车联网环境下右转车礼让行人速度引导
2023-02-08杨晓芳何佳乐
杨晓芳,何佳乐
(上海理工大学 管理学院,上海 200093)
0 引言
自2017 年新版《中华人民共和国道路交通安全法》颁布以来,全国各地对机动车在斑马线前礼让行人的法律法规愈发完善、合理。据上海市机动车礼让行人研究调查,约有25%的车辆选择过度让行,造成不必要的交叉口交通资源浪费[1]。在当前礼让行人的环境下,右转车辆易在停车线前让行行人,从而产生较大的车速波动,易在交叉口处造成停车排队,从而影响该路段处车辆,使右转机动车频繁出现启停、怠速的现象,加剧了机动车的燃油消耗以及污染物排放[2]。因此对右转机动车让行行人的速度引导进行研究,以减少二者在交叉口处的冲突、提高右转车在交叉口处的通行效率。
随着V2X 技术的发展,行人、机动车、城市道路之间的信息不再相互闭塞[3]。国内外学者对信号灯交叉口的网联车车速引导进行了大量研究,Ubiergo[4]等针对城市交通中车辆轨迹波动问题,提出了基于车联网环境下的ASL(Advisory Speed Limit)控制策略,通过对每辆车进行单独的限速控制,可有效地减少车辆轨迹的波动,并对燃油消耗、排放有一定改善作用;Liu[5]等人提出两种针对单车、多车的引导策略,构建了双向六车道的交叉口仿真系统,实现了V2V、V2I 的通信,实时干预车辆运行,结果表明车联网环境可显著提高交叉口通行效率,且多车速度引导策略更为有效;安实[6]提出一种针对车队头车的基于多级可变速度限制的交叉口车速引导策略,避免了车辆突然变速、怠速,有效的提高了交叉口处的通行效率;张靖思[7]通过将多目标优化模型和速度引导模型结合,对机动车实施动态引导,以实现干线、双周期交叉口共同优化的目的;KAMAL[8]针对自动驾驶和传统驾驶的混合交通环境,提出一种考虑信号灯信息和前方车辆信息的车速引导策略;刘显贵[9]针对不同的网联汽车占比率,建立基于目标车速关联的油耗排放模型,利用多目标遗传算法得到能耗、排放和通行时间最小的目标车速,可在车辆不停车通过交叉口的速度范围内求得最优的引导速度;鹿应荣、徐丽萍等人[10-11]对网联汽车速度引导分别进行了兼顾驾驶舒适性与环境友好性、兼顾考虑车辆跟驰行为和引导场景划分的研究,所提出的速度诱导策略更贴合实际。
综上所述,目前交叉口车速引导策略主要以信号灯信息以及车车之间运行状态信息为基础,对不受灯控的右转机动车的速度引导研究不足。本文提出一种基于车联网环境下交叉口信息互通的特点,结合自动驾驶、V2P 人车通信技术的交叉口右转机动车车速引导策略,使右转机动车提前获取行人的过街需求信息,在保证效率最优的前提下对右转机动车车速进行引导,充分利用人车冲突区的空闲时间,使其能够不停车通过交叉口,同时减少了机动车在交叉口处因启停、怠速等原因造成的燃油消耗及污染物排放。
1 控制策略
1.1 问题描述
一般情况下,右转车行驶轨迹中都与两条人行横道存在冲突区,处于右转车进口车道的为第一冲突区,处于右转车出口车道的为第二冲突区,如图1所示。当右转机动车到达冲突区前时,一般存在以下4 种情况:
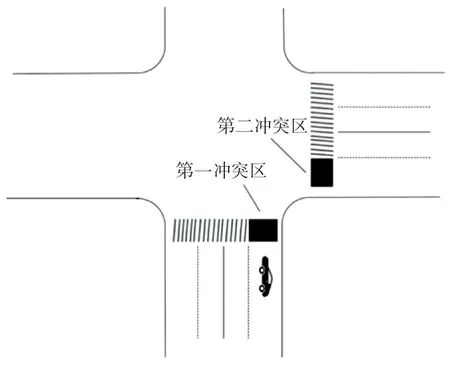
图1 冲突区示意图Fig.1 Schematic diagram of conflict zone
(1)冲突区空闲,机动车正常通过交叉口;
(2)冲突区空闲但行人即将进入冲突区,机动车可选择加速、减速或停车礼让;
(3)冲突区存在行人,机动车需减速或停车礼让行人;
(4)冲突区存在行人,但行人即将离开冲突区,机动车可选择减速通过或停车礼让。
第二种情况,机动车选择较多,但大多会选择减速或停车礼让,需在停车线处等待行人通过,造成较大的延误;第三、四种情况,右转机动车不得不选择停车礼让或怠速行驶,从而发生较大的车速波动以及车辆启停,除了对车辆行驶的平稳性、燃油消耗、污染物排放量有较大影响外,对行人也会造成一定的心理压力,导致“人车互让”,加大了机动车与行人的延误。
1.2 控制流程
本文将自动驾驶技术、V2P 行人检测技术结合,将获取到的行人信息、车辆信息在中心控制系统统一处理,并将其反馈给机动车,使其调整控制车速,做到不停车、快速通过交叉口。本文模型的控制流程图如图2 所示。
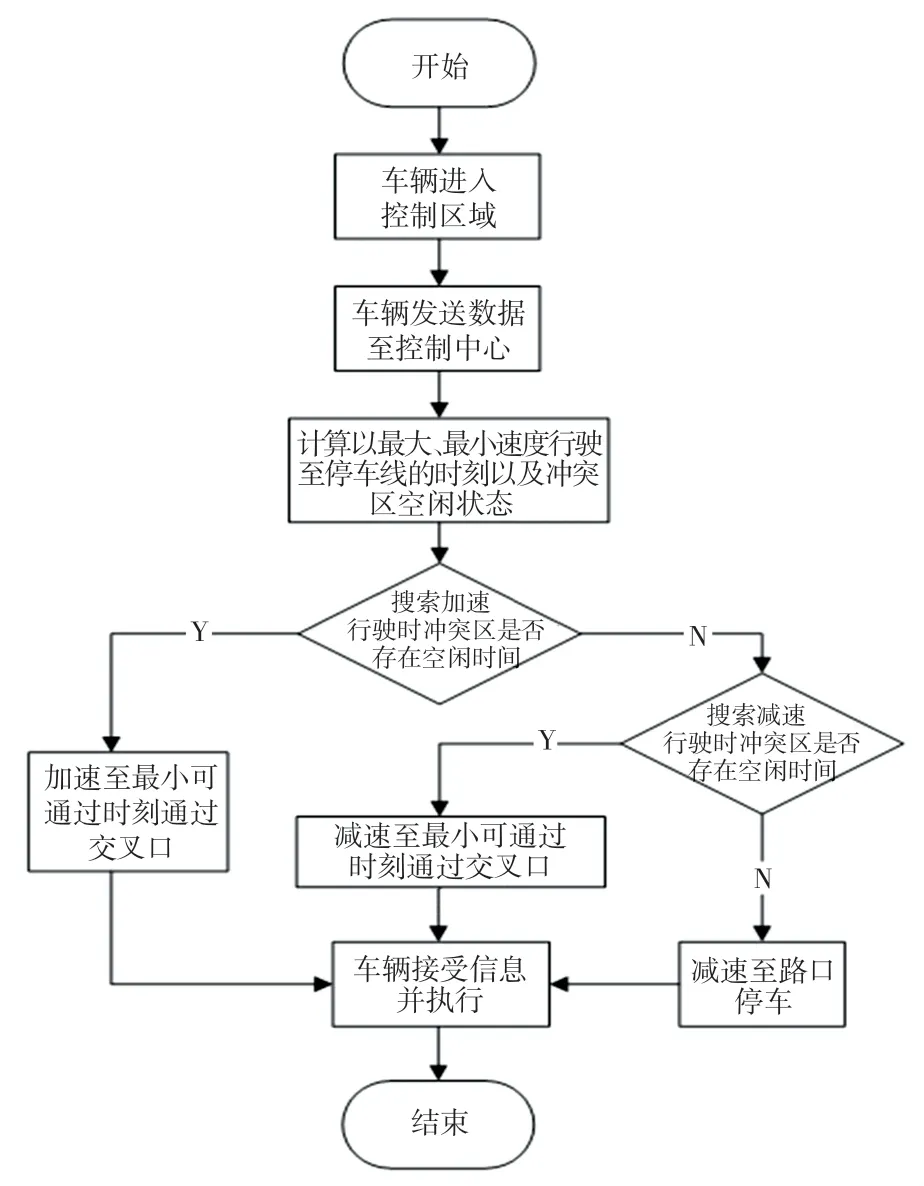
图2 控制流程图Fig.2 Control flow chart
控制规则示意图如图3 所示,当右转机动车进入控制区域时,系统将判定机动车以最大、最小速度抵达交叉口时的冲突区空闲状态,并选择合适的速度;机动车以原速度继续行驶,在抵达交叉口后需停车礼让行人。若选择加速行驶,Ta2p1与Tl1p1的时差不足使机动车通过,所以控制中心将控制机动车减速至V1以保证其不停车并以最快速度匀速通过交叉口。
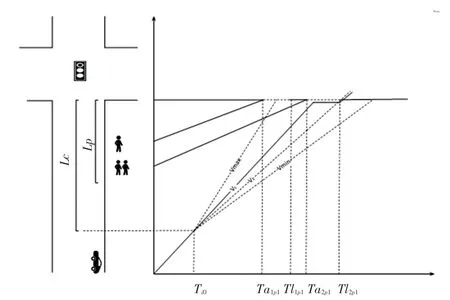
图3 控制规则示意图Fig.3 Schematic diagram of control rules
2 车速控制模型
2.1 基本假设
本研究建立于以下基本假设条件之上:
(1)机动车规格、性能一致,行人步速、占地面积相同,且遵守交通规则;
(2)车辆从进入控制区域到离开冲突区域之间切换为自动驾驶状态;
(3)控制中心与车辆的通信延迟在可接受的范围之内;
(4)车辆、行人的到达服从泊松分布。
2.2 行人及相关设施
行人信号控制灯末尾时采用绿闪表示,在绿灯闪烁时,未进入交叉口的行人不得进入交叉口,需在行人过街安全岛或路口前等待。
绿闪信号配时时间采用HCM2010 计算方法,单位为s(秒),公式为

其中,DC为行人过街距离,单位为m(米),VP为行人步速,本文采取1.2 m/s。
2.3 行人信息处理
本文将每个右转车道都与两个人行横道存在冲突区。行人分为同侧行人和对向行人,细分为一、二冲突区同侧行人和一、二冲突区对向行人,每个行人都将经历进入视频检测区、进入冲突区、离开冲突区3 种状态。控制中心将记录行人进入检测区的时刻,并根据其速度计算行人到达、离开冲突区的对应时刻。
2.3.1 冲突区同侧行人信息处理
当第n个行人到达交叉口时,其通行方向为绿灯,Tanp1为第一冲突区同侧第n个行人到达冲突区的时刻(s),公式为

其中,tn1为冲突区同侧第n个行人进入视频检测区的时刻(s);Lp为视频检测区长度(m);Lf为非机动车道宽度(m);VP为行人步速(m/s).
当第n个行人到达交叉口时,通行方向为红灯,其到达冲突区的时刻为Tanp2,公式为
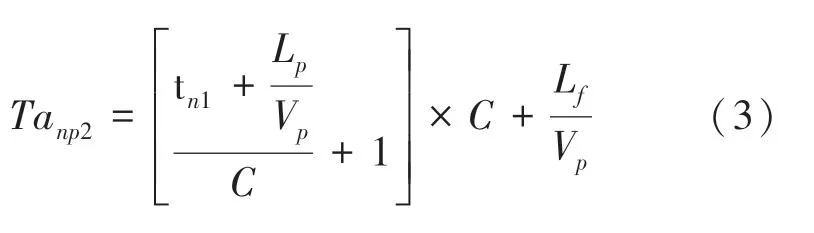
其中,C为信号灯周期(s)。
第n个行人离开冲突区的计算公式为
式中Lv为机动车道宽度(m)。
2.3.2 冲突区对侧行人信息处理
当第n个行人抵达交叉口时,绿灯剩余时间足够行人通过交叉口,其到达冲突区的时刻为Tanp3为

其中,tn2为冲突区对侧第n个行人进入视频检测区的时刻(s),m为机动车道数,一般取4 或6。
当第n个行人抵达交叉口时,绿灯剩余时间仅够行人抵达中央安全岛。其到达冲突区的时刻Tanp4为
当第n个行人抵达交叉口时,绿灯剩余时间不足或为红灯。其到达冲突区的时刻为Tanp5,为
冲突区对侧第n个行人离开冲突区的时刻Tlnp2为
其中,Tanpx为冲突区对侧第n个行人进入冲突区的时刻(s),x为3、4、5;
2.4 机动车控制区域范围界定
由于右转车辆不受信号灯控制,所以机动车最小控制区域只需要有充足的距离调整车速,最大控制区域则是右转机动车需在最长行人视频检测时间内离开控制区域。Lc为控制区域长度,取值范围为,Cp Vmin],Vmax、Vmin为机动车最大、最小速度,a为加速度,b为减速度,Cp为最长行人视频检测时间。
2.5 车速控制策略
当机动车进入控制区域后,控制中心将会接收到机动车发送的车速、车长等信息,并计算该机动车加速至限制最高速度和减速至限制最小速度到达交叉口的时刻。结合系统中得到的冲突区的空闲状态,选择最小时刻的通过时刻快速通过。
2.5.1 冲突区空闲时间
冲突区空闲时间为冲突区中最后一位的行人离开后,此时冲突区内不存在任何行人或车辆,在下一位行人进入之前,这段时间为冲突区的空闲时间,控制中心根据空闲时间长短决定机动车的通过。Tp为交叉口的空闲时间,计算公式为
其中,Tl(n-1)px为冲突区同侧或对侧第n -1 个行人的离开时刻,即机动车允许的进入时刻,Tanpx为冲突区同侧或对侧第n个行人进入的时刻。
2.5.2 加(减)速控制模型
当右转机动车进入控制区域后,控制中心将计算出其最大、最小速度抵达停车线前的时刻,并在此时段选定合适的进入时刻,从而求得机动车的控制速度。
当选定的进入时刻小于机动车的原进入时刻时,启动加速控制模型,计算公式为
其中,Tlnpx为x区域第n个行人的离开时刻;Ti,min,Ti,max为机动车最大、最小速度抵达停车线前的时刻(s);Ti为第i辆机动车以原速度到达停车线的时刻(s);Tc为第i辆机动车在控制区域内的运行时间(s);Vc为机动车的初始速度(m/s);a为机动车加速度(m/s2);Tn1,2为右转机动车通过第一、第二冲突区所需的时间(s);lq为第一冲突区入口至第二冲突区出口的机动车轨迹距离(m);lv为机动车长度(m);V1为机动车进入控制区域后的控制车速(m/s);WE为人行横道宽度(m);Tp为交叉口的空闲时间(s)。
当选定的进入时刻大于机动车的原进入时刻时,启动减速控制模型。减速控制模型与加速控制模型相同。
2.5.3 停车控制模型
当可通过的空闲时间大于机动车以最小速度抵挡停车线的时刻,则启动停车控制模型,即当机动车进入控制区域后,控制其以经济、绿色的减速度匀减速至路口停车,计算公式为:
3 模型仿真与验证
3.1 仿真平台及参数
本文采用交通仿真软件vissim5.2 进行仿真模拟,仿真参数见表1。通过vissim 仿真获取传统驾驶模式下的机动车及行人数据;将数据导入速度控制程序中,得到经过控制后的机动车运行状态以及行程时间等数据。

表1 仿真参数Tab.1 Simulation parameters
仿真中的行人流量选取400 人/h、800 人/h,单条右转车道的机动车流量选取300~700 pcu/h,仿真结果见表2、表3。其中,行人流量为与单个右转道发生冲突的两条人行横道上的行人。
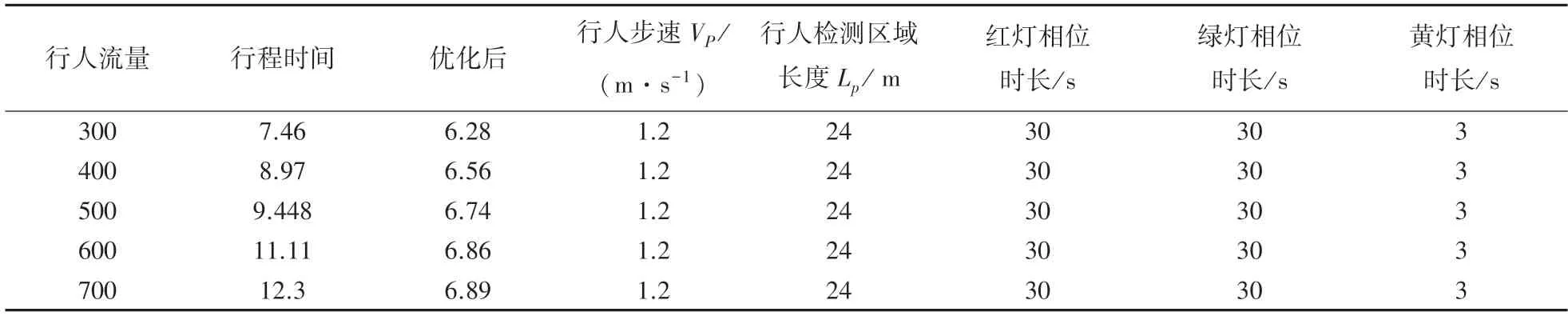
表2 400 人/h 流量下机动车行程时间Tab.2 Motor vehicle travel time at 400 ped/h
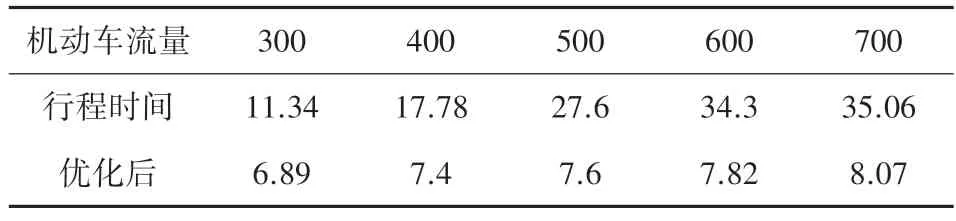
表3 800 人/h 流量下机动车行程时间Tab.3 Motor vehicle travel time at 800
3.2 仿真结果分析
3.2.1 行程时间分析
由表2、3 可知,当行人流量不变时,机动车流量越大,其行程时间也将增大。因为当右转机动车流量增大以后,二者在交叉口处发生冲突的可能性也将增大,从而导致右转机动车的延误。
当行人流量为400 pcu/h 时,由于行人对冲突区的占用时间较少,机动车流量的增大对其自身几乎没有太大影响,仍能保持正常通行。当行人流量为800 pcu/h,机动车的行程时间与其流量几乎成正比,直至右转机动车流量到达600 pcu/h 时,机动车的行程时间达到峰值。此时应对该交叉口采取右转控制措施,如设置专用右转相位或右转速度控制策略。采用控制策略后,400、800 人/h 行人流量下300~700 pcu/h 机动车的行程时间优化量如图4 所示,可见二者的流量越大,人车冲突越剧烈,其优化效果越为明显。
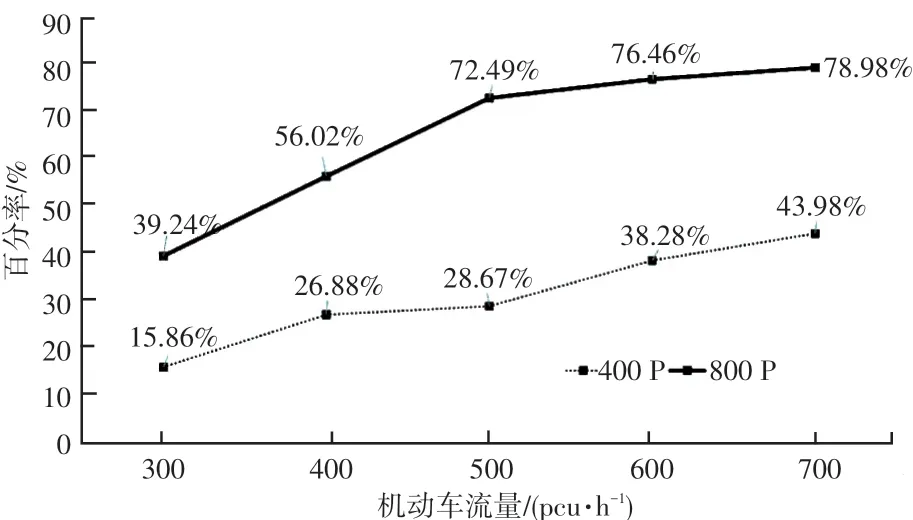
图4 行程时间优化量Fig.4 Travel time optimization
3.2.2 燃油消耗分析
本文采用VT-Micro 经典油耗模型,该模型可通过车辆每秒的加速度、速度计算得到该秒的油耗,计算公式为

表4 回归系数Tab.4 Regression coefficient

表4 回归系数Tab.4 Regression coefficient
仿真时间内所有车辆在控制区域内所消耗的燃油量及车均燃油量如图5 所示,结合表3 可得出,当机动车流量增大时,其与行人的冲突剧烈,右转机动车行程时间增加,出现排队现象,启停频繁,车辆的燃油消耗也随之增大。应用本文提出的控制策略,车辆的总燃油消耗分别下降了26.6%、41.7%、41.2%、41.5%、43.1%,对大流量的右转机动车优化明显,平均下降了41.9%。
3.2.3 机动车轨迹分析
800 pcu/h 行人流量、600 pcu/h 机动车流量下优化前后的车辆轨迹图如图6 和图7 所示。可知右转机动车的停车等待、排队、缓行的现象尤为突出,甚至在路段中出现了二次停车。
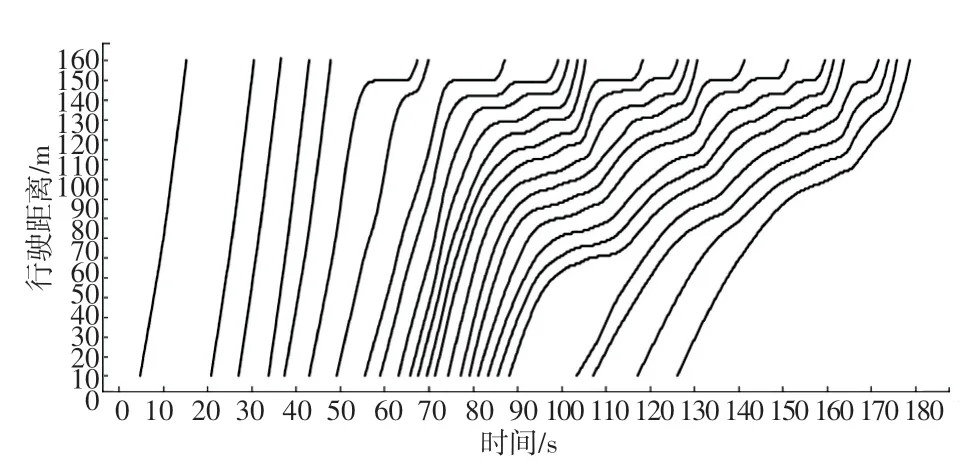
图6 车辆原始轨迹图Fig.6 Original vehicle trajectory
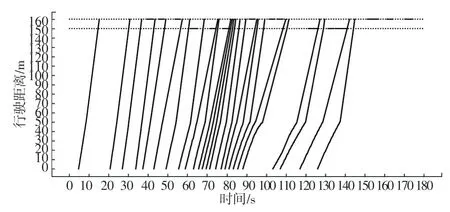
图7 优化后车辆轨迹图Fig.7 Optimized vehicle trajectory
图7 中虚线线段表示冲突区的空闲时刻,实线线段表示冲突区内存在行人。经过优化后,右转机动车的到达时刻均为冲突区的空闲时刻且存在足够的时间通过冲突区,使交通资源得到了更加充分的利用。
4 结束语
本文通过综合分析右转机动车与行人的交互,在优先保障行人通行的情况下,提出了一种右转机动车速度控制策略,以求得右转机动车的通行效率最优的行驶速度。通过vissim5.2 的仿真研究,对其结果进行分析,得到了以下结论:
(1)本文提出的速度控制策略,右转机动车将更加高效地利用冲突区的空闲时间以通过交叉口,有效的减少了右转机动车在交叉口停车以及路段处缓行的现象,可更加合理地对交叉口交通资源进行配置;
(2)本文提出的速度控制策略下,右转机动车运行状态更加平稳,传统驾驶模式下在临近交叉口时可能发生的剧烈车速变化情况不再出现,交叉口及路段处的排队情况大幅改善,同时降低了机动车燃油消耗。
本文未考虑行人步行速度在时空上的变化。下一步将研究行人在人行横道位置、绿灯剩余时间以及当前礼让行人交通环境对步行速度的影响。同时,非机动车对右转机动车的影响也是未来研究的重点方向。
