基于“互联网+”的智能机器人教学平台设计研究
2023-02-02朱通
朱通
(天津工业职业学院,天津 300400)
互联网技术的出现和应用,给课程教学带来了很多的新工具、新方法,进一步丰富了教学内容,如何更好地运用互联网等技术提升教学成效,成为当前相关专业教师面临的重要课题[1-2]。在智能课程教学方面目前依然存在以下两点不足:①学生创新思维不足。目前对智能课程的教学而言,大多采用教师演示的方式完成相关的实验,学生们缺乏将所想变为现实的自主性,导致教师很难激发学生的创新性思维和自主性学习。②学习平台有限。随着科技的发展,需要将越来越新的知识补充到课程教学过程中。目前由于采用的实验设备不足以满足当今快速发展的需求,因此在教学过程中加入新的技能知识尤为重要。综上,可以看出加强新时期“互联网+”背景下智能机器课程研究具有重要的现实意义[3-4]。
“互联网+”背景下,智能机器人课程开发设计需要结合实际,以学生为中心,从课程设计、教学开展与评价等方面不断创新,这样才能更好地提升教学有效性,更好地激发学生学习兴趣,在潜移默化中锻炼学生思维与技能,提升学生综合素养,使学生更好地适应未来社会发展需求[5]。
本设计平台通过采用当今人工智能教育的方式为各个阶段对智能机器人感兴趣的学生提供学习平台,为教师们提供教学演示平台,符合当今“互联网+”的发展形势。本平台主要有教学演示模块、传感器认知模块、图形化编程模块、自主开发模块以及3D打印模块,为不同阶段学生提供个性化与差异化的自主学习平台。同时,采用互联方式,可以在各种设备上进行学习,满足各个层次的学生需求。
1 教学平台设计研究
智能机器人教学平台是基于“互联网+”的智能教学平台,通过互联网计算机系统提供即时、有效、全面且针对性的学习、诊断。涵盖优质教学资源,用户可进行智能机器人相关工作原理讲解、图形化编程控制机器人运动、与教师进行在线交流答疑、用户集体讨论共享资源等操作。在互联网信息通讯高度发达的现代社会,智能机器人教学平台包括海量机器人示例、视频辅导、针对性教学等特色功能,是更精准、更即时、更有效地进行学习的智能教学系统,能为对智能机器人有浓厚兴趣的爱好者提供一个自主学习的平台,是提高教学效率、学习效率的主流方式。在人工智能技术发展的今天,为广大的用户提供了一个学习智能机器人的方法。
1.1 实现功能
智能机器人教学平台是一个集环境感知与通信、动态决策与规划、行为控制与执行、人机交互及教学演示等多功能于一体的综合教学演示系统。它集中了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程等多学科的研究成果。下面对其实现的部分功能进行简要阐述[6-7]。
1.1.1 环境感知与通信
智能机器人能够通过搭载超声波模块、OpenMv模块、红外光电对管、温湿度感知模块、Wi-Fi模块、蓝牙模块、GPRS数据传输单元等传感器对周围环境进行识别,智能机器人主控制器可以对识别信息进行处理得到相应的环境信息以完成感知功能;利用Wi-Fi模块与GPRS数据传输单元智能机器人可以将环境信息传递到数据存储服务器,并通过监控装置实时展示;利用蓝牙模块智能机器人可以与手机等移动设备相连,通过移动客户端对智能机器人进行管理与控制[8-9]。
1.1.2 动态决策与规划
智能机器人主控制器能够对获取到的各类信息如传感器检测信息、智能机器人运行状态等信息进行合理分类,并对不同类别的信息作出实时反应。如避障循迹模式下智能机器人主控制器能够及时处理传感器检测到的路面信息,识别出前进道路上的障碍并下达避让指令,识别出地上的轨迹并下达循迹指令。教学演示模式下智能机器人主控制器能够定时下达自检指令以获取运行状态,并实时判断是否出现故障,定时下达数据传输指令回传机器人状态信息;同时可以接收监控设备或移动客户端发出的实时编程控制指令,并下达相应功能指令以完成教学展示功能。
1.1.3 行为控制与执行
智能机器人搭载的主控制器可以根据设定程序在不同工作环境及模式下对被控器件下达指令。接收信息的被控器件如超声波模块、OpenMv模块等传感器实现环境感知功能,负责智能机器人行动的电机以及控制传感器方向位置的舵机实现智能机器人的行为运动功能。
1.2 平台设计思路
本平台主要包含教学示范模块、理论知识学习模块、实践操作指导模块、在线答疑模块、集体讨论专区、文件服务模块、传感器认知模块、图形化编程模块、自主开发模块以及3D打印模块,以满足不同用户的需求。
教学示范:通过教学视频以及远程交互的方式实现用户之间的交流、沟通与学习。本模块中有提前录制好的教学视频,包括理论知识教学和实践操作指导2个部分。
理论知识模块:智能机器人的基本概念、定义与特性、组成和工作原理、关键技术、机械结构系统、驱动机构与运动机构、控制系统、感觉系统、通信系统、导航系统、多传感器信息融合技术、智能机器人的相关示例等章节。每一章具有相关习题,方便学生巩固知识,加深理解。
实践操作指导模块:智能机器人机构的组装与调试、感知系统的组装与调试、控制系统的组装与调试、运动系统的组装与调试以及软件中图形化编程的教学。
在线答疑模块:为了提高教学质量,学生还可以通过文字、声音等形式与教师进行在线的沟通与交流。
集体讨论专区:平台中有一单独的讨论模块,用户参与讨论,通过文字、图画、声音等方式进行沟通与交流,管理员为最高权限人,可以对用户的发言进行控制。
文件服务模块:学生可以查看、上传或下载平台上教师分享的文件,也可以在讨论区共享文件。
传感器认知模块:该模块通过对智能机器人所用传感器的介绍,包括对位置角度传感器、速度和角速度传感器、加速度和角加速度传感器、姿态角的检测传感器、触觉与接近传感器、测距传感器、听觉传感器、视觉传感器、导航相关传感器等传感器的认识和使用教程,让用户更加清晰地认识各个模块,该模块还可以对每个传感器进行选型等操作。
图形化编程模块:用户从封装好的编程语句库中选择自己需要的语句,拖到编程主界面中,设计一种“卡扣”结构,使语句每一条语句可以连接起来,保证程序实现顺序执行,该模块符合当今“互联网+”的发展趋势,降低了编程的难度,让每位用户能够自主进行简单编程操作,可满足各个阶段用户的需求。
自主开发模块:针对自己创新想法,可通过该模块进行编程设计,满足自身的特殊需求,从而激发每位用户的兴趣,提升智能化水平。
3D打印模块:用户可以自行打印模型,供硬件所用,通过界面提交远程操控3D打印机进行打印。
2 实例验证
本文以基于OpenMv的小球识别实验为例,对智能机器人教学平台进行相关研究。
2.1 项目任务
本实验主要完成小车上电之后,小球信息通过OpenMv模块传给Arduino主控板,控制小车进行前进、后退、左转、右转等动作,使小车靠近小球,距离小球10 cm时小车停止运动。
2.2 项目准备
在该实验前需要对涉及到的相关传感器、整个机器人控制系统理论知识进行深入掌握。该平台在实验前采用思维导图形式,对所涉及知识内容进行列举,学生可以点击相关模块进行实验前的学习。
实验用具:已搭建好的小车1辆(可采用设计软件自行进行小车车体的设计,通过3D打印完成机体的设计)、Arduino主控板1个、拓展板1个、OpenMv模块1个以及导线若干。OpenMv模块如图1所示。
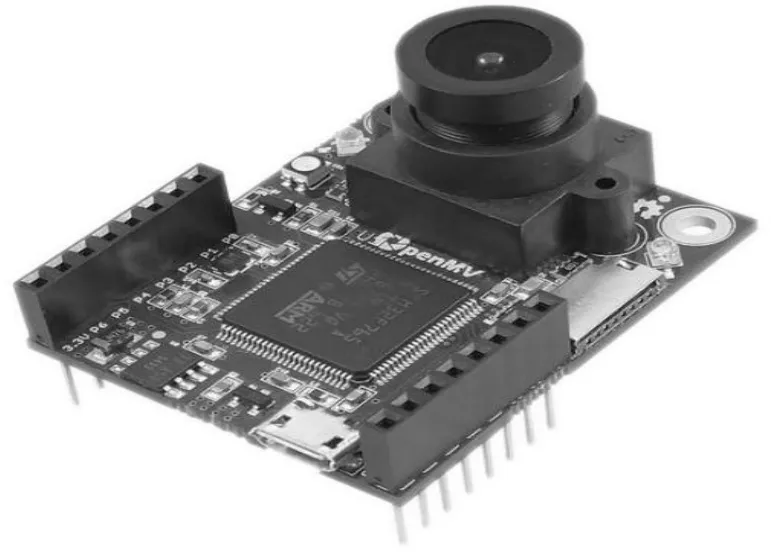
图1 OpenMv模块
2.3 项目原理讨论
采用团队讨论与动画讲解等形式完成该项目原理的讨论。原理如下:小球颜色信息可在LAB颜色空间中表示,经OpenMv模块处理后,可以将小球颜色信息转变为电压信息,作为Arduino主控板的输入信息。当小球在小车正前方时,小车前进;当小球在小车左侧时,小车左转;当小球在小车右侧时,小车右转,这样就可以使小球始终在小车视野正前方,进而逐步靠近小球,如图2所示。
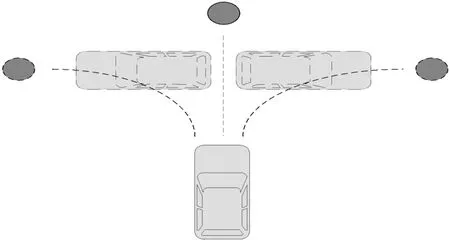
图2 小车运动模式
2.4 实验步骤
2.4.1 硬件组装
将OpenMv模块与Arduino主控板的接线进行再次检查:OpenMv模块的P6引脚接到拓展板的A0引脚,OpenMv模块的GND接到拓展板的GND引脚,OpenMv模块的Vcc接到拓展板的3.3 V引脚。
2.4.2 程序编写
对传感器、项目原理等相关知识学习完毕,可以采用图形化编程软件完成程序设计。打开Mixly软件,进入图形化编程主界面,可以自行进行相关程序设计。编程界面如图3所示。
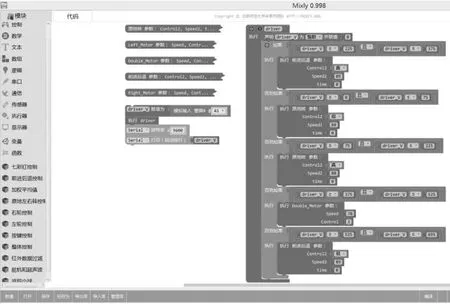
图3 编程界面
3 结语
基于“互联网+”的智能机器人教学平台可以有效帮助学生对智能机器人涉及知识进行巩固提升。动手式、项目式的教学模式更加能够激发学生的学习兴趣,让学生将思想变成现实,真正做到以学生为中心。该平台可以在教学、机器人竞赛训练等都有一定的应用价值,可以大大提升学生学习效率,为不同智能机器人掌握程度的学生提供学习平台。
