基于矢量光场空间调制的光波偏振方向解算方法研究*
2023-01-30王富杰曹晓昱高超文雪可雷兵
王富杰 曹晓昱 高超 文雪可 雷兵
(国防科技大学前沿交叉学科学院,长沙 410073)
基于矢量光场调制与图像处理的偏振测量技术是一种新型的空间调制型偏振检测技术,快速高精度的偏振解算方法是该技术走向实用的关键.为探索快速高精度的偏振方向解算方法,在简要介绍基于矢量光场空间调制的偏振方向检测技术原理的基础上,分析了空间偏振调制型光强分布图像的基本特征,设计并实现了Radon 变换、光强调制曲线检测、径向积分和图像相关检测四种偏振方向解算方法,详细阐述了他们的工作原理和物理思想.为进行算法性能对比,搭建实验系统并采集图像进行了实验验证,分别对四种解算方法的稳定性、速度和精度等进行了对比研究,结果表明,四种方法均可实现稳定可靠的偏振方向检测,光强调制曲线检测、径向积分和图像相关检测三种方法可获得优于0.01 度的角度检测精度,光强调制曲线检测和径向积分法的检测速度较快,综合性能最优,是最有潜力实现实时高精度偏振方向检测的两种方法.
1 引 言
偏振是电磁波的基本属性,偏振方向是电磁波最重要的偏振特征之一.偏振方向的快速准确测量在天空偏振光导航[1−4]、旋光测量[5,6]、旋光色散分析[7,8]、偏振遥感[9,10]等领域具有重要应用.目前实现偏振检测的有效方法主要有调制法[11,12]、多通道分光法[9,13]和干涉法[14,15]等.多通道分光法是将待测光波按分振幅、分波前或分焦平面的原则分为多个通道,并分别设置不同的检偏器件进行检测,具有测量速度快的优势,但该类方法的能量利用率较低并牺牲了部分空间分辨率[16].干涉法是通过分析干涉图像来反演光波的偏振信息,仅适用于单波长或窄线宽光波的检测[17].调制法是一种内涵丰富且应用非常广泛的偏振检测方法,主要包括时序调制型和空间调制型,前者通过旋转测量光路中的光学元件(偏振片、波片等)或在光路中引入光电子调制器件(电光、磁光、弹光调制器等),实现光波偏振信息的检测;后者通常使用空间调制型器件(空间光调制器、相位延迟器、光栅等)对光波的相位(或偏振)进行调制,使其产生随空间位置变化的光强分布,通过对光强分布的分析得到待测光波的偏振信息.空间调制法由于结构相对简单、检测速度快、精度高等优点,近年来受到了研究人员的广泛关注[18−21].
基于矢量光场调制与图像处理的偏振检测法具有典型的空间调制特征,可对偏振方向等偏振特性进行简单直观、快速准确的测量,是矢量偏振光在偏振检测领域的一个新应用[22−24].矢量偏振光是一种偏振态在空间非均匀分布的结构光场,柱对称矢量偏振光是一种具有轴向对称性且偏振分布随空间连续变化的矢量光束[25].一阶柱对称矢量偏振光场(如角向偏振光、径向偏振光)被线偏振片调制,可形成光强呈楔形亮暗分布的偏振图像,通过对图像的分析处理即可得到输入光波的偏振方向等信息.齐晓岩等[26]在专利中公布了一种利用角向偏振片检测线偏振光偏振方向的方法,但对分析偏振调制图像并获取偏振方向的具体方法并未研究.张文静研究组[27]利用角向偏振片开展了显示并测量线偏振光偏振方向的实验研究,但由于图像质量、解算方法等原因,实际测量误差达到了0.66°.国防科技大学的张文静等[1]研究了利用s-波片和光场相机实现天空偏振模式探测的方法与系统,并采用Radon(雷登)变换计算了天空散射光的偏振方向角,但是该方法计算效率不高,特别是图像尺寸较大、角度检测精度要求较高时非常耗时,且对偏振图像的曝光要求很高,局部少量的过曝或欠曝均会对检测结果产生较大误差.因此,研究速度快、精度高、鲁棒性好的偏振图像解算方法,成为基于矢量光场空间调制的偏振检测技术走向实用的关键.
首先简要介绍基于矢量光场空间调制的偏振方向检测技术的基本原理,然后在分析空间偏振调制强度图像特征的基础上,设计并实现Radon变换、光强调制曲线检测、径向积分和图像相关检测四种偏振方向解算方法,并对他们的工作原理和物理思想进行详细阐述.接下来将利用实验采集的图像对上述解算方法从计算速度、精度、稳定性等方面进行对比研究,最后讨论总结各种方法的优缺点,并指出如何利用上述方法实现偏振方向的快速高精度稳定检测.
2 基于矢量光场空间调制的偏振方向检测技术
基于矢量光场空间调制的光波偏振方向检测技术的核心思想是利用矢量光场的偏振态在空间中规则分布的特点,当采用线偏振片检偏时,便会形成空间调制的光强分布图像,通过分析调制图像便可获得入射光波的偏振方向.基于上述思路利用涡旋波片构建矢量光场并实现偏振方向检测的技术原理如图1 所示,依据图1 搭建实验测试系统并开展算法验证.实验中选用632.8 nm 的He-Ne 激光器作为测试光源,积分球(integrating sphere,IS)将入射激光转换为亮度尽可能均匀的测试光场,随后利用起偏器(Lbtek,FLP20-VIS)将入射光转换为线偏振光,线偏振光经零级涡旋半波片(zeroorder vortex half-wave retarder,ZVHR,Lbtek,VR1-633)转换为偏振方向随空间连续变化的矢量偏振光,经检偏器(Lbtek,FLP20-VIS)作用后形成强度呈楔形亮暗分布的偏振图像,再经相机(FLIR,GS3-U3-41C6M-C)采集为数字图像并由计算机分析处理便可得到起偏器、波片零度快轴和检偏器之间的方位角关系.起偏器安装在角度定位精度优于0.001°的精密电动测角仪(precision motor goniometer,PMG,Newport,CONEX-AGGON-LP)上,调整测角仪可定量改变入射光波的偏振方向.固定检偏器和涡旋波片的角度不变,可实现入射光波偏振方向的定量检测.

图1 基于矢量光场空间调制的偏振方向检测技术原理示意图Fig.1.Sketch of polarization direction measurement system based on the spatial modulating of vector light field.
设入射线偏振光波的偏振方向(起偏器方向)与水平方向的夹角为θ1(0 °≤θ1<180°),则入射线偏振光波的Jones 矢量为

零级涡旋半波片的Jones 矩阵为
其中φ(0 °≤φ <360° )为方位角变量,δ(0°≤δ <180°)为涡旋波片零度快轴的方向(初始方位角).
若检偏器的透光轴方向与水平方向的夹角为θ2(0 °≤θ2<180°),则其Jones 矩阵为

经检偏后出射光波的Jones 矢量为
根据马吕斯定律(Malus’s law),线偏振光经零级涡旋半波片和检偏器作用后,形成的归一化光强分布图像为

实际用于线偏振光方向检测时,零级涡旋半波片的零度快轴方向可与检偏器的透光轴方向保持一致或固定位置不变,则光强调制图像的亮区或暗区中心线的方向唯一由入射光波的偏振方向决定,故(5)式可简化为

根据(6)式可以画出理论仿真得到的调制光强分布图,并依据图1 所示的原理图搭建实验系统采集图像.图2 给出了理论仿真和实验中得到的典型光强分布图,图2(a)为理想情况下(无噪声和渐晕效应影响)的理论光强分布图,图2(b)为实验采集的实际光强分布图.

图2 典型的矢量光场空间调制后的光强分布图 (a) 理论仿真图像;(b) 实验采集图像Fig.2.Typical intensity distribution of the spatial modulated vector light field: (a) The calculated pattern in theory;(b) the observed pattern in experiment.
为验证不同偏振方向解算方法的有效性并进行速度、精度、稳定性等性能对比,实验中采集了二组图像用于对比验证,相机曝光时间为13.933 ms,增益为0 dB.第一组图像在同一位置(偏振方向不变)进行连续多次采集,大约每隔2 s 采集一幅图像,共20 幅图像,用于验证解算方法的稳定性;第二组图像在不同位置连续步进采集,电动测角仪带动偏振片每旋转1°采集一幅图像,共采集16 幅图像(测角仪的最大行程为15°),用于验证解算方法的测量精度.
为方便观察实际光强调制图像的强度分布特征与噪声特性,并直观看出渐晕效应引起的光强变化情况,结合相机直接输出图像的分辨率为2048 像素×2048 像素,在图2(b)的实验图像中分别画出半径R=50,250,450,650,850 像素的圆,进一步绘出圆上像素灰度值随方位角变化的光强调制曲线图,如图3 所示.为便于对比,图3 中给出了根据(6)式绘制的光强随方位角变化的理论曲线.由于理论模型中未考虑图像噪声、曝光时间以及渐晕效应的影响,理论光强调制曲线的分布与半径大小无关.
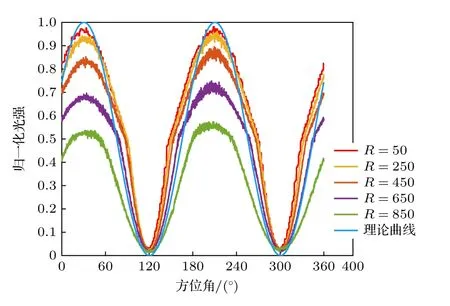
图3 不同半径处的光强调制曲线图(R=50,R=250,R=450,R=650,R=850 像素)Fig.3.Intensity modulated curves with different radii in experimental image (R=50,R=250,R=450,R=650,R=850 pixels).
由图3 不难看出,实验获得的光强调制曲线与理论曲线相比,当半径设置偏小时(如R=50),由于圆上的像素点数较少,光强调制曲线易受到噪声影响,光强值起伏较大,决定偏振方向的极小值或极大值容易产生较大偏差;当半径设置偏大时(如R=650,850),受渐晕效应影响,光强调制曲线的极大值明显下降,并在极大值附近区域曲线发生变形,调制效果受到明显影响.只有当半径大小选择适中时(如R=250,450),才能得到接近理论调制效果的光强随方位角的变化曲线,这将为下一步裁剪图像并设计解算方法提供依据.
3 四种偏振方向解算方法及性能对比
根据光强调制图像(图2)和光强调制曲线(图3)的特征,设计了Radon 变换(雷登变换)、光强调制曲线、径向积分、图像相关检测四种偏振方向解算方法,分别对四种方法的工作原理和物理思想进行阐述,并利用他们对实验采集的两组图像进行分析处理,进一步对速度、精度、稳定性等性能进行对比分析,找到综合性能最优的解算方法.
3.1 Radon 变换
Radon 变换是对一幅二维图像沿平面中任意一条直线进行投影.如图4 所示,在笛卡尔坐标系中,对二维图像f(x,y) 在xy平面中沿任意一条直线的投影(线积分)由下式给出[28]:


图4 Radon 变换原理图Fig.4.Schematic image of the Radon transform.
其中ρ表示积分直线与坐标系原点的距离;θ表示积分的角度方向;g(ρ,θ) 表示积分得到的光强值.当Radon 变换g(ρ,θ) 以ρ和θ作为直线坐标显示为一幅图像时,结果称为正弦图,对图2(b)实施Radon变换得到的正弦图如图5(a)所示.图5(a)中纵坐标为0(ρ=0)的直线(蓝色虚线)表示Radon 变换中过坐标系原点的直线沿不同角度下的积分光强值,所以该直线中的极大值和极小值分别代表了沿图2(b)中亮区中心线和暗区中心线方向像素灰度值的和(积分值),两者对应的横坐标差值为90°.利用Radon 变换进行偏振方向解算时,首先对图像进行Radon 变换得到正弦图,然后提取过坐标系原点直线的积分光强值随角度的变化曲线g(0,θ),进一步找到曲线中的极大值点对应的角度,便可得到入射光波的偏振方向,图5(b)中蓝色实线表示积分直线距离为零时的光强随方位角的变化曲线,图5(b)中红色虚线对应的角度即为入射光波的偏振方向.

图5 Radon 变换的正弦图及其光强分布 (a) Radon 变换的正弦图;(b) Radon 变换时积分直线距离为零时的光强分布Fig.5.The sinogram and the intensity distribution of Radon transform: (a) The sinogram of Radon transform;(b) the intensity distribution of zero integral distance in Radon transform.
3.2 光强调制曲线检测
根据(6)式,在理想的光强调制图像中,空间光强分布仅与角度有关,而与半径无关.因此,提取某一半径下光强随角度变化的光强调制曲线,找到曲线中极大值或极小值对应的角度,即可确定入射偏振光的偏振方向.然而在实际图像中,由于图像噪声、渐晕效应等因素的影响,半径过小或过大时的光强调制曲线将会带来较大误差,因此,实际测量时选择合适的半径非常重要,本次实验中选择提取半径为400 像素点处的光强值绘制光强调制曲线,根据实验中采集的16 幅间隔为1 度的图像绘制的光强调制曲线如图6(a)所示,图6(b)为45°范围内局部放大后的效果,可见测角仪均匀旋转获得的光强调制曲线也是均匀分布的,间接说明了利用光强调制曲线进行偏振方向角的检测是可行的.
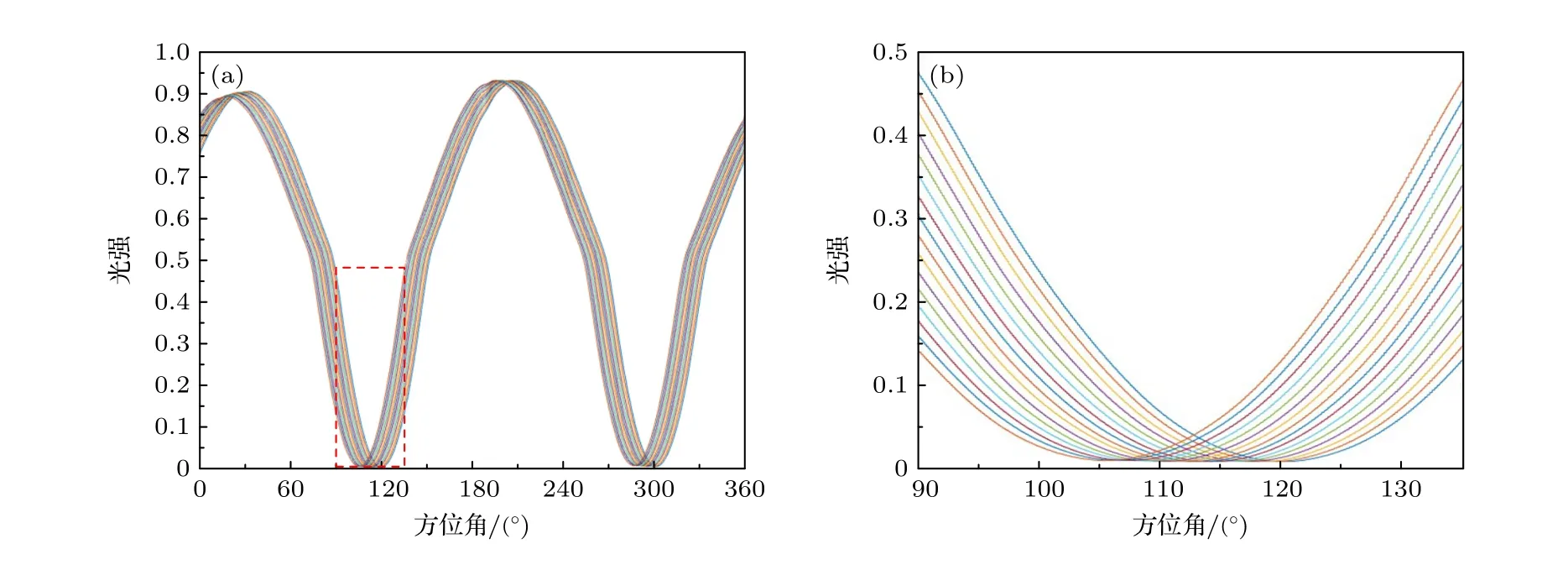
图6 16 幅角度间隔为1°图像的光强调制曲线 (a) 360°范围内的光强调制曲线;(b) 45°范围内局部放大图Fig.6.Intensity modulated curves of 16 images with 1 degree angular interval: (a) Intensity modulated curves in 360°;(b) partial enlargement within 45°.
3.3 径向积分
光强调制曲线检测仅使用了某一半径下的图像信息,造成了二维图像中大量数据的浪费,同时容易受到图像噪声的干扰.为了更加充分地利用二维图像的数据,同时降低图像噪声的影响,设计了径向积分算法.径向积分的计算过程如图7 所示,选取图像质量较好的半径在200 到500 像素的圆环,在角向方向以0.01°为间隔,将圆环中的各像素灰度值沿径向方向进行积分(求和),得到光强随方位角的变化曲线,通过类似光强调制曲线求极值的方法,便可得到待测光波的偏振方向.

图7 径向积分法的原理示意图Fig.7.Schematic diagram of radial integration method.
3.4 图像相关检测
前三种方法均将二维图像的数据转化为一维数据进行信息提取,忽视了图像整体信息的利用.为充分利用二维图像的全部数据,设计了图像相关检测法.在实际采集的光强分布图像中,利用感兴趣区域(region of interesting,ROI)检测的方法快速获得亮区中心线的初步方向,并将其作为初始方向来生成模板图像序列.为降低随机图像噪声的影响并提高测量精度,以初始方向为中心,在± Δθ度范围内、以 dθ(如0.01°)为步长生成一系列的模板图像,分别与实验图像进行相关运算,其中相关度最高的模板图像亮区中心线的方向,即为实验中待测光波偏振方向的最佳值.图像相关计算的过程为

式中,Iexp,Isim分别为待测实验图像和仿真生成的序列模板图像; Δθ,dθ分别为相关运算的角度范围和计算步长.
3.5 四种解算方法对比
通过对以上四种方法的计算原理分析,不难发现它们都利用了空间偏振调制形成的沙漏型图像(光强呈楔形亮暗分布)的角向或径向对称特征,都可实现偏振方向的有效检测.Radon 变换利用的是径向方向的像素灰度值求和,变换后图像的像素利用率不高、计算冗余量大;光强调制曲线检测是取某一合适半径下的光强灰度值,绘制其沿角向方向的光强变化曲线,图像利用率不高,但计算量明显减小;径向积分综合了前两种方法的特点,同时利用了角向和径向两个维度上的部分图像数据,计算量相对较小;图像相关检测利用的是整个二维图像的像素灰度值信息,图像利用率高,但计算量大.下面利用实际采集的两组测试图像对他们进行对比验证.
为改善计算性能,首先对采集到的图像进行了相同的裁剪、灰度拉伸以及滤波降噪预处理.为保证解算精度,对Radon 变换、光强调制曲线检测和径向积分三种方法,在初步计算结果的基础上进行了曲线相关运算.为了能够获得准确的计算结果,计算角度范围为±3°,计算步长为0.01°;对图像相关检测,在保证获得准确计算结果的前提下,为节约计算时间,计算角度范围为±0.3°,计算步长为0.01°.选用的计算平台为戴尔台式机(CPU: i7-10700F,内存: 16 G,固态硬盘: 512 G,显卡: GTX1660).
对在同一位置处采集的第一组20 幅实验图像,分别采用四种方法进行计算以验证其测量稳定性.将20 次测量结果的平均值作为标准值,并以它为基础计算每种方法的最大误差、平均误差、标准差以及平均耗时,所得结果如表1 所列.由表1可见,四种方法20 次解算的平均误差和标准差均可控制在0.005°以内,均表现出了良好的稳定性;除Radon 变换非常耗时之外,余下三种算法的耗时均在百毫秒量级,其中光强调制曲线法的耗时最少.此外,四种方法得到的计算结果平均值具有一定的偏差(最大相差约0.2°),Radon 变换和光强调制曲线两种方法的数据利用率低,受图像噪声及外界因素的影响较大,解算得到的误差也较大;而径向积分和图像相关检测解算利用的图像数据多,解算结果与真值更为接近.

表1 四种解算方法对同一位置数据处理结果的对比Table 1. Comparison of the calculation results by using four algorithms with the data in the same location.
对采用精密电动测角仪带动偏振片旋转采集的第二组16 幅实验图像,分别采用四种方法进行解算并验证其解算精度.考虑到电动测角仪的单向重复定位精度为0.64 mdeg,实验中以测角仪的转动角度为标准值,各算法的解算结果与其相比较得到解算精度.对测角仪1 度步进间隔旋转15 次得到的16 幅图像(含初始位置),解算结果如图8 所示,同时根据解算结果得到了平均转角(15 次测量1 度转角的均值)、最大误差、平均误差、标准差和平均耗时,所得结果如表2 所示.由图8 和表2可知,Radon 变换具有最大的解算误差,解算结果的波动起伏也相对较大,光强调制曲线检测、径向积分和图像相关三种方法的解算精度相差不大,均可获得优于0.01°的解算精度,15 次解算的标准差均小于0.007°,表明解算结果的稳定性也较好.在耗时方面的表现,Radon 变换冗余计算最多,需要大约67.1860 s;光强调制曲线检测法所需时间最短,仅需0.3019 s;径向积分与光强调制曲线检测法虽然均对角向数据进行了相关计算,但增加了将部分二维圆环数据沿径向积分为一维光强曲线的过程,所以较光强调制曲线检测法的耗时更长,需要大约0.4335 s;图像相关检测由于实施了二维图像之间的相关计算,耗时相对径向积分和光强调制曲线检测法更长,需要大约0.8810 s.

表2 四种解算方法对15 个旋转角数据处理结果的对比Table 2. Comparison of the calculation results by using four algorithms in 15 rotation angles.
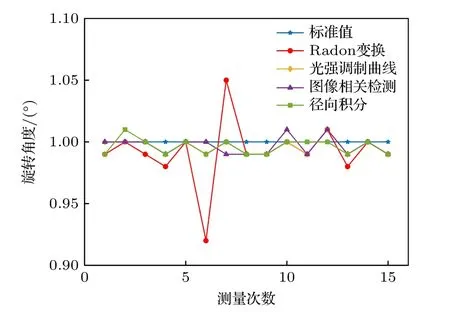
图8 四种算法解算的15 个旋转角对比Fig.8.Comparison of 15 rotation angles obtained by four algorithms.
4 结 论
基于矢量光场调制与图像处理的偏振测量技术是矢量偏振光在偏振检测领域的一个新应用,为了在空间偏振调制型光强图像中提取出偏振方向等信息,设计并实现了Radon 变换、光强调制曲线检测、径向积分和图像相关计算四种偏振方向解算方法,并搭建实验系统采集图像进行了算法的性能对比验证.结果表明,四种方法均可对偏振方向实现稳定可靠的检测,且光强调制曲线检测、图像相关检测和径向积分三种方法的角度检测精度均可优于0.01°.此外,光强调制曲线检测和径向积分法的检测速度较快,在300—400 ms 内可实现一次有效检测,优化算法或减小图像尺寸可进一步缩减耗时,综合性能表现优异,是最有潜力实现实时高精度偏振检测的两种方法.
