KONGSBERG 推进器操纵手柄维修实例
2023-02-07孔凡祥
孔凡祥
(交通运输部上海打捞局,上海 200090)
0 引言
某轮是一艘全电力吊舱推进的DP2 三用工作船,4 台推进器操纵系统采用了挪威的Kongsberg Maritime AS产品。在驾驶台前、后驾驶台集合了K-Pos,K-Thrust,K-Master and IJS 等多个操纵系统,推进器操纵手柄多达9 个[1]。其中No.2 吊舱推进器前驾台操纵手柄,TYPE:KML-10 Azimuth lever(motor)(见图1)发生转速设定不稳定故障,严重影响船舶操作可靠性。这个手柄集成了吊舱推进器的转速和转向控制及其他多项功能。十几万的采购价格,让采用更换新手柄的维修方案变得有些艰难。在不引起损害扩大的前提下,我尝试自行维修,并取得了满意的效果,下面分享给大家。

图1 推进器手柄外观
1 故障现象
此设备一年前开始出现转速设定不稳现象,后来情况逐渐恶化。故障表现在将手柄向前推进到某转速设定值,手柄输出信号会大于设定值3%~5%,最大时会超过10%,然后再回到该设定值(设定值和实际转速值可以通过手柄液晶屏显示)[2]。这样导致推进器转速忽快忽慢,发电机负荷波动剧烈,对船舶安全影响很大。
2 故障分析
首先,通过替换法锁定了转速波动大问题是此操作手柄故障的原因导致。分解手柄总成查看,与转速和转向有关的大体分三个部分:①机械传动部分(见图2)和②电路板部分通过检查排除,故障大概率是由于③输出电位器受损引起的。电位器共计4 个,每2 个为一组,串联在手柄转杆轴上。网线接入见图3。一组负责转向控制,一个主用,一个备用(未接线),如图4 中Pot.2。另一组负责转速控制,一个主用,一个备用(未接线),如图4 中Pot.1。2 个主用电位器通过P3 端口与下游RPC420 电路板相连,2 个备用电位器连接P7 端口闲置。拔除连接线情况下,对手柄进行操作,用万用表欧姆档测量电位器输出,对比主、备用电位器数值差别不大,那么可以尝试启用备用电位器,替代主用。

图2 推进器手柄内部
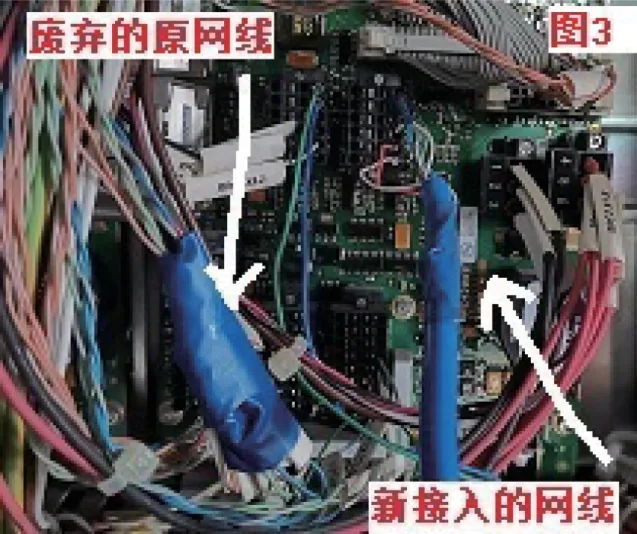
图3 网 线
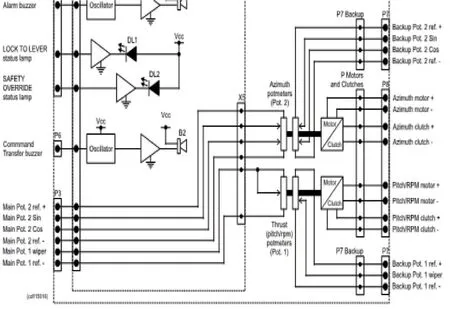
图4 操纵手柄电路原理图【2】
3 解决方案
替代方法分为手柄内部接线和外部接线两种。A.手柄内部更改接线可以达到替代目的,但是需要解体手柄并重新焊接线路到电路板上,操作繁琐,风险很高,不是首选。B.还可以从手柄外部着手(如图4 所示),我发现转速电位器的信号线(3 根)与转向电位器信号线(4 根)共用一根8 股网线输出信号,所以需要把转速和转向两个备用电位器一起整体取代主用电位器。但是主用插口P3(6 针)与备用插口P7(7 针)与各自的电位器接线是不一致的,所以不能简单的把主用线路插头插到备用接口进行操作。为了避免二次损害,我首先查阅了主备电位器的规格(见图5)[2]相同,再到电位器经销商官网得到端口数据,然后才可以改线。

图5 电位器规格
查询得知维修涉及的转速设定电位器(THRUST POTENTIOMETER)是由日本思博(SAKAE) 机械电气株式会社生产,型号为:FCP30AG,标准阻值为5KΩ,有3个出线头,耐压250V,它是一种线性导电塑料电位器,精度不是很高,但是很耐用,厂家资料显示旋转寿命达到5 千万次[3],但是受潮湿影响大,海上的气候可能导致这个电位器提前出了故障(可以考虑在手柄安装环境加装除湿设备)。另一个电位器是转向电位器(AZIMUTH POTENTIOMETER),同样由SAKAE 生产,型号:FSCB30AG,标准阻值为5KΩ,它是一个单圈非线性导电塑料电位器,确切的说是正/余弦函数电位器,有5 个出头,耐压250V[3]。下面判断一下启用备用电位器的手柄输出精度和风险:
转速电位器(THRUST POTENTIOMETER)的外部接线资料如图6[4]所示:
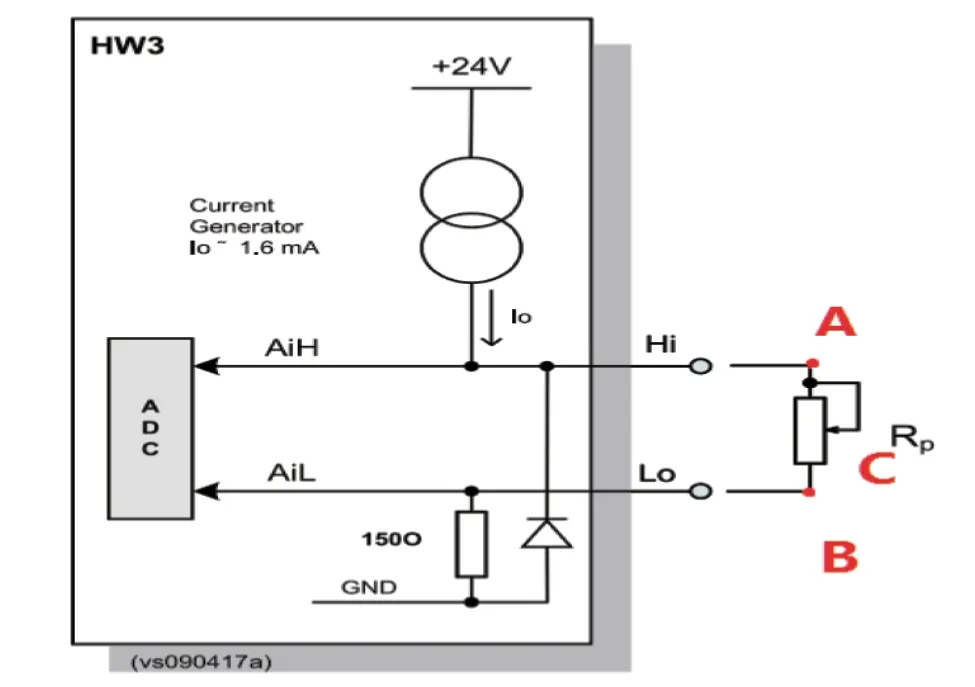
图6 转速电位器的外部接线示意图
图中Rp即为转速电位器,Hi—Lo 端点左面为测量电路,改变Rp 的阻值,引起Hi 和Lo 之间的电压变化,信号由模数转换器(ADC)传递给下游的RPC420 控制板的通信处理器,再由通信处理器转变为光纤信号,通过光缆传到推进器本地控制站FS202,再由本地控制站发出0-10VDC 信号控制推进器变频器,使推进器达到要求转速[5]。如果断开Hi 和Lo 的连接,用万用表可以测得AB 间电阻,改变操作手柄在转速设定上的位置,可以分别测得CB 间的电阻。实际操作中我把手柄转速轮设定到了0%,50%,75%和100%的位置,比较主电位器和备用电位器的电阻数值,差值在0.3%~0.8%之间,电位器厂商网站公布的数据,该电位器最大线性公差为±1.0%[3],确定改为备用电位器后,手柄性能没有受到影响。电位器的电源是24VDC,由手柄输出信号下游PRC420 电路板提供。这样,如果线路连接正确,将不会发生烧毁上下游其他连接设备的事故。
转向电位器(AZIMUTH POTENTIOMETER)外部接线资料如图7[4]所示。
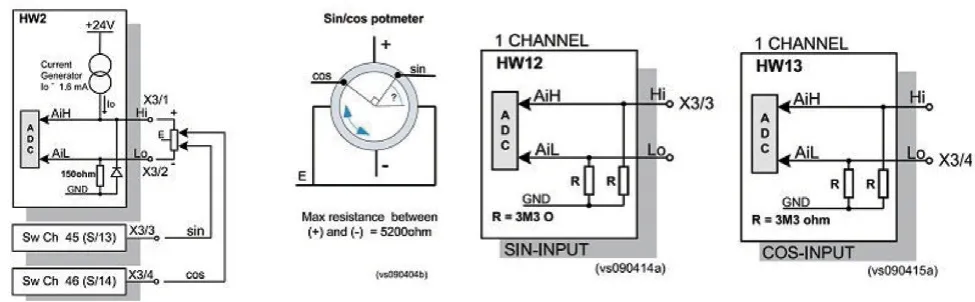
图7 转向电位器外部接线示意图
上图中X3/1 和X3/2 之间的电压,X3/3,X3/4 分别对地电压由各自的模数转换器(ADC)发送信号到下游RPC420通信控制器,进而得到手柄转向角度所对应的推进器转向角度信号。断开下游设备,接通万用表Ω 档,在转向手柄不同位置量得的电阻值,进行主备电位器的对比,结果差值在2%~5%之间。厂家给出的此电位器公差是±1%,虽然实际偏差超出了规定值,但是可以断定这么小的电阻差值,不会引起相关设备的损坏,有这个结论,已经够了。
接下来还需要重新排线。主电位器使用一根CAT5 级的工业网线通过P3 端口(6 针)(如图8 所示)和下游通信控制电路板RPC420 的X3 端口相连。备用电位器使用P7 端口(7 针)(如图8 所示)。

图8 主电器使用 P3 端口(6 针)和备用电位器使用P7 端口(7 针)示意图
显而易见,P3 和P7 端口都是RJ45 形式的,每根网线都由4 组共8 根双绞线组成,全部采用的是586B 的布线方式。但是P3 端口网线每根线的输出信号与P7 差别较大,调整比较麻烦,我没有采用更改P3 端口网线布置的方案,而是重新制作了一根586B 形式的CAT8 级的工业网线,代替CAT5 级的老网线,连接P7 端口和下游RPC420 的X3端口。并在X3 端口根据每根线路输出信号的功能重新排列线号,如图9 所示)【4】,使备用电位器端口输出参数适合RPC420 电路板P3 端口参数的要求。老的手柄P3 端口网线废除。(参考图3 手柄输出线路连接)

图9 在X3 端口根据每根线路输出信号的功能重新排列线号
4 结论
线路连接完毕后,给装置上电,没有出现报警,初始数据显示正常。试车后,发现转速还是有一点波动,但是完全在可以接受的范围之内,这次故障排除工作圆满结束。
上述解决故障方法并不复杂,很实用,可以省下大笔费用。建议使用此种手柄的单位可以采购一些SAKAE 公司的相同型号的电位器,以备不时之需。并且SAKAE 公司在上海就有授权代理公司,非常方便。
