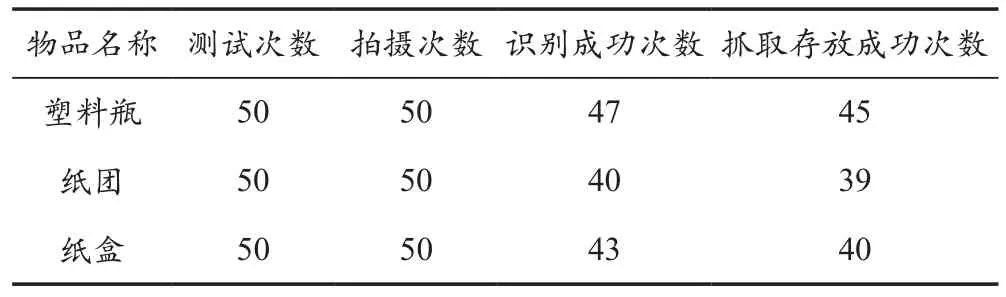
表2 实验室测试结果
3 结 语
本文设计了一款辅助城市环卫的智能机器人,具备避障导航、路径规划、对象识别、控制抓取四大核心功能。尽管各项基本功能已顺利实现,但是仍有空间亟待优化。第一是目标识别方面,现有方案由于需要嵌套调用API,网络依赖性强、延迟性较高。后期团队提出基于Paddlelite的本地化模型部署方案,但数据集局限导致识别精度欠缺,想要实装仍需优化。第二是在目标物品定位上,可以改用深度摄像头等高精设备。另外,未来还可以考虑通过搭载不同的末端执行机构完成更多类型的工作,乃至于在军事、消防、物流等领域开拓新的应用,为提高人们生活水平、推动科学技术发展发挥更大的作用。
