基于机器视觉的物料分拣装置设计与制作*
2023-02-02常修源
郭 鹤,常修源
(郑州科技学院,河南 郑州 450064)
机器视觉目前正被广泛运用于人们生产生活的各个领域,它使机器更加智能化,对自动化技术的发展也起到至关重要的推动作用[1]。目前,对于不同形状和颜色的产品分拣工作多通过人工进行,费时费力。为了改变这一现状,许多学者对自动分拣方法进行了研究。张亚婉等[2]设计了一种以ARM单片机为核心、利用OpenMV对物料进行分析与识别的物料分拣机器人,实现了对物料的智能化分拣;李橙等[3]利用激光视觉主动成像技术引导机器人完成分拣任务;邹子杰等[4]采用机器视觉对加油口进行特征识别,实现了对加油机器人的轨迹规划。目前的分拣机器人能够实现分拣工作自动化,但对于某些特殊场合,却无法实现非接触启动,针对这一问题,设计了一种基于机器视觉的物料分拣装置,能够对不同形状、颜色的物料进行自动化分拣,并可通过手势识别实现装置的非接触启动。
1 结构设计
本课题所需分拣的物料分为红、绿、蓝、黑4种颜色,形状分为等边三角形和正方形2种,其中等边三角形物料边长为30 mm,正方形物料边长为20 mm,所有物料厚度均为5 mm,物料材料为亚克力。根据物料规格,设计了分拣装置结构。
设计的分拣装置结构主要由摄像头、工作台、抓取机构、十字滑台机构组成。装置整体结构示意图如图1所示。物料分拣工作在分拣装置的工作台上进行,同时工作台还作为整个装置的底座,十字滑台机构和摄像头均被固定在工作台上。
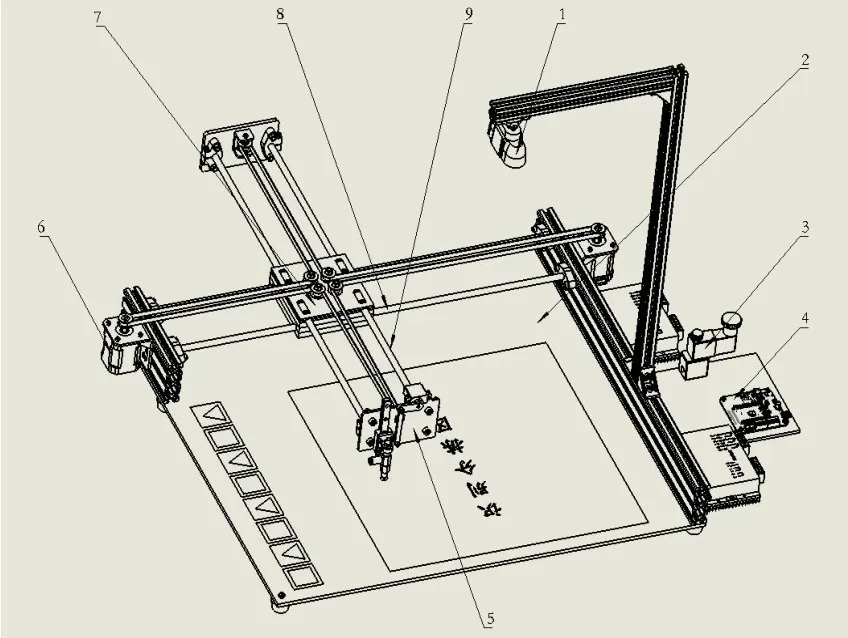
图1 物料分拣装置结构示意图
十字滑台机构由滑块、步进电机、光杠、同步带及带轮组成。物料抓取机构安装在十字滑块机构的末端。十字滑块机构采用CoreXY结构,两步进电机被固定在工作台上,滑块以固定在型材上的2根横向光杠为导轨,可相对于工作台进行横向运动,抓取机构安装在2根穿过滑块的纵向光杠上,光杠与滑块之间采用直线轴承连接,使纵向光杠可相对于滑块做纵向运动。抓取机构相对工作台的运动由步进电机驱动同步带传动提供,当两步进电机转速相同转向相反时,抓取机构相对于工作台进行纵向移动,当两步进电机转速相同且转向相同时,抓取机构相对于工作台进行横向移动。通过控制两步进电机的转速转向和转角就能控制抓取机构的位置和移动速度。
抓取机构由竖向导轨、滑块、吸盘、舵机及连杆组成,其结构如图2所示。竖向导轨和舵机被固定在面板上,滑块被安装在导轨上,可相对于导轨进行竖向运动,舵机通过连杆与滑块相连,而吸盘则被固定在滑块上,舵机的旋转运动通过连杆-滑块机构转化为吸盘的竖向运动。通过控制舵机的转向与转角即可控制吸盘在竖向上的抓取和放置动作。
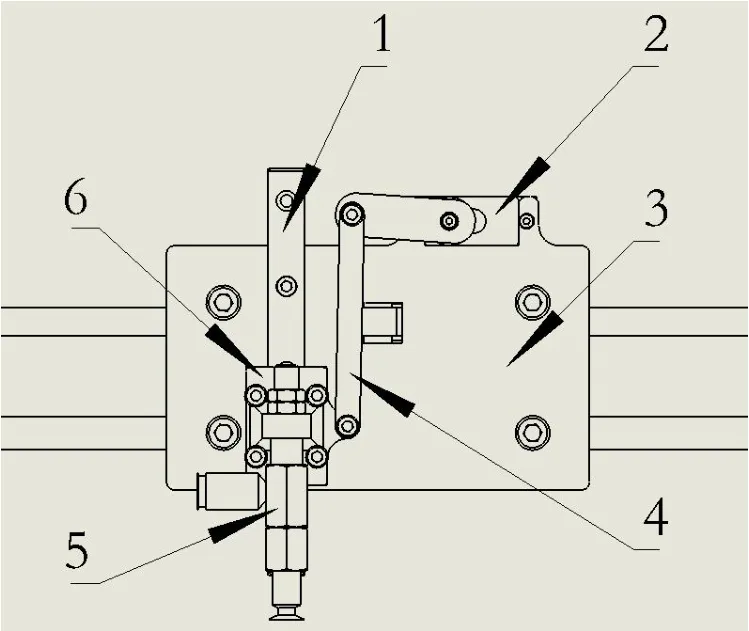
图2 抓取机构结构示意图
2 控制系统设计
2.1 控制系统原理
设计的分拣装置控制系统由摄像头、机器视觉系统、上位机、ARM单片机和气动系统组成。系统原理如图3所示。
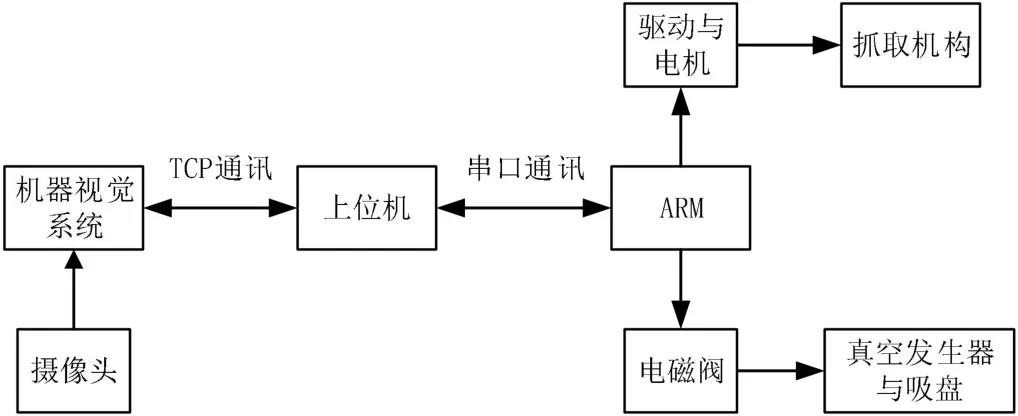
图3 系统原理框图
摄像头采集物料及手势图像,并传送到机器视觉系统,通过视觉算法识别图像内容,通过TCP通信协议将图像信息传送至上位机,上位机通过人机交互界面显示物料信息,并将分拣信号通过串口通信协议传送至ARM单片机,最终由单片机控制抓取机构和吸盘动作实现物料的抓取和放置[5]。
2.2 机器视觉系统
视觉系统采用蓝天科技LT-USB1080P摄像头采集图像,其参数如表1所示。机器视觉系统算法由手势识别、形状识别与颜色识别3部分组成。
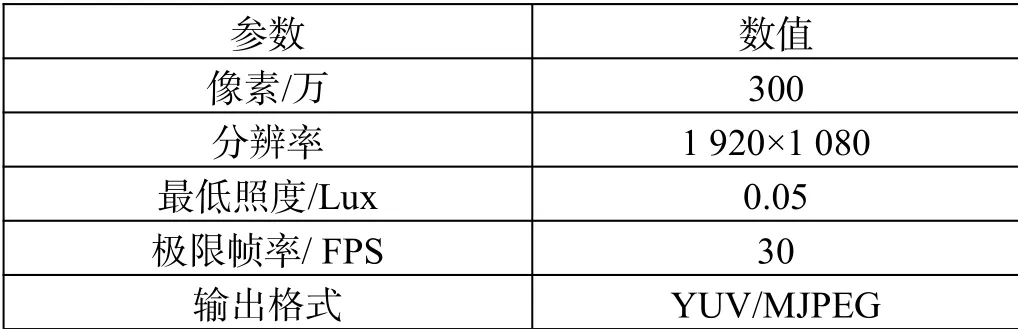
表1 摄像头参数
2.2.1 手势识别
考虑到在某些特定场合中分拣装置需要采用非接触方式启动,为确保操作人员安全避免误启动,本设计添加了手势识别功能以控制分拣装置非接触启动。
设计采用谷歌MediaPipe框架进行手势识别,该算法利用机器学习可推算出手部21个关键点信息,通过判断这21个关键点位姿计算出手势,当手部被部分遮挡时,该算法仍能推算出手势信息,具有较好的鲁棒性[6-7]。手势识别效果图如图4所示。
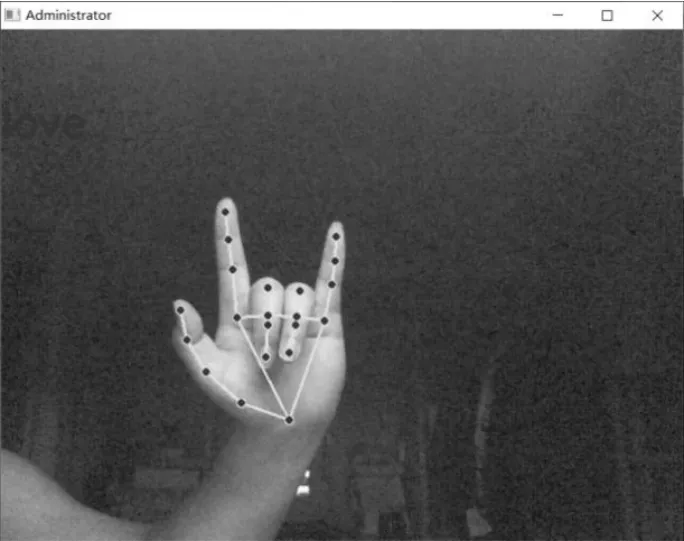
图4 手势识别效果图
2.2.2 形状与颜色识别
设计的分拣装置视觉系统首先对物料形状进行识别,再进行颜色识别,最终得出物料规格信息。在进行形状识别时,采用Canny算子进行物料边缘检测[8],首先将图像转化为灰度图,采用高斯滤波算法消除图像中的干扰,利用Sobel算子计算像素点的梯度幅值和方向,采用非极大值抑制得到二值图像,其中非边缘点灰度为0,而可能为边缘的点的灰度值为255,最后利用双阈值筛选出最接近边缘的点并得到最终边缘图像。在得到的边缘图像中进行轮廓查找,将得到的轮廓信息进行多变形拟合,通过判断拟合后图像的交点确定物料的形状。
设计的视觉系统以图像的HSV模型为基础对物料进行颜色识别。首先将拍摄RGB模型图像转化为HSV模型,设K1=max(r,g,b),K2=min(r,g,b),转换公式如下:
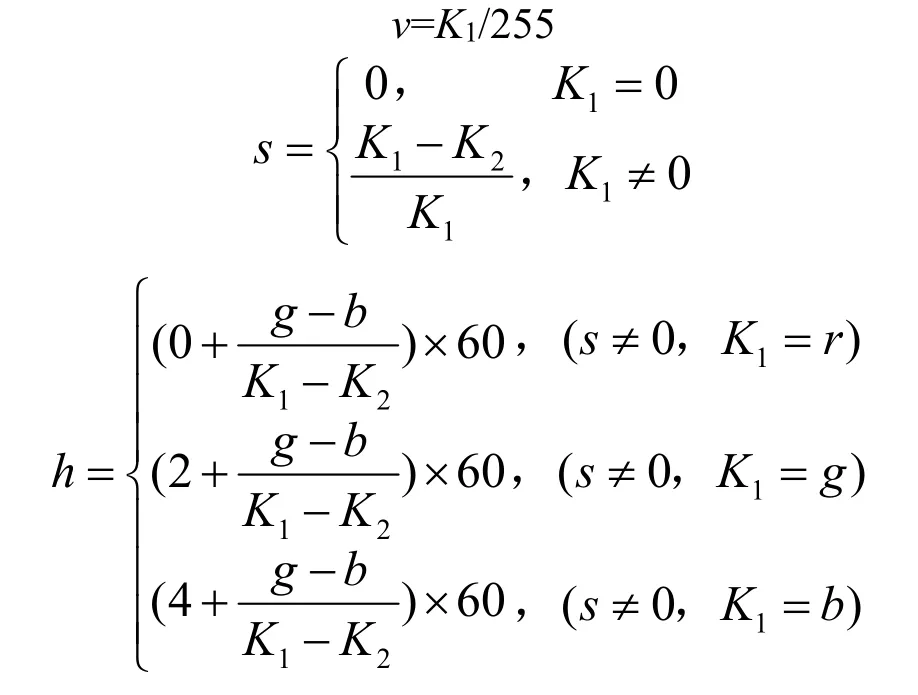
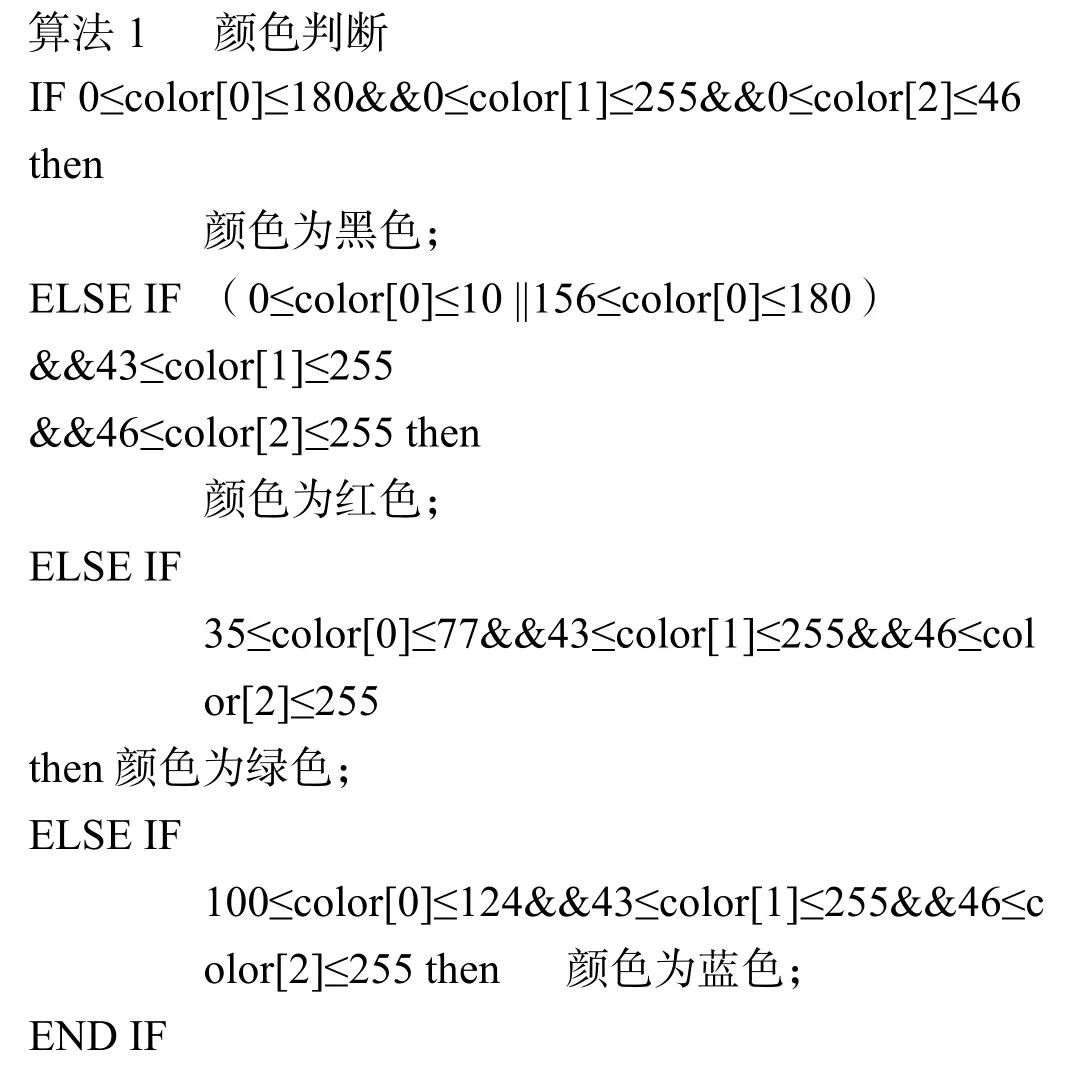
通过判断每个形状中心点的HSV值,判断该物料颜色,设中心点的H值为color[0],S值为color[1],V值为color[2],则算法如下:
2.3 上位机人机交互界面设计
采用Visual Studio 2013软件搭建分拣装置人机交互界面。通过人机交互界面可设置上位机与ARM单片机的串口通讯参数,并可实时显示识别的物料规格和数量。设计的人机交互界面如图5所示。

图5 人机交互界面
2.4 单片机控制系统设计
设计的物料分拣装置的单片机控制系统以STM32F103C8T6单片机为核心,通过串口协议与上位机进行通讯,并通过Ⅰ/O口实现对步进电机、舵机及电磁阀的控制。设计的控制系统电路由CPU模块、Type_C接口模块、稳压电源模块、接口模块、限位传感器模块等组成。PCB板仿真图如图6所示。
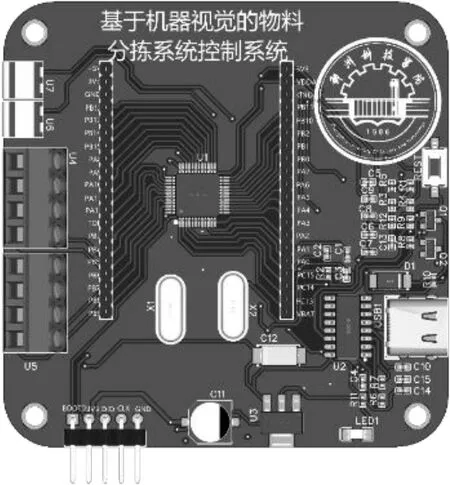
图6 PCB板仿真图
3 样机制作与实验
购买的主要零部件型号如表2所示。非标准件如支架、滑块、抓取机构连杆等,采用郑州科技学院机械工程创新实验室3D打印机进行增材制作,材料为PLA。抓取机构面板、电路板安装板等采用机械工程创新实验室激光切割机进行制造,材料为亚克力。
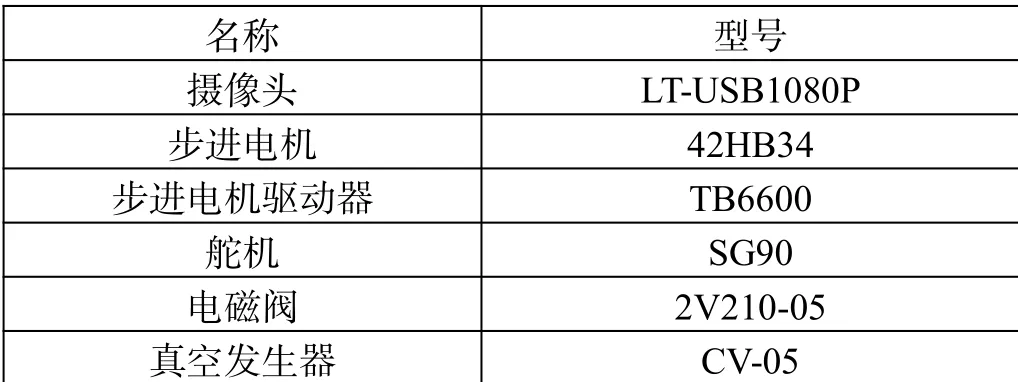
表2 主要零部件型号
制作的物料分拣装置及上位机如图7所示。用制作的装置进行分拣实验,分拣物料规格及数量如表3所示。对所有物料进行20次分拣实验,记录每次分拣准确率和总用时。计算出平均分拣准确率为100%,平均分拣时间为78 s。
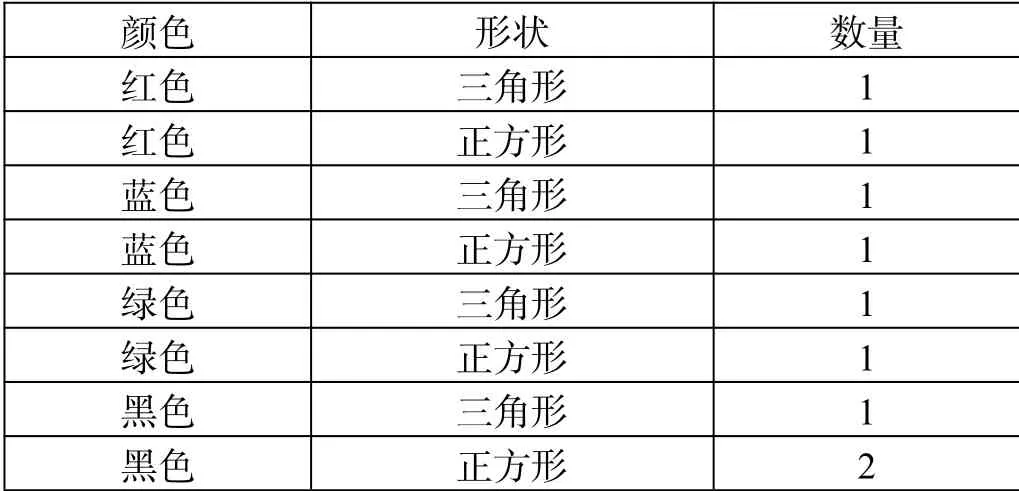
表3 物料规格及数量
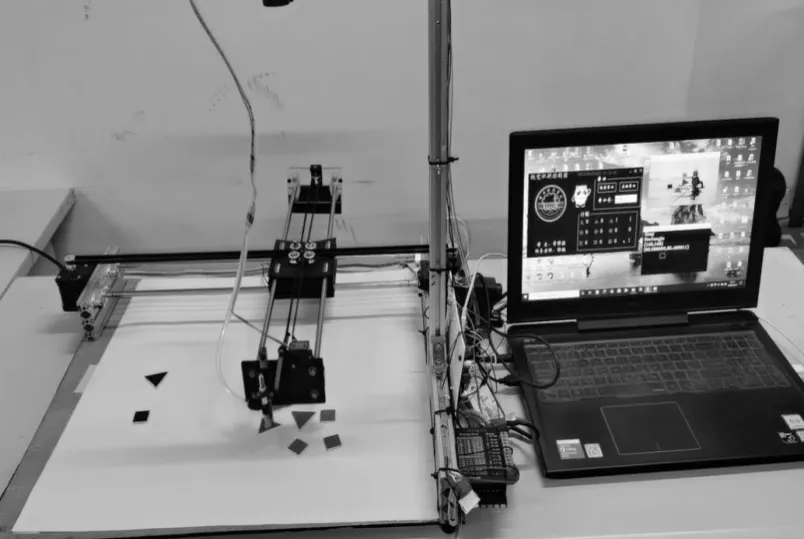
图7 物料分拣装置及上位机
4 结论
根据物料分拣要求,设计并制作了基于机器视觉的物料分拣装置,采用CoreXY机构和连杆-滑块机构实现抓取机构的三自由度驱动,装置控制系统由视觉系统、上位机、单片机控制系统和执行机构组成,可通过手势识别进行非接触启动控制,实验证明,设计的分拣装置平均分拣准确率和分拣速度达到了预期效果。
