一种测试油烟机风量的超声波系统
2023-02-07杨明月郑桐福郭丰碑
杨明月,郑桐福,鲍 明,郭丰碑,张 凯
(1.中国计量大学,浙江 杭州 310018;2.杭州老板电器股份有限公司,浙江 杭州 311100)
0 引言
油烟中含有大量的致癌物质,危害程度远高于吸烟。吸油烟机对于健康的重要作用,使吸油烟机的健康价值和环保价值逐渐成为消费者关注的重点。
吸油烟机利用离心电机带动涡轮通过负压将油烟气体吸入机体内部并排到室外。测量油烟机吸入风量时获得油烟的速度场信息是关键,包括油烟上升的速度大小和方向。
传统油烟机风量测量利用风速测试仪,精度对安装有严格要求。文献[1]根据电机的本身参数和运行参数,建立风量测试模型,对模型参数获取有高依赖性。机械式气体计量仪表存在机理性缺点,很难满足油烟机风量计量的需求[2]。此外,传统风量将测试点设定在油烟机后方风道中,常常会破坏排风通道结构,且因为设在后端,必然存在系统误差。本文设计超声波测量系统,在非接触、小压损的基础上,利用限幅滤波、算术平均滤波和卡尔曼滤波提升了测量精度[3],且换能器可以安装在油烟机前端,实际测量风量,结合物联网数据传输可对风量实时监控[4-7]。
本文利用粒子图像测速技术(Particle Image Velocimetry,PIV)对超声波流量计在风量测量时获取的风速信息进行精度验证[8]。PIV是一种非接触式全场无干扰测速手段,关键在于建立良好的光学成像和分析系统[9-10]。通过快速傅里叶变换(FFT)和灰度值等算法有效计算示踪粒子图像位移[11]。测量时,因为油烟粒子密度较大,不再外加示踪粒子。
1 系统总体设计
图1为基于时差法超声波气体流量计的风量测试系统总体方案设计。
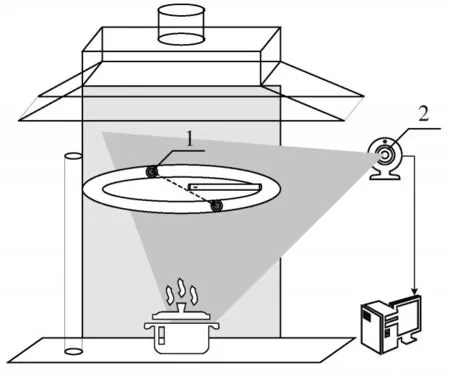
图1 风量测试系统设计图
图1中:1为超声波气体流量计所激发的一对超声波换能器,通过油烟上升时换能器之间的时差信号计算此截面中心处的风速,结合几何参数计算得到风量;2为PIV方法所使用的高速相机。两种方式测量同一时间、空间内风量,将结果进行比较和评价。
超声波方法测量风量硬件电路方面主要包括换能器、主控芯片、信号处理模块,算法和程序要满足功能的实现以及稳定性[12],利用前置限幅滤波、后置卡尔曼滤波算法与算术平均算法相结合的数据滤波算法,以有效提高风量计量时在高区和低区的计量精度和稳定性。
PIV方法测量风速包括:高速相机、激光器、发烟锅和用于控制采集图像的控制程序和测量比例标定程序,以及粒子图像处理和分析程序、流场速度矢量的显示和修正程序。系统框图如图2所示。
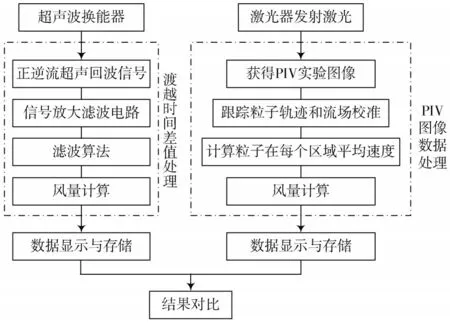
图2 系统总体框图
2 超声波法风量测量
2.1 超声波时差法测量风量的原理
图3为超声波气体流量计测量示意图。
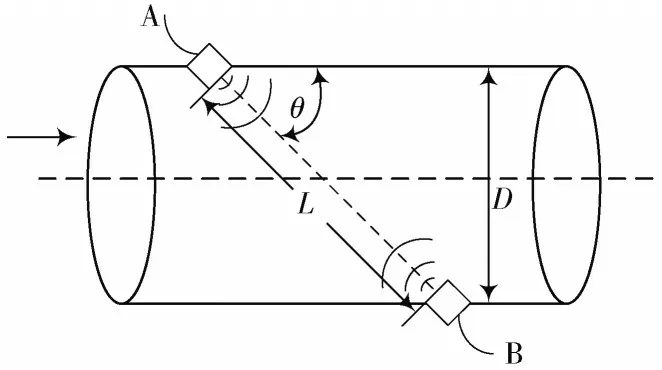
图3 超声波气体流量计测量示意图
本文采用时差法进行测量。时差法通过超声波信号在具有流速的介质中顺流、逆流方向的两次传播时间差值来求出介质在信号传播方向的平均流速[13],最后参考经验公式求得流体介质在截面上的平均流速,继而得到风量流量。
换能器A为顺风速方向换能器,B为逆风速方向换能器,规定油烟机风速自下而上为顺流向,在图3中则为自左向右为顺流向。换能器与油烟机风量来流呈角度θ安装,测量区域的当量直径为D,两个换能器之间的直线距离为L,气体介质中超声波的传播速度为c,在换能器路径上的气体流速即为线速度v。由A换能器发射、B换能器接收超声波的顺流时间tAB为:

而由B换能器发射、A换能器接收超声波的逆流时间tBA为:

结合上述式(1)和式(2),可以求出顺逆流时间差(Transit Time Difference,TTD),Δt中包含着流速信息v,Δt为:

式中:超声波声速远大于流体介质速度,即c2≫v2cos2α,分母中c2-v2cos2α简化为c2,得线速度vUltra:

由线速度vUltra求出瞬时流速和流量,要将线速度转化为面平均流速。根据流体的不同状态,有不同的修正系数[14]。设修正系数为K,则流体在一段时间ΔT∈[0,t]内的累计流量Q为:

化简为式(6),其中,S为流量截面的当量面积:

由于气体的可压缩性,对体积流量进行温度、压力补偿,进行工况和标况的转换:

式中:P0为标准大气压;P为风量测量点的绝对压力;T0为标准状态下的绝对温度;T为测量介质的绝对温度。
2.2 超声波法硬件总体设计
图4为超声波部分系统硬件框图,主要由主控芯片、计时芯片、激发信号放大电路、信号接收调理电路、LCD显示模块、电源模块和数据传输模块等组成。
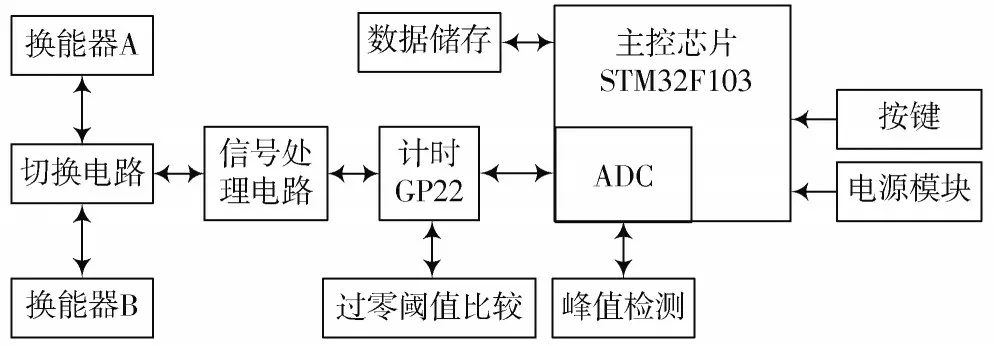
图4 系统硬件框图
32位单片机STM32F103作为主控芯片,通过SPI通信方式控制GP22片内脉冲器发出激励信号驱动超声波换能器,传播一段时间后被接收端换能器捕捉,并将声波信号转换为电信号,经过放大、滤波信号处理后送入计时芯片的STOP引脚,并通过捕捉上升沿信号后完成一次对时间间隔测量,并发出中断信号至主控芯片,主控芯片读出两次上升沿的间隔时间,即为单次信号渡越时间测量结果。顺逆流各自收发一次为一组信号可求出一组渡越时间,并根据式(3)~式(5)计算出换能器对射路径上的线速度vUltra和风量。
2.3 TDC-GP22电路产生激励信号
由于本文所设计的系统对风量计量的精度要求高,渡越时间的计时需要达到微秒级别,因此选用TDCGP22可达90 ps分辨率的单精度模式[15]。
该高精度计时芯片内部集成了脉冲发生电路,但为驱动超声波换能器,需对其激励信号进行电压放大,保证转换后的电信号能够具有一定的信噪比,便于后级电路的信号处理[16]。图5为方波激励信号经过TPS61085升压芯片电路后的实际激励信号。

图5 经过信号放大电路的激励信号
2.4 接收电路对接收波信号的调理
由于超声波信号在空气中衰减严重,接收端有效信号幅值仅为几十毫伏。设计中心频率为有效信号频率200 kHz的有源带通滤波电路,提高信噪比,最终得到幅值稳定在1.2 V左右的纯净回波信号,如图6所示。
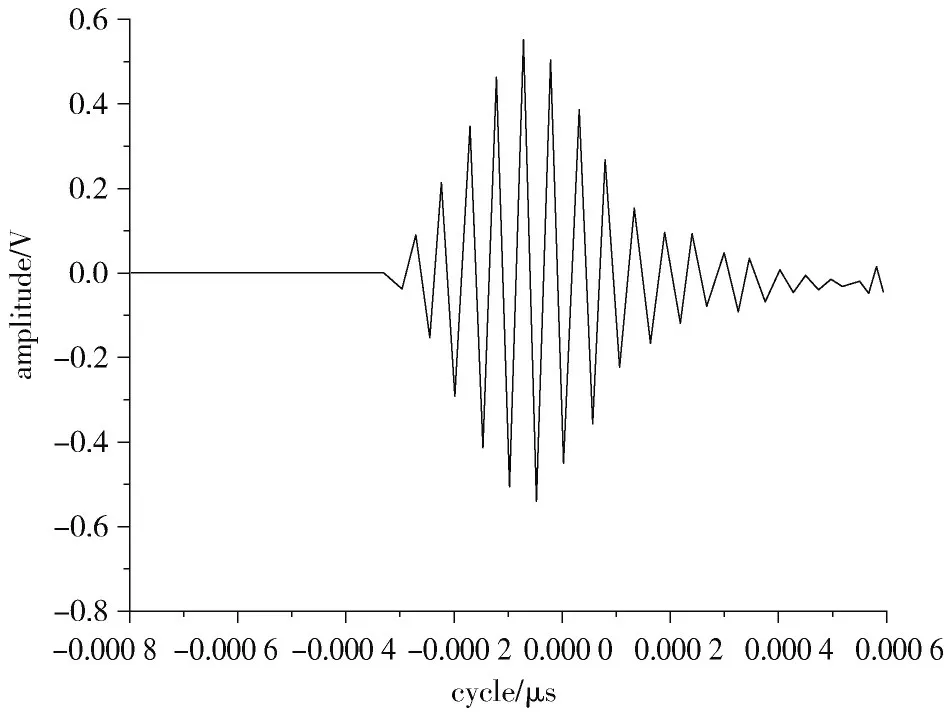
图6 接收电路处理后的信号
2.5 双阈值比较电路产生计时信号
由于方波信号是计数和计时的关键,为了避免干扰信号,采用软件控制可编程变阻器调整阈值比较电路的参数,只有当回波信号的幅值大于阈值电压设定幅值,才使能另一阈值为0 V的阈值比较电路的引脚,再由此过零比较电路产生使GP22停止计时的STOP信号。这种双阈值比较电路的方法,使得有用方波信号的个数一致,减少了信号的干扰[14]。图7中点线为经过双阈值比较电路产生STOP计时信号,GP22通过捕捉上升沿进行计时和停止。
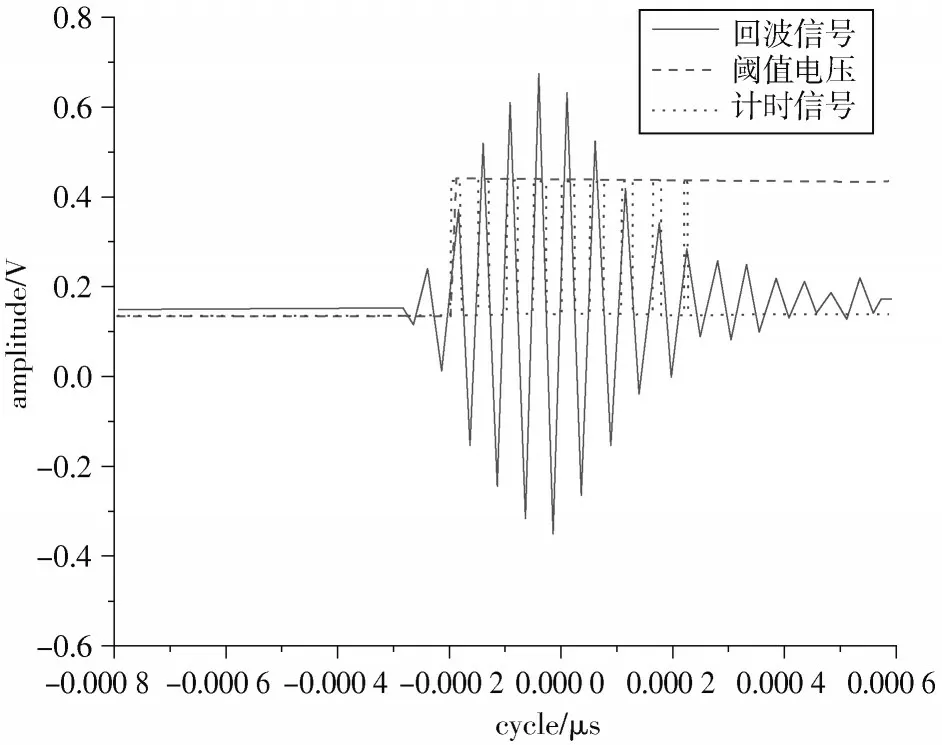
图7 阈值、过零比较电路产生STOP计时信号
2.6 超声波法软件数据滤波
超声波气体流量计测量的软件流程图见图8。
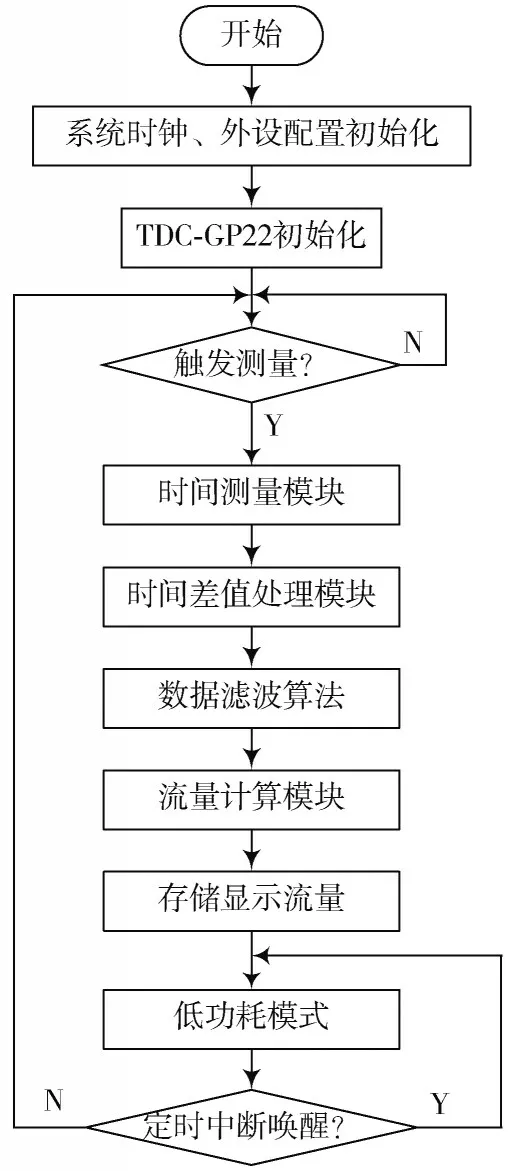
图8 软件流程图
时间测量完成后运行滤波算法对数据进行处理。原始数据中存在测量时引入的随机误差和粗大误差。针对数据的波动性、数据分布特征以及突变状态,选择相适应的滤波算法。对于大部分的滤波算法而言,滤波效果越平滑,算法的滞后性越大,在油烟机风量流速变化较为频繁的情况下,需要流速有良好的实时性,因此,采用的算法必须在满足较低时滞的条件下,保证风量计量的精度和稳定性[17]。
由于风速必须是连贯变化的,在测量数据时可以根据风速测量值之间的变化量进行滤波算法的设计。针对不同风量情况,提出一种前置限幅滤波,后接卡尔曼滤波算法与算术平均算法结合的时间数据滤波算法。
首先使用前置限幅滤波算法针对粗大误差进行调整。根据经验判断,确定两次采用允许的最大偏差值(设为A),每次检测到新值时判断:如果本次值与上次值之差≤A,则本次值有效;如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值[18]。这种算法可以有效地克服因偶然因素而引起的脉冲干扰,但此时电路引起的噪声还耦合在信号中。
针对这种现象,卡尔曼滤波算法与算术平均算法结合是一种很好的处理方式[19]。卡尔曼滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态,便于计算机编程实现,并能够对现场采集的数据进行实时的更新和处理。首先,将一次处理后的瞬时风量数据导入,判断其最大值与最小值的差值,当检测到有某一流速变化幅度大于或等于设定阈值δ时,认为油烟机风量测试段气体的流速处于快速变化阶段,此时需要提高采样频率Fs来跟踪流速变化,卡尔曼滤波算法尤其适用于此阶段,其具有较优的实时性和滤波效果。当测量值的变化值小于设定阈值δ时,认为此阶段的气体流速处于相对稳定状态,可以适当减小采样频率Fs,利用普通算术平均算法进行滤波处理。
通过测量值前后变化量将油烟机风量分为平稳阶段和快速变化阶段,采用卡尔曼滤波算法与算术平均算法能够有效提高流速稳定状态时的风量测量精度,同时能在很大程度上减少因为气体流速快速变化导致的时滞性误差。数据滤波算法流程图如图9所示。
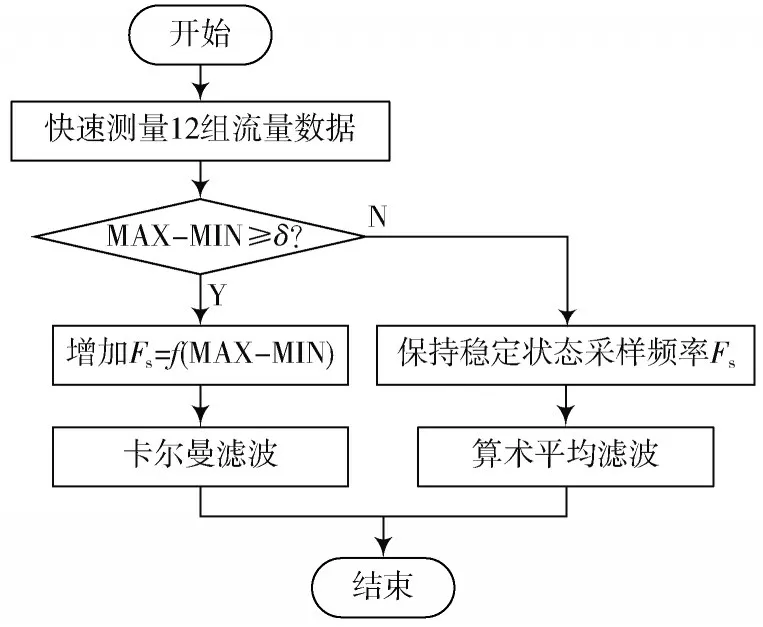
图9 数据滤波算法
3 PIV法风量测量
3.1 PIV方法风量测量原理
利用PIV技术对油烟上升的速度场进行处理,实现油烟整体上升的可视化,得到油烟的二维上升速度矢量图,具体装置示意图如图10所示。
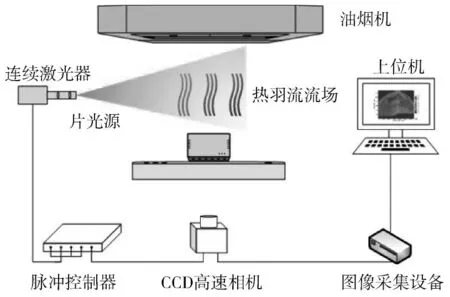
图10 PIV硬件装置示意图
首先对t1时刻和t2时刻的粒子图像A和B进行分析,将两个时刻的图像分割成固定大小的查询窗口(Interrogation Window),如图11所示。
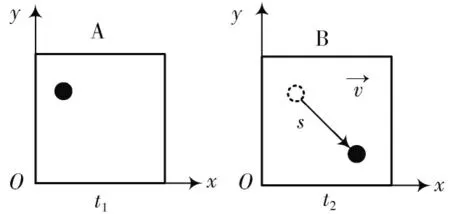
图11 PIV油烟示踪颗粒
接着,选取t1时刻的粒子图像A的查询窗口1计算其灰度值分布情况,通过互相关计算,搜索在t2时刻整体图像中与窗口1灰度值分布最为相似的部分(即互相关峰值),记为粒子图像B中对应的查询窗口2,查询窗口2相对于查询窗口1的中心位置的位移大小和方向作为该查询窗口内粒子的平均位移s和平均运动方向v→。
由于粒子图像A与粒子图像B之间的时间间隔Δt固定且足够小,可认为被测油烟机风量和运动速度在时间和空间上没有剧烈的波动。因此可以求出对应查询窗口的平均速度,并用该平均速度代替该位移方向上线速度的瞬时速度vPIV:

相邻Δt时刻的流场中一个示踪粒子在二维平面上的位移变化分别为Δx和Δy,该粒子所在位置流速表示为:
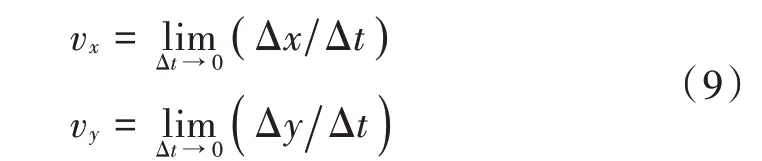
只要Δt足够小,ΔxΔt,ΔyΔt就近似为vx和vy。
3.2 PIV图像处理及速度矢量场算法改进
实验时首先载入油烟图像进行目标区域选取。实验中用到的高速相机帧速率设置为250 f/s,原始图像格式为tiff,通过PIV算法程序批量读取图像,根据油烟升腾所在范围大小设置油烟使能区域。
对读取的图像进行预处理,包括对图像进行曝光矫正、亮度调整以及图像去噪,将油烟粒子通过图像滤波算法使得油烟区域与背景明显区分,采用5×5中值滤波算子以及5×5高斯滤波算子分别对油烟图像进行滤波处理,可有效去除图像椒盐噪声和高斯噪声。
之后进行迭代窗口网格划分及参数标定,时间步长为4 ms,油烟机距离油烟发生装置的垂直高度为500 mm。
随后进行油烟粒子平均速度求解,通过迭代网格设定,油烟图像被分割为一个个小的检测窗口,其中散布着油烟粒子,将相邻两帧图像中的油烟粒子通过前述平均速度求解算法进行计算,即得检测窗口内的油烟粒子在一个时间步长内移动的距离,同时时间步长已知,进而可计算出粒子的平均速度。
最后进行流场速度矢量的矫正与显示,通过油烟粒子的平均速度值,包括水平方向平均速度值和竖直方向平均速度值,根据二维插值算法对其中偏离正确范围的值进行线性插值矫正,最终得到整个油烟测量流场范围内的流动信息,输出油烟上升的速度矢量图以及油烟速度变化曲线图。
PIV图像处理及速度矢量场算法总体框图如图12所示。

图12 PIV油烟粒子处理算法
考虑到在实际计算中,直接使用互相关计算所需的计算量较大,因此采用快速傅里叶变化(FFT)简化计算量。首先将查询窗口内的粒子灰度分布值通过FFT变换到频域中,与其共轭灰度函数进行相乘运算后通过反变换至时域中实现互相关运算的快速求解,进而可以快速定位互相关峰值,得到该区域粒子的平均位移,使得整体计算的速度得到提高,PIV油烟粒子互相关算法原理图如图13所示。
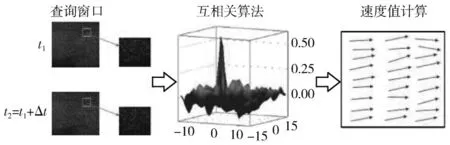
图13 互相关算法处理油烟粒子原理图
4 实验结果与分析
4.1 超声波法零点漂移分析
在同一条件下,采样了抽油烟机风量为零时,原始零点漂移时差数据和经过滤波算法的零点漂移时差数据各200组,分别标记为样本1、样本2。滤波前后零点漂移对比如图14所示。
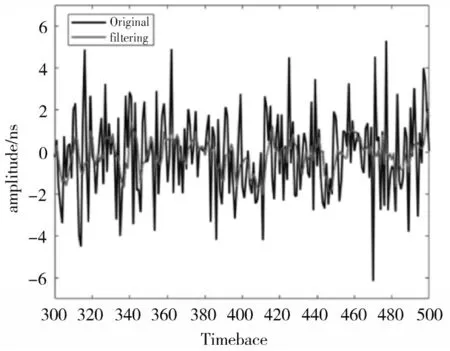
图14滤波前后零点漂移对比
图14 中,黑色线条代表超声波法测量风量的零点漂移数据样本1,系统零点漂移范围保持在±10 ns以内。灰色线条则代表由限幅滤波结合卡尔曼滤波和算术平均滤波后对比得到的零点漂移数据样本2,系统的零点漂移数据范围达到±2 ns以内。由此证明,本文滤波算法能够明显提高时间差的计量性能,为后续风量计量精度提供保障。
为了描述数据滤波前后时差信号的离散程度,引入样本标准差的定义:

式中:S为样本标准差;Xi为时差值;为样本均值;n为样本数量。
表1分析了两组样本的零点漂移情况。最大值与最小值之差的大小表示样本数据的范围大小,样本数据范围越小表示数据越稳定;而标准差越小,则表示样本分散程度越低[20]。由此得知,样本2的数据更为稳定,且分散程度更低。
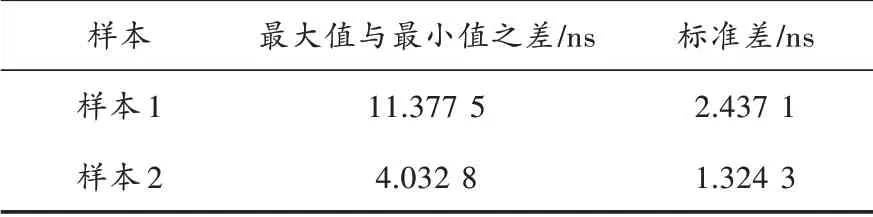
表1 零点漂移数据分析
从以上分析可以得出,本文数据滤波算法能够有效地降低超声波法测风量系统的零点漂移,提高测量精度。
4.2 实验数据分析
实际超声波法实验部分的现场布置如图15所示。换能器距离油烟示踪颗粒的产生装置底部垂直距离约为300 mm,距离顶部油烟机风口约为200 mm。
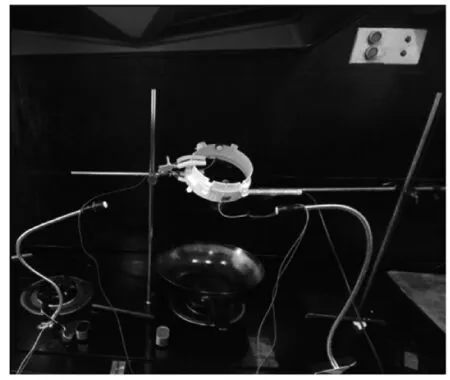
图15 超声波法现场图
系统可测量风量的量程范围为0.25~60 m3/h,量程比R值选取240,精度等级为1.5级,经过风量区域等效直径换算,满足油烟机风速最高值2 m/s的量程要求。
为了验证超声波法风量测量的效果,本文测量了分布在低区(流速低于1 m/s)和高区(流量大于1 m/s)各3个流量点,每个测量点重复测量3次,该测量点油烟机的风速以及风量分别如表2和表3所示。
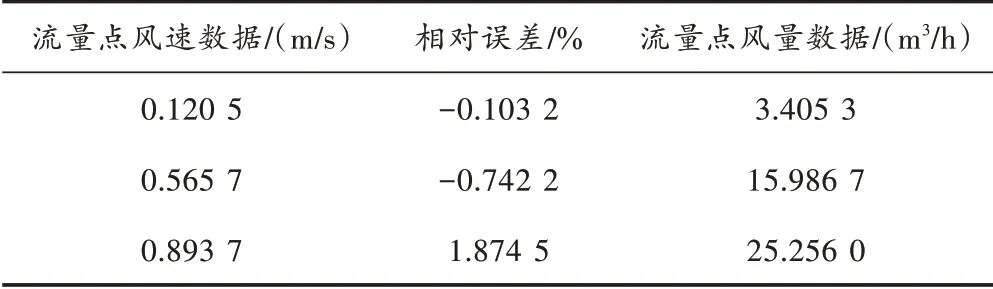
表2 超声波法油烟机低区测量结果
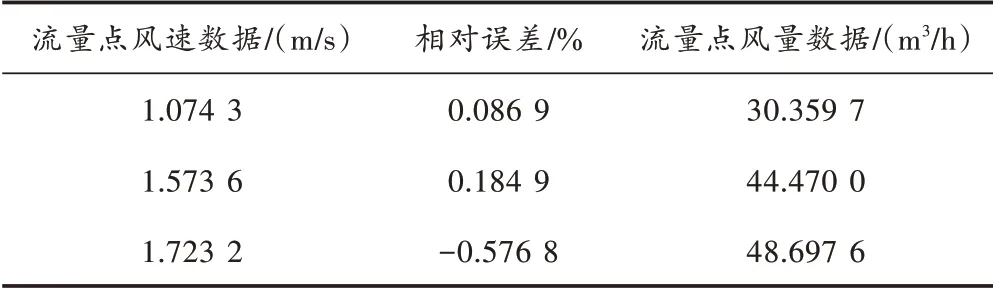
表3 超声波法油烟机高区测量结果
表中计算相对误差的公式为:

式中:E为实际相对误差,一般用百分数给出;Δq为绝对误差,即测量值与真值之差;q为真值,实际计算中以均值替代真值。
图16是各个风量测试点的相对误差图,其中虚线条代表流量计的误差极限,实线条代表实测数据误差值,从图中可以看出,超声波法测量风量的数据误差在误差极限内,整个区域内的测量稳定性较好。
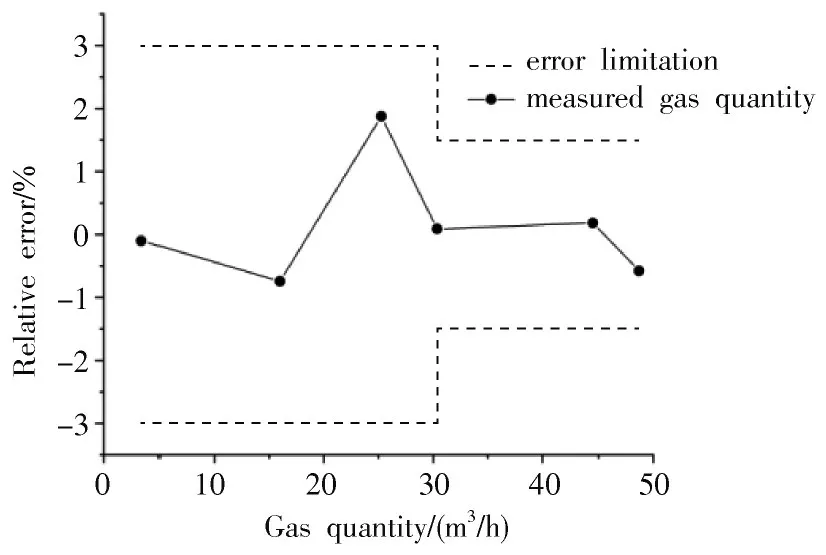
图16 超声波法风量相对误差
4.3 PIV法风量实验数据
实际PIV法实验部分的现场布置如图17所示。图中包括吸油烟机1、光源2、发烟锅3、喷水管4、高速相机5。图18为PIV法高速相机拍摄到油烟上升过程中的一帧图像,实际处理时截取油烟上升前5 s图像,共1 250张图像,将其批量导入到上位机中,通过图像预处理和滤波算法处理后,油烟上升过程的速度矢量图如图19所示。

图17 PIV法现场图
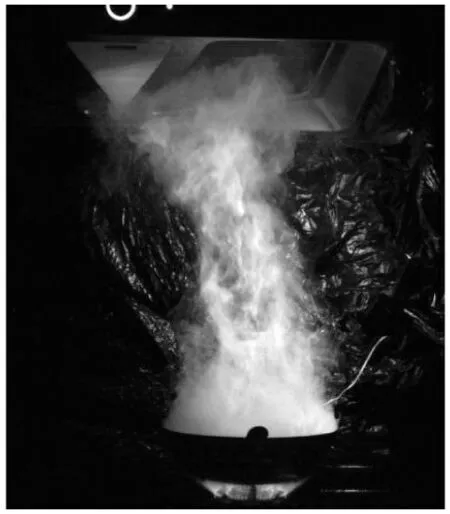
图18 PIV法油烟上升过程原始图像
其中图19a)为高区速度矢量图,图19b)为低区速度矢量图,取向上为油烟上升速度的正方向。
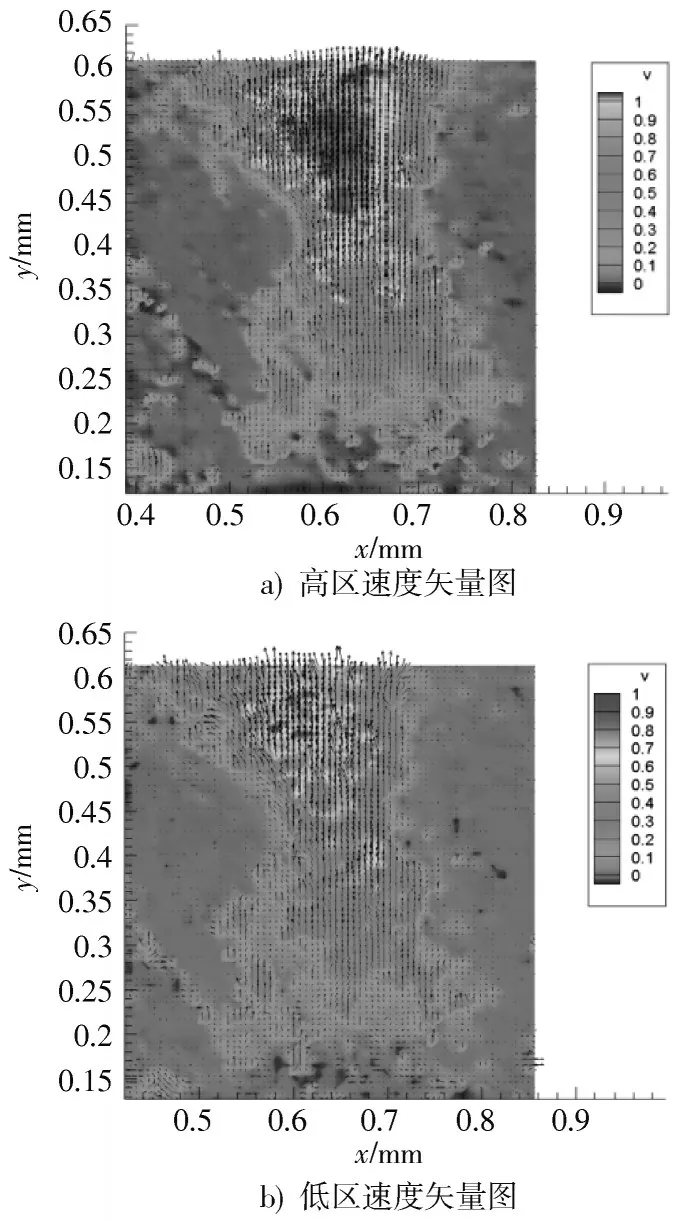
图19 PIV法油烟机速度矢量场图
提取油烟上升的轴线方向速度值作为超声波测量装置测量结果的对比验证,PIV法油烟轴线上升速度与其油烟上升高度的曲线图如图20所示,其中vl为低区油烟轴线速度,vh为高区油烟轴线速度。
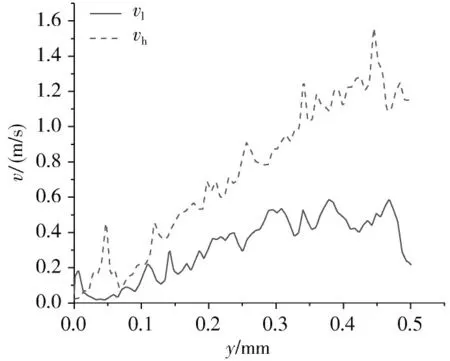
图20 油烟轴线上升速度图
4.4 数据分析
为了验证超声波法风量测量的效果,已知超声波法实验时超声波换能器布置在距离PIV法油烟示踪粒子产生处上方300 mm处,因此,选择同样位置的PIV风速结果进行对比。所测油烟机的风速以及风量对比结果分别如表4和表5所示。
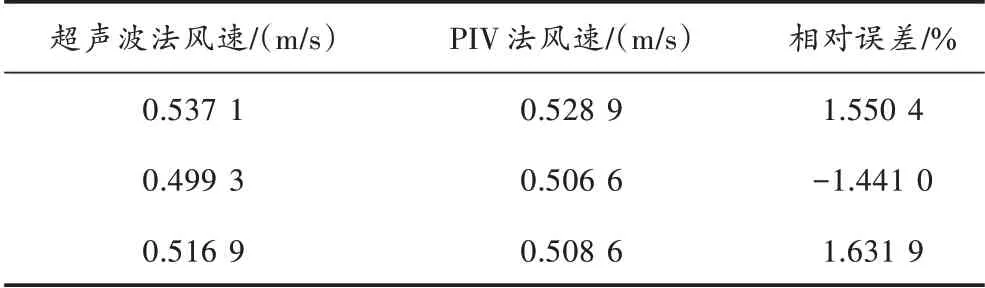
表4 超声波法和PIV法低区测量结果
表4和表5显示出了某低区流量点和某高区流量点的三组数据,分别由超声波法和PIV法测得,并对同一流量点数据进行相对误差计算,如图21所示。
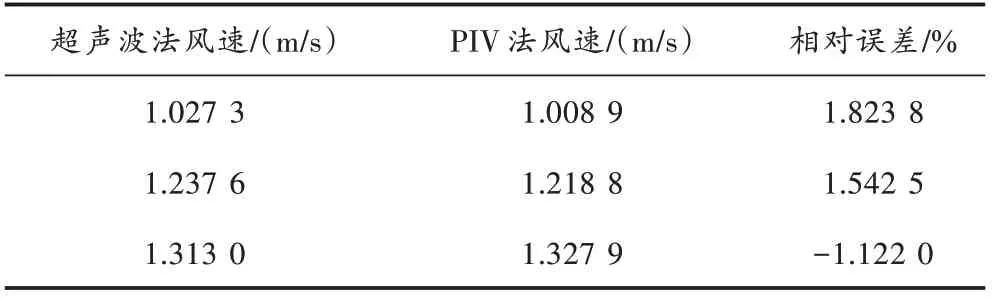
表5 超声波法和PIV法高区测量结果
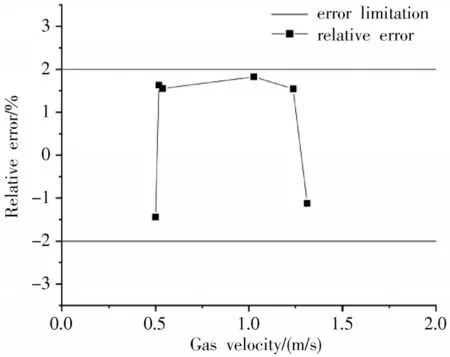
图21 超声波法与PIV法流速对比
通过对比数据可以发现,超声波法与PIV法应用于油烟机风量的风速测试时,相对误差ΔE最大值为1.823 8%,出现在低流速与高流速区域分界值附近,总体误差均不超过±2%的误差极限。
5 结语
为了解决传统的油烟机风量计量存在的问题,本文利用时差法的原理,设计了一个基于超声波气体流量计的油烟机风量测试系统,并通过与粒子图像测速法(PIV)在同一实验条件下的测试结果进行对比,得出超声波测油烟机风量是可行的结论。实际实验中超声波方式与PIV方式测量的结果误差在1.052%范围内,提高了风量的计量精度。
