智能网联车路口行驶的决策策略分析
2023-01-31王健民
王健民,施 卫,张 宇
(江苏理工学院 机械工程学院,江苏 常州 213001)
人们为了出行方便,使用汽车的比例在逐年增加,所以交通事故和交通拥堵成为了用户出行困扰。尤其城市的交通路口是驾驶员行驶问题发生的重灾区。目前解决交通路口的行驶方案,主要是在交通路口设置交通信号灯和行车智能助手语音播报,虽然有效减少了交通事故的发生,但依然无法解决拥堵情况和驾驶员大量时间浪费。本文以复杂的交通路口作为研究背景,介绍智能网联车在不同交通情况下执行合理、安全性的行驶策略。
本文对智能网联车路口行驶决策展开研究,外部环境的变化直接影响着驾驶行为决策结果的正确性。本文选取一类人驾驶经验样本数据集和车辆驾驶行为样本数据集分别作为条件属性和决策属性,以电动汽车作为研究载体,通过相机、雷达、全球定位系统(Global Positioning System,GPS)等车载传感器,获取“人-车-路”的行驶周围环境信息,来大大提高行驶决策的实时性和准确性[1-2]。实现在各种复杂行驶工况下智能网联车的行驶安全,为智能网联车在不同行驶环境下提供了多种相对应的行驶策略系统。
1 智能网联车
随着人工智能化的不断进步,汽车产业也不断向智能化、网联化的方向发展,无人驾驶的理念也在完善。我国用户对于智能网联汽车的使用也增多,并且政府也大力支持智能网联车的研发,智能网联车在未来有巨大的发展潜力。
新时代智能化的发展让无人驾驶技术也越来越成熟,现阶段无人驾驶技术主要应用在智能网联汽车[3]。智能网联汽车的发展无疑是汽车产业的研发重点关注对象,其涉及众多学科技术以促进智能网联汽车的两个关键技术:智能化和网联化的发展[4],如图1所示。无人驾驶作为新型技术,国家为了人民更好的驾驶安全性和舒适性,在大数据互联网和智能化的背景下,大力支持自主车企业和学科研发人员,加大对智能网联汽车的发展投资力度。
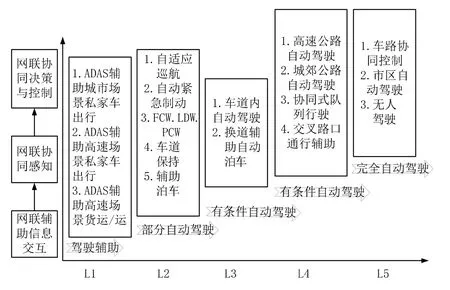
图1 智能网联的发展趋势路径
2 驶决策系统简介
2.1 设计要求
智能网联车的行驶决策系统以安全、合理性为行驶目标通过各种行驶环境。对于行驶决策设计要求主要分为以下几点:乘员舒适性(车辆转向稳定性、平顺性等);安全性和合理性要设定优先级顺序;可以人为选择的决策能力(满足驾驶员在行驶中想要的驾驶决策作为最高优先级);系统的实时性。对于无人驾驶车行驶在复杂的交通工况下的行为决策系统,设计准则还要规范在国家制定的交通法规下做出相应的行驶决策[5]。
2.2 输入与输出
智能网联车的无人驾驶分为感知、规划、执行三个部分,感知模块获取的信息作为行驶决策的输入,其包括以下信息:
(1)局部环境信息,通过相机、雷达等车载传感器,获得各传感器数据处理融合,实时、准确的获取车辆行驶的环境状态,整理出需要的环境信息输出给下层系统进行分析设计。
(2)自车定位信息,其基于高精度地图定位、GPS、实时的完善架构地图和定位车子信息[5]等方法,主要功能是对车辆进行高精度定位。
(3)全局环境信息,以初始地点到目标点的行驶路线包括全局路径、交通标志信息以及交通道路行驶过程中一切影响因素。
路径规划模块是解决智能网联车如何达到行驶目标的上层系统,主要分为两类规划形式:
(1)基于环境先验信息的全局规划,主要的研究方法有网格法、视图法等。
(2)基于传感器信息的局部规划,主要的研究方法有人工势场法、遗传算法、空间搜索法等。
上层感知得到的环境信息传输给决策模块后,得到决策规划的信息输入给执行模块进行操作,执行模块输出主要分为如下部分:
(1)转向系统,通过在方向盘的车轮间增加主动控制电机,实现对转向系统的主动控制。
(2)驱动系统,发动机控制油门踏板角度,根据角度变化对应节气门开度大小来实现驱动控制。
(3)制动系统,制动压力分配到制动轮缸实现对车产生稳定的制动力。
(4)车辆纵/横向控制,根据车辆行驶轨迹,实时调整车辆侧向运动,保证车辆跟随目标轨迹。
感知得到的信息传输给行驶决策系统处理,决策系统处理后得到的操作方式输入给运动规划模块执行,行为决策系统的功能主要包括预测算法、车行为规划与动作规划等。执行模块根据决策输出保证车辆的安全和合理的行驶。
2.3 系统分类
在无人车行为决策系统研究中可以概括为两大类:
一类是规则的行为决策,即对车辆行驶的所有情况进行汇集和区分,不断完善构建无人驾驶车的行为数据库,行为数据库影响因素包含交通法规、行驶规则、经验、知识等,根据这些信息作为判断条件在什么行驶环境下对应什么车辆状态,并按照设计准则的行驶行为去执行。其代表方法为有限状机法[6-7]。
另一类是学习算法的行为决策,将驾驶行为和对应驾驶场景作为样本不断进行自主学习,并且在原有基础上增添新数据,逐步完善行为规则库,由于不同的“人-车-路”的场景样本信息,所以要运用合理的学习方法来获得对应场景合理的决策行为,以深度学习的相关方法及决策树等各类机器学习方法为代表[8]。本文基于规则的行为决策方法对无人车行驶到路口的情况下,设计出合理、安全性的行驶方式。
2.4 系统架构
通过对上述的介绍,对智能网联车有一定的认识,整体系统架构分为感知模块系统、决策模块系统、执行系统,系统自上而下通过以太网对数据进行传输,保证数据的实时性和完整性。
环境感知模块通过相机、雷达等车载传感器;GPS、数据地图和车用无线通信技术(Vehicle to X,V2X)(车的通讯对象车对车;车对路、车对人以及车对基础设施)获取相关环境信息,对于交通场景的模型构建为下层模块导入信息。
行为决策模块通过上层感知模块的信息运用人工势场法获取全局最优行驶路线,得到明确的驾驶路线;再依据道路和交通法规等环境信息运用决策树(机器学习方法)算法决策出合理驾驶行为;并将决策信息输入给运动规划系统对车辆纵/横向运动控制。
控制执行系统接收决策系统具体规划信息,控制车辆达到想要的速度和行驶路径,并且根据V2X技术实时检测反馈给决策层进行准确修正,如图2所示。

图2 系统结构图
3 无人车行驶状态
驾驶行为决策是建立行驶的交通环境的关键,当无人车行驶在不同的交通场景下,所对应执行的驾驶行为也各不相同。当智能网联车行驶到十字路口下,在不同行驶路线下行驶状态也不相同。行驶环境可以分为乡村环境和城区环境,乡村环境分为路上驾驶场景和路口驾驶场景;城区环境分为路上驾驶场景、路口驾驶场景、预路U驾驶场景和区域驾驶场景[9](在这里我们主要讨论路上和路口下的行为决策),图3是路口驾驶示意图。

图3 路口驾驶示意图
如图 4所示,在无人车从路上行驶通过路口的过程中,行驶场景的状态转换条件如下:

图4 路口场景转换示意图
A1:车辆与下一个路口入口点的垂直距离大于50 m;
A2:车辆距离下一个路口入口点垂直距离大于0 m小于50 m;
A3:车辆距离路口停车线垂直距离小于0 m;
A4:车辆驶出路口方向,车辆距离路口停车线垂直距离大于3 m;
A5:下一行驶场景为U形转弯时,基于车辆运动方向,车辆与U形转弯入口点距离小于5 m;
A6:车辆驶出路口方向,车辆距离U形转弯出口点垂直距离大于3 m且车头航向与下一段道路方向夹角小于10°。
无人车行驶中要按照《中华人民共和国道路交通安全法》要求在交叉路口中正确行驶。具体行驶路口规则有:(1)有交通标志、标线控制的,让优先通行的一方先行;(2)没有交通标志、标线控制的,进入路口前停车瞭望,让右方道路的来车先行;(3)无停止线路口,机动车停在路口以外等路口交通规则可查阅相关资料等[10]。
智能网联车输出的行为决策包括选择哪个行驶路线,要不要调头,要不要变道,要不要停车等行为[11]。根据汽车在结构化道路上行驶的行为,将智能汽车可采取的行为分为,车道保持、左换道、右换道、交叉路口直行、交叉路口左转、交叉路口右转、调头。汽车将要驶往的路段或车道发生变换的行为,具有两个阶段分别为准备阶段和执行阶段。
根据以上行驶行为保证在行驶的过程中安全通过路口的驾驶行为。对于速度变化、防避撞、紧急制动等参数和行为作为配合行驶策略执行的车辆动作。
4 行为决策
4.1 换道决策规划
在无人车从路上行驶到路口,再到行驶出路口的这段行驶过程可以划分为 3个模块:简单换道、避障换道和弯道换道。将传感器获得信息参考用户意图输入到行驶决策中执行在当前环境下想要的换道行为[12],如图5所示。

图5 换道规划模块
在整个行驶的换道过程中,其换道决策的行驶流程图如图6所示。

图6 换道行驶流程
4.2 转弯决策规划
当无人车进入路口时,根据规划路线和红绿灯信号条件以及判断路口是否有突发情况来决定加速(减速)行驶通过路口还是在路口等待,如图7所示。

图7 转弯行驶流程
4.3 调头决策规划
当汽车通过传感器感知得到路口没有禁止调头或专门指出可以掉头,禁止左转的不能调头时,要设置合理的行为决策[13],如图8和表1所示。

图8 调头行驶流程

表1 调头工况状态
5 总结
本文以智能网联车为研究对象,针对车辆行驶在十字路口时的行驶决策策略研究,本文首先对智能网联车的发展和背景进行简单介绍,并且对智能网联车的无人驾驶三个模块感知、规划、执行分别详细说明便于对智能网联车整体系统架构的理解。最后对无人驾驶在路口直行、转弯、调头、换道、停车等驾驶行为进行讨论,通过对人-车-路的驾驶环境因素掌握,对该信息分析处理并设置相对应的驾驶模式,保证智能网联车在各种行驶状态下的安全、合理性行驶通过。
在未来智能化和网联化的飞速发展,结合各种技术使无人驾驶对复杂交通环境的感知更加准确,让无人驾驶在交通路口下的行驶更快速、合理、安全。