数据中心智慧感知巡检机器人研究与应用
2023-01-31杨韬
杨 韬
(中国移动通信集团安徽有限公司,安徽 合肥 230088)
0 引 言
近年来,数据中心产业规模高速增长,年均增速超过30%,数据中心的快速发展带来了运维人力的巨大需求。在新基建浪潮下,大型或超大型数据中心拔地而起,动辄数百个标准化机房、数万台标准机架,运维人力区域不平衡的问题越来越突出。此外,随着机器人技术的快速发展,工业自动化机器人和机房智能巡检机器人市场需求高速增长,各行各业对机器人的接受程度大幅提高[1]。基于人工智能(Artificial Intelligence,AI)智慧感知巡检机器人立体化巡视关键技术,利用机器视觉技术、自动跟随技术、远红外热像技术、同步定位与地图创建(Simultaneous Localization and Mapping,SLAM)激光雷达导航技术以及多传感融合技术等对核心机楼内的服务器主机、网络设备、配电设备、制冷设备、配电线路以及机房环境等外部运行状态进行全方位的强化安全监控。
1 设计方案
智慧感知巡检机器人设计方案主要分为3部分,分别是车载子系统、后台管理系统以及相关联动设施。车载子系统通过现场采集和分析,通过局域网与后台客户端系统进行数据、图像、视频等交互。车载子系统是自主开发的全自主运动底盘,可以搭配各种传感器和监控设备,接收任务指令后对相关区域进行可见光图像、红外热图、空气参数及声音的采集,运行于房间等区域[2]。后台客户端系统部署于各控制室,通过和车载系统的数据交互实现运维任务派发、视频存储、红外温度检测、机器人房间运维、人工对讲、空气质量检测、巡检日志查询以及遥控巡逻等功能。运管系统对机器人进行任务下发,获得机器人上报的数据、图像、视频等进行状态监控、远程遥控、报表分析、工单管理、隐患闭环处理、资产管理、预防性维护、消息推送以及业务流程管理等。相关联动设施包括加装机房门自动开关装置、微模块门自动开关装置、挡鼠板自动提升装置、设备智能接口物联网采集器模块以及物联网网关等,可以确保机器人畅行无阻,并采集更多的数据。
智慧感知巡检机器人的工作原理如图1所示,包括数据部分、算法部分以及输出结果。
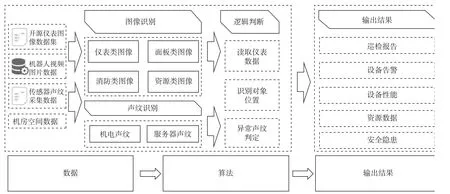
图1 智慧感知巡检机器人工作原理
数据部分除了各类传感器采集的数据外,还包含仪表类开源训练数据和机房空间基础数据。算法部分包含图像识别算法和声纹识别算法两大类,算法做出的初步逻辑判断会和设备告警、设备性能等指标进行关联,作为最后的结果输出。
2 系统组成设计
数据中心智慧感知巡检机器人主要包括一体化云台(包含高清和热成像摄像头)、SLAM激光雷达、智能避障传感器、光电传感器、工控机、环境监测探头、机器人核心主控板以及运动组件等一系列功能模块。
2.1 底盘设计
数据中心智慧感知巡检机器人底盘具备最大运行速度应不小于1 m/s,可原地旋转。1 m/s的运动速度下,最小制动距离应不大于0.4 m,爬坡能力应不小于5°,越障能力不小于5 mm,可正面通过0.6 m宽通道。车载子系统电源模块具有过压保护、过流保护、短路保护、过温保护以及防撞等功能,发生异常物体阻碍行进时能够自动驻车并上报异常告警。该底盘在狭小空间里具备较强的通过能力,结合SLAM激光雷达高精度定位导航的特点,能够实现特殊复杂环境下无死角巡检。
2.2 雷达定位传感器
SLAM激光雷达定位传感器用于机器人终端搭建数据中心机房现场虚拟化场景,激光安全等级为一级,自带过压保护,防护等级达到IP67。通过SLAM激光导航自动测绘生成高精度电子地图,并支持电子围栏、地图编辑等功能,机器人可以自主规划最优路线进行巡检[3]。
2.3 一体化云台
机器人车载系统搭载的一体化云台用于调节高清摄像头和红外热成像摄像头在日常运维过程中的三维空间角度坐标,同时还可以抬升高度。红外热像仪最大分辨率为384×288像素,测温范围为-20~150 ℃,支持实时点测温、多预置点测温、温度报警、温度实时分析以及历史温度查询等功能。高分辨率可见光摄像机具备1080P高清相机,可以自动变焦,工作温度在-10~50 ℃。
2.4 安全防护模块
数据中心智慧感知巡检机器人运动底盘搭载的安全防护模块具备远距离激光雷达防护,中距离超声雷达防护、短距离红外光电防护以及零距离触边防护4级防护体系,用于保障巡检机器人在巡逻过程中与周边环境保持相对安全的距离,以避免出现碰撞而报错。4级防护体系如图2所示。
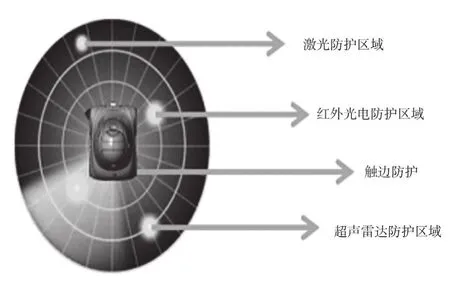
图2 4级防护体系
2.5 无线通信模块
机房现场机器人无线网络组网模式主要是基于有线局域网或者5G网络,在机房以及冷热通道内固定间隔距离增加无线接入点(Access Point,AP),实现无线网络的全覆盖并融入有线局域网。机器人可以在AP无线网络和主机间进行通信,还可以通过临时组建无线局域网和笔记本等移动设备进行通信,这样可以方便客户在现场操作机器人进行运维工作和临时任务执行。组建该临时无线网络的方法基本和通用的无线网络创建方法类似,在控制笔记本电脑上安装相应的机器人控制软件后即可和机器人联网进行操作。
2.6 自主充电装置
机器人在无任务进行时,均返回充电位置自动充电。同时机器人可以自动检测自身电量,当任务过程中发现自身电量不足10%时,将自动暂停任务,返回充电[4]。机房现场自主充电装置具有正负极触头和信号触头,当机器人本体成功充电后,充电指示灯将变成绿色,电源状态指示灯维持红色。特殊情况下还可以进行手动充电,使用手动充电器直接连接机器人的充电口进行充电。
2.7 后台管理系统
客户端布置在云平台上,机房巡检机器人终端设备采用5G或者Wi-Fi通信模块通过无线网络或者有线网络完成任务执行、结果上传以及状态反馈等功能,利用云平台对所有数据进行分析和存储。后台管理系统支持巡检记录、异常记录、固定格式报表导出以及数据保存,数据保留时间可以根据客户需求定制,视频数据默认保留90天。当硬盘存满时,可以自动从头覆盖,循环录像。客户端软件分为3大板块,分别是监控中心、配置中心和数据中心。监控中心包含实时监控、全景监控、任务模块、人脸识别以及人体识别;配置中心包含任务编辑部分、业务传感器配置部分;数据中心由数据报表、记录查询以及录像中心组成。后台实时监控界面如图3所示。

图3 后台管理系统监控画面
3 系统功能
3.1 智慧巡检
智能巡检机器人能够完成红外热成像视频拍摄、机房音频采集、机房温湿度数据测量等工作。智能巡检机器人引入AI算法,具备模式识别功能,能够进行精准的机柜U位识别、设备面板光学字符识别(Optical Character Recognition,ORC)、消防器材识别、人脸识别以及声纹识别等。此外,智能巡检机器人具有完善的数据管理后台,用于系统高效控制[5]。
(1)机械仪表识别。机器人的高清摄像头按照设定好的路径精准识别各类仪表,机器人折叠云台设计,更适应冷冻站空间较高、仪表位置较高的场景。
(2)空调面板识别。智慧运维机器人搭载的高清摄像头可以帮助机器人在机房巡检时轻松识别空调面板数据,及时反馈结果。
(3)红外热源监测。智慧运维机器人同时搭载了红外摄像头,可以轻松进行机房热源监测,并且可视化呈现机房温度情况。
(4)冷机声纹识别。冷机运行时会发出低频异响,人耳无法识别。而借助声纹识别模块采集设备运行声纹,通过自主设计的Python算法可以轻松识别异响,判断故障。
3.2 智慧支撑
智能巡检机器人搭载5G通信模块、运动组件、高清摄像头及语音通信模块,助力实现机房智能随工、客户服务支撑以及远程技术指导。
(1)机房智能随工。针对多机楼、多局址的运维场景,智慧运维机器人通过搭载的高清摄像头+AI算法完成图像合规性识别与回传,实现远程智能随工,有效掌握施工质量。
(2)客户服务支撑。基于5G网络大带宽的高性能,互联网数据中心(Internet Data Center,IDC)客户可以通过后台系统调用机器人完成对业务设备的远程巡查,高效开展资产盘点、故障勘察等工作。
(3)远程技术指导。故障处理方面,通过智慧巡检机器人搭载的4K高清摄像头及语音对讲模块,技术专家可以为现场维护人员提供有效的技术指导和处理方案。
3.3 智慧接待
(1)智能语言解说。数据中心内部署有参观解说二维码,通过机器人定点识别解说二维码,机器人可以替代解说人员进行参观讲解,帮助来园区参观的政企客户快速了解业务产品。
(2)智慧业务咨询。基于自研的自然语言分析算法,可以对部分基础业务情况通过问答形式进行咨询解说,辅助政企客户加深对IDC、云计算等业务的了解,助力政企业务发展[6]。
4 结 论
在数据中心运维领域引入智慧感知巡检机器人,是对传统IDC机房依靠人工手动抄表巡检模式的创新和改革。通过机器人巡检的应用,可以提高一线运维人员日常巡检及隐患处置的效率,同时也提高了数据中心、核心机楼等通信机房的运维处理能力,提升了客户托管业务和自有业务运行的安全性和稳定性。未来随着5G及人工智能的飞速发展,智能化感知巡检机器人将进一步推广到数据中心机房日常运维的各个环节,智能化运维将逐步取代现有的人工运维方式,真正意义上实现数据中心的无人值守,打造人工智能时代的新型数据中心。
