基于图像处理的桥梁表面裂缝识别研究
2023-02-02廖祥灿姚玉凯
廖祥灿,姚玉凯
(山东理工大学,山东 淄博 255000)
目前,中国正值基础建设的高峰期,道路桥梁建设十分迅速,据交通运输部发布的公报称,中国桥梁数量已超过80万座[1-2]。对于任何一个桥梁的工作服务周期而言,桥梁建设是一个相对很短的阶段,其运营管理通常长达100年[3-4]。同时,过重车辆增多和超载现象频发,对桥梁的损害尤为严重,也对桥梁本身的性能要求越来越高,桥梁的检测和维护工作尤为关键[5-7]。但现实中,普遍存在桥梁管理和养护部门力量不足、检测技术和方法比较落后等问题,造成桥梁在发生病害后无法得到及时发现和养护[8-10]。据不完全统计,近几年国内桥梁事故已经造成109人死亡,90人受伤,经济损失巨大。因此,如何高效、准确、经济、及时地获取桥梁病害信息已成为桥梁检测亟待解决的问题[11-15]。
1 桥梁表面影像裂缝病害的分割识别
由于长期暴露在外界环境中,桥梁上的部分病害区域与背景区域在桥梁表观影像上呈现出较低的对比度,甚至出现某些裂缝间接性断裂等问题,这给病害的检测提取造成极大干扰,进而严重影响到影像分割的质量[16-19]。桥梁表面裂缝病害识别的流程如图1所示。
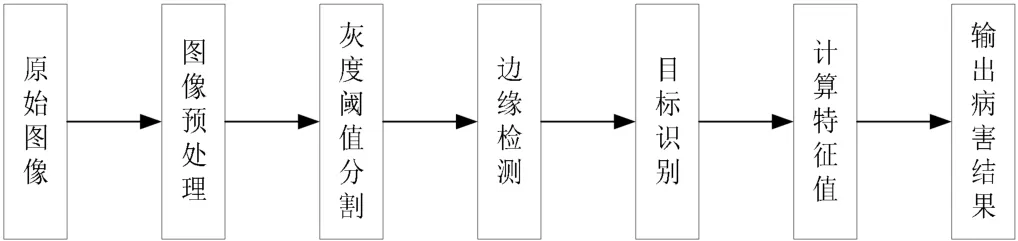
图1 桥梁表面裂缝病害识别流程
通常情况下裂缝呈线状走向,在经过图像二值化处理及滤波去噪后,可使图像上的裂缝区域逐渐凸显出来[20]。通过对二值化后的图像进行长短轴之比的特征判断,即可实现对桥梁表面裂缝病害的有效识别。
1.1 边缘分割
想要实现对一幅图像进行目标对象与背景部分分割的目的,往往需要根据这2部分区域之间的差异进行目标对象的提取,而二者之间的差异往往体现在其公共边缘部分。通常情况下,该边缘部分两边的像素灰度值存在着较大的差异,这是进行图像分割的重要依据。
图像的梯度算子的计算公式如式(1)—式(6)所示,可见其实质为该函数对应的一阶导数算子。

对应的欧式距离梯度幅值和方向分别如下:
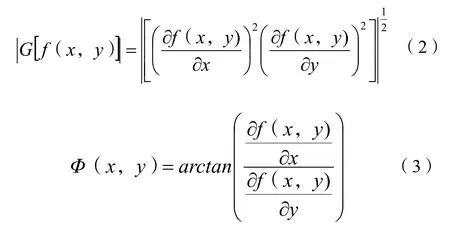
简化可得:

其中:
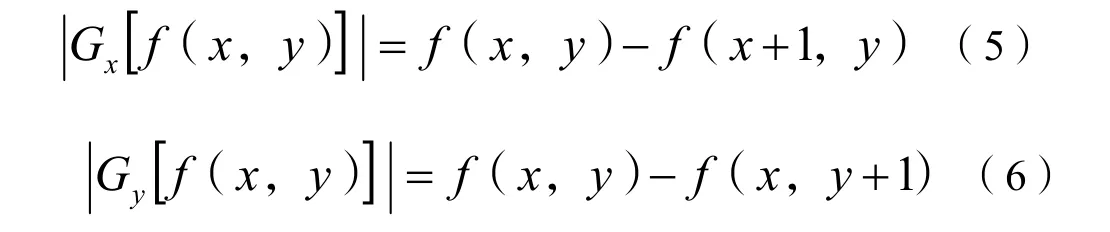
本文采用小区域模板对该图像进行卷积运算,以此来避免对每个像素进行计算所导致的较大数据运算量的产生。
1.2 连通区域
在计算机语言中,通常使用链码的表示方式对目标对象的边界部分进行表示,即使用同时具有长度与方向的线段对边界进行描述。通常情况下,同一幅图像中所使用的链码长度均相同,且对边界起点使用绝对坐标进行描述,其他点均采用与起点之间的偏移情况来进行位置描述。
在计算机可理解范畴内,边界即为边界处相连而成的像素点的集合,目前进行边界描述的最经典的方法是方向链码法,它通过曲线的起始点的绝对坐标以及曲线上相邻像素点之间所组成线段的斜率来表示2个像素点之间的位置关系。
1.3 裂缝的识别和判定
对于裂缝目标的提取需要根据其特征要素(如形状、面积及外接椭圆长短轴之比等)进行目标判读,但获取到的目标像素点中除了裂缝目标以外,可能还有少部分的干扰噪声存在其中。因此,还需要集合其灰度特征对筛选出的目标像素进行进一步判别,以更深层次地确定目标像素是否为裂缝。由于实际影像中的裂缝与周围背景相比呈黑色分布,且这2部分的灰度值存在较大差异,因此提取所得的裂缝像素点通常在局部区域呈现较小的灰度值。
本文采用二值化后图像的连通区域长短轴之比,求得裂缝目标的最小外接矩形内部的像素点的灰度均值差,进而与确定的阈值进行大小比较来实现裂缝目标的最终判别。识别效果如图2所示。

图2 裂缝的识别和判定
2 病害影像检测系统开发及实例验证
2.1 开发平台
本文采用商业数学软件MATLAB(Ra2014)版本进行本次图像处理系统的开发。
2.2 总体结构
2.2.1 模块设计
基于本次桥梁表面裂缝病害检测的实际需求,本文开发了基于MATLAB图像处理的有关桥梁表面裂缝检测的程序。考虑到基于实际情况所要实现的软件功能,可将软件的模块分为以下4个部分:①文件信息模块。该模块包含图像名称、尺寸大小及其所存储路径等属性。②操作模块。该模块主要包括主菜单、子菜单及命令按钮,对数据的处理操作均在该模块实现。③结果显示模块。在对图像进行处理后,需要将其进行展示,以便操作人员对处理后的图像效果进行检查并可对处理所得的数据参数进行查看。④数据存储与导出模块。在对图像进行处理后可得到对应操作的新的数据图像,用户可利用该模块对生成的数据进行存储;此外,该模块还可生成新数据图像所对应的分析报告,以便用户对该图像处理操作后所得的数据成果进行评价。
2.2.2 工作流程
本次所开发的系统主要用于对桥梁表面的裂缝病害影像进行分割与识别。以下将对图像加载后要进行的一系列工作流程进行简要介绍,其流程如图3所示。
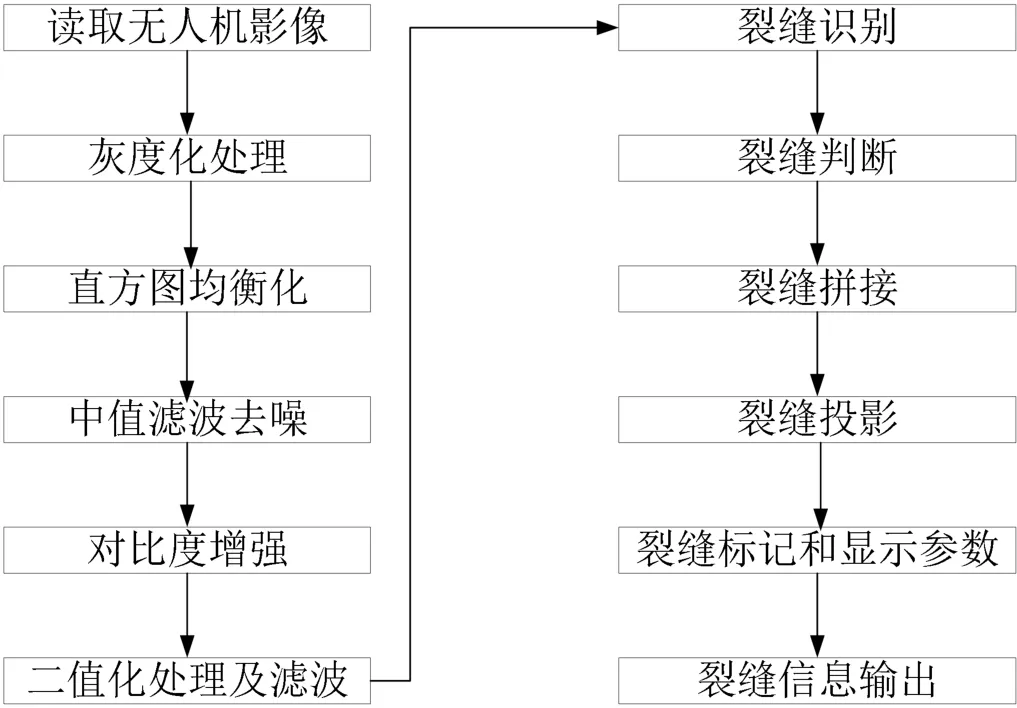
图3 软件工作流程
2.3 实例验证
2.3.1 数据来源
本研究中的桥梁裂缝数据通过SDNET2018桥梁裂缝数据集选取。SDNET2018包含超过56 000张开裂和非开裂混凝土桥面、墙体和路面的图像。该数据集包括0.06~25 mm宽的裂缝;该数据集还包括具有各种障碍物的图像,如阴影、表面粗糙度、缩放比例、边缘、孔和背景碎片等障碍物图片[21]。
2.3.2 裂缝识别实例演示
载入图像及灰度化:在MATLAB环境下,运行主程序Main后,进入Guide打开桥梁表面裂缝检测程序并运行。在处理模块载入图像文件中的裂缝影像,例如在对话框中选择裂缝影像1.JPG,图像显示在主界面的左窗口中。
在载入图像后,经过处理转为灰度图,详情如图4所示。
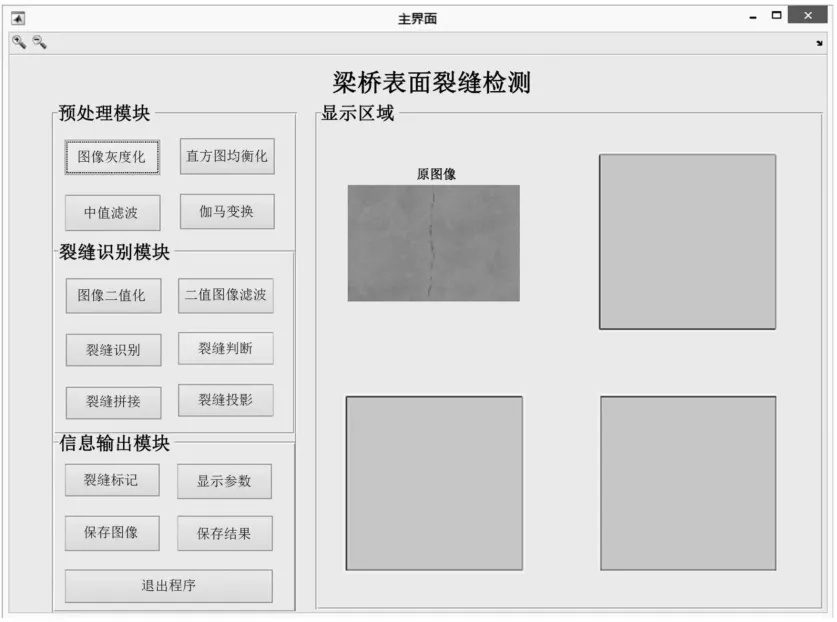
图4 载入裂缝影像及灰度化
直方图均衡化:将裂缝影像进行直方图均衡化,将裂缝影像的灰度范围扩大到0~255,获得较大的灰度动态范围,如图5所示。
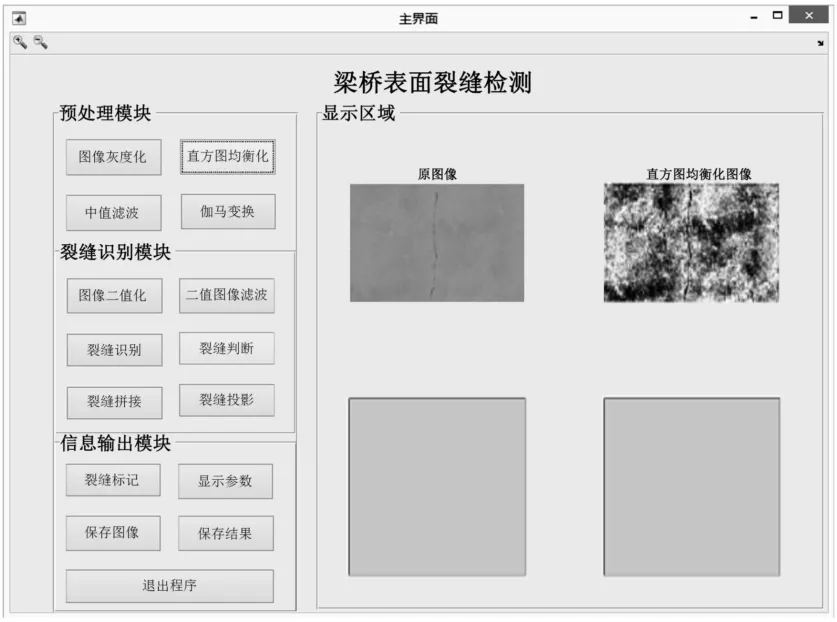
图5 直方图均衡化
中值滤波:裂缝影像在采集或传输的过程中,往往会受到成像设备和传输介质等因素的干扰而产生噪声,干扰实验结果的判断。经过中值滤波后,裂缝影像的白色噪点明显减少,如图6所示。

图6 中值滤波
对比度增强:裂缝影像由于在室外采集,容易受到大气、阳光、无人机机械振动等因素的影响,造成裂缝影像整体偏暗或偏亮。对比度增强(伽马变换)后,可以明显改善裂缝影像的整体照度,更利于后面裂缝的识别,如图7所示。
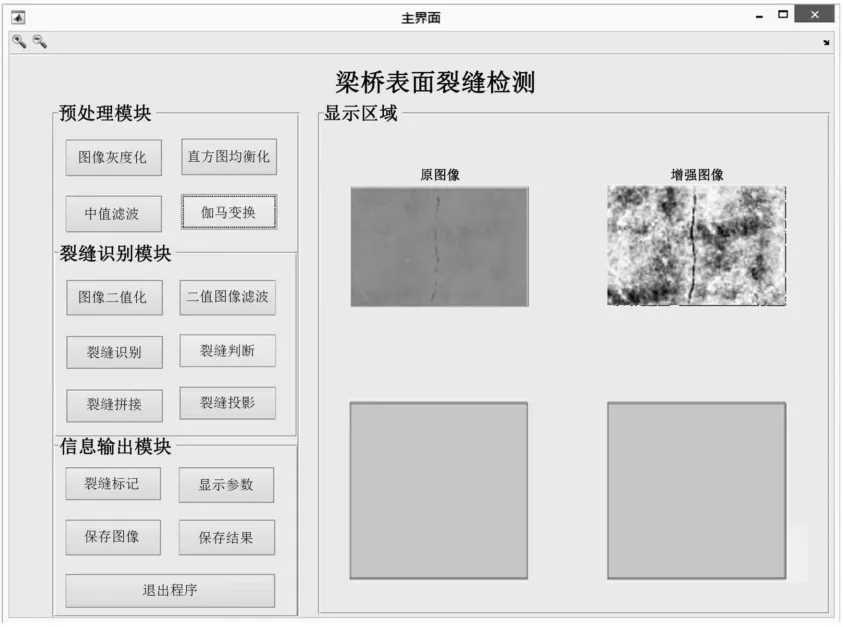
图7 对比度增强(伽马变换)
二值化处理及滤波:由于裂缝识别关心裂缝及周围的纹理信息,将图像转换为二值图像后,保留了裂缝的边缘和形状信息,简化了其纹理信息,这样可以提高裂缝识别的速度和效率,如图8所示。
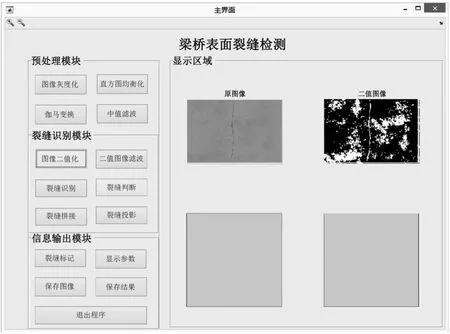
图8 裂缝影像二值化
同时由于裂缝背景往往存在大量的细小空洞,需要进行二值滤波,得到更好的裂缝二值影像,如图9所示。
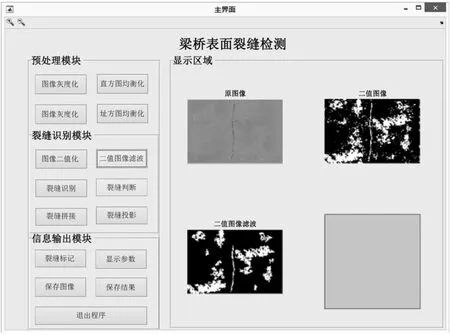
图9 二值影像滤波
裂缝识别和判断:经过二值化和二值滤波后的裂缝图像,通过二值连通区域长短轴之比的特征对裂缝进行识别和判断,如图10所示。

图10 裂缝识别和判断
裂缝投影:将已识别的裂缝影像进行裂缝拼接,为了获取裂缝区域的信息,采用像素积分投影的方式将裂缝的水平和垂直方向的积分分别投影,并绘制投影曲线,如图11所示。
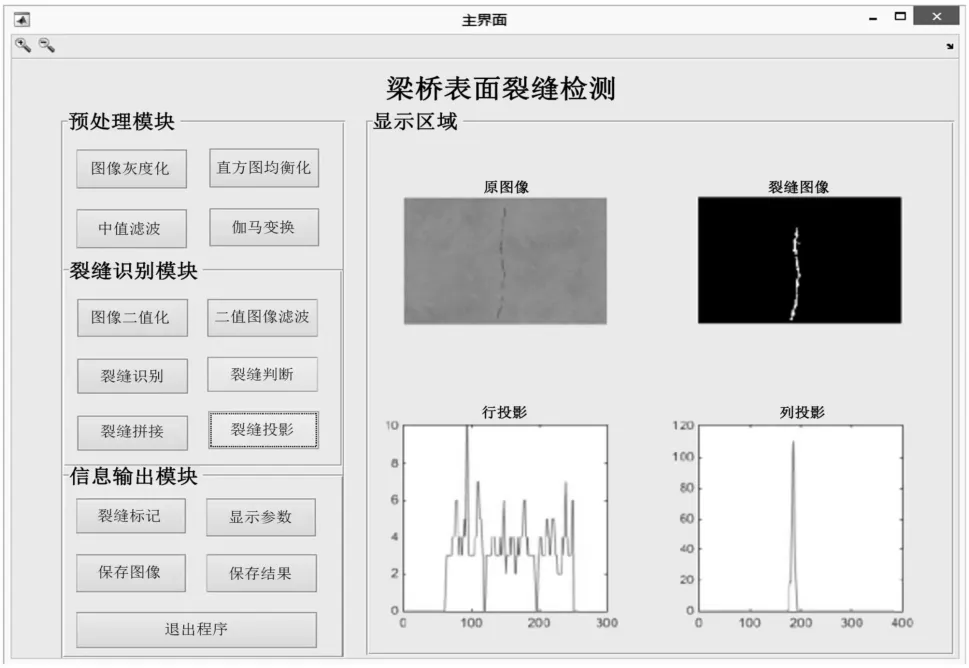
图11 裂缝投影
裂缝标记和参数显示:根据前面投影,对裂缝进行定位并标记,然后分别获取裂缝的阈值信息、面积信息、长度信息、最大和最小宽度信息及方向,如图12和图13所示。
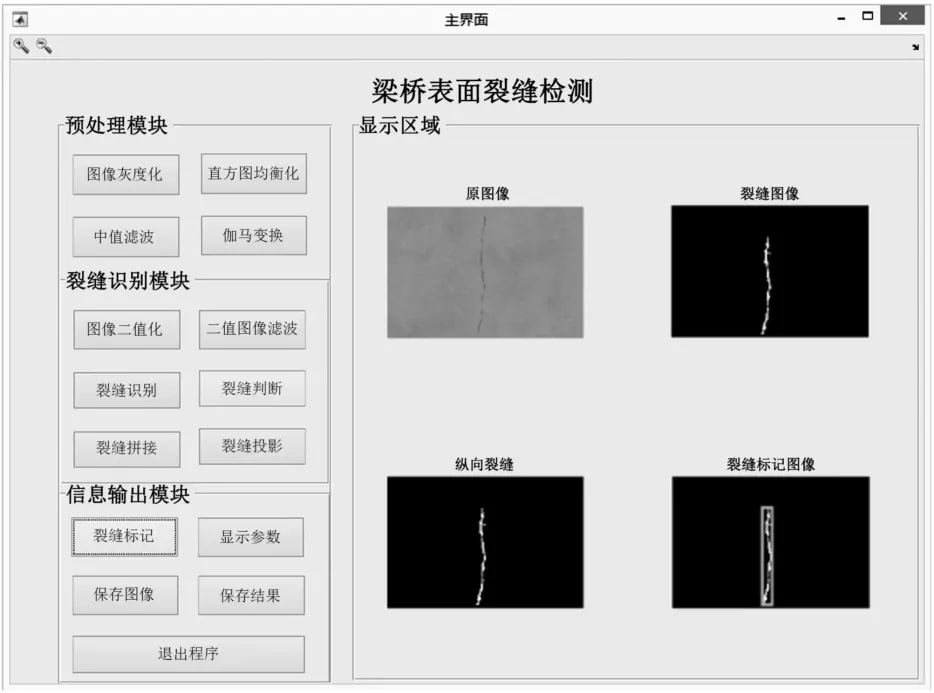
图12 裂缝影像标记
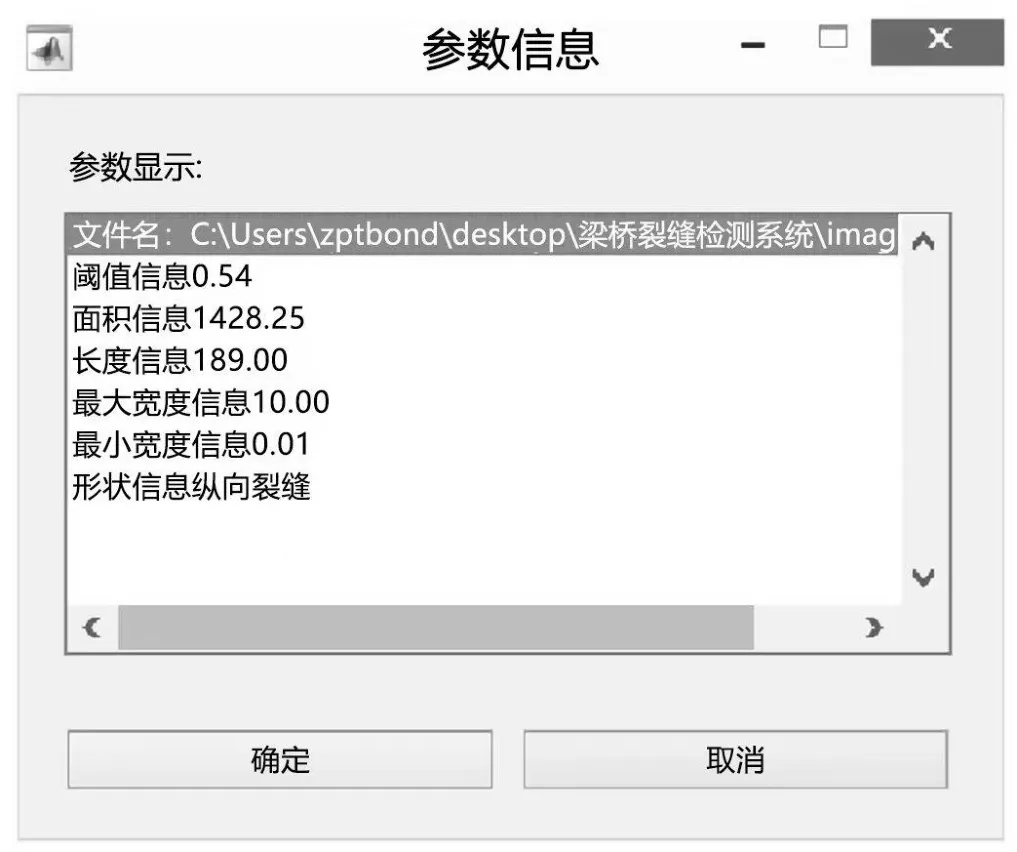
图13 显示参数信息
保存和保存结果:将识别好的裂缝影像存储并将裂缝的特征信息输出到Excel中保存。
本实例演示了本次开发的桥梁裂缝识别软件具体识别裂缝和提取裂缝特征的过程。首先实施一系列图像预处理来突出裂缝目标,然后通过二值化及其裂缝特征对裂缝进行识别和特征提取,提高了桥梁表面裂缝检测的自动化水平。其结果通过保存和数据入库的方式进行数据保存,具有一定的适用范围。
3 结论
本程序采用图像处理技术对桥梁表面无人机裂缝影像进行处理,然后对SDNET2018桥梁裂缝数据集的裂缝进行检测验证,结合梁桥裂缝识别程序判定出该桥梁现有的表面裂缝病害,对桥梁外观检测有一定创新和实际生产的意义。
无人机影像预处理还可以采用深度学习算法,这样可以提高处理无人机影像预处理的适应能力,使预处理后的无人机影像质量更好,更利于后续处理。裂缝的识别可以采用神经网络的方法,对已有裂缝进行训练,然后再去识别获取的裂缝影像,这样可以提高裂缝识别的准确率和效率。
