电力电子变换器故障诊断半实物仿真系统设计
2023-01-27蔡逢煌詹铭松柴琴琴
蔡逢煌,詹铭松,柴琴琴,2
(1.福州大学电气工程与自动化学院,福州 350108;2.新能源装备检测福建省高等学校重点实验室(莆田学院),福建莆田 351100)
0 引言
随着智能电网建设及可再生能源的快速发展,对于电力电子变换器故障诊断的科学实验探究越来越成为高校研究的一个前沿技术,这对培养学生理解各类电路的原理和运行模式起着至关重要的作用[1]。目前常用的解析模型故障诊断法通过数学建模实现故障诊断,已在一定范围得到应用,对一些诊断问题取得了积极而显著的效果[2-5]。但同时也存在一些亟待解决的问题——电力电子电路的非线性、故障的特殊性与多样性问题。随着机电设备复杂性的增加,基于建立数学模型的故障诊断方法在实际应用中受到了限制[6]。互联网和工业大数据的发展,使得人工智能算法也越来越多地用在电力电子的故障诊断上。约70年代末,我国着手研究该技术,通过学习国外的相关研究内容,逐渐发展与完善了我国故障诊断技术手段。目前关于电力电子与人工智能结合方面的内容少之又少,需加快将该方面各种实践、实训平台、半实物仿真平台引入到专业课的教学中[7-8],为培养面向工业界的专业技术人才发挥积极作用[9-12]。
双有源全桥(Dual Active Bridge,DAB)变换器凭借功率高、电气隔离和模块化等优点在双向DC-DC变换模块中得到了广泛应用,对DAB变换器的故障诊断受到了研究者的广泛关注[13-14]。本文梳理了DAB 变换器的工作原理以及开路故障定位分析,按照故障位置定义故障类型,详细论述了半实物平台的搭建以及提出的新型人工智能故障诊断算法,通过半实物仿真和运行展示,帮助学生在有限教学时间内学习拓展专业知识,并通过展示的应用方法更加深入地了解基于人工智能算法的电力电子变换器开路故障诊断,提升学生的专业知识应用水平。
1 DAB变换器工作原理
DAB的电路结构如图1 所示,主要由1 个高频隔离变压器T、2 个H全桥、1 个串联电感L以及10 个电容组成。其中u1、u2分别为DAB 两侧端口电压,n为变压器匝数比。根据DAB的结构对称性,2 个H全桥之间以及全桥内部各存在一个移相控制变量,称为移相比。DAB电压调节比定义k=U1/nU2。

图1 双有源全桥变换器电路结构
DAB最简单的移相控制方式为单移相调制。该控制方式中H1桥内的移相角为P1,称为内移相比。两侧H全桥之间的移相角为P2,称为外移相比。通过控制两个H桥之间的移相角P2来控制功率传输的大小和方向。但是在单移相控制中,若u1≠nu2,即电压调节比不为1 时,电路中环流大、软开关范围小等缺点会导致损耗增加,系统效率降低,为改善单移相的调制方法,近年来又有扩展移相(extended-phase shift,EPS)、双重移相和三重移相等移相调制方法。本文以DAB的EPS 控制方法为代表具体讲述。图2 给出了采用EPS控制时该变换器的主要工作波形。在这种控制方式下,每个桥臂上2 只开关管均为180°互补导通;副边桥臂斜对角的两只开关管同时开通和关断,这样副边桥臂中点电压uCD占空比为50%;原边两个桥臂采用移相控制,S1和S2构成超前桥臂,S3和S4构成滞后桥臂,两个桥臂之间存在一个移相角P1,通过控制这个相角差来控制原边桥臂中点电压uAB的占空比。

图2 扩展移相控制下的主要工作波形
2 面向DAB变换器故障诊断
2.1 变换器故障特征分析
对功率管S1开路故障进行分析,得到信号波形如图3 所示,7 个工作模态如图4(a)~(g)所示。

图3 S1 开路故障时的工作波形
模态1[t0,t1)如图4(a)所示,该模态初始时刻uAB=0,uCD=-u2,当S2关断时,电容C1放电、C2充电;当C2和C1完全充放电到u1和0 时,续流二极管D1将导通,在该模态时,变压器原边电压为-nu2,电感电流iL开始线性减小。
模态2[t1,t2)如图4(b)所示,该模态初始时刻uAB=u1,uCD=-u2,S3开始关断、S4开始导通,电容C3充电、C4放电,当C3和C4充、放电至u1、0 时,二极管D4导通,电感对电源u1馈能,电感电压uL减小,iL以斜率继续减小。
模态3[t2,t3)如图4(c)所示,该模态初始时刻时uAB=u1,uCD=u2,S6和S7同时关闭,电源u2对电容C6、C7充电,C5、C8放电,当C6、C7充至u2,C5、C8放电至0 时,续流二极管D5、D8导通。此时变压器原边电压为nu2,uL=u1-nu2。
模态4[t3,t4)如图4(d)所示,该模态初始时刻时uAB=0,uCD=u2,iL减小至0 并向正方向流动,但由于S1故障无法导通,故电容C2放电、C1充电。当C1和C2上的电压值等于u1和0 时,二极管D2导通,iL向正方向流动,但持续时间较短。此时变压器原边电压为nu2,电感电压uL=-nu2。
模态5[t4,t5)该模态初始时刻时,iL线性减小至0 并相反增加,电感L和电容C1、C2谐振,在这种模态下的电感电流iL很小,其值接近零。
模态6[t5,t6)如图4(e)所示,该模态初始时刻时uAB=0,uCD=u2,S2导通,谐振状态终止,该阶段电容C1充电至u1,C2放电至0 后续流二极管D2导通,iL流经S2开关管。此时变压器原边电压为nu2,u2向电感L充磁,iL反向增大。


图4 S1 开路故障工作模态
模态7[t6,t7)如图4(f)所示,该模态初始时刻时uAB=-u1,uCD=u2,S4关闭,电容C4充电、C3放电。当C4和C3充、放电至u1和0 时,续流二极管D3导通。因此,电感L由电源u1和u2同时充磁,电感电流iL以斜反向增加。
模态8[t7,t8)如图4(g)所示,该模态初始时刻时uAB=-u1,uCD=-u2,S5和S8关闭,电容C5、C8充电,C6、C7放电,当充电至u2和放电至0 时,D6、D7导通,S6和S7实现零电压开通。在此模态下只有电源u1向电感L供电,电感电流iL以斜率反向增加。
根据每个故障模态的分析,可得各个时刻的电压数据(见表1),根据表中数据可知DAB变换器EPS控制方式,当出现S1故障时,uAB、uL的值变化会与S4故障时变化一致,同理当S2管或S3管故障时,uAB、uL值变化也一致。经分析后可知,在EPS控制下DAB变换器要区分出具体故障管可选取中点电压uA当作特征量为最优。

表1 S1 或S4 故障时电路电压数据
2.2 基于人工智能算法的故障诊断
为能提高实际电路中对含有噪声的电压信号特征学习能力,提高故障诊断的准确度,提出一种基于自适应去噪的神经网络进行DAB电路的故障诊断。
(1)阈值化算法。阈值算法是很多信号降噪算法的核心步骤[15],首先设定一个阈值,幅值若低于这个阈值的特征置为0,高于该阈值的特征朝着零的方向进行收缩,其输出特征

式中:T为阈值;x为输入特征;y为输出特征。
阈值算法如图5 所示。

图5 阈值化算法
阈值分割的核心就是如何选取阈值,选取正确的阈值是有效去噪的关键。传统方法通常使用手动设置阈值进行信号的去噪,也有采用直方图技术法、Otsu算法、熵算法等自动选取全局阈值,也可采用自适应阈值算法自动选取局部阈值。一个理想的自适应阈值算法应该相比于全局阈值算法能够对噪声多变的信号产生更好的去噪效果。类似于图像自适应去噪,在图像像素不均匀的情况下,运用全局阈值算法并无法很好地进行去噪,需要将图像分割为几块进行局部特征的自适应去噪[16]。在故障数据中,同样需要将故障数据样本分为不同模块,利用自适应阈值算法获取局部特征的阈值,除了运用到阈值化算法还需要其他算法来实现自适应的效果。
(2)通道注意力机制算法。若在网络引入通道注意力机制(Channel Attention Module,CAM),计算提取特征的每个通道之间的阈值,可实现电路自适应阈值的去噪,其中通道注意力机制如图6 虚线框内所示。

图6 CAM结构框图
图中:“+”为加法运算;“S”为Sigmoid 计算;“T”为阈值化计算;avg_pool为全局平均池化;max_pool为全局最大池化。CAM中,为让提取的高层次特征能更加丰富,特征输入a分别经一平均池化层以及一最大池化层,其中平均池化层可减小邻域大小受限造成的误差值,最大池化层可减小卷积层参数误差造成的均值误差。为减少网络层的参数,通过2 个卷积层分别进行降维和升维。合并输出得到各特征通道的权重,得到原来特征维度的一个参数。再应用sigmoid函数,使提取到的参数缩放至(0,1),sigmoid函数

式中:b为合并得到的输出特征参数,σ(b)为缩放至0到1 之间的参数。考虑在阈值函数中,阈值若大于输入信号的最大值,输出会全部为零。故需要将阈值在一个范围内进行自适应的设定。每个通道内的阈值

式中:Tc为第c个通道的阈值;σc(b)为第c个通道的特征缩放参数;ac为第c个通道的特征值。得到的Tc便是能够自适应去噪的阈值,若输入的特征值大于某一阈值Tc便进行保留,若特征值小于某一阈值便认定为噪声,进行去除。当特征大时,阈值也会变大,当特征小时,阈值也会变小,能够自适应地进行去噪。
将上述阈值化算法与通道注意力机制算法结合在一起作为一种自适应阈值去噪的算法,应用于电力电子变换器的故障诊断,能解决电路中存在大小不同的噪声,可有效提高故障定位的准确率,上述自适应阈值去噪算法能写入各类卷积神经网络,具有普遍的适用性。
3 半实物仿真设计与实现
3.1 半实物仿真平台搭建
为验证所提故障诊断方法的分类效果,更好地将理论知识与实际实践相结合,将上述故障诊断方案在StarSim HIL 半实物平台上进行验证。该平台由StarSim HIL 仿真器和外部硬件控制器组成。在Matlab的Simulink中搭建一个DAB变换器模型,主电路结构如图7 所示,关键参数选取见表2,将电路模型导入StarSim HIL软件,以TMS320F28069 为核心搭建控制电路,将半实物仿真器与DSP控制器通过外部接口板连接,使控制板对半实物仿真器提供PWM 信号,实现电路的运行。StarSim HIL 可将Simulink 中的模型转换为C 语言代码,并编译成下位机的可执行程序。实时仿真器相应地模拟输出和数字输入端口可以与控制器进行通信,形成一个硬件回路,实现半实物测试,其实验系统框图如图8 所示,搭建的半实物仿真实验测试平台如图9 所示。

表2 系统主要参数

图7 DAB主电路仿真模块
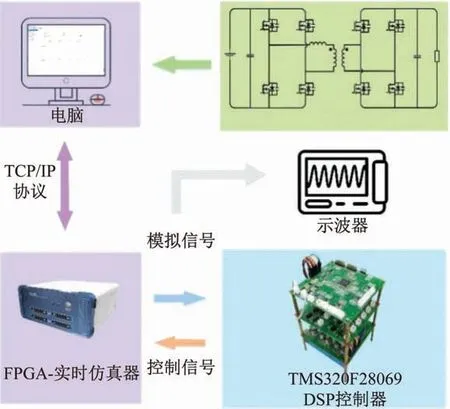
图8 实验系统框图

图9 HIL实验测试平台
3.2 半实物仿真结果验证及分析
搭建好半实物仿真平台后,便可在平台上收集电路特征数据进行故障诊断。根据第2 节分析将中点电压uA作为特征量从半实物仿真平台收集至PC。收集正常状态和9 种不同故障状态下的电路特征数据,具体波形如图10 所示。对每个诊断状态收集3 000 个样本,每个样本长度为1 024,即为一个脉冲周期波形的长度。训练集和测试集按5∶1的比例划分,训练集每个状态2 500 个样本,测试集每个状态500 个样本。

图10 故障电压波形
实验测试的硬件环境为:Intel i7-10750H +NVidia GTX1650ti,软件环境为:Windows10+Python3.6 +Pytorch。将第2 节提出的算法作为非线性层写入一维ResNet网络进行故障诊断测试。实验模型在开始学习之前设置的参数:迭代次数为98;损失函数为交叉熵函数;学习率的衰减规则根据MultiStepLR 函数设置。当训练每过5 个epoch时,学习率便开始下降,学习率的初始值设为0.001,衰减率为0.1。该网络模型的输入维度为样本维度,输出维度为分类数。综合考虑其分类的效果以及参数大小,该模型包括1 个一维卷积层,8 个自适应去噪算法模块,1 个全局平均池层和1 个全连接层。将半实物电路中收集的数据传输回PC后进行故障诊断,具体分类效果如图11 所示,故障分类的准确率能达到99.8%,说明了该网络的分类效果很好。

图11 实验分类结果
为证明该算法拥有去噪的效果,在信噪比(Signal-Noise Ratio,SNR)为-3 dB 的情况下,采用t-SNE 方法对未加入自适应去噪算法的诊断网络和已加入去噪算法的网络进行了可视化,如图12(a)、(b)所示。对比两图,根据每个特征分布可以看出图12(a)中未加入去噪算法的网络由于噪声影响导致特征有部分重合,而图12(b)中加入去噪算法后特征基本可以区分开,得出在高噪声下分类效果依然很好,网络分类效果基本没受到噪声的影响,故所提模型的自适应阈值去噪是有效的。

图12 t-SNE可视化
4 结语
本文以DAB变换器为例,介绍了电力电子电路开路故障的诊断方法,通过分析DAB变换器在EPS控制下的故障模态分析,提出一种基于人工智能的故障诊断算法,该方法融合了电力电子技术以及人工智能等方面的专业知识。根据搭建的半实物仿真平台进行实验,结果表明,本文所提诊断方法可准确判断功率开关管开路故障情况并进行定位,具有较高的可靠性和适应性。学生通过搭建这个半实物仿真平台的实训,能加强实际动手能力,锻炼故障诊断编程方法和实验调试手段。进行多学科结合的教学能帮助学生建立对于学科学习的信心,激发对于学科学习的兴趣,取得更好的实践教学效果。
