电液驱动水下发射筒开关盖装置高精度跟踪控制方法
2023-01-31吴友生
吴友生,程 栋,刘 东
(1.中国船舶集团有限公司第七一三研究所,河南 郑州 450015;2.河南省水下智能装备重点实验室,河南 郑州 450015)
引言
潜艇作为公认的战略性武器,是我国海军现阶段主要作战力量之一和保持水下能力优势的关键。得益于良好的隐蔽性、较长的续航和高机动性的特点,潜艇自第一次世界大战之后受到各国重视[1]。二次核反击是国家重要的防御手段,海基战略核力量作为重要组成之一,战略核潜艇凭借其独一无二的隐秘机动性成为核反击突击任务不可或缺的执行者。水下导弹发射筒开关盖装置在保证潜射导弹顺利发射中扮演着重要角色,但鉴于筒盖开关装置机械结构复杂、整体质量大、作业环境多变且恶劣,其安全稳定工作成为影响发射系统性能的关键。由于导弹发射窗口期短,且需等待发射井盖完全开启到位,因此导弹发射的成败极大取决于筒盖能否在设置时间内迅速且平稳打开[2];导弹发射完毕后,潜艇为躲避卫星侦察,筒盖能否及时关闭决定了潜艇的安全[3]。
水下导弹发射系统大部分采用液压驱动,液压缸控制筒盖进行开关动作,但处于潜航状态的潜艇易受水流扰动,筒盖工作环境具有负载不确定性、强干扰性以及运动非线性[4],加之开关过程中开盖角度大于90°时的超越负载现象,对开关盖动作的高精度控制提出挑战[5]。在发射筒开关盖运动控制的研究方面,有学者对筒盖动力学模型和调速阀电液系统进行深入研究,通过自适应滑模控制器提高发射筒开关盖的环境适应性,提高了位置跟踪精度[6-7];还有学者探讨筒盖传感器故障工况,设计PI观测器以实施估计筒盖系统传感器故障,极大改善了控制性能,提高了系统的容错性和可靠性[8]。以上研究主要基于调速阀控制的发射筒开关盖装置,并未对伺服阀在此领域的应用有所探讨。
相较于当前广泛采用的通过电磁换向阀和调速阀回油调速进行速度控制的方法,采用伺服阀直接控制不仅可以简化油路、提高系统可靠性[9],由伺服阀驱动的液压系统兼并响应快、精度高、平稳性好的特点[10],能更好的进行水下发射筒开关盖控制。
近年来,为补偿电液伺服系统的不确定性以提高系统控制精度,国内外大量学者致力于伺服阀的应用和电液伺服系统非线性控制的研究。郑文明等[11]分析伺服阀零位性能,说明了伺服阀性能下降的主要原因,并提出伺服阀科学使用方法。随着BP神经网络方法的提出,电液伺服系统模型的位置辨识可以更加精准[12]。为抑制非线性系统的抖振,有研究团队使用滑模自适应控制方法,最终实现了在电液伺服系统低速运转时的稳定和精确跟踪[13]。学者们还发现了对电液系统的位置反馈进行补偿的有效方法,即通过干扰观测器,消除模型不匹配性,极大提高了位置控制精度[14]。
本研究针对发射筒盖开启关闭过程中的不确定性干扰问题以及开合动作的速度精准控制问题,提出了一种采用高增益观测器的滑模控制器,抑制系统非线性对控制效果的影响,并且采用伺服阀替换传统换向阀和节流阀回油调速控制,以提高水下发射筒开关盖装置控制的动作平稳性和时间精准性。
1 开关盖装置机械结构
发射筒开关盖装置机械结构主要包含发射筒及筒盖、开关盖液压缸、转轴和传动装置等,开关盖执行机构如图1所示。

图1 发射筒开关盖执行机构结构图Fig.1 Actuator structure of launching shaft switch cover
调速阀控开关盖装置液压原理图如图2所示,液压缸动作时,通过电磁换向阀控制活塞杆运动方向,通过调速阀进行回油调速控制开关盖运动速度。
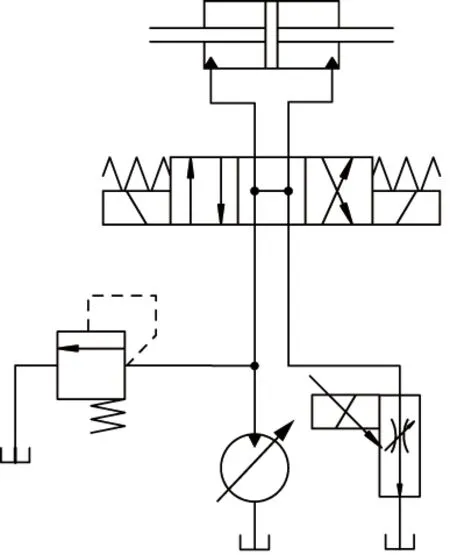
图2 开关盖液压缸回油调速回路原理图Fig.2 Circuit diagram of speed regulator valve
伺服阀控开关盖装置液压原理图如图3所示,采用高精度电液伺服阀对液压缸的运动进行控制,实现液压缸的速度和位置闭环控制。电液伺服阀具有线性度好、响应速度快、运动平稳可靠等优点,更适应鲁棒自适应控制等非线性控制方法。
2 开关盖液压执行系统数学模型
2.1 调速阀控开关盖装置数学模型
调速阀控开关盖装置执行机构模型如图4所示,为简化方程,假定调速阀最小开口为0;系统采用恒压源供油,pS保持恒定;回油无背压即p0=0。

图3 伺服阀控开关盖液压缸回路原理图Fig.3 Circuit diagram of sevor valve

图4 调速阀执行机构模型Fig.4 Model of governing valve actuator
忽略液压油的可压缩性,建立调速阀流量连续性方程,当阀芯动作时,调速阀流量QL和阀芯位移xv的关系可表示为:
(1)
式中,Cd—— 调速阀流量系数
ω—— 调速阀阀芯周长
xv—— 节流阀芯位移
kR—— 调速阀减压弹簧刚度
xC—— 节流口开口为0时弹簧压缩量
ρ—— 液压油密度
AR—— 减压阀芯最大横截面积
2.2 伺服阀控开关盖装置数学模型
伺服阀控开关盖装置执行机构模型如图5所示,为简化方程,假定伺服阀最小开口为0,系统为恒压源且无背压。

图5 伺服阀执行机构模型Fig.5 Model of servo valve actuator
建立电液伺服阀流量连续性方程,当阀芯动作时,液压缸左右腔流量Q1,Q2和阀芯位移xv的关系可表示为:
(2)
(3)
式中,Cd—— 伺服阀流量系数
w—— 伺服阀阀口面积梯度
xv—— 伺服阀阀芯位移
ρ—— 液压油密度
p1,p2—— 进油腔和回油腔的压力
(4)

(5)
2.3 开关盖液压缸数学模型
为提高控制性能,开关盖装置采用双出杆液压缸为执行件,液压缸左右腔中的油液流量方程可表示为:
(6)
式中,Ap—— 开关盖液压缸有效工作面积
xp—— 开关盖液压缸位移
Cip—— 缸体内泄漏系数
Cep—— 缸体外泄漏系数
βe—— 液压油有效体积弹性模量
V1,V2—— 开关盖液压缸A,B腔容积
设负载压降为pL=p1-p2,则液压缸流量连续方程可写为:
(7)

建立开关盖液压缸受力平衡方程,为简化方程,将液压缸缸体与活塞间的摩擦系数视为0且忽略液压油质量。结合惯性定律,液压缸力平衡方程可表示为:
(8)
式中,m—— 开关盖液压缸活塞杆及其连接件总重量
Bp—— 液压缸黏性阻尼系数
FG—— 发射筒盖及其附加结构重力
FN—— 外界干扰作用于发射筒该上的力
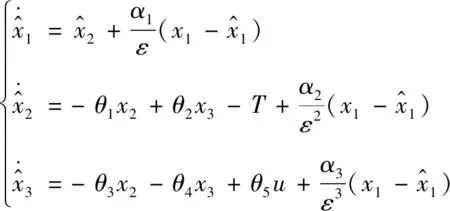
选取系统状态量矩阵为:

(9)
其中:θ1=Bp/m,θ2=Ap/m,T=(FG+FN)/m,θ3=4βeAp/Vt,θ4=4βeCtp,θ5=4βe/V,u=QL。
3 控制系统设计
如图6所示是控制系统的设计方案,由开关盖动作控制器生成控制曲线,利用高增益观测器减小非线性模型误差提高系统鲁棒性,从而抑制开关盖动作过程的扰动和抖振,以提高液压缸位置和速度的跟踪精度。
3.1 高增益观测器设计

(10)
其中,α1和α2为正实数,ε≪1。

图6 系统控制方案Fig.6 Structure of control system

(11)

(12)


3.2 滑模控制器设计
针对模型式(9),设计滑模函数为:
(13)
其中,c1>0,c2>0,e=x1-xd。
令:
β2=c2θ2-θ1θ2-θ2θ4
β3=c2-θ1
取控制率为:
β1β4x2+c1β2x1x3+β2β3x2x3-β2β4x3-
[θ2θ5(β4-c1x2+β2x2+θ2x3)]
(14)
由于:
(15)

由Lyapunov稳定性判据可得,设计的滑模控制器渐近稳定。
4 试验验证
4.1 试验台
开关盖模拟水下试验装置如图7所示,主要由开关盖液压缸、导弹发射筒及其筒盖、水下潜射环境模拟装置、液压泵站和控制系统组成。液压泵站充当试验系统的动力源;开关盖液压缸为整个试验装置主要动作装置,安装于发射井筒壁,另一端与筒盖开关机构相连,实现筒盖的开启与关闭动作;水下环境模拟装置通过注水、排水模拟发射筒水下启闭环境及水流扰动。为对比调速阀阀与伺服阀对开关盖控制效果的影响,液压系统设计2条支路,分别为由电磁换向阀、调速阀组成的回油调速回路和由电液伺服阀单独控制的伺服控制回路。

图7 开关盖模拟水下试验装置Fig.7 Underwater simulating test device of launching shaft switch cover

图8 开关盖试验装置控制系统结构图Fig.8 Control system of test device
开关盖试验装置控制系统架构如图8所示。基于设定的开关盖时间解算开关盖位置控制参考信号,通过控制器解算液压阀控制信号控制开关盖液压缸动作,使用高增益观测器结合位移传感器、压力传感器对系统状态量进行观测后引入控制器,实现闭环控制。解算得出的阀驱动信号经工控机数模转换后发送±10 V电压信号,经信号调理转接系统进行电压电流转换后输出±40 mA信号驱动调速阀/伺服阀,实现对开关盖装置的动作控制。
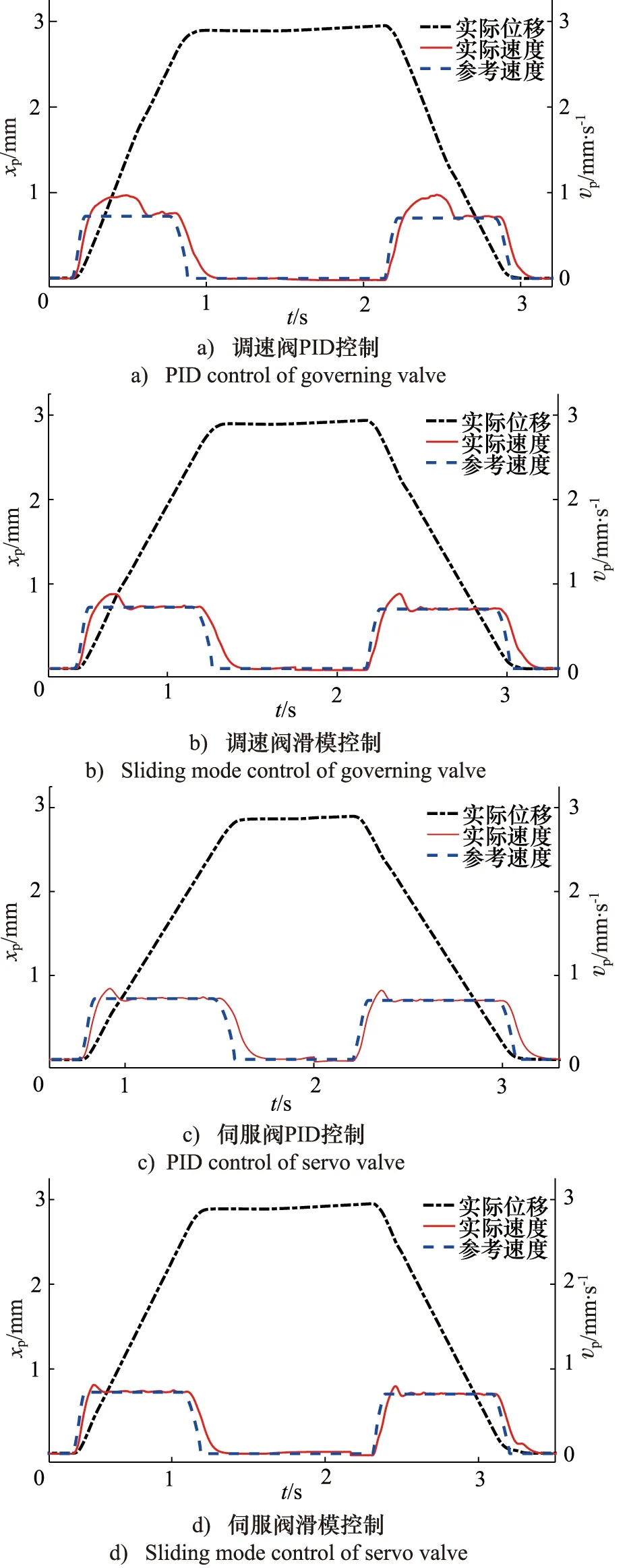
图9 开关盖控制实验轨迹Fig.9 Track of switch cover controls experiment
4.2 试验结果
为比较调速阀和伺服阀的控制效果,验证提出的高增益滑模控制器对控制效果的提升,分别对调速阀和伺服阀采用传统PID控制和高增益滑模控制进行开关盖试验。试验得到开关盖液压缸活塞杆位移xp和筒盖开关速度vp,如图9所示。由图可知,虽然位移曲线相接近,但在速度跟踪精度和平稳度上,伺服阀的控制效果明显优于调速阀回油调速控制,采用高增益滑模控制的控制效果优于传统PID控制,并且采用伺服阀和高增益滑模控制的组合对控制效果提升最明显。
开盖速度误差e如图10、表1所示。采用伺服阀滑模控制的速度跟踪效果最优,均方根误差最小,控制精度较传统控制上升30%。

图10 开关盖速度误差Fig.10 Speed deviation of switch cover controls experiment

表1 开盖速度误差Tab.1 Speed deviation of switch cover controls experiment
5 结论
针对水下发射装置开关盖的速度高精度控制问题,提出了使用伺服阀替代调速阀的改进控制方案,设计了一种基于高增益观测器的滑模控制器,并根据搭建的筒盖模拟装置进行试验验证。试验结果表明,改进后的控制方案能有效提高筒盖开关盖的速度控制精度,较传统方法提升30%,实现了筒盖系统的平稳高效控制。
