组合模型在基坑监测中的应用研究
2023-02-05杨纪勉
杨纪勉
(拓远(福建)勘测规划有限公司,福建福州 350002)
0 引言
选择科学、合理的基坑监测方案是保证基坑安全、施工顺利的重要前提,较好的基坑监测方案能够优化施工方案设计,并为施工安全提供可靠依据。基坑监测的实施能够及时提供施工监测信息,预测可能发生的危机,进而保证建筑物建设质量,有效降低事故发生概率。但在施工过程中,不可避免地会有突发情况,产生不稳定因素。因此,在基坑工程施工中,应始终确保基坑变形量在规定的安全范围内,保证基坑工程及周围建筑物的安全。这就要求要密切监测基坑变形,在施工过程中,以施工监测为基础,运用方法合理分析,最终达到预测的目的。
对基坑工程事故进行分析,可以看出,随着城市化进程的加快,基坑工程事故的发生与以往相比明显增加,特别是在我国东南沿海开放城市中,一些大型基坑工程事故占总量的1/3 左右[1]。这要求更加重视基坑监测,防范此类事故,保护社会资源和人民生命财产安全。因此,如何根据已知的、少量的观测数据,建立准确的预测模型,是当前的研究重点之一[2-3]。基坑监测工程在国外开展得比较早,最早在20 世纪40 年代,Terzaghi 和Peck 等研究人员就开始研究基坑工程,他们运用数学方法,使数学估计理论开始服务于深基坑工程,并在成果中全方位评估工程施工过程中建筑稳定性[4]。20世纪70 年代之前,我国大多数基坑的深度都在10 m 以内;80 年代后期,大型深基坑才开始逐渐增多[5]。面对深基坑变形监测,我国众多专家学者对此进行了深度分析与研究。李宏义分析了基坑变形灰色预警系统[6],钟正雄建立了基坑监测数据库管理系统[7]。在2001 年,胡友健等建立了监测数据处理与预测报警系统,该系统以GM(1,1)理论构建形变预测模型,以支护结构水平位移、位移与开挖深度比、水平位移变化速率等指标进行险情预报[8]。徐洪钟等建立基坑光纤光栅检测系统,使我国的基坑监测研究事业又更进一步[9]。此外,考虑到利用水准仪、经纬仪等传统测量设备进行基坑监测的不足,张建文开发了基坑工程远程安全监测系统,为基坑工程的施工提供科学建议[10]。近年来,于清华利用线性回归、灰色GM(1,1)模型及二者组合模型进行综合对比,经过验证得出的组合模型结果更为可靠[11];杜建广在传统AR 模型的基础上,创建了一种基于经验模态分解方法的差分灰色神经网络模型,解决了模型中预测结果精度较低和稳定性较低等问题[12];针对人工神经网络预测模型存在的不足,邢旋旋提出将附加动量法和自适应学习速率法应用于人工神经网络,建立了基于时间序列和影响因素的BP 神经网络预测模型[13];谢荣华先探究了曲线拟合、自回归法和指数平滑法在基坑监测中的可靠性,再利用蚁群算法将上述三种模型进行组合,预测结果优于单一模型[14];侯跃强提出串联式组合模型的概念,介绍了串联式组合模型的两种构建形式,并用实例验证了串联式组合模型的可靠性[15]。
借鉴已有的研究成果,本文利用实际工程案例,对单一模型和组合模型的形变预测精度进行了比较分析。结果显示:相较于单一模型,组合模型的预测结果更为可靠,该结果对基坑工程的实际应用具有一定的参考价值。
1 预测模型
1.1 灰色系统模型
灰色系统理论于1982 年由中国学者邓聚龙提出[16],经过多年的发展之后,已经成为一门新型的学科结构体系,现已广泛应用于生态、社会等各个领域,发展前景十分广阔。灰色系统将系统的行为看作是随机变化的过程,基于信息的非完全原则,利用原始数据来探究变化规律。然而在实际中,不一定能找到规律或者找到的规律不适用于所有情况,不具有典型性。但是尽管数据离散,在将其累加之后也会出现指数变化规律,这也说明它必然存在内在的客观规律,需要进行深度探究。将数据转化成微分方程,建立数学模型,然后不断对模型优化改进。
GM(1,1)模型是目前使用较为广泛的一种模型,该模型通过将历史数据序列x(0)主次累加,生成新的数列,弱化数据中的随机性,进而提高预测精度。设原始监测序列x(0)=(x(0)(1),x(0)(2),…x(0)(n)),然后按照模型构建原理对x(0)进行一次累加,得到数列x(1)=(x(1)(1),x(1)(2),…x(1)(n)),如式(1)所示:
根据灰色理论对x(1)建立一阶灰色模块的白化形式微分方程,如式(2)所示:
式中:a,u为待求系数。一阶微分方程求解得
式中:
从式(3)可求解出系数向量a、u,再根据初始条件,可得
对x(1)进行逆变还原处理,可得GM(1,1)预测模型方程为
灰色模型通常用后验差检验法检验精度。其精度由均方差比值和小误差概率共同评定。其具体步骤为
设X(0)为原始序列,X(0)为GM(1,1)模型模拟序列,e(k)为残差序列,则有:
残差结果计算完成后,分别计算原始数据序列x(0)和残差绝对值序列e(k)的均方差S1和S2:
其中
然后计算后验差比值C:
最后计算小误差概率P:
根据精度检验要求,均方差比值C尽可能小,指标P尽可能大。
1.2 时间序列模型
时间序列顾名思义就是随着时间变化而变化的,随机的且前后有联系的观测数据,按照时间顺序,排列成一个有序的数列。
时间序列(AR)模型的建立,时间序列1,2,…,n)的自回归(AR)模型为
式中:φ1,φ2,…,φp为自回归模型系数;P为模型阶数。
误差方程为
其矩阵形式为
式中:
在VTV=Min 时,模型参数最小二乘解为
1.3 灰色时序组合模型
每个预测模型都有其适用的条件范围,同时这也代表着每一个模型都有其局限性。若单一模型在预测的过程中,适用条件发生变化,则该模型预测精度将大大降低。此外,单一模型对于信息的利用率较低,无法充分利用有效信息,这也将降低预测精度。
组合预测模型就是将各个单一模型提供的数据信息进行综合,将有限的信息充分利用。它可以避免单一分析方法易受环境因素干扰的缺点,也可以避免由于偶然误差因素造成的数据结果失真。
灰色模型与时间序列模型相结合称为灰色时序组合预测模型。灰色模型是利用原始观测数据,对数据进行累加,弱化数列的随机性,加强数列的规律性,进而达到预测效果,但对随机信号却无法进行处理。时间序列的模型预测不同于灰色模型,它依据时间顺序,利用数据的自相关性建立模型,分析数据规律,从而对未来数据进行预测,但其往往要先进行时序的零均值化和平稳化,才能进行建模。灰色模型与时间序列模型的组合模型可以充分利用两者的优势,先用灰色GM(1,1)模型进行预处理,提取数列的趋势项,再利用AR 模型处理数列的随机残差,这样既可以达到更高精度的预测效果,也可以规避单一模型的不足之处。
两种模型组合方式为
式中:dt为趋势项;为序列Xt的非平稳部分;yt为Xt提取dt后剩余的平稳时序。
2 工程实例
现以一工程实例说明组合模型在基坑监测中的精度。某基坑支护结构为水泥搅拌桩-锚杆,在基坑周围布置了测斜管,某一测斜管的观测结果如表1 所示。

表1 测斜管-2.0 m 处测点水平位移观测值单位:mm
选取前20 期监测数据,分别利用GM(1,1)模型、时间序列模型和灰色时序组合模型对数据进行处理,并将预测结果与实测数据进行比较,结果分别如表2 和图1 所示。
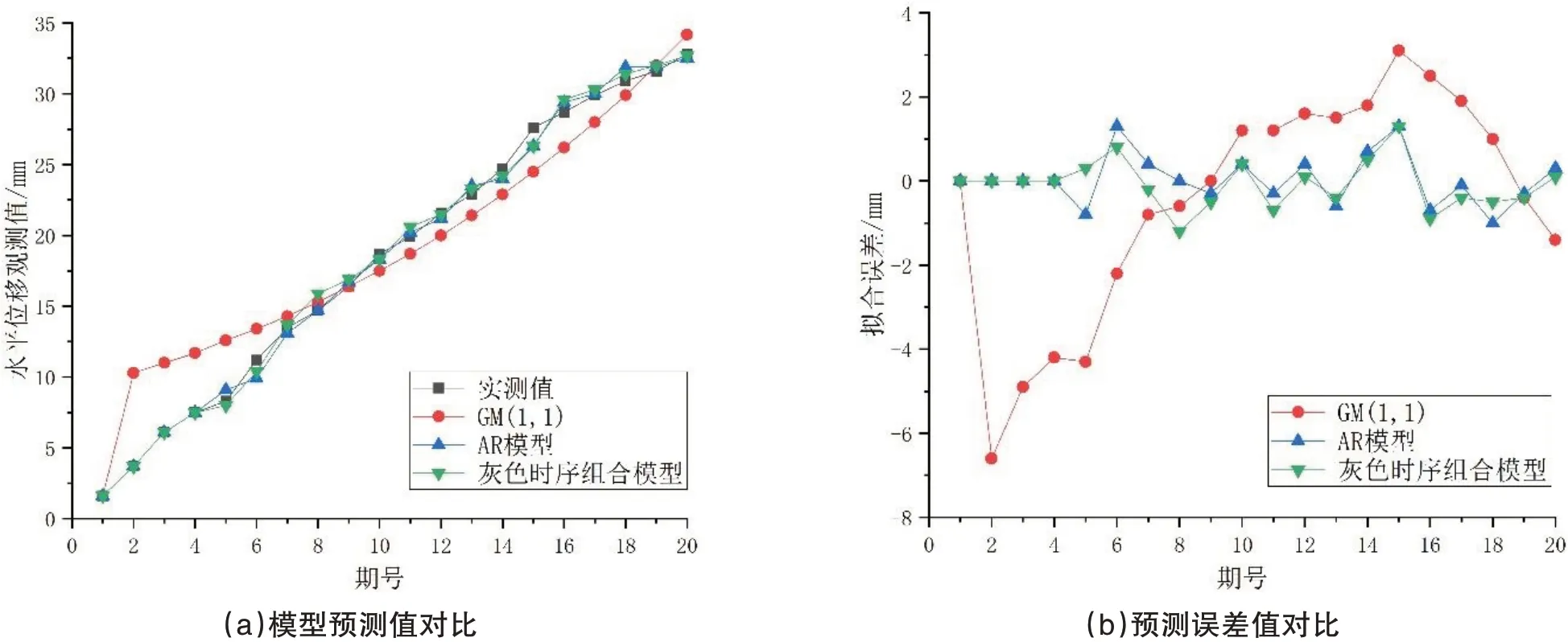
图1 模型预测结果

表2 20 期数据预测结果单位:mm
经过计算,3 种方法的评价精度分别为0.9640、0.9985 和0.9987,不难发现组合模型的精度最高,预测效果最好。
利用已建立的预测模型对后3 期数据进行预测,其结果分别如表3 和图2 所示。
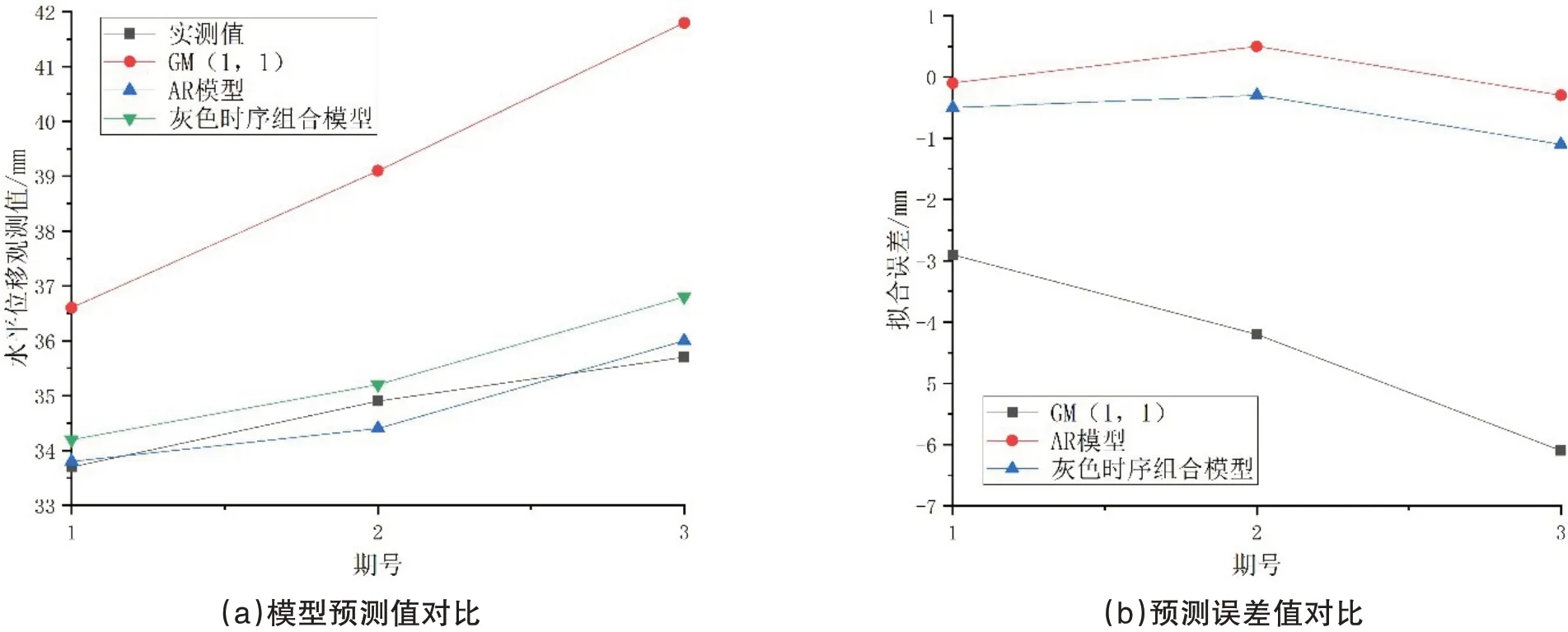
图2 模型预测结果

表3 3 期数据预测结果单位:mm
由图2、表3 可知:通过对后3 期数据进行预测检验,进一步证实组合模型预测效果为三者中最好的。
3 结语
基坑监测是基坑工程建设的基础,也是保障施工安全的关键环节,因此要对其加以重视并监测到位。本文对基坑监测所用的预测模型进行详细地阐述与多角度探究,通过具体工程实例,对不同预测模型进行了对比分析,得出组合模型能充分利用单一模型的优势,提高预测的可靠性。在对组合模型原理知识理解的过程中,通过结合工程实例分析组合模型预测效果得到了一些有效结论,仍然存在瑕疵,还需深入研讨:在实际工程中,不仅利用单一模型和组合模型来预测精度,还要研究在不同的工程中各类模型的适用范围以及优点和缺点;模型的适用范围是有限制的,当新数据加入后或者实际工程的影响使数据发生变化,则预测模型的精度会大大降低。所以应该结合实际情况,加入数据修正模型,以适应实际工程中各数据的变化,从而达到更好的预测结果。
