月球车地面遥操作技术发展现状与未来展望
2023-01-31李卫华郭军龙丁亮高海波
李卫华,郭军龙,丁亮,高海波
1.哈尔滨工业大学(威海) 汽车工程学院,威海 264201
2.哈尔滨工业大学 机电工程学院,哈尔滨 150001
由于月球在太阳系中的独特位置及其自身的环境特点,使其成为人类迈出地球摇篮、进入太空的第一站。通过月球探测,人类可以获取大量的资源,还可将其作为进入遥远空间的中转站,带来相关科学的发展和技术的创新[1]。因此,月球探测已成为各国重大航天工程的必然选择。
自1959年以来,美国、苏联、中国等国家相继开展了一系列月球探测活动[2-4]。美国“阿波罗”(Apollo)计划共发射了3辆载人月球漫游车(Lunar Roving Vehicle,LRV),它们由宇航员操纵行驶来开展月面探测任务。苏联月球车Lunokhod-1和Lunokhod-2也先后成功着陆,并对月球进行了无人化探测。
中国的“嫦娥”探月工程于2004年正式启动,已经成功实施了“绕”“落”“回”三步走[5-7]:2007年10月24日,“嫦娥一号”绕月探测卫星在西昌卫 星 发 射 中 心 成 功 发 射;2013年12月14日,“嫦娥三号”月球探测器成功在月球虹湾区着陆,使中国成为世界第3个实现月球软着陆的国家;2019年1月3日,“玉兔二号”月球车成功与“嫦娥四号”着陆器分离,首次实现月球背面着陆;2020年12月17日,“嫦娥五号”返回器安全着陆,成功完成中国首次地外天体采样返回任务,使中国成为世界上第2个月球无人自主采样返回的国家。截至2030年,中国还将实施“嫦娥六号”到“嫦娥八号”等月球探测任务,拟建成具备科学探测、科研试验和资源利用技术验证等综合功能的月球科研站基本型[1]。
截至目前,人类一共发射了7辆月球车。按照是否载人,月球车可以分为载人月球车和无人月球车。美国“阿波罗”计划中所采用的月球漫游车由宇航员操纵,作为拓展宇航员活动范围的运载工具,因此在运动控制过程中较少需要地面人员的辅助,主要依赖宇航员的驾驶经验;苏联月球车(Lunokhod-1和Lunokhod-2)与中国月球车(“玉兔号”和“玉兔二号”)均属于无人驾驶的月球车,在运动控制过程中,主要依赖车载传感器及控制器的智能程度及地面人员的远程辅助来完成探测任务。
本文章节详细安排如下:首先对美国、苏联、中国等国家已发射的月球车及相关月球探测任务进行梳理;第1节重点分析了苏联与中国的无人月球车地面遥操作技术及性能对比;第2节介绍了地面移动机械臂连续遥操作技术的最新进展,为后续月球车探测工程提供新的控制理论与技术;第3节结合月表环境特点,分析了月球车实现地面连续遥操作所面临的主要技术难点;第4节对未来月球车遥操作的发展趋势进行了展望;第5节给出了本文结论,以期为中国月球车探测技术的发展提供参考。
1 月球车地面遥操作技术现状
1.1 苏联月球车的地面遥操作模式
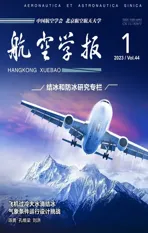
苏联发射的2台无人月球车Lunokhod-1与Lunokhod-2分别行走了10.54 km、37 km,平均移动速度分别为0.14 km/h、0.34 km/h。它们的运动控制均采用了完全由地面操作人员进行远程辅助智能感知、规划、控制的“移动-等待”地面遥操作模式[8-9],其遥操作框图如图1所示[9]。
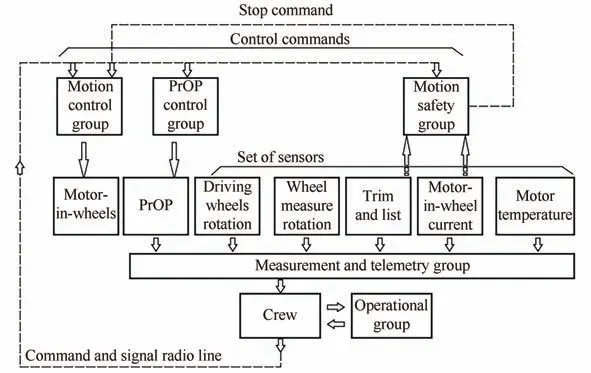
图1 Lunokhod-1与Lunokhod-2月球车遥操作框图[9]Fig. 1 Teleoperation of Lunokhod-1 and Lunokhod-2[9]
在Lunokhod月球车的地面遥操作过程中,其运行场景的反馈信息主要来源于车载的4部高分辨率摄像头。根据执行的功能,其远程控制系统由以下模块组成:运动管理组、安全指令生成组、运动状态估计组,每一组由几个人共同组成功能块。如果车轮发生滑动,操作员则可以基于月球车行驶速度和车轮转速解译遥测信息所发现的现象,并评估这种情况的危险性。传感系统还包括一种具有三自由度与钟摆校正的航空陀螺仪,可以构建出一个沿运动路线的等高线图。所有信息都是通过遥测通道传输到地面操控中心,用于诊断月球车运行状况、底盘子系统操作和运动控制。由于Lunokhod完全依赖地面人员进行远程控制,车上并未装载计算机等智能设备,因此不具备自主功能。
地面操作人员以月面反馈图像作为依据,完成障碍物识别、确定障碍距离、分析道路可通行性以及运动指令规划等一系列工作。月球车则需要基于自身正逆运动学将操作员发送的速度与方向指令转化成各驱动轮的速度及转向轮的方向转角,同时收集月球车运动过程中的行驶状态信息并反馈给地面操作员,为制定下一步移动任务提供参考。由于Lunokhod-2采用了电磁摩擦制动器,其运动速度与行进转向性能相比Lunokhod-1得到了大幅提升。通过地面操作,Lunokhod-1累计工作时间302天,其最大单次连续运行时间为50 s;而Lunokhod-2累计工作时间125天,其最大单次连续运行时间为1档437 s、2档200 s[9]。
在这种完全依靠地面人员操作的模式下,月球车移动性能主要取决于地面操作人员的远程驾驶经验,因此,需要花费很长的时间训练操作员。受下传图像画面质量较低的影响,操作人员只能对月球车进行目视量测和分析,进而使得月球车遥操作效率很低;此外,操作员需要同时处理的数据量偏大,极易产生驾驶疲劳,且难以完成高精度的规划与操作。但是,这种操作模式大大降低了遥操作系统对月球车车载自主能力的要求,进而减少了车载计算与感知元件的负担,在当时的科技水平下已是最佳的选择。
1.2 中国月球车的遥操作模式
中国已经在“嫦娥”探月工程任务中完成了月球车遥操作系统的开发和应用[10-11]。“玉兔号”和“玉兔二号”月球车,均是由北京航天飞行控制中心作为月面巡视探测的地面遥操作中心,负责任务数据通讯、探测任务规划、巡视器导航、指令生成等工作。中国月球车地面遥操作同样也采取了“移动-等待”方式,但是为了提升月球车的行驶安全性,将地面遥操作与器上自主充分结合起来,详细方案如图2所示[11]。
在图2中,地面控制中心与月表月球车系统通过月地通信网络实现信息互传。地面控制中心利用回传的环境数据和月球车状态信息恢复出巡视器周围的地形环境状况并构建遥现场(Lunar Terrain Reconstruction),进而辅助地面操作人员对月球车进行视觉定位与导航规划(Vision-based Navigation and Localization),形成月球车的安全行驶路径方案(Path Planning for Safe Moving)以及车载机械臂的运动规划方案(Motion Planning for Robotic Arm);而后,在地面月球车模拟系统中对月球车及机械臂规划结果进行虚拟演示和验证,再将通过验证的控制指令上传至月球车。月球车依据接收到的控制指令序列进行运动并采集月表信息(Lunar Image Acquisition);在运动过程中,还能够结合器上自主技术完成近距离障碍识别和局部避障(Moving Obstacle Avoidance),并利用携带的仪器开展科学探测活动。
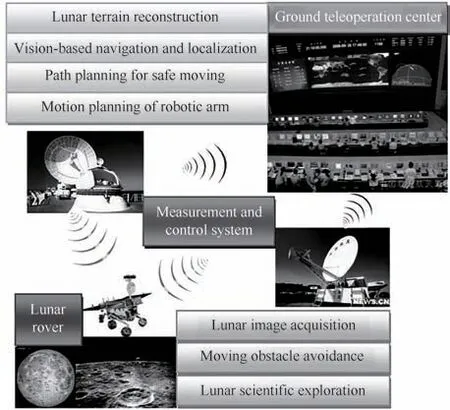
图2 “玉兔号”月球车遥操作系统示意图[11]Fig. 2 Teleoperation system of “Jade Rabbit” lunar rover[11]
在“嫦娥三号”遥操作任务中,地面遥操作中心将视觉定位、三维地形重建、路径规划3项关键技术紧密配合,控制月球车完成了落月点的精确定位和围绕着陆器的远距离避障行进,指引“玉兔号”成功地实现了从着陆器北侧点X到南侧点E的绕行,准确抵达目标位置。与苏联的月球车遥操作方案相比,数字孪生以及人工智能等诸多技术在“玉兔号”上的广泛应用有效提高了操作员的任务作业效率与精度,减少了操作负担;而基于车载传感设备与计算设备实现的器上自主功能又进一步保障了月球车的行驶安全。
中国“玉兔号”累计行驶里程超过100 m;而玉兔二号至今仍在正常工作,成为月表工作时间最长的月球车,累计行驶里程也已超过700 m。然而,由于月面环境较为复杂,中国月球车遥操作采用的“移动-等待”方式效率不高,完成一个站点7~8 m距离的行进通常需要5~8 h,尚未达到地面的连续直接控制,严重影响任务实施效率。
与苏联月球车的完全依靠地面人员的遥操作模式相比,“玉兔号”月球车已经具备了基于车载相机等传感器实现局部自主避障控制的功能,能够更好地完成行驶任务,弥补了由于操作员感知信息缺失所产生的不当操作,提高了月球车的行驶安全性。
1.3 月球车在轨遥操作模式
此外,航天员在星球轨道载人航天器内,通过具有视觉沉浸感、力觉反馈等设备来控制空间机器人执行作业任务的在轨遥操作技术由于能够缩短通信距离,大幅提高遥操作作业效率[12-13],也逐渐在空间机器人上得到了广泛应用,对于解决现有月球车地面遥操作模式效率低的问题具有重要的工程价值。
美国宇航中心在此领域已经做了大量技术预研, 并开展了Surface Telerobotics工程专项,以模拟月球轨道载人航天器内的航天员遥操作月球车在月面部署射电望远镜的作业场景,如图3所示[14]。德国宇航局和俄罗斯宇航局联合开展KONTUR工程专项,由空间站内的航天员通过操纵器遥操作地面机器人执行作业任务[15]。
基于K10漫游车的在轨遥操作测试表明[14]:基于人机交互生成命令序列是星表机器人以操作员为中心进行远程操作的一种有效策略;行星探测车的自主能力(尤其是安全驾驶功能)使得操作员能够更加安全地执行任务;驾驶员通过机器人运动状态和行为的三维交互式可视化界面,可以高效地保持较好的机器人态势感知;在远程操作过程中,月球车利用率始终超过50%的时间,提升了操作效率。此外,通过在轨遥操作,操作人员所需完成的工作量也较少,这表明在操作期间,可以实现多任务的同时作业。

图3 航天员在轨遥操作地面K10漫游车[14]Fig. 3 On-orbit teleoperation of K10 rover by astronaut[14]
与月球车地面遥操作模式相比,由于通信距离降低与通信带宽提升,在轨遥操作技术使得操作者能够及时获取从端的环境反馈信息及力觉反馈信息,具有更好的临场沉浸感,借助于成熟的地面机器人遥操作技术,能够实现更为高效的连续遥操作模式,并完成更为复杂的作业任务。
1.4 月球车遥操作模式性能对比
3种月球车的遥操作模式性能对比如表1所示。Lunokhod系列与“玉兔”系列均采用了地面控制中心的“移动-等待”遥操作模式。但是受移动系统设计参数限制,“玉兔”系列的行驶里程均远小于Lunokhod系列,但是随着计算机水平与传感器水平的提升,可以看出“玉兔号”月球车的车载智能水平得到了极大的提升,与地面操作模式相结合,有效地提升了操作员的操作性能。
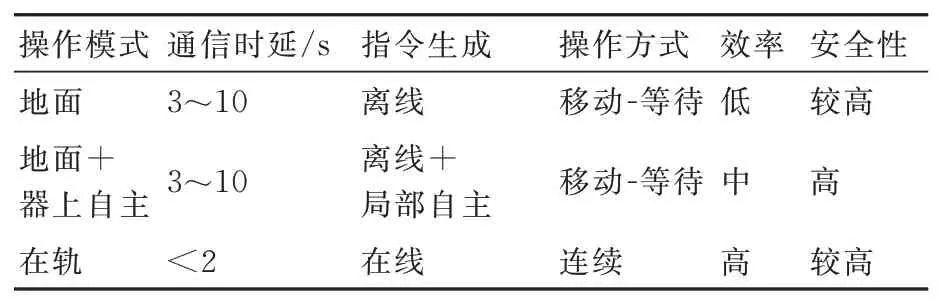
表1 3种遥操作模式性能对比Table 1 Comparison of property of 3 teleoperation modes
对于地面遥操作模式,通信时延受月球-地球距离影响,相比于在轨遥操作(单向时延<1 s)要偏大一些;而在轨遥操作由于通信时延较短,可以连续遥操作月球车,极大地提高了任务效率。这主要是由于前2种模式中,地面操作人员需要对月表环境的回传信息进行场景重构与障碍物识别,而后经过大量的运动规划、优化、迭代而得到的控制指令。但是“玉兔号”所采用的地面遥操作与器上自主相结合的模式能够更好地保证月球车的行驶安全性。
因此,可以预见:在未来的月球探测工程中,采用在轨遥操作模式,以力反馈交互设备为主,视觉、触觉等临场信息反馈与重构为辅的月球车连续遥操作模式在提高月球车作业效率、保障行驶安全性等方面将会发挥重要的作用。接下来,本文将进一步分析月球车连续遥操作可以从地面机器人遥操作现状中借鉴的主要技术及其面临的主要技术难点。
2 地面轮式移动机械臂连续遥操作技术
为了完成科学探测任务,月球车通常会搭载一个多自由度机械臂,构成一个轮式移动机械臂。轮式移动机械臂可以利用移动底盘实现大范围运动,利用机械臂来执行作业任务,在工业、探测、救灾等应用领域都得到了广泛应用,并且大量学者也对其遥操作技术开展了深入地研究。因此,与现有的月球车“移动-等待”遥操作模式相比,地面移动机械臂的连续遥操作模式可为后续的月球探测工程提供大量技术参考。
一个具有时延的机器人双边连续遥操作系统可以用图4所示的双端口网络进行描述[16]:操作 端(Human Termination,HT)、环 境 端(Environment Termination,ET)、通 信 通 道(Communication Channel,CC)、主 端 机 器 人(Master Controller Unit,MCU)、从 端 机 器 人(Slave Controller Unit,SCU)。图4中:qm和qs为主、从端机器人状态;fh和fe为操作端与环境端作用力;fmd和qsd为主端期望反馈力与从端期望速度;T1和T2分别为系统前向和反向通信时延。
机器人连续遥操作系统的控制目标是:操作者通过主端机器人连续发送控制指令至从端机器人,从端机器人对指令进行跟踪控制,并将从端与环境的接触力以及视觉信息等反馈至主端操作者,操作者获得较好地临场沉浸感。为了评估遥操作系统的操作性能,通常采用混合矩阵(Hybrid Matrix)对其进行性能分析:

对于一个机器人双边遥操作系统,当其混合矩阵满足

时,具有最佳的系统透明性。
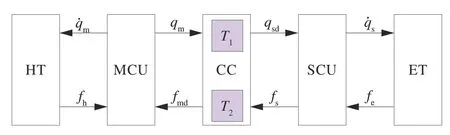
图4 机器人双边连续遥操作系统框图[16]Fig. 4 Robot bilateral continuous teleoperation scheme[16]
2.1 轮式移动机器人遥操作技术
与非移动机器人(比如:机械臂)遥操作相比,轮式移动机器人的遥操作技术具有以下2个特殊的运动学难点[17],如图5所示。
1)从端轮式移动机器人作为移动载体,通常需要在不受限制的平面内运动(如图5(b)所示,理论上移动机器人可以在xy整个平面内运动,航向角为θp),而主端操作手柄的工作空间则是有限的(如图5(a)所示,受操作者手臂运动范围约束,关节角度qmi(i=1,2,3)仅在某一区间内运动),使得主从端的机器人工作空间难以建立合理的遥操作运动映射。
2)在硬质地面上,由于轮地接触存在侧向约束力,轮式移动机器人在运动过程中会受到非完整约束(全向运动轮除外),因此其实际可控运动仅有前进(vs)和转向速度(ωs),侧向速度则恒为0。
这2类难点也是当前轮式移动机器人遥操作研究主要关注的技术挑战,国内外学者面向硬质地面的应用场景也已经提出了大量的解决方案。
为了解决主从端机器人工作空间不匹配的难点,轮式移动机器人遥操作常采用类似于汽车驾驶的控制模式,将主端手柄的位置设定为从端机器人的前进和转向速度指令,即主从端机器人采用位置-速度运动映射[18-20],比如:主端第1关节位置映射月球车前进线速度,即(qm1,vs);主端第2关节位置映射月球车转向角速度,即(qm2,ωs)。
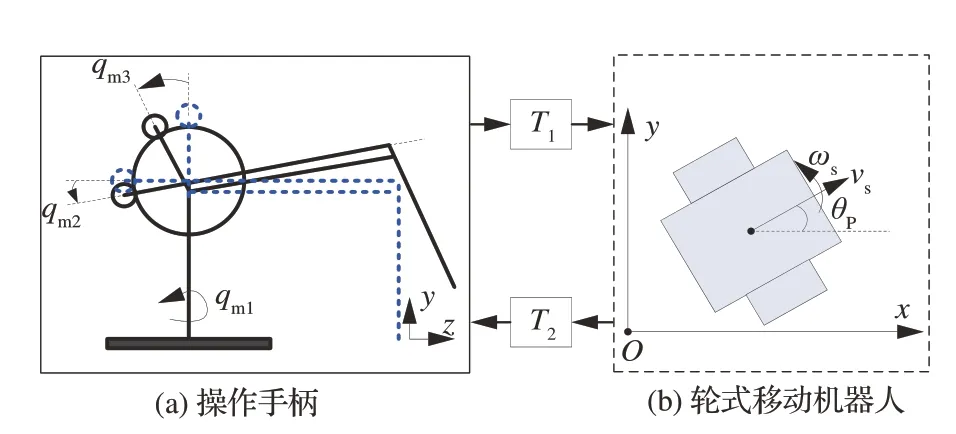
图5 轮式移动机器人遥操作示意图[17]Fig. 5 Teleoperation scheme of wheeled mobile robot[17]
为了保证采用位置-速度映射的主端机器人系统绝对无源性,Lee等[18]在主从端控制模型中引入了包含位置信息和速度信息的新运动变量来 代替原阻抗矩 阵 中的qm或 者q̇m,并 在 主 从 端 分 别 采 用P+d控 制 律实现运动跟踪,在往返时延均为0.7 s的通信条件下验证了较好的指令跟踪性能与力的透明性。在这种模式下,从端轮式机器人需要满足车轮纯滚动约束的理想假设(即环境端口满足无源性条件)。然而,在松软地形下,由于车轮滑转的存在,环境端难以满足端口的无源性假设,Li等[17]进一步提出了采用无源性补偿控制器与PEB(Position Error-Based)遥操作框架相结合的方式来提升运动跟踪性能,实验结果表明即使在车轮高度滑转下,遥操作系统依然具有较好的指令跟踪性能,系统框架如图6所示。
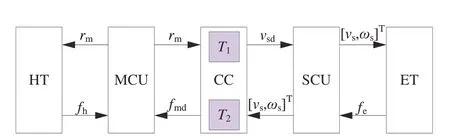
图6 轮式移动机器人双边遥操作系统框图[17]Fig. 6 Bilateral teleoperation of wheeled mobile robot[17]
此外,由于手臂的肌电信号可以反映人类大脑中枢神经对手臂肌肉的调节作用,因此,肌电信号也可以被视为操作员对从端机器人控制意图的一种表达方式,在机器人遥操作系统中得到了越来越多的关注。Luo等[20]提出了一种基于肌电信号和力反馈手柄的混合共享遥操作方法,并采用人工势场法实现了自主避障功能,实验结果表明肌电信号与力反馈相结合的方式在多障碍物场景下可以有效提升任务效率(由60.847 0 s减少至51.756 0 s,路径长度由182.373 6 cm减少至154.877 5 cm),保障机器人安全(最小安全距离由55.08 cm增加至57.53 cm)。这种控制方式也为月球车遥操作系统的主端力反馈设备提供了可行性替代方案。
在轮式移动机器人遥操作过程中,常见的力反馈形式依据不同任务可以总结为以下3类[21]:① 采用从端机器人速度信号设计力反馈算法;② 采用从端机器人的速度指令跟踪误差信号设计力反馈算法;③ 采用从端机器人与环境的作用力信号设计力反馈算法。
在上述提出的遥操作方案中,尽管可以实现在硬质地面(车轮满足纯滚动约束的理想假设)上良好的运动跟踪性能,但是,在机器人执行精准的定点作业任务时,位置-速度映射却会降低作业效率,使得轮式移动机器人的位置控制精度变差。因此,在这种情况下,主从端就需要采用位置-位置映射来满足高精度的作业需求。非完整约束则是在实现位置-位置映射过程中的主要难点,由于操作手柄一般为完整约束,其解决方案主要是采用自主与遥操作相结合的控制方式。
Malysz和Sirouspour[22]提 出 了 基 于 任 务 空间权重矩阵的半自主控制策略,将遥操作控制与自主跟踪控制算法通过任务空间矩阵结合在一起克服非完整约束带来的指令跟踪偏差问题,通过Sigmoid函数完成自主控制开(权重系数为0.25)与关(权重系数为0)的切换,实现了对移动机 器 人 的 位 置 指 令 跟 踪 控 制;Yuan和Li[23]采 用脑机接口技术,提出了一种基于四极势函数的遥操作方法解决非完整约束难点,测试结果表明:操作者的任务平均成功率达到90%以上;华南理工大学赵素娜[24]将脑电信号与非完整约束结合起来,设计了脑电分类结果控制的极坐标PPC曲线和Bezier曲线轨迹实时规划,并设计了基于误差模型的跟踪控制器,5名测试者均能够通过脑电信号实现对移动机器人的协调运动控制。在上述针对非完整约束的轮式移动机器人遥操作过程中,由于主、从端机器人运动学的非对称性,从端机器人在遥操作指令的基础上,设计了自主轨迹规划算法或跟踪控制算法,采用半自主的遥操作控制方式,以此克服非完整约束带来的指令跟踪难点。
在轮式移动机器人遥操作过程中,由于信息滞后,从端机器人极易与周围环境产生非预期的接触,进而降低系统性能。针对松软地形上轮地接触产生的滑转现象,基于时域无源性分析的控制(Time-Domain Passivity Control,TDPC)算法[21],Li等[25]提出了一种改进方法来消耗轮式移动机器人双边遥操作系统中由车轮滑转带来的环境端有源性能量,设计了环境端无源性观测器(POe),基于观测得到的端口有源性能量,实时调整阻尼补偿器系数(αe),以维持环境端的绝对无源性,保证系统稳定性,如图7所示。
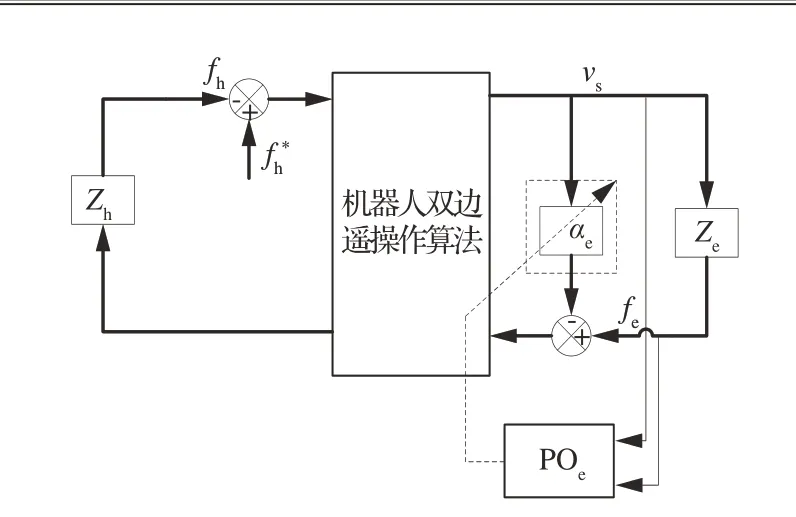
图7 采用TDPC的机器人双边遥操作系统框图[25]Fig. 7 Robot bilateral teleoperation scheme with TDPC[25]
此时,在复杂环境下,由于信息滞后,操作者在主端很难对从端机器人进行实时规避,需要其具备自主检测环境与障碍物的感知能力,并采用自主控制算法完成自主避障以保证行驶安全。人工势场法在机器人自主避障领域有着广泛的应用,通过在场景中构建虚拟的目标点引力场与障碍物斥力场,快速完成机器人避障任务[26-27]。而基于这种虚拟作用力又可以设计主端机器人的力反馈算法,因此在机器人遥操作过程中,这种从端机器人的局部自主避障算法得到了广泛应用。在遥操作过程中,通过感知从端机器人与障碍物的相对方位,构建一种虚拟引力和斥力,当从端机器人向障碍物靠近时,操作者可以通过力反馈算法感知到障碍物的存在,同时通过遥操作与自主避障控制完成安全避障[20]。在遥操作系统中,这种力通常以障碍物为中心建立一个虚拟的人工势能场,来产生一定的斥力,使得机器人在进行遥操作时能够具备自主避障的功能[28-29]。
此外,针对轮式移动机器人编队以及无人车-无人机的编队遥操作也是一个研究热点[30-31]。这属于多从机器人的遥操作问题,为了维持编队任务,操作者一般只对Leader机器人进行直接控制,其他Follower机器人则通过自主控制算法进行跟随并保持队形,通常基于队形保持误差信号来设计力反馈算法。张颖等[31]设计了一种一对多的遥操作系统半物理仿真平台,并基于主从端之间速度偏差与障碍物排斥力设计了2种不同的反馈力,对于从端多机器人的编队问题则采用了虚拟力的形式来维持队形。这些研究不仅丰富了在多机器人场景下的遥操作理论,对于未来的多月球车编队操作任务也具有较好的参考意义。
综上所述,多数轮式移动机器人遥操作技术研究仍是基于硬质地面上车轮纯滚动与非完整约束[32]的理想假设展开的,且多数是基于运动学的遥操作[16]。然而,对于行驶在松软月壤上的月球车,车轮理想的纯滚动及非完整约束假设将难以维持,产生纵/侧滑现象[33],使得其动力学建模十分复杂[34],尤其是月球车与机械臂动力学高度耦合在一起作业时,对月球车的动力学遥操作带来了极大的挑战。
2.2 轮式移动机械臂遥操作技术
轮式移动机器人通过搭载机械臂可以相互协作完成许多科研、探测、作业等任务,在星球探测领域也有着广泛的应用,如图8所示[35]。轮式移动机械臂是一个典型的高度非线性、强耦合的多自由度运动冗余系统,并且引入了车轮的非完整约束;此外,系统中还存在不确定性,比如:未建模动态及轮地突变接触等外界干扰。这些因素都为移动机械臂遥操作带来了极大地挑战。
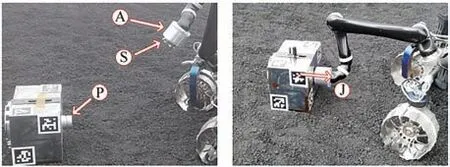
图8 德国宇航中心星球探测用移动机械臂[35]Fig. 8 DLR mobile manipulator for planetary rover[35]
在移动机械臂的遥操作过程中,操作员既需要考虑移动底盘的移动任务,又需要考虑机械臂的多场景作业,因此,需要同时处理的信息量较大。当前,其遥操作策略可大致分为以下2类:
1)采用单操作者进行遥操作,比如:采用位置-位置和位置-速度混合的方法对移动机械臂进行遥操作[36]。如图9所示,在该模式下,操作者仅需要一个力反馈手柄就可以对2个从端机器人进行控制,成功完成了拣选与放置作业。主从端机器人的运动映射则考虑了机械臂与移动底盘的不同任务特性,分别设计了运动遥操作算法,并在操作不同对象时,在二者之间进行切换:机械臂通常用于执行作业,且运动空间有限,采用常规的位置-位置映射,以实现高精度的位置控制;移动底盘需要进行大范围移动,则采用位置-速度映射,以实现快速的运动。此外,还有学者提出了采用远目标点运动约束的遥操作方法进行运动映射[37],采用操作者肢体动作映射移动机械臂进行遥操作[38]。采用单操作者进行遥操作,其系统结构相对简单,但是单操作者需要兼顾移动机械臂多个运动自由度,极易产生疲劳,将移动底盘与机械臂操作对象混淆,进而造成错误决策。
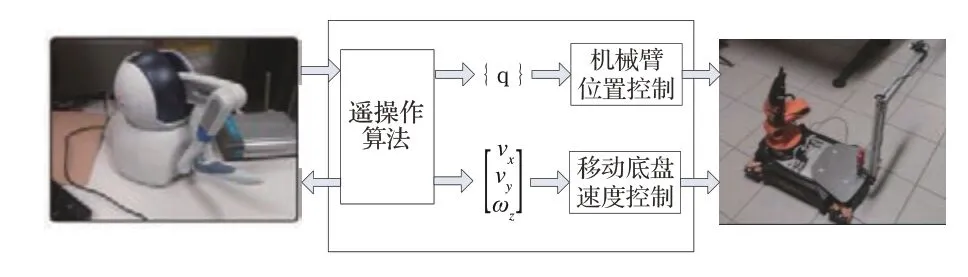
图9 移动机械臂位置-速度混合遥操作[36]Fig. 9 Scheme of position/velocity hybrid teleopera⁃tion of mobile manipulator[36]
2)由于移动机械臂遥操作任务复杂,采用多操作者协同遥操作技术是一个更为有效的解决方案。通常情况下,双操作者各操作一个力反馈手柄,对移动底盘和机械臂分别进行控制,并相互协作,共同完成作业任务。Malysz和Sirouspour[39]针对双臂移动机器人提出了一种非对称的半自主遥操作方法,如图10所示。在双操作者模式下,移动底盘操作者会较少关注车载相机视图或者其他辅助视图,只有当全局俯视图难以反映障碍物信息时才会使用辅助视图;而机械臂操作者则会偶尔观看全局俯视图以确定机械臂的位置,这是由于车载相机视图缺乏足够的深度 信 息。此 外,Zhai和Xia[40]还 提 出 了 一 种 基 于自适应模糊控制的遥操作方法,来控制多个移动机械臂协同完成作业任务。与单操作者切换控制移动机械臂不同对象相比,双操作者可以在每个操作者回路里构建唯一的遥操作框架,且不需要转换其任务属性,进而大大提高任务执行效率,但是双操作者协同控制及力觉协同则是其需要攻克的关键技术。
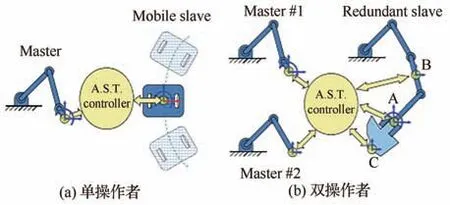
图10 单-双操作者对比示意图[39]Fig. 10 Comparison between single and double opera⁃tors[39]
机器人遥操作理论在单主-单从(单主端机器人-单从端机器人)的双边遥操作系统领域已经取得了丰硕的成果。随着移动机械臂遥操作研究的深入展开,双边遥操作理论开始向多边遥操作理论发展[41-42],学者们分别提出了多主单从、单主多从、多主多从等机器人遥操作系统。这也为空间探测机器人的遥操作提供了理论基础。
综上所述,轮式移动机械臂“地面”遥操作技术存在2个显著的特点:
1)时延较小。通常在1 s之内,信息滞后对于操作者操作性能影响较小,一般采用控制理论设计补偿控制器对时延带来的不稳定进行补偿即可,较少考虑信号滞后对操作者带来的干扰。
2)结构化环境。多数研究均是面向室内或者结构化室外环境。轮地接触与约束通常满足理想的“纯滚动”与“非完整约束”假设。因此,轮地接触对于操作性能的影响通常被忽略掉。
3 “月面”遥操作主要技术挑战
与地面移动机械臂的遥操作相比,月球车遥操作主要具备以下2个特有的难点:更大的通信时延与更复杂的月表环境。因此,这也对机器人遥操作理论在多边遥操作、预测显示遥操作等技术带来了新的挑战。
1)受月地之间远距离影响,通信通道存在以下2个难点:通信中的时间延迟与有限的数据传输带宽。通信延迟包括操作指令的发送延迟和遥测信号的返回延迟,地球和月球之间的最大距离是 4.06×105km,通讯延迟约为1.4 s,加上一般的系统延迟1.1 s,地月回路延迟约为3~10 s左右甚至更大(主要取决于信息传输量),且通常为变时延(Time-Varying Time-Delay),而这种大时延的存在不仅会使得连续遥操作闭环反馈控制系统变得不稳定,且信息滞后极易干扰操作者的决策判断能力。
2)由于月球表面覆盖着一层松软月壤,使得月球车移动过程中,在车轮的纵向及侧向均会存在明显的打滑现象和车轮沉陷现象。这些现象在硬质地面的轮式移动机器人研究过程中极少出现,因此,往往不被学者们所关注。大量关于松软崎岖地形下的轮地接触研究表明[43-44],这些现象会对轮地之间的相互作用机理带来扰动,进而对月球车的运动带来不稳定的外部影响。如果在月球车遥操作过程中忽视它们,会直接威胁到月球车的行驶安全性。
3.1 通信时延
为了对月球车进行有效的远程控制,需要在地面及月球之间建立有效安全的通信通道。然而,较大的通信时延使得连续遥操作闭环反馈控制系统变得不稳定;有限的数据传输带宽会使得操作者在地球端能够获得的反馈信息有限且滞后[45],从而限制了操作者对月球车的操作性能。因此,大通信时延是月球车遥操作的首要难题。
3.1.1 时延补偿策略
时延问题一直以来都是机器人遥操作研究重点关注的一个问题。随着空间探测和海洋探测的深入展开,机器人遥操作系统中的时延补偿技术也得到了快速发展。当前,克服遥操作时延的方法主要有以下2类。
1) 基于电路网络的无源性理论克服系统通信 时 延。1989年,Anderson和Spong将 遥 操 作 控制系统与电路网络系统进行类比,提出了基于电路端口网络理论来分析遥操作系统的设计方法[46]。基于系统无源性理论,设计遥操作系统稳定的控制参数,并克服通信时延所带来的系统不稳定因素。该领域应用最广泛的2个理论是散射理论和波变换理论。
Anderson和Spong提出的散射理论,是基于二端口网络所提出的一套能保证系统在任何时延下都稳定的控制算法[46];1991年Niemeyer和Slotine提出的波变换理论,如图11所示,利用能量流理论克服通信端口的有源性问题[47]。
然而,遥操作系统的通信时延往往并不是固定不变的,当通信时延为变时延时,通信模块不再满足系统无源性。而后,学者们根据不同的遥操作任务,对它们进行了一系列改进[48-49]。
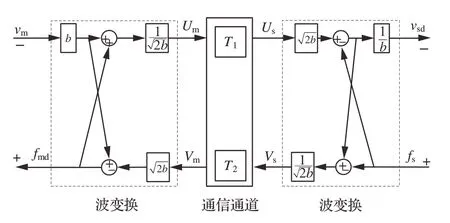
图11 波变换示意图[47]Fig. 11 Scheme of wave transformation[47]
2) 基于预测显示技术克服系统通信时延。许多理论分析和实验结果[50]表明,基于无源性控制的时延补偿方法对解决小时延(<1 s)问题具有较好的效果,而对于大时延(>1 s)的情况,由于信息滞后过大,操作者很难对从端运动状态做出实时准确地判断。因此,学者们采用预测显示技术来克服遥操作大时延,并补偿迟滞的反馈信息,以确保系统稳定性及操作性能。
预测显示技术(Predictive Display)[51-53]是针对空间机器人大时延遥操作的一项关键技术。它通过建立一个虚拟的仿真环境,实时地将操作者发出的指令响应反馈给操作者,在一定的时延之后,从端机器人将会复现预测仿真的结果,使得操作者能够直接对虚拟机器人进行连续无时延的遥操作,以达到对从端机器人控制的目的,由此来克服通信时延对遥操作系统的影响。例如,1993年,德国宇航中心(DLR)研制的六自由度空间机器人ROTEX采用预测显示技术来补偿时延影响,并进行了首次太空大时延遥操作实验[54]。
在机器人遥操作系统中,预测显示系统需要对从端机器人及其工作环境建立精确的物理模型和动力学模型,才能确保系统稳定性和良好的操作性能。然而,由于预测系统难以实现对从端控制对象理想的建模,不可避免地会带来一些建模误差与运动误差,进而会导致虚拟机器人与实际机器人的运动状态存在偏差,干扰操作者的操作指令,甚至导致操作者出现误操作现象。
针对虚拟机器人与实际机器人之间存在的动力学预测偏差,通常采用参数在线辨识/修正方法来提高模型的预测精度[55]。
1)针对未知环境下机器人摩擦、碰撞的线性模型,递归最小二乘法是一种运算简单、收敛速度快的参数在线辨识方法。Haddadi和Hashtrudi-Zaad[56]基于递归最小二乘法对Hunt-Crossley模型的动力学参数进行了辨识。东南大学倪得晶[57]根据碰撞产生的真实力数值与虚拟力数值之间的差异,提出了一种基于最小可觉差与递归最小二乘法的分状态动力学模型偏差修正算法,实验结果表明接触力的估计偏差在初始接触及平稳接触阶段均在10%以下。对于快速动态系统,基于梯度下降的参数在线辨识法可以加快收敛速度[58]。自适应辨识也是一种常用的参数在线估计方法,通常作为自适应控制算法的一部分来提高系统性能[59]。Seraji和Colbaugh[60]采用自适应控制来提升阻抗控制力跟踪的鲁棒性和估计未知环境阻尼和刚度参数。
2)针对从端环境的非线性模型,参数在线辨识的收敛速度通常较慢,限制了其在遥操作系统中的实际应用。Diolaiti等[61]提出了双阶段参数估计思想,实现了Hunt-Crossley非线性模型的 参 数 在 线 估 计。Haddadi和Hashtrudi-Zaad[56]通过将Hunt-Crossley模型线性化,进而可以采用一些线性辨识方法对其进行辨识。Gao等[62]通过将非线性模型线性化与非线性补偿相结合,提出了一种快速收敛的轮地接触力学模型的参数在线辨识方法。在一些复杂环境或未知场景下,机器人与环境的交互作用难以采用提前给定的模型进行准确描述。因此,采用神经网络来拟合从端机器人与环境的动力学模型也逐渐得到了广泛应用[63]。
3.1.2 月球车动力学预测技术
中国“玉兔号”月球车装载了双目视觉导航相机、立体视觉系统、加速度计、陀螺仪等传感器,利用月球车前后站点图像中提取的观测点,基于光束法平差模型的定位方法成功地实现了月球车着月点及各个月面导航点位置的精确解算,设计了低重叠区的快速匹配与全局性高精度三维地形重构系统,这些信息也是地面控制中心进行“移动-等待”遥操作运动规划与验证的主要依据[10]。然而,基于回传环境信息及月球车状态数据,实现高精度的月球车动力学预测,补偿主端临场感所需要的滞后信息,仍然是月球车动力学预测需要进一步克服的技术难点。
与硬质地形相比,在月表松软地形下,车轮极易产生滑转沉陷现象,操作者为了能够对月球车在行驶过程中的安全性、稳定性等进行完整地评估,除了基本的环境信息与地形信息之外,还需要在地面控制中心获取以下月球车动力学特性及运行环境参数,以提升操作者的临场沉浸感。
1)轮地接触力及力矩特性:法向力、牵引力、侧向约束力、驱动阻力矩等。
2)轮地接触运动学特性:车轮沉陷量、纵向打滑参数、侧向打滑参数等。
3)月球车状态特性:月球车位姿、横纵向速度。
4)月球车与障碍物等刚体的接触特性:接触力、月球车接触响应等。
因此,对于月球车遥操作系统,由于缺少从端环境的全局图像反馈或者通信时延较大时,在主端地面控制中心对从端月球车及环境的动力学交互特性进行实时高精度预测有着重大的意义。
与空间机械臂动力学预测及硬地上轮式机器人动力学相比,高保真度一直是月球车动力学预测技术的难点之一。这主要是由于受月表松软月壤的影响,轮地之间易产生纵向/侧向滑动,进而破坏了轮地接触的纯滚动约束与侧向的非完整约束,且轮地交互作用机理复杂,难以建立精准的月球车动力学模型以及轮地接触力学模型。此外,沙土的流动性与堆积特性等也会影响车轮受力状态,进而对其动态特性预测也带来了极大的挑战。因此,在中国的“玉兔号”月球车遥操作系统中,动力学仿真也只用于地面控制中心的离线运动规划及指令验证工作。
面向样机研制、性能测试及远程任务规划等需求,国内外学者基于车轮与整车实验数据,采用经验法针对轮地接触力学展开了深入研究,并且开发出了多款月球车、火星车预测仿真系统。
Bekker 基于传统车辆-地面力学模型,将沉陷模量描述为平板尺寸参数,采用内聚力模量和内摩擦力模量代替沉陷模量,提出了Bekker 正应力 分 布 模 型[64];Janosi和Hanamoto提 出 了 描 述剪切应力与剪切变形量、正应力关系的剪切应力模型[65]。这2个模型构成了地面力学理论的基础,学者们相继提出了多种轮地相互作用力学模型。Senatore和Iagnemma基于轮地相互作用的应力分布、运动变量的测试结果[66],对传统的轮地作用积分模型进行了分析,实验误差在11%以内。此外,颗粒阻力理论也可以可靠地预测刚性车轮-颗粒介质相互作用,其精度在某些情况下甚至超过了地面力学方法[67]。为了进一步提高模型求解速度,丁亮[68]基于应力分布线性化建立了轮地接触作用的封闭解析模型,并提出了该模型的参数辨识方法,对车轮实验数据进行了参数辨识后,模型预测精度可达5%以内。该模型在精度和解算速度上更能满足实时动力学预测平台的开发需求。
美国NASA/JPL实验室为了测试星球车的移动和控制性能开发了一款动力学仿真软件ROAMS (Rover Analysis Modeling and Simulation),其轮地作用力(包括:法向力、挂钩牵引力和侧向力)采用了基于Coulumb摩擦模型与三自由度弹簧阻尼模型进行求解[69],并对星球车的移动性能进行了仿真验证,滑转率预测绝对误差约在10%以内。但是该弹簧阻尼模型相对简单,难以反映复杂的轮地作用关系。Patel等[70]基于Bekker模型,开发了RMPET(Rover Mobility Performance Evaluation Tool)仿 真 软件,该软件可以计算星球车与地面之间的沉陷量和相互作用力等信息,主要用于评价星球车的移动性能,优化构型设计。
吉林大学陈百超[71]基于ADAMS进行二次开发,完成了月球车轮地作用力的解算,并对月球车移动系统的性能进行了分析。哈尔滨工业大学基于研制的国内首个月球车车轮-土壤多功能测试装置,李卫华等在星球车轮地作用力学开展了深入研究,揭示了交互作用力学规律,建立了滑转/滑移驱动等轮地接触力学模型并完成全参数辨识,开发了星球车实时动力学仿真平台——ROSTDyn(见图12)[72],进而完成了中国月球车和火星车的轮地接触力学与移动性能测试,其在稳态下动力学参数最大误差低于12%。
图12 ROSTDyn仿真平台[72]Fig. 12 ROSTDyn simulation platform[72]
综上所述,国内外科研院所基于商业的物理引擎软件或自主研发已经开发出了多个星球车仿真系统,实现了在松软地形上的星球车动力特性分析。但是,大多数模型均是基于经验数据建立的,通常是在车轮稳定运行状态下采集数据进行参数辨识而实现的动力学预测。Iagnemma等[73]通过将轮地接触的经典地面力学方程线性化,并采用线性最小二乘法在线辨识了土壤的内聚力和内摩擦角等参数。Hutangkabodee 等[74]采用Newton Raphso方法对轮地接触参数的内摩擦角、剪切变形模量、承压模量进行了辨识,该方法的计算速度较快、计算精度也较好。Ding等[75]通过线性化正应力和剪应力来简化模型,而后得到了模型的封闭解析解,进而结合实验数据对全部参数进行了离线辨识,得到了较高精度的模型参数。在文献[75]的基础上,Li等[76]针对车轮滑转率预测,对全部轮地接触参数进行了敏感度分析,针对内摩擦角与剪切变形模量提出了用于非线性补偿的有效系数,该方法能够快速消除滑转率的预测误差,达到收敛点只需要2~3个周期。
月球车遥操作实际上是一个动态的控制过程,在运动过程中地形参数、运动状态等变化均会降低其预测精度。因此,基于参数在线辨识与数据驱动的数字孪生技术为解决此问题提供了有效的解决方案。
3.1.3 数字孪生技术
数字孪生(Digital Twin)是以数字化方式创建物理实体的虚拟模型,借助数据模拟物理实体在现实环境中的行为,通过虚实交互反馈、数据融合分析、决策迭代优化等手段,为物理实体增加或扩展新的能力[77]。美国宇航中心已经成功将这种技术应用到了深空探测任务中的高端装备和复杂设备的研制与测控环节[78]。通过数字孪生技术,宇航员将能够实时获得地面人员的指令数据、模拟数据和解决方案,让宇航员能够更加有效地执行操作任务。
数字孪生技术在中国探月工程和载人航天工程中已经取得了较为广泛的应用[79-82]。北京航天飞行控制中心联合国内其他科研院所开发的数字孪生航天任务三维实时可视化飞行控制与工程任务指挥平台、地外遥操作平台等,成功地将数字孪生技术和三维实时可视化虚拟仿真应用到“嫦娥”探月工程和空间机械臂等航天器的在轨测控、对接、遥操作等任务。图13为“嫦娥四号”月球车基于视觉的月球车定位技术与三维场景重构技术建立的数字化仿真场景,并对月球车的行驶路径进行运动规划与模拟[80]。

图13 月球车曲线行走与原地转弯规划仿真[80]Fig. 13 Simulation of curve walking and turning planning for rover[80]
现有的航天器数字孪生系统多是基于几何模型重构(环境重构技术)与运动学模型构建的侧重于虚实场景驱动的数字映射技术。然而,当将数字孪生技术应用于月球车遥操作过程时,由于月球车在松软地形下的运动机理极其复杂,现有的轮地接触模型也多基于经验数据进行拟合而得到,使得其数字模型的保真度较低,难以满足基于预测进行遥操作任务的高精度需求。
因此,近些年,学者们开始尝试利用现场真实的传感器信息去改善预测仿真模型,建立基于数据驱动的轮地接触模型孪生系统迭代优化方法[76],这种方法可有效弥补遥操作系统中预测仿真系统自身所带来的预测误差。
哈尔滨工业大学李卫华等为了补偿机器人遥操作过程中的时滞信息影响,提升操作者的临场感,提出了基于预测显示的三边共享遥操作架构[16,83],如 图14所 示。为 了 进 一 步 提 高 轮 式 移动机器人数字仿真平台在遥操作过程中的滑转率预测精度,以减少从端机器人与预测端机器人的模型差异对该三边遥操作系统的影响,提出了基于数据驱动的模型参数在线修正方法来弥补预测平台与从端机器人之间的滑转率预测误差。
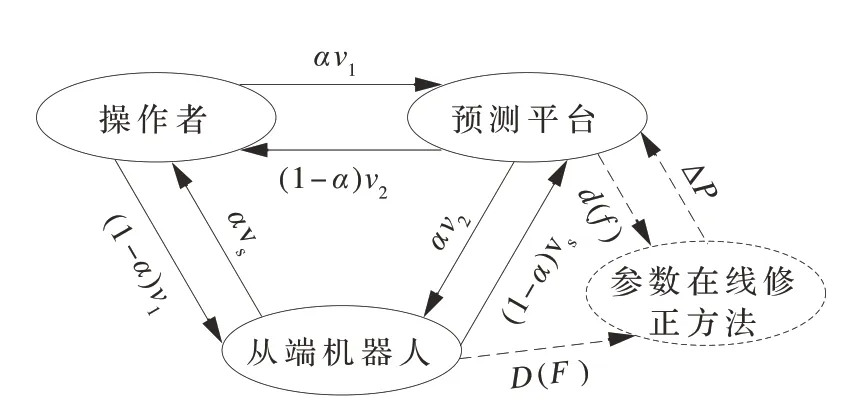
图14 基于数据驱动的三边共享遥操作架构[16]Fig. 14 Trilateral shared teleoperation scheme with data-driven technology[16]
结合3.1.2节与3.1.3节可以看出,国内外研究机构针对星球移动机器人已经进行了大量基于轮地接触力学模型的数字仿真与基于真实场景的数字孪生技术研究,但是对于物理实体与场景之间的交互力学模型进行在线数据修正的研究还不充分。因此,面向月球车及其复杂环境,进行月表场景与月球车运动状态的数据交互,基于场景重构技术与轮地接触力学模型构建有别于传统数字孪生技术的月球车高保真度孪生仿真系统,是未来实现月球车连续遥操作的主要技术难点。
3.2 月表环境
由于月球表面覆盖着一层松软月壤,使得月球车在工作时,在车轮的纵向及侧向均会存在明显的打滑现象和车轮沉陷现象。而车轮纵向/侧向滑动会影响从端月球车对主端操作者指令的跟踪性能,较大的沉陷量会威胁月球车的行驶安全性,对月球车遥操作带来了极大的挑战。月球车车轮在松软地形上的纵向打滑与侧向滑动通常用以下2种方式进行描述。
1) 当月球车在松软月壤上行驶时,由于轮地接触产生的驱动力有限,使得轮地接触面产生剪切变形,进而轮地接触面会出现纵向滑动现象,定义车轮的纵向滑动程度为[17]

式中:si为车轮i的滑转参数;ωi为车轮i的转动角速度;vi为车轮i的前进线速度。
2) 在松软的月球表面,当轮-地相互作用产生的侧向约束力小于月球车的侧向载荷时,车轮的非完整约束将会被破坏,从而出现侧向滑动,比如:月球车在松软斜坡上横向移动,如图15(a)所示。当重力侧向分量(mg·sinα)较大时,由于软土的力学特性,侧向约束力很难平衡这种侧向荷载,因此产生明显的侧向运动,如图15(b)所示。通常采用侧偏角表示侧向滑动程度[43],侧偏角会影响侧向约束力,进而对传统动力学模型带来干扰。

式中:β为月球车的侧偏角;vx为月球车的纵向线速度;vy为月球车的侧向线速度。
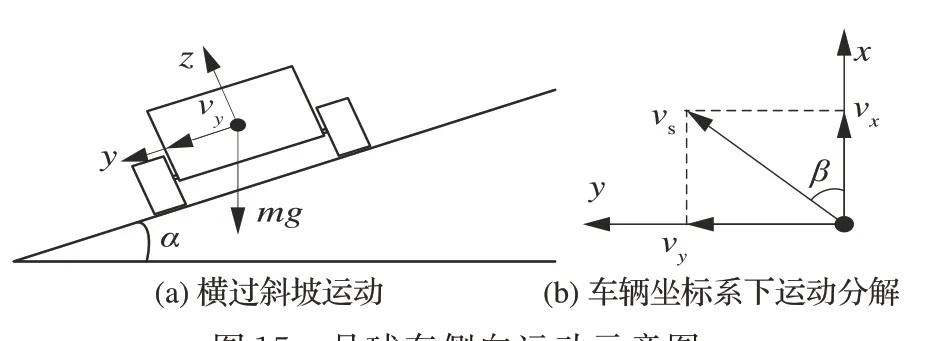
图15 月球车侧向运动示意图Fig. 15 Lateral motion scheme of lunar rover
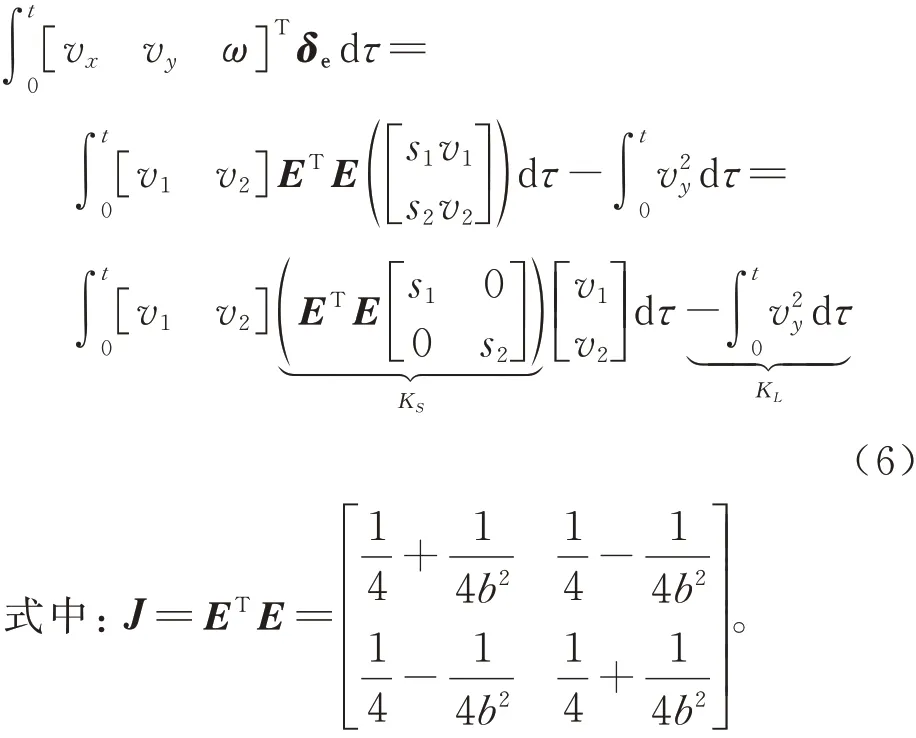
在车轮纵向/侧向滑动影响下,月球车运动学模型可以描述为

式中:vxd和ωd为月球车期望纵向速度与转向速度;2b为左右车轮轮距;为轮地交互作用。
对于上述系统,其环境端子系统能量函数可以描述为
当对月球车进行遥操作时,轮地接触表面会以下3种纵向滑动情况[84]:
1) 对于坚硬地形,轮地接触通常为纯滚动(无滑动)(si=0)。此时,由轮地交互作用构成的环境端为一严格无源系统,可以对从端月球车进行基于速度指令的遥操作,同时,车轮具有良好的指令跟踪性能。
2) 当车轮在松软地形上纵向滑动si>0时,环境端依然是严格无源的,但月球车指令跟踪性能变差。
3) 当车轮在松软地形上纵向滑移si<0时,月球车不仅会产生较大的线速度和角速度指令跟踪误差,而且由于环境端是有源的,因此会造成系统不稳定。
此外,车轮侧向滑动不仅会使整车实际线速度变大,还会影响其实际前进方向,也是从端月球车不可忽视的一个有源性单元。因此,受车轮在松软地形上纵向/侧向滑动参数的综合影响,会造成轮地接触构成的环境端子系统表现出有源性,在遥操作过程中会对月球车注入额外的能量,进而可能造成遥操作系统失稳。此外,车轮纵向/侧向滑动参数的存在还会降低从端月球车对主端操作者指令的跟踪效果[16]。
面向月球探测需求,哈尔滨工业大学李卫华等率先开展了松软地形下的轮式移动机器人运动 学 遥 操 作 研 究[17,72,85-86]。考 虑 车 轮 滑 转,建 立了融合车轮纵向滑动的轮式移动机器人运动学模型,首次揭示了车轮滑转会导致环境端的系统有源性,并提出了基于无源性的补偿控制方法;将预测平台引入双边遥操作系统,提出了一种对称的三边共享遥操作系统。针对“玉兔号”月球车移动系统,由于自由度较多(包括6个驱动电机和4个转向电机),李卫华等提出了双层遥操作控制框架[86]:在遥操作层,车体的线速度和角速度跟随主端的位置指令;在从端,单独为驱动电机和转向电机设计了局部补偿控制器,以跟踪车体的期望速度,消除车轮纵向打滑对指令跟踪的影响,见图16。图中:TC为遥操作控制器; FFC为前馈控制器; FBC为反馈控制器。
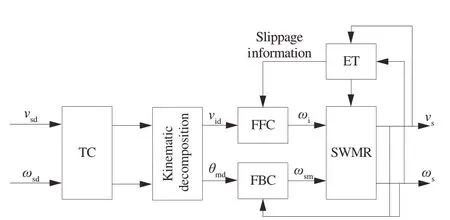
图16 六轮月球车遥操作控制框图[86]Fig. 16 Teleoperation scheme of six-wheeled lunar rover[86]
受松软崎岖月壤影响,月球车车轮与月壤的接触面极易产生纵/侧滑现象,进而破坏传统轮式移动机器人在硬质地形上的纯滚动假设与非完整约束。月球车与机械臂之间受牵连运动影响,他们在运动学和动力学层面上高度耦合在一起。机械臂与作业对象的接触作用会给月球车施加一个反作用力,受车轮纵/侧滑影响,极易对月球车运动状态产生扰动,这是月球车连续遥操作过程中需要重点关注的一个难点。
3.3 月球车遥操作理论难点
综上所述,地-月通信时延与月表环境均对月球车连续遥操作带来了新的挑战。除此之外,对于机器人遥操作理论也带来了新的难点。
1) 针对地面轮式移动机器人的大多数遥操作技术研究仍是面向硬质地形,基于车轮纯滚动与非完整约束的理想假设而展开的,且多数是在轮式机器人运动学的层面进行控制[17]。然而,对于行驶在松软月壤上的月球车,这些理想假设将难以维持,尤其是月球车和机械臂的高度耦合对遥操作系统的设计提出了极大的挑战,尚没有系统、成熟地机器人遥操作理论体系。因此,在车轮纵/侧滑、且车-臂动力学高度耦合的工况下,针对月球车(移动机械臂)的遥操作技术急需相关的理论与技术突破。
2) 通常情况下,基于高精度的虚拟建模技术,预测显示单元是串联在一个双边遥操作系统中,对大通信时延进行补偿的一种主要手段。然而,对于月球车的动力学模型,由于难以建立精准的轮地接触作用力学模型,预测端和从端会产生较大的场景误差[83]。此外,在这种模式下,由于预测端还缺少了与从端的交互,不可避免地会产生指令跟踪误差。因此,基于真实场景数据驱动的预测显示遥操作技术仍然需要深入地研究。
3) 为了更好地控制月球车和机械臂,操作者需要采用不同的运动映射比例尺。操作者在进行遥操作时,力觉临场感是主要的即时感知能力,在具有不同尺度的遥操作系统中,多操作者与操纵手柄的人机交互机制需要进一步解析;而从端月球车与机械臂又高度耦合在一起,需要考虑操作者尺度效应,合理设计力反馈信息,解析多操作者的力觉协同机制[41]。因此,为了提升遥操作系统性能,多尺度下操作者人机交互与力觉协同机制也是机器人遥操作理论的一个新挑战。
4) 通过分解移动机械臂的遥操作任务,采用多操作者分别控制月球车与机械臂,构成一个多主多从的多边遥操作系统。然而,大多数轮式移动机器人或机械臂的遥操作研究仍是基于双边遥操作理论展开的,还没有形成面向多边遥操作系统的成熟理论体系[41];而且,对于月球探测移动机械臂,轮地复杂作用、车-臂-环耦合等都是潜在的不稳定因素;且月球车与机械臂具有较强的动力学耦合,多操作者之间需要合理的力协同机制。因此,面向月球探测环境及技术特点,需要建立移动机械臂的多边遥操作技术。
4 未来展望
自1970年人类第一次成功发射Lunokhod-1登陆月球,到2019年“玉兔二号”首次成功着陆月球背面,人类共向月球发射7辆月球车,地面遥操作一直支撑着月球车的巡视探测过程。随着机器人技术及遥操作技术的不断革新,与以下4项技术充分融合将会极大促进月球车遥操作向着更高效、更智能、更安全的方向发展。
1) 连续遥操作技术将逐步取代“移动-等待”模式。由于月面较为复杂,中国月球车遥操作仍然采用了安全性更高的“移动-等待”方式,尚未达到地面的连续直接控制,严重影响任务实施效率。因此,在地面遥操作或在轨遥操作模式下,考虑通信时延,突破月球车连续遥操作等技术难点,提升远程操作效率,对后续月球巡视探测任务具有重大意义。
2) 月球车多操作者协同遥操作仍将占主导地位。由前文可知,在现有的地面遥操作模式中,通常由多人协同完成基于反馈信息的月球车场景感知、规划与指令生成,可有效保证系统可靠性与行驶安全。在未来连续遥操作模式中,多操作者仍是必要的,一方面多人协作可保证系统可靠性,另一方面也可以协作完成精度更高、流程更繁琐的复杂作业。因此,由多操作者与从端月球车(包括底层移动系统与机械臂作业系统)构成的多边遥操作系统仍需要开展深入地研究。
3) 基于数字孪生的月球车预测显示技术为连续遥操作提供了可行性支撑。月球车动力学预测仿真受到月表环境复杂性和多样性的影响,难以通过单一的机器人动力学建模及机-环交互模型实现对机器人状态演变的准确描述。基于数据驱动的数字孪生机制,构建基于硬件在环的星球移动机器人数字孪生平台,实现星球移动机器人设计/测试/操控全生命周期的移动性能评价、控制算法验证以及交互作业任务,可以为月表环境下的月球车高精度动力学预测提供新方法。
4) 人机共融技术是未来月球探测工程的重要支撑[87]。当月球车在月表执行任务时,受较大的通信时延限制,操作者难以及时应对突发状况。因此,为提升遥操作性能,更好地完成科研探测任务和保证移动机械臂的安全,将从端月球车的局部自主能力融入遥操作系统中,在操作者无法及时响应环境变化时,利用局部自主来进行及时调整。将二者深度融合,一方面可以保证从端机器人的安全,另一方面,通过从端力反馈也可以指导操作者快速、安全地完成任务。
5 结 论
考虑月表复杂环境及作业任务需求,在地-月通信变时延条件下,多操作者协同连续遥操作月球车在月表复杂环境中进行探测活动,是一项高度复杂的系统工程,且具有环境约束条件复杂、系统非线性高、耦合性强、可靠性高等突出特点。如何确保月球车在遥操作过程中的稳定性、透明性、指令跟踪性能及建立多操作者之间的协同机制,是安全、高效地远程控制移动机械臂完成探测任务的核心难点。因此,将现有的地面机器人连续遥操作技术与预测显示、数字孪生、人机共融等技术深度结合,对中国后续的月球探测工程具有重要的推进意义。