融合几何特征的ICP改进算法在数字化测量评价中的应用
2023-01-28蔡项宇何小妹
蔡项宇,何小妹
(航空工业北京长城计量测试技术研究所,北京 100095)
0 引言
计量作为测量及其应用的科学,正在加速数字化转型[1-2]。数字化测量评价作为智能制造领域中连接产品设计和生产的纽带,在推进数字化转型中起着至关重要的作用[3-5]。为实现零件的数字化测量和评价,需要构建零件的检测模型和实测模型,通过零件检测模型和实测模型的对齐,实现待测曲面的实测点云数据自动分割,建立对应的零件参数评定误差模型,完成零件检测的数字化评定。借助非接触式测量设备得到零件的实测点云数据,完成零件的检测模型和实测模型中点云数据的配准对齐是进行零件合格判定的基础,是实现零件检测数字化评定的重要环节之一。
目前主流的配准方法可以分为基准对齐和最佳拟合对齐两种[6]。基准对齐的原理是在检测模型的基准特征与实测数据对齐的基础上,分析和评价零件的几何参数。最佳拟合对齐的原理是在检测模型和实测模型中的全部点云数据对齐的基础上,分析实际加工型面的偏差。为完成基准对齐或最佳拟合对齐,经常采用最近迭代法(Itera⁃tive Closest Point,ICP)[7]以及各种改进算法进行点云的配准。CHEN等人[8]提出了点到面(Point to Plane)的ICP改进算法,通过最小化配准误差,将源点云和目标点云配准到同一坐标系下。钟莹等人在采用主成分分析法(Principal Component Analysis,PCA)进行粗配准的基础上,引入距离和矢量阈值对ICP算法进行改进,从而提高配准精度[9]。Weimin Li等人在点云与CAD模型配准的工作中,提出一种基于动态调整因子的ICP配准算法,迭代步长随调整因子动态变化,从而提高配准效率[10]。朱玉梅等人依据双标准空间采样(Dual-Normal-Space Sampling,DNSS),将旋转收益应用到精配准点选择上,但存在配准效率较低的问题[11]。孙炜等人融合轮廓特征,将改进的ICP算法应用到线激光点云配准工作中,提高了线激光点云配准速度[12]。
虽然众多学者对ICP算法进行了改进,但是改进算法仍然需要依赖良好的初始值,且配准精度和配准速度不尽相同。针对此问题,本文提出融合几何特征的ICP改进算法,借助零件的实测点云数据中存在众多几何特征(本文中特指点云的曲率信息以及坐标点和其邻域点之间的夹角)的特点,将其融合到ICP算法的特征点选择和最优目标误差函数中,解决ICP配准算法依赖初值的问题,实现零件检测模型和实测模型中点云数据的一步配准,为零件的数字化测量和评价提供技术支撑。
1 融合几何特征的ICP改进算法
1.1 传统ICP算法数学模型
理论点云P由三维坐标点pi组成,即P={pi|i=[1,n1]},实测点云Q由三维坐标点qi组成,即Q={qi|i=[1,n2]}。ICP算法的目标是在刚性变换的前提下,将实测点云Q进行空间变换,使其与理论点云P重合[13]。目标函数如式(1)所示,利用目标函数进行计算,使理论点云P和实测点云Q之间的欧式距离最小,从而得到最优的空间变换矩阵[R,T]。

式中:N为理论点云P和实测点云Q之间对应点的数量。
1.2 ICP算法的改进
ICP算法在配准过程中默认寻找两组点云中欧式距离最近的对应点,但当初始位置相差较大时,ICP算法认为距离最近的点就是对应点,会产生一定数量的错误对应点,容易陷入局部最优解。针对此问题,本文提出了融合几何特征的ICP改进算法,具体流程如下:
1)在零件的理论点云P和实测点云Q对应点之间的欧式距离保持最小的同时,使对应点的曲率差值C(pi,qi)以及法向量夹角差值W(pi,qi)也保持最小。融合几何特征的ICP改进算法的目标误差函数为

2)从零件的实测点云Q中选取子集利用k个相邻点的协方差计算子集中每点的曲率以及该点和邻域点的法向量夹角计算公式分别如式(3)和式(4)所示[14-15]。在计算法向量时,需要基于邻域方向一致性传播的方法进行法向量方向调整,同时计算理论点云P中每点的曲率和法向量夹角

式中:λ0,λ1,λ2为该坐标点的k个相邻点的协方差矩阵对应的三个特征值,满足λ0≤λ1≤λ2。该坐标点的法向量vi为特征值λ0对应的特征向量。式中:vi为该坐标点的法向量;vij为该坐标点的第j个邻域点对应的法向量。

3)设定曲率特征阈值τC和法向量特征阈值τW。若并且τW,则选取的特征点符合要求,否则删除该特征点。
5)根据步骤4)中的对应关系,采用奇异值分解(Singular Value Decomposition,SVD)的方法计算相应的旋转矩阵R和平移矩阵T(具体计算过程详见文献[16]),使得目标误差函数达到最优。
6)利用步骤5)中的旋转矩阵R和平移矩阵T,将对应点进行更新,得到新的对应点计算公式为

8)比较目标误差函数值F'与提前设定的阈值εF,若F'≤εF,则迭代结束,否则继续进行迭代。εF的设定与点云配准后所有对应特征点的距离之和有关,数值越小对点云配准的要求越高,配准时间也随之增加。本文中εF设置为0.2,可满足后续依据理论点云的位置对实测点云进行分割的需求。
融合几何特征的ICP改进算法流程图如图1所示。

图1 融合几何特征的ICP改进算法流程图Fig.1 Flow chart of improved ICP algorithm incorporating geometric features
2 实验验证
2.1 实验对象及实验条件
以复杂曲面标准件的点云配准为例进行研究。复杂曲面标准件依据实际工程应用中常见的几何参数设计而成,对于零件几何参数的数字化测量和评价具有借鉴意义。实验中,采用GOM三维结构光扫描仪进行测量,其软件配置为SoftWare 2016;使用AMD 5800H计算机进行运算,其软件配置为Win10,RAM为16 G。
2.2 理论点云的获取
复杂曲面标准件的检测模型以中性文件STEP格式进行存储,检测模型中的实体模型信息以边界表示(B-rep)的方式进行描述,但这种表示的数据结构无法直接与实测点云进行配准,故借助开源几何内核库OpenCascade的Python封装库Py⁃thonOCC,利用write_stl_file函数将STEP文件转换为STL文件(配置参数线性方向偏差设为0.001,角度偏差设为0.1),如图2所示,其中红色的点云是STL文件中的顶点坐标。

图2 理论模型和理论点云Fig.2 Theoretical model and theoretical point cloud
2.3 实测点云的获取
利用三维结构光扫描仪对复杂曲面标准件进行测量,在经过数据去噪、多视角点云拼接之后,得到复杂曲面标准件的实测点云,如图3所示。

图3 实测点云Fig.3 Measured point cloud
2.4 数据预处理
1)点云数据是表征零件表面形貌的杂乱无序、数据量庞大的三维坐标点集合,为提高后续搜索和计算处理速度,借助KD-Tree算法[17]得到复杂曲面标准件实测点云和理论点云的空间拓扑关系。
2)曲率反映了点云表面的凹凸程度,具有良好的特征表述,如图4所示。为提高配准速度,同时保留复杂曲面标准件中丰富的几何特征,提出一种基于曲率的体素采样方法,具体步骤为:

图4 实测点云的曲率分布Fig.4 Curvature distribution of measured point clouds
①计算实测点云中每个坐标点qi的法向量vi和对应k邻域坐标点的法向量{vi1,vi2,…,vij},j=[1,k],按照式(6)计算每个点qi到其k邻域点的法向量夹角的均值αi,以均值αi近似替代点云qi的曲率。

②设定曲率阈值αt,当αi≥αt时,判定所在区域为特征明显的区域Varea,反之则判定所在区域为特征不明显的区域VI-area。
③对区域Varea和VI-area分别采用不同大小的体素核进行采样,经采样后的实测点云如图5所示。

图5 经采样后的实测点云Fig.5 Measured point cloud after sampling
2.5 点云配准
复杂曲面标准件的理论点云和实测点云在进行配准前,初始空间位置如图6所示,其中标记为红色的是理论点云,标记为蓝色的是实测点云,可以看到两组点云的初始空间位置差异很大。

图6 点云配准前的初始位置Fig.6 Initial position of point cloud before alignment
应用融合几何特征的ICP改进算法进行点云配准,结果如图7所示,其中标记为红色的是理论点云,标记为蓝色的是实测点云。

图7 点云配准结果Fig.7 Point cloud registration results
3 实验对比与分析
为验证融合几何特征的ICP改进算法的实际应用性能,将该算法的配准结果与ICP算法的配准结果进行比较。对理论点云和实测点云进行ICP算法配准,结果如图8所示。对比图7与图8的叶片部件局部放大图可知,使用ICP算法配准时,两组点云之间存在明显的配准偏差,而融合几何特征的ICP改进算法则具有更优秀的配准结果。

图8 ICP算法的配准结果Fig.8 Registration results of ICP algorithms
为了评估算法在图6所示的点云初始位置差异较大的情况下的配准收敛性,记录ICP算法和融合几何特征的ICP改进算法在配准过程中对应点之间的均方根(Root Mean Square,RMS)随迭代次数的变化情况,结果如图9所示,可以看到ICP算法在第54次迭代之后RMS不再减小,表明此时ICP配准算法陷入了局部最优解,而融合几何特征的ICP改进算法在第12次迭代后已经成功完成配准任务,证明融合几何特征的ICP改进算法的收敛速度和配准准确性明显优于ICP算法。
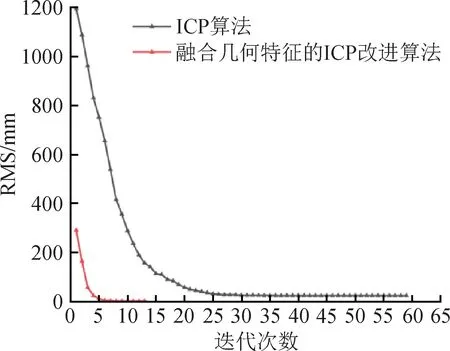
图9 收敛速度和配准误差的比较Fig.9 Comparison of convergence rate and matching error
为进一步验证融合几何特征的ICP改进算法在数字化测量评价中的应用有效性,将该算法的配准结果与采用ICP算法、快速全局配准加ICP配准算法、交互式粗配准加点云处理软件CloudCom⁃pare的精配准方法的结果进行比较,如表1所示。

表1 配准结果对比Tab.1 Comparison of registration results
从表1中可以看出,融合几何特征的ICP改进算法的RMS与交互式粗配准加点云处理软件Cloud⁃Compare的精配准方法的RMS结果一致,与快速全局配准加ICP配准算法的RMS相差0.0001 mm,间接证明了融合几何特征的ICP改进算法的有效性,并且其配准精度满足后续曲面实测点云自动分割和评价方法的需求。如果两组点云只进行ICP算法配准,从对应点之间的RMS = 23.0165 mm可以看出,配准结果陷入局部最优解,只有达到最大迭代次数才结束点云的配准,所以计算时间不能作为参考。CloudCompare点云处理软件在精配准前,需要进行交互式粗配准,总体计算时间无法统计。融合几何特征的ICP改进算法因需要对点云中每点计算曲率和法向量,虽然比快速全局配准加ICP配准算法的计算时间多27.54 s,但却减弱了对良好初始值的依赖程度,缩短了点云配准的流程。
4 总结
提出了一种融合几何特征的ICP改进算法,将点云的曲率差值和法向量夹角差值融合到特征点选择和目标误差函数中,不需要依赖良好的初始值即可达到快速全局配准加ICP算法配准的近似精度,在保证了配准准确性的同时,简化了点云配准流程,为实现基于理论点云的曲面实测点云自动分割以及零件数字化测量和评价提供了重要技术支撑。
